等面積原理に基づく pwm 信号の生成と その制御系への応用 · 第1章 序論...
TRANSCRIPT
筑波大学大学院博士課程
システム情報工学研究科修士論文
等面積原理に基づく PWM 信号の生成と その制御系への応用
上野 透 (知能機能システム専攻)
指導教官 堀 憲之 2005 年 1 月
概要
等価面積原理に基づく PWM 信号生成手法を用いて,オンオフアクチュエータを含む系に
対し,サーボアクチュエータを用いた場合と同等の制御精度を持ち,かつオンオフ制御より
外乱耐性のある制御系の構築が可能であることを実験により検証した.この手法を用いる場
合は線形制御手法を用いて設計を行うことになり,設計の手間を省くという効果もある.次
に,制御信号は理想的なパルス制御信号を仮定しているが,それに対する実際のプラントに
入力される圧力の波形は一次遅れの応答となってしまい,等価面積原理が満たされていない.
そのため希望する定常値に満たないことが多いので,パルスの出力時間を補正し,この問題
を解決する手法を提案する.
目次 第 1 章 序論 ···································································································· 1 第 2 章 信号の変換 ··························································································· 2
2.1 PEA(Principle of Equivalent Areas) ···························································· 2 2.2 PWM 信号······························································································· 2
第 3 章 実験装置 ······························································································ 4 3.1 スラスタ制御系 ························································································ 4 3.2 実験装置 ································································································· 5
3.2.1 制御対象 ··························································································· 5 3.2.2 アクチュエータ ·················································································· 5 3.2.3 空気供給部 ························································································ 6 3.2.4 センサ ······························································································ 6 3.2.5 コントローラ ····················································································· 6
3.3 モデリング ······························································································ 6 3.3.1 運動方程式と伝達関数 ········································································· 6 3.3.2 トルクと圧力の関係式 ········································································· 7 3.3.3 パラメータ同定 ·················································································· 8
3.4 圧力と PWM 信号振幅の対応···································································· 10 第 4 章 PWM 信号を用いた回転角制御 ······························································ 11
4.1 実験条件 ······························································································· 11 4.2 考察 ····································································································· 14
第 5 章 定常偏差を改善する PWM 信号の生成····················································· 16 5.1 小パルス幅の測定 ················································································ 16 5.2 小パルス幅を考慮した PWM 信号の生成·················································· 20 5.3 実験結果 ······························································································· 21
第 6 章 オンオフ制御実験 ················································································ 25 6.1 オンオフ制御系の構成 ············································································· 25 6.2 考察 ····································································································· 26 6.3 PWM 信号を用いた場合との比較 ······························································ 27
第 7 章 結論 ·································································································· 31 謝辞 ················································································································· 32 参考文献 ··········································································································· 33
i
図目次
図 2-1 Principle of equivalent Areas ······························································· 2 図 2-2 PWM 信号························································································· 3 図 3-1 実験装置 ··························································································· 4 図 3-2 実験装置の構成 ·················································································· 5 図 3-3 定常値と時定数 ·················································································· 8 図 3-4 供給圧力によるステップ応答の変化 ······················································· 9 図 3-5 ゲイン調整を加えた伝達関数モデルのステップ応答 ································ 10 図 4-1 実験で使用した SIMULINK モデル ····················································· 11 図 4-2 PWM 制御の応答(T=0.2[s]) ································································ 12 図 4-3 PWM 制御の応答(T=0.4[s]) ································································ 12 図 4-4 PWM 制御の応答(T=0.6[s]) ································································ 13 図 4-5 PWM 制御の応答(T=0.8[s]) ································································ 13 図 4-6 PWM 制御の応答(T=1.0[s]) ································································ 14 図 5-1 電磁弁出力ポートの圧力応答(入力パルス幅 0.01[s]) ···························· 17 図 5-2 電磁弁出力ポートの圧力応答(入力パルス幅 0.02[s]) ···························· 17 図 5-3 電磁弁出力ポートの圧力応答(入力パルス幅 0.03[s]) ···························· 18 図 5-4 電磁弁出力ポートの圧力応答(入力パルス幅 0.04[s]) ···························· 18 図 5-5 電磁弁出力ポートの圧力応答(入力パルス幅 0.05[s]) ···························· 19 図 5-6 電磁弁出力ポートの圧力応答(入力パルス幅 0.1[s])······························ 19 図 5-7 増加させるパルス幅の決定 ································································· 21 図 5-8 修正 PWM 信号を用いた応答(T=0.1[s])················································· 22 図 5-9 修正 PWM 信号とローパスフィルタを用いた応答(T=0.1[s]) ····················· 22 図 5-10 修正 PWM 信号を用いた応答(T=0.3[s]) ··············································· 23 図 5-11 修正 PWM 信号とローパスフィルタを用いた応答(T=0.3[s]) ···················· 23 図 5-12 修正 PWM 信号を用いた応答(T=0.5[s]) ··············································· 24 図 5-13 修正 PWM 信号とローパスフィルタを用いた応答(T=0.5[s])···················· 24 図 6-1 オンオフ制御系 ················································································ 25 図 6-2 ヒステリシスを持つ切り替え ······························································ 26 図 6-3 リレー要素の特性改善 ······································································· 26 図 6-4 オンオフ制御による姿勢角制御 ··························································· 27 図 6-5 外乱を含んだ場合の PWM 信号を用いた応答(修正・フィルタ付き)············ 29 図 6-6 外乱を含んだ場合のオンオフ制御応答 ·················································· 29
ii
第1章 序論
アクチュエータにはオンオフ型とサーボ型がある.ここでいうサーボ型アクチュエータと
は,その入力値が連続的に変化できるものであり,応答の正確性や動作の円滑性に優れてい
が,構造は複雑であり高価である.一方オンオフ型アクチュエータとは,あらかじめ決めら
れた 2 つもしくは 3 つの入力値しかとることができないものであり,精度の高い制御を行う
ことはできないが,構造は比較的単純で安価である. オンオフ型アクチュエータを含む制御系の設計には非線形制御理論を用いることが多いの
に対し,サーボ型アクチュエータを含む場合には線形制御理論を用いることもできる.一般
に線形系の方が非線形系より容易に扱うことができる.そこでオンオフ型アクチュエータを
用いる場合にも線形制御理論により設計することができれば便利である. この目的のため本論文では,PWM(Pulse Width Modulation)設計手法を用いて,サーボ
信号をオンオフ信号に変換し,オンオフ型アクチュエータで,サーボ型アクチュエータと次
に述べる意味で同等な制御性能が得られることが可能か実験で検証する.その意味とは等価
面積原理(PEA,Principle of Equivalent Areas)[1]という意味であり,第 2 章で説明する.
以後この PWM 設計手法を用いたオンオフ型アクチュエータを含む制御系を PWM 制御系と
呼び,その制御を PWM 制御と呼ぶ. 本研究で用いる実験装置は,空気をオンオフで噴出することにより推進力を得るスラスタ
制御系であり,これを一軸回転系の角度制御に適用した.この装置を用いて一般のオンオフ
制御と,提案する PWM 制御との比較を行い PWM 制御の有効性を示す. 本論文の構成は以下の通りである. 第 2 章 サーボ信号から PWM 信号への変換理論 第 3 章 スラスタ制御系の構成 第 4 章 PWM 制御実験 第 5 章 パルス幅を調節による PWM 制御の応答改善 第 6 章 従来のオンオフ制御との比較 第 7 章 結論
1
第2章 信号の変換 サーボ信号をオンオフ信号に変換するため,PWM 設計手法を用いる.ここで述べる手法は
PEA に基づく.
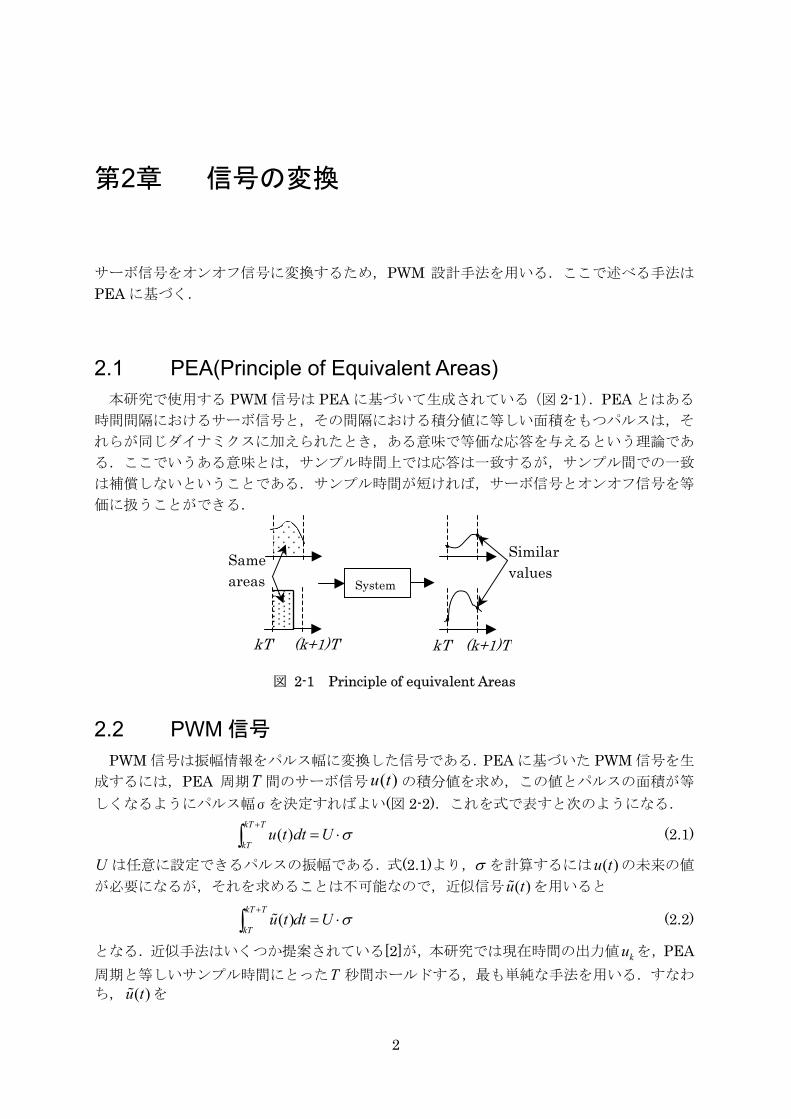
2.1 PEA(Principle of Equivalent Areas) 本研究で使用する PWM 信号は PEA に基づいて生成されている(図 2-1).PEA とはある
時間間隔におけるサーボ信号と,その間隔における積分値に等しい面積をもつパルスは,そ
れらが同じダイナミクスに加えられたとき,ある意味で等価な応答を与えるという理論であ
る.ここでいうある意味とは,サンプル時間上では応答は一致するが,サンプル間での一致
は補償しないということである.サンプル時間が短ければ,サーボ信号とオンオフ信号を等
価に扱うことができる.
Similar values
Same areas
kT (k+1)T
System
kT (k+1)T
図 2-1 Principle of equivalent Areas
2.2 PWM 信号 PWM 信号は振幅情報をパルス幅に変換した信号である.PEA に基づいた PWM 信号を生
成するには,PEA 周期T 間のサーボ信号 の積分値を求め,この値とパルスの面積が等
しくなるようにパルス幅σを決定すればよい(図 2-2).これを式で表すと次のようになる. ( )u t
( )kT T
kTu t dt U σ
+= ⋅∫ (2.1)
U は任意に設定できるパルスの振幅である.式(2.1)より,σ を計算するにはu t の未来の値
が必要になるが,それを求めることは不可能なので,近似信号u t を用いると ( )
( )
( )kT T
kTu t dt U σ
+= ⋅∫ (2.2)
となる.近似手法はいくつか提案されている[2]が,本研究では現在時間の出力値 を,PEA周期と等しいサンプル時間にとった 秒間ホールドする, も単純な手法を用いる.すなわ
ち,u t を
kuT
( )
2
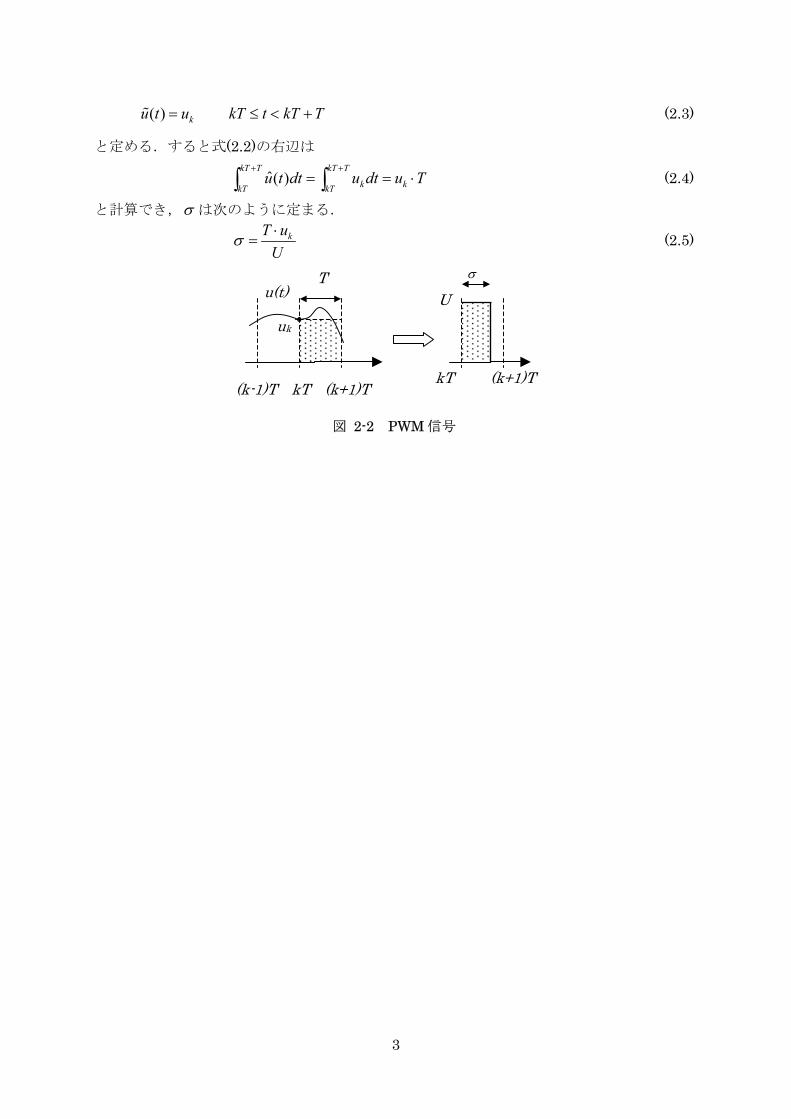
( ) ku t u= (2.3) kT t kT T≤ < +
と定める.すると式(2.2)の右辺は
ˆ( )kT T kT T
k kkT kTu t dt u dt u T
+ += =∫ ∫ ⋅ (2.4)
と計算でき,σ は次のように定まる. kT u
Uσ ⋅= (2.5)
σu(t)
T
uk
U
kT (k+1)T
(k-1)T kT (k+1)T
図 2-2 PWM 信号
3

第3章 実験装置
本章ではスラスタ制御系の特徴と,その実験装置(図 3-1)について述べる.
3.1 スラスタ制御系 人工衛星の姿勢を制御するシステムの1つにスラスタ制御系と呼ばれるものがある.スラ
スタとは,ノズルから質量を高速で外部に放出することによって得られる反力を制御トルク
に利用する機構である.スラスタ制御系は微妙な制御が難しいが,大きなトルクを発生させ
ることが可能なので主に衛星の軌道制御や初期捕捉に用いられている.一般にスラスタ制御
系は弁の開閉によるオンオフ制御を行う.アクチュエータにオンオフ弁を用いているためで
ある.宇宙空間のような過酷な条件下では,構造が単純で動作の信頼性の高い,オンオフア
クチュエータの使用が望ましい.しかしオンオフ弁はスラスタの噴射レベルを変えることは
できない.よって入力信号に比例した出力を得るという線形特性をもたせることが難しく,
これまで非線形手法を用いて制御系の設計を行うことが多かった.特に,干渉のある多入力
多出力の複雑なシステムでは,解析を繰り返す作業に時間がかかり大変面倒であった.PWM信号を用いて噴射時間を制御することができれば,線形理論を用いた制御系設計が可能にな
る.
図 3-1 実験装置
4
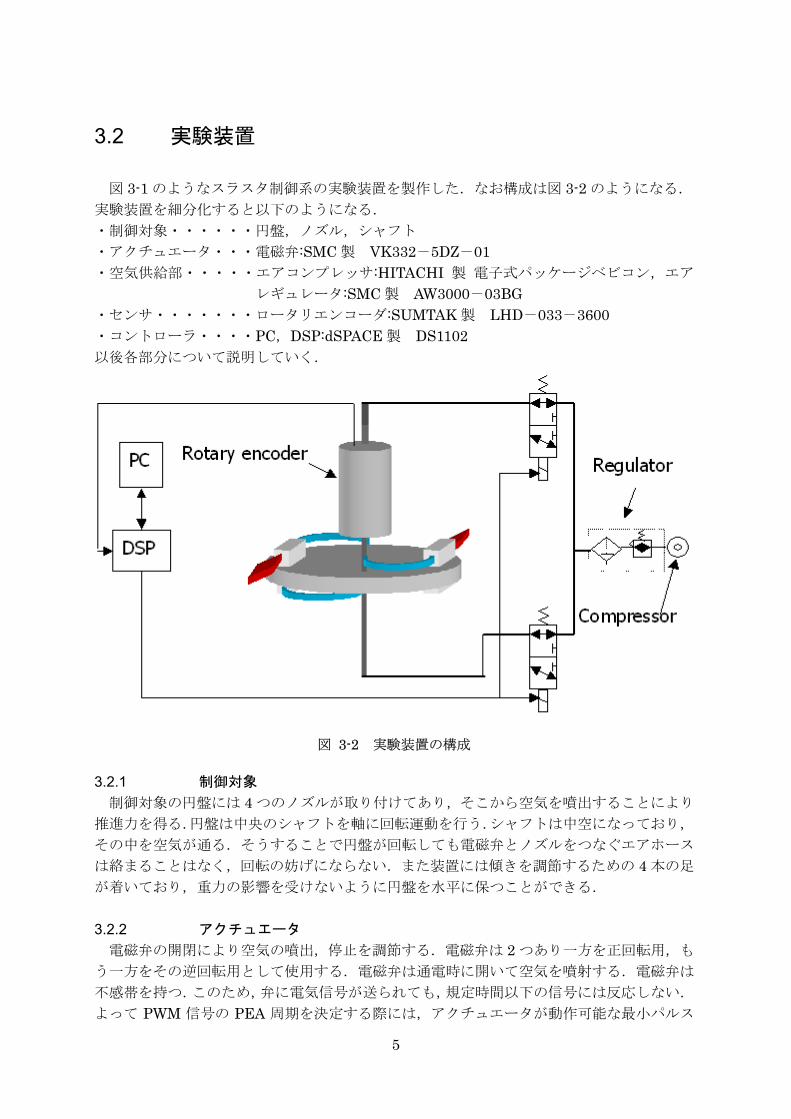
3.2 実験装置
図 3-1 のようなスラスタ制御系の実験装置を製作した.なお構成は図 3-2 のようになる. 実験装置を細分化すると以下のようになる. ・制御対象・・・・・・円盤,ノズル,シャフト ・アクチュエータ・・・電磁弁:SMC 製 VK332-5DZ-01 ・空気供給部・・・・・エアコンプレッサ:HITACHI 製 電子式パッケージベビコン,エア
レギュレータ:SMC 製 AW3000-03BG ・センサ・・・・・・・ロータリエンコーダ:SUMTAK 製 LHD-033-3600 ・コントローラ・・・・PC,DSP:dSPACE 製 DS1102 以後各部分について説明していく.
図 3-2 実験装置の構成
3.2.1 制御対象 制御対象の円盤には 4 つのノズルが取り付けてあり,そこから空気を噴出することにより
推進力を得る.円盤は中央のシャフトを軸に回転運動を行う.シャフトは中空になっており,
その中を空気が通る.そうすることで円盤が回転しても電磁弁とノズルをつなぐエアホース
は絡まることはなく,回転の妨げにならない.また装置には傾きを調節するための 4 本の足
が着いており,重力の影響を受けないように円盤を水平に保つことができる. 3.2.2 アクチュエータ
電磁弁の開閉により空気の噴出,停止を調節する.電磁弁は 2 つあり一方を正回転用,も
う一方をその逆回転用として使用する.電磁弁は通電時に開いて空気を噴射する.電磁弁は
不感帯を持つ.このため,弁に電気信号が送られても,規定時間以下の信号には反応しない.
よって PWM 信号の PEA 周期を決定する際には,アクチュエータが動作可能な 小パルス
5
幅を考慮する必要がある.なお使用する電磁弁の 小応答時間は 0.01[s]である. 3.2.3 空気供給部
ノズルから噴出する空気はコンプレッサで圧縮・乾燥される.コンプレッサにはタンクが
内蔵されており,圧縮された空気をタンク内に溜める.タンク内の圧力が 0.93[MPa]まで上
昇すると運転を停止し,空気の噴射により 0.78[MPa]まで下降すると再び運転を開始する.
また上流圧力を一定にするためにレギュレータを使用する.レギュレータは 0.05~0.85MPaの範囲で制御圧力を調節することが可能である. 3.2.4 センサ
制御対象の回転角を計測するセンサに,ロータリエンコーダを用いる.現在使用している
エンコーダは接触型のため,制御対象の運動時に抵抗となるが,その影響は実験により検証
する. 3.2.5 コントローラ
DSP1102 は A/D,D/A 変換を備えており,PC と組み合わせることでセンサから取り込ん
だ信号をもとに,電磁弁に出力する信号を計算する.また,SIMULINK/S-function で作成
した PWM 信号生成ブロックを自動的に c コードモデルに変換し,リアルタイムハードウェ
アにダウンロードして実験を行う.なお PWM 信号生成ブロックは c プログラムで作成した
ものを使用する.
3.3 モデリング 3.3.1 運動方程式と伝達関数 モデル化した制御対象に働く力を式で表す.回転系の運動方程式を立てると
( ) ( ) ( ) ( ) { ( )}J t c t t t k sign v tθ θ τ τ= − + = ⋅ (3.1)
となる.ただしτ は対象に働くトルク,θは回転角, は慣性モーメント, は粘性摩擦係
数である.vは入力電圧であるが,アクチュエータは一定の値しか受け取ることができない.
よって入力電圧によるトルクの大きさは一定で,正負の違いのみがトルクに影響する.次に
初期値を無視して式(3.1)をラプラス変換すると
J c
2 ( ) ( ) ( )Js s cs s sθ θ τ+ = (3.2)
ここで出力 ( )sθ について解くと
2
1( ) ( )sJs cs
sθ τ=+
(3.3)
よって制御対象の ( )sτ から ( )sθ までの伝達関数は
1( )( ) (
J bP ss s c J s s a
= =+ +
ただしcaJ
= ,1J
b = (3.4) )
となる. 制御対象が回転する時,静止摩擦やクーロン摩擦が働く.本論文では摩擦に対して十分大
6
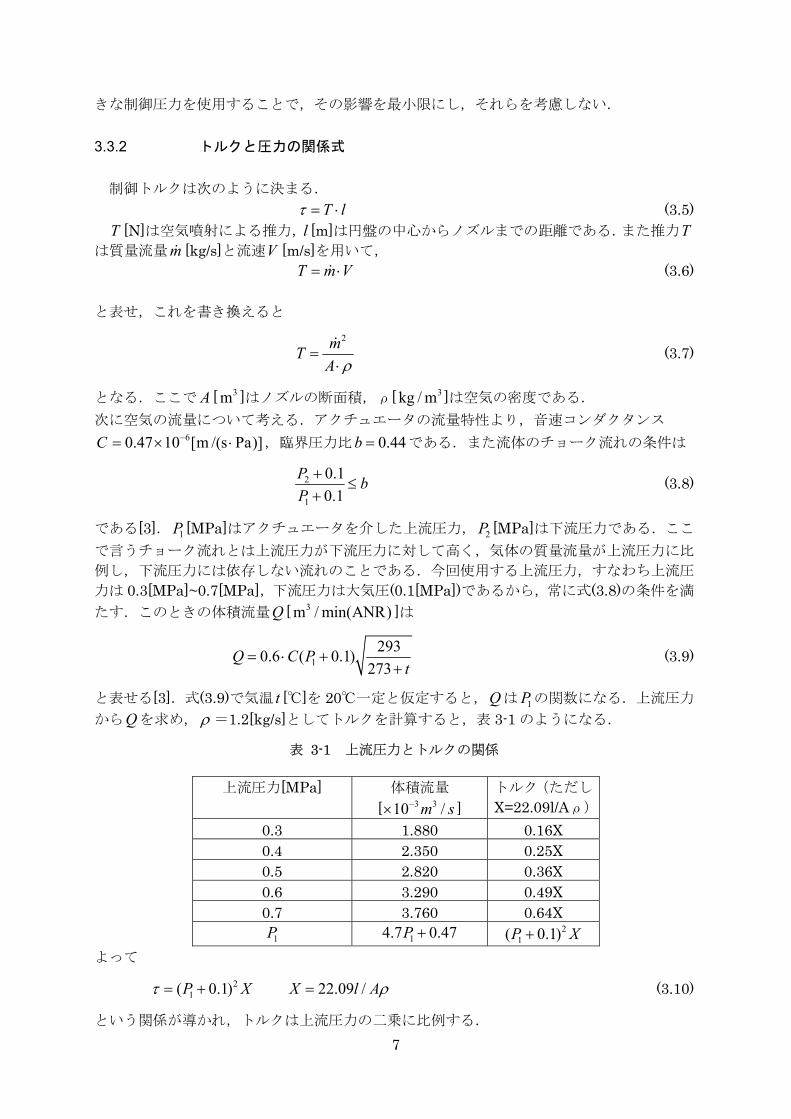
きな制御圧力を使用することで,その影響を 小限にし,それらを考慮しない. 3.3.2 トルクと圧力の関係式 制御トルクは次のように決まる.
T lτ = ⋅ (3.5) T [N]は空気噴射による推力,l [m]は円盤の中心からノズルまでの距離である.また推力T
は質量流量 [kg/s]と流速V [m/s]を用いて, mT m V= ⋅ (3.6)
と表せ,これを書き換えると
2mTA ρ
=⋅
(3.7)
となる.ここで [ ]はノズルの断面積,ρ[ ]は空気の密度である. A 3m 3kg /m次に空気の流量について考える.アクチュエータの流量特性より,音速コンダクタンス C 60.47 10 [m /(s Pa)]−= × ⋅ ,臨界圧力比 0.44b = である.また流体のチョーク流れの条件は
2
1
0.10.1
P bP+
≤+
(3.8)
である[3].P [MPa]はアクチュエータを介した上流圧力,P [MPa]は下流圧力である.ここ
で言うチョーク流れとは上流圧力が下流圧力に対して高く,気体の質量流量が上流圧力に比
例し,下流圧力には依存しない流れのことである.今回使用する上流圧力,すなわち上流圧
力は 0.3[MPa]~0.7[MPa],下流圧力は大気圧(0.1[MPa])であるから,常に式(3.8)の条件を満
たす.このときの体積流量 [ ]は
1 2
Q 3m /min(ANR)
12930.6 ( 0.1)273
Q C Pt
= ⋅ ++
(3.9)
と表せる[3].式(3.9)で気温 [℃]を 20℃一定と仮定すると,Qは の関数になる.上流圧力
からQを求め,
t 1Pρ =1.2[kg/s]としてトルクを計算すると,表 3-1 のようになる.
表 3-1 上流圧力とトルクの関係
上流圧力[MPa] 体積流量
[× ] 3 310 /m s−
トルク(ただし
X=22.09l/Aρ) 0.3 1.880 0.16X 0.4 2.350 0.25X 0.5 2.820 0.36X 0.6 3.290 0.49X 0.7 3.760 0.64X 1P 14.7 0.47P + 2
1( 0.1)P X+ よって
21( 0.1) 22.09 /P X X l Aτ ρ= + = (3.10)
という関係が導かれ,トルクは上流圧力の二乗に比例する. 7
3.3.3 パラメータ同定 導出したモデルのパラメータ , を求める.式(3.1)においてa b ( ) ( )y t tθ= とおくと,
( ) ( ) ( )Jy t cy t tτ= − + (3.11)
となる.初期値を無視してラプラス変換し, ( )sτ から までの伝達関数を求めると, ( )y s
1( ) ,d
b cP s a bs a J J
= =+
= (3.12)
となり,出力が角速度となる一次系の伝達関数で表すことができる.式(3.12)を一次遅れ要
素の標準形で表すと, 1( ) ,
1dK bP s T KTs a a
= =+
= (3.13)
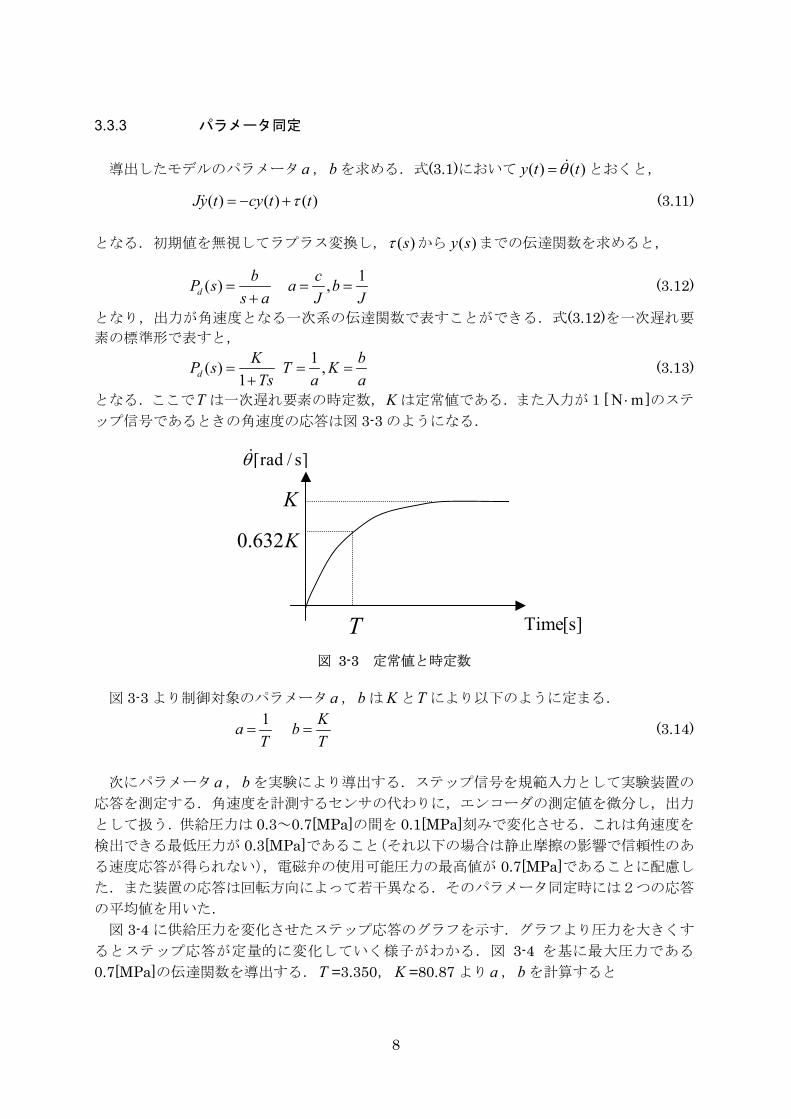
となる.ここでTは一次遅れ要素の時定数,Kは定常値である.また入力が1[ ]のステ
ップ信号であるときの角速度の応答は図 3-3 のようになる. N m⋅
K
K
T
0.632
Time[s]
[rad / s]θ
図 3-3 定常値と時定数
図 3-3 より制御対象のパラメータ ,bは とTにより以下のように定まる. a K1 Ka bT T
= = (3.14)
次にパラメータ ,bを実験により導出する.ステップ信号を規範入力として実験装置の
応答を測定する.角速度を計測するセンサの代わりに,エンコーダの測定値を微分し,出力
として扱う.供給圧力は 0.3~0.7[MPa]の間を 0.1[MPa]刻みで変化させる.これは角速度を
検出できる 低圧力が 0.3[MPa]であること(それ以下の場合は静止摩擦の影響で信頼性のあ
る速度応答が得られない),電磁弁の使用可能圧力の 高値が 0.7[MPa]であることに配慮し
た.また装置の応答は回転方向によって若干異なる.そのパラメータ同定時には2つの応答
の平均値を用いた.
a
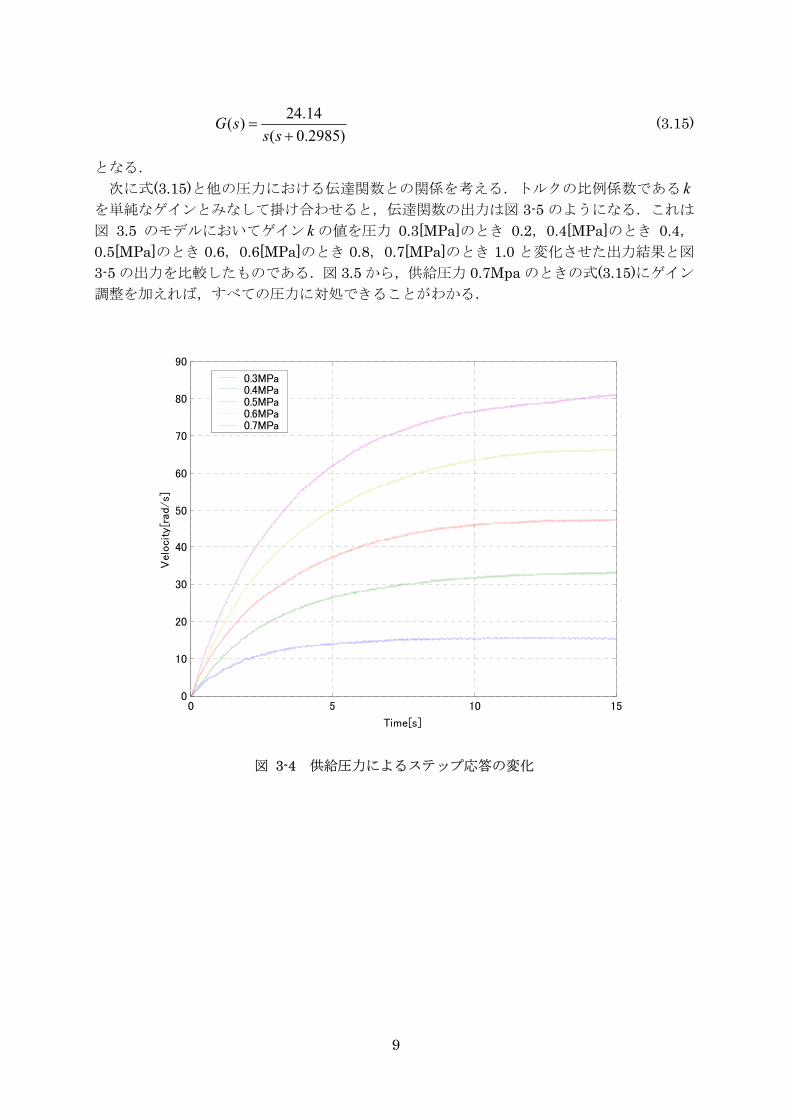
図 3-4 に供給圧力を変化させたステップ応答のグラフを示す.グラフより圧力を大きくす
るとステップ応答が定量的に変化していく様子がわかる.図 3-4 を基に 大圧力である
0.7[MPa]の伝達関数を導出する.T =3.350, =80.87 より , を計算すると K a b
8
24.14( )( 0.2985)
G ss s
=+
(3.15)
となる. 次に式(3.15)と他の圧力における伝達関数との関係を考える.トルクの比例係数である k
を単純なゲインとみなして掛け合わせると,伝達関数の出力は図 3-5 のようになる.これは
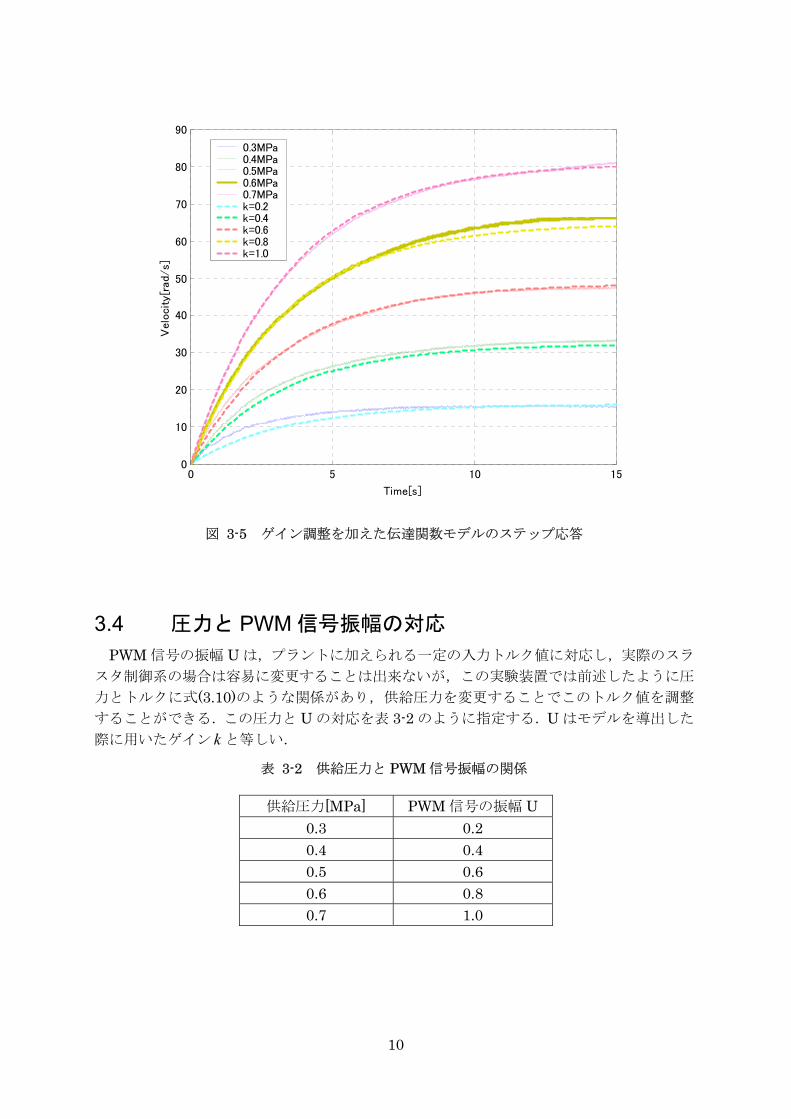
図 3.5 のモデルにおいてゲイン kの値を圧力 0.3[MPa]のとき 0.2,0.4[MPa]のとき 0.4,0.5[MPa]のとき 0.6,0.6[MPa]のとき 0.8,0.7[MPa]のとき 1.0 と変化させた出力結果と図
3-5 の出力を比較したものである.図 3.5 から,供給圧力 0.7Mpa のときの式(3.15)にゲイン
調整を加えれば,すべての圧力に対処できることがわかる.
0 5 10 150
10
20
30
40
50
60
70
80
90
Time[s]
Velo
city
[rad
/s]
0.3MPa0.4MPa0.5MPa0.6MPa0.7MPa
図 3-4 供給圧力によるステップ応答の変化
9
0 5 10 150
10
20
30
40
50
60
70
80
90
Time[s]
Velo
city
[rad
/s]
0.3MPa0.4MPa0.5MPa0.6MPa0.7MPak=0.2 k=0.4 k=0.6 k=0.8 k=1.0
図 3-5 ゲイン調整を加えた伝達関数モデルのステップ応答
3.4 圧力と PWM 信号振幅の対応 PWM 信号の振幅 U は,プラントに加えられる一定の入力トルク値に対応し,実際のスラ
スタ制御系の場合は容易に変更することは出来ないが,この実験装置では前述したように圧
力とトルクに式(3.10)のような関係があり,供給圧力を変更することでこのトルク値を調整
することができる.この圧力と U の対応を表 3-2 のように指定する.U はモデルを導出した
際に用いたゲイン と等しい. k
表 3-2 供給圧力と PWM 信号振幅の関係
供給圧力[MPa] PWM 信号の振幅 U 0.3 0.2 0.4 0.4 0.5 0.6 0.6 0.8 0.7 1.0
10
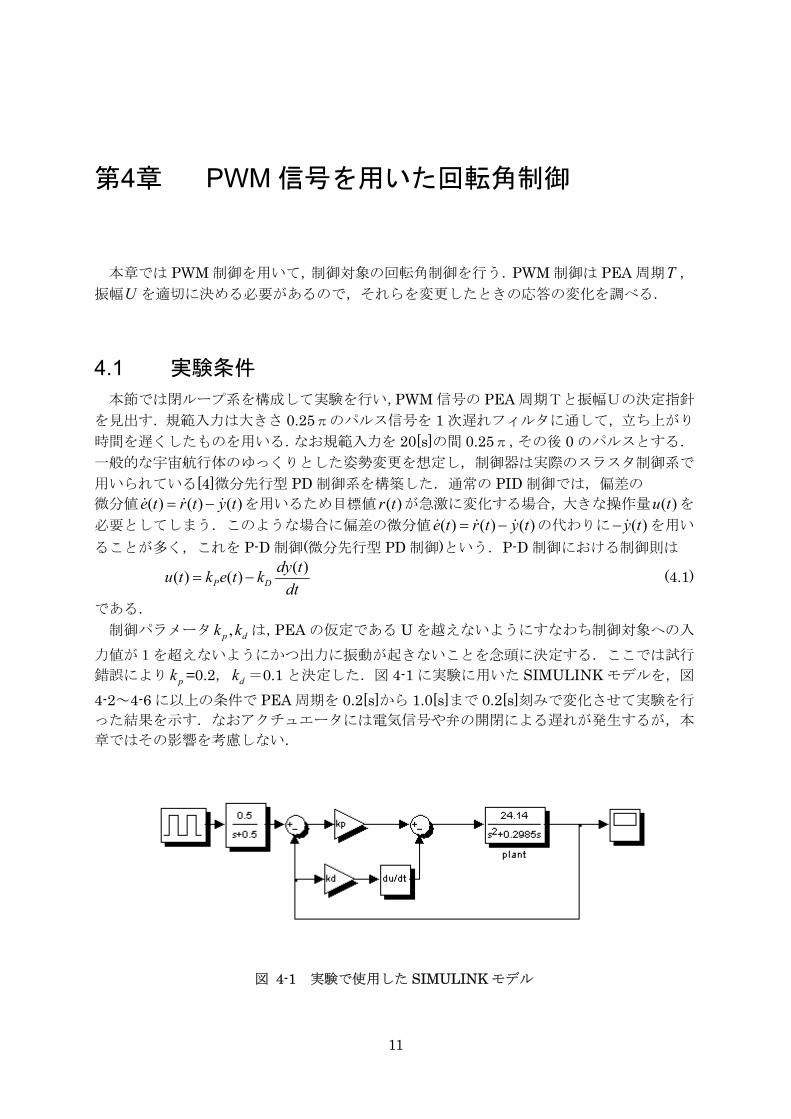
第4章 PWM 信号を用いた回転角制御
本章では PWM 制御を用いて,制御対象の回転角制御を行う.PWM 制御は PEA 周期 ,
振幅U を適切に決める必要があるので,それらを変更したときの応答の変化を調べる. T
4.1 実験条件 本節では閉ループ系を構成して実験を行い,PWM 信号の PEA 周期Tと振幅Uの決定指針
を見出す.規範入力は大きさ 0.25πのパルス信号を 1 次遅れフィルタに通して,立ち上がり
時間を遅くしたものを用いる.なお規範入力を 20[s]の間 0.25π,その後 0 のパルスとする.
一般的な宇宙航行体のゆっくりとした姿勢変更を想定し,制御器は実際のスラスタ制御系で
用いられている[4]微分先行型 PD 制御系を構築した.通常の PID 制御では,偏差の 微分値 を用いるため目標値 が急激に変化する場合,大きな操作量u t を
必要としてしまう.このような場合に偏差の微分値 e t( ) ( ) ( )e t r t y t= − ( )r t ( )
( ) ( ) ( )r t y t= − の代わりに− を用い
ることが多く,これを P-D 制御(微分先行型 PD 制御)という.P-D 制御における制御則は ( )y t
( )( ) ( )P Ddy tu t k e t kdt
= − (4.1)
である. 制御パラメータ は,PEA の仮定である U を越えないようにすなわち制御対象への入
力値が1を超えないようにかつ出力に振動が起きないことを念頭に決定する.ここでは試行
錯誤により =0.2, =0.1 と決定した.図 4-1 に実験に用いた SIMULINK モデルを,図
4-2~4-6 に以上の条件で PEA 周期を 0.2[s]から 1.0[s]まで 0.2[s]刻みで変化させて実験を行
った結果を示す.なおアクチュエータには電気信号や弁の開閉による遅れが発生するが,本
章ではその影響を考慮しない.
,p dk k
dkpk
図 4-1 実験で使用した SIMULINK モデル
11
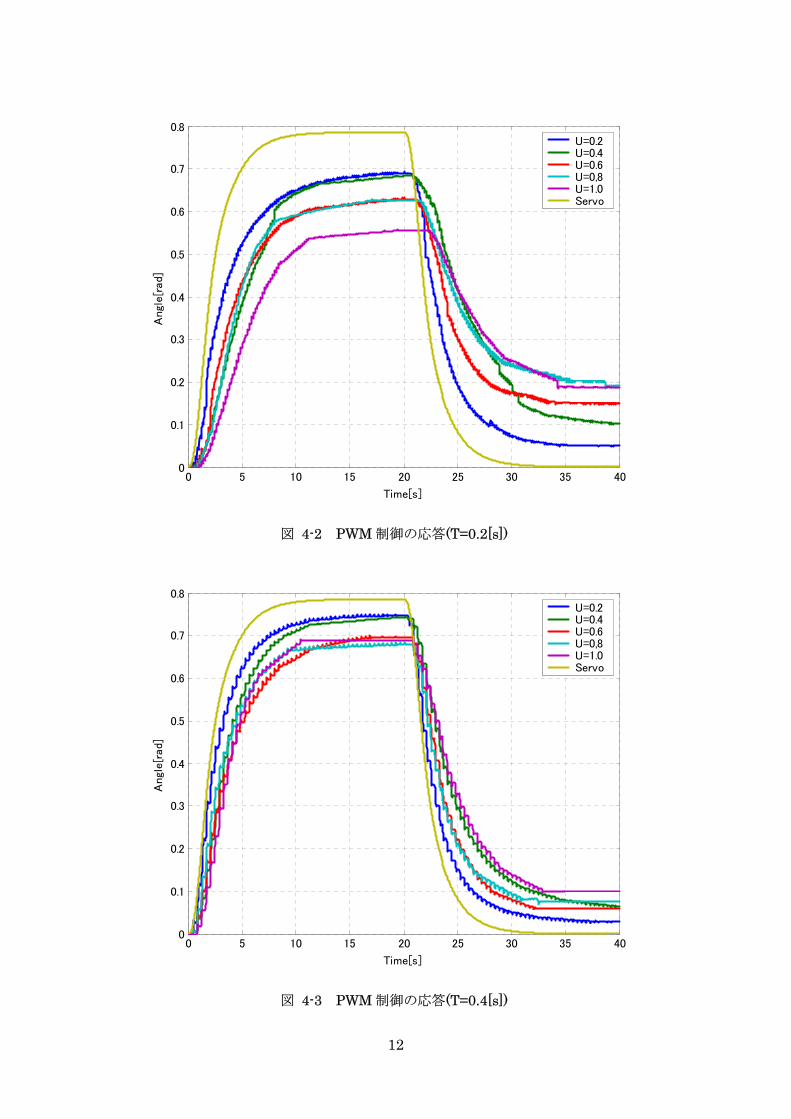
0 5 10 15 20 25 30 35 400
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Time[s]
Angl
e[r
ad]
U=0.2U=0.4U=0.6U=0,8U=1.0Servo
図 4-2 PWM 制御の応答(T=0.2[s])
0 5 10 15 20 25 30 35 400
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Time[s]
Angl
e[r
ad]
U=0.2U=0.4U=0.6U=0,8U=1.0Servo
図 4-3 PWM 制御の応答(T=0.4[s])
12

0 5 10 15 20 25 30 35 400
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Time[s]
Angl
e[r
ad]
U=0.2U=0.4U=0.6U=0,8U=1.0Servo
図 4-4 PWM 制御の応答(T=0.6[s])
0 5 10 15 20 25 30 35 400
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Time[s]
Angl
e[r
ad]
U=0.2U=0.4U=0.6U=0,8U=1.0Servo
図 4-5 PWM 制御の応答(T=0.8[s])
13
0 5 10 15 20 25 30 35 400
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Time[s]
Angl
e[r
ad]
U=0.2U=0.4U=0.6U=0,8U=1.0Servo
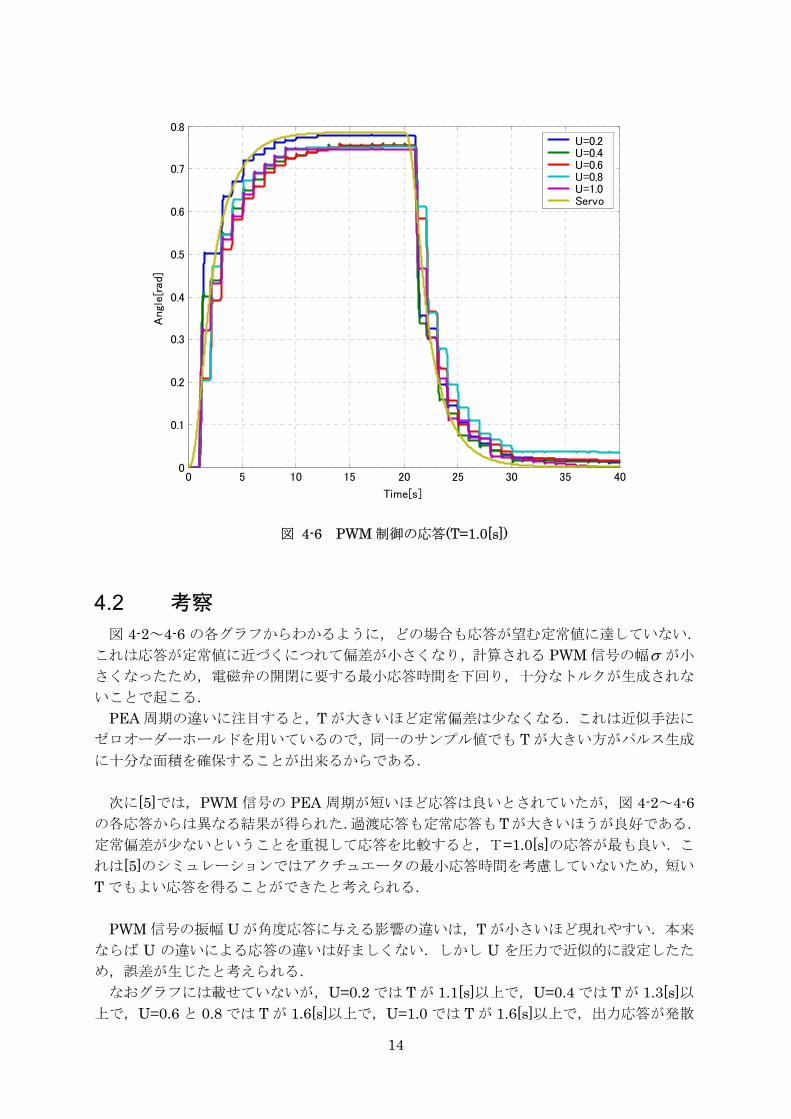
図 4-6 PWM 制御の応答(T=1.0[s])
4.2 考察 図 4-2~4-6 の各グラフからわかるように,どの場合も応答が望む定常値に達していない.
これは応答が定常値に近づくにつれて偏差が小さくなり,計算される PWM 信号の幅σ が小
さくなったため,電磁弁の開閉に要する 小応答時間を下回り,十分なトルクが生成されな
いことで起こる. PEA 周期の違いに注目すると,T が大きいほど定常偏差は少なくなる.これは近似手法に
ゼロオーダーホールドを用いているので,同一のサンプル値でも T が大きい方がパルス生成
に十分な面積を確保することが出来るからである. 次に[5]では,PWM 信号の PEA 周期が短いほど応答は良いとされていたが,図 4-2~4-6
の各応答からは異なる結果が得られた.過渡応答も定常応答もTが大きいほうが良好である.
定常偏差が少ないということを重視して応答を比較すると,T=1.0[s]の応答が も良い.こ
れは[5]のシミュレーションではアクチュエータの 小応答時間を考慮していないため,短い
T でもよい応答を得ることができたと考えられる. PWM 信号の振幅 U が角度応答に与える影響の違いは,T が小さいほど現れやすい.本来
ならば U の違いによる応答の違いは好ましくない.しかし U を圧力で近似的に設定したた
め,誤差が生じたと考えられる. なおグラフには載せていないが,U=0.2 では T が 1.1[s]以上で,U=0.4 では T が 1.3[s]以
上で,U=0.6 と 0.8 では T が 1.6[s]以上で,U=1.0 では T が 1.6[s]以上で,出力応答が発散
14
する.このことからも U が大きい方が長い PEA 周期まで対応可能だとわかる. また特筆すべき点は,プラント入力には微分演算によるノイズが含まれているが,その影
響をほとんど受けていないという点である.サンプル時間ごとにしか入力を参照しないため
このようなことが起こると考えられる.PWM 信号を含む制御系はノイズに強いと言える. これらのことから, ・PWM 信号の PEA 周期は 小パルス幅を考慮することが望ましい ・T が小さい時には U も小さく,T が大きい時には U も大きく選ぶことが望ましい ・T が小さい場合,応答は収束するが定常偏差が残る ・T が大きい場合,応答は発散しやすい ・PWM 信号を用いた制御系はノイズに強い
ということが判明した.
15
第5章 定常偏差を改善する PWM 信号の生成
バルブ開閉の遅れを考慮しないと,PEA を用いても PWM 信号による制御では角度に定常
偏差が残ることが第 4 章の実験で判明した.ここではこのバルブ特性も考慮して制御パルス
の時間幅を調節することで,応答の改善を図る.
5.1 最小パルス幅の測定 前章では生成されたパルス幅が小さい時,電磁弁の 小応答時間との兼ね合いで,十分な
トルクが出力されず,応答が定常値まで達していなかった.ここでは電磁弁の 小応答時間
を考慮した PWM 信号の生成を提案する.前章の応答よりも定常偏差減らすことを目標とす
る.
幅の短いパルスが入力された際の電磁弁の開閉を確かめるため,圧力センサを電磁弁の出
力ポートに並列接続し,圧力の応答を測定する.圧力が検知されれば電磁弁が開いているこ
とがわかる.なお測定には以下の機器を使用する. ・圧力センサ(共和電業製 PGM-10KC) このセンサはひずみゲージ式の圧力変換器で,固有振動数は 40[kHz]である.測定する
小のパルス幅 0.01[s](0.1[kHz])を考慮し,実験で行う動作の周波数帯よりも十分大きなバン
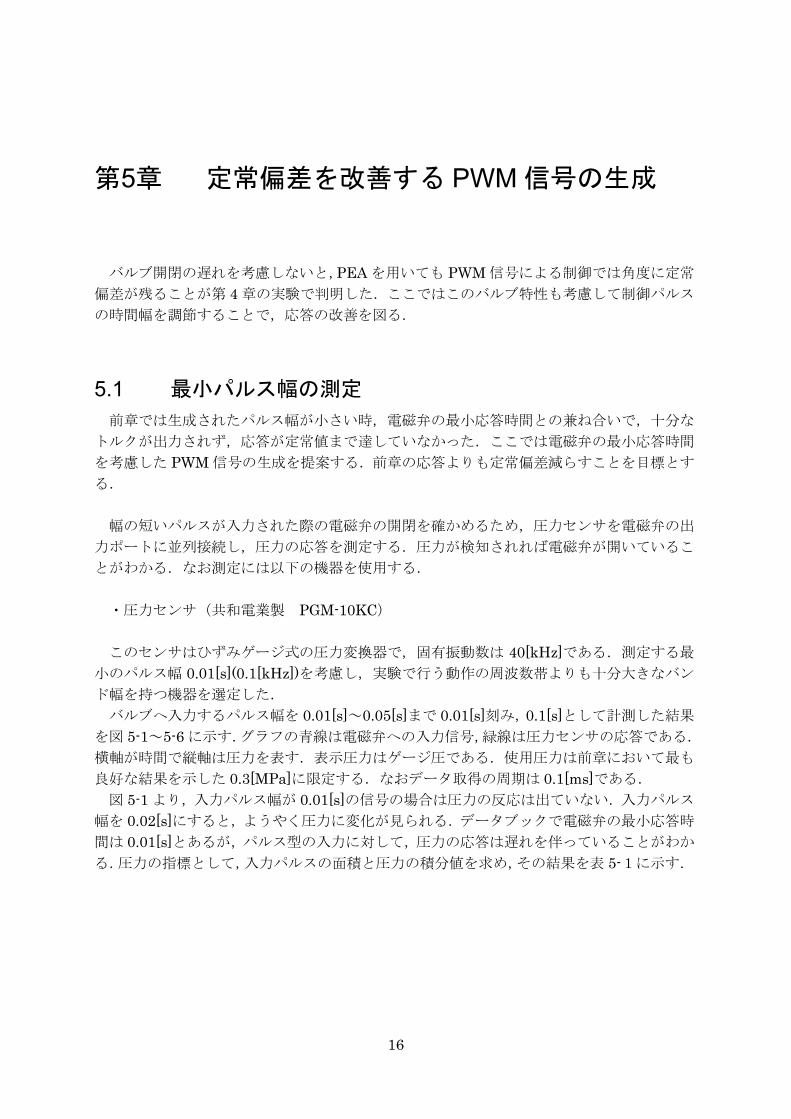
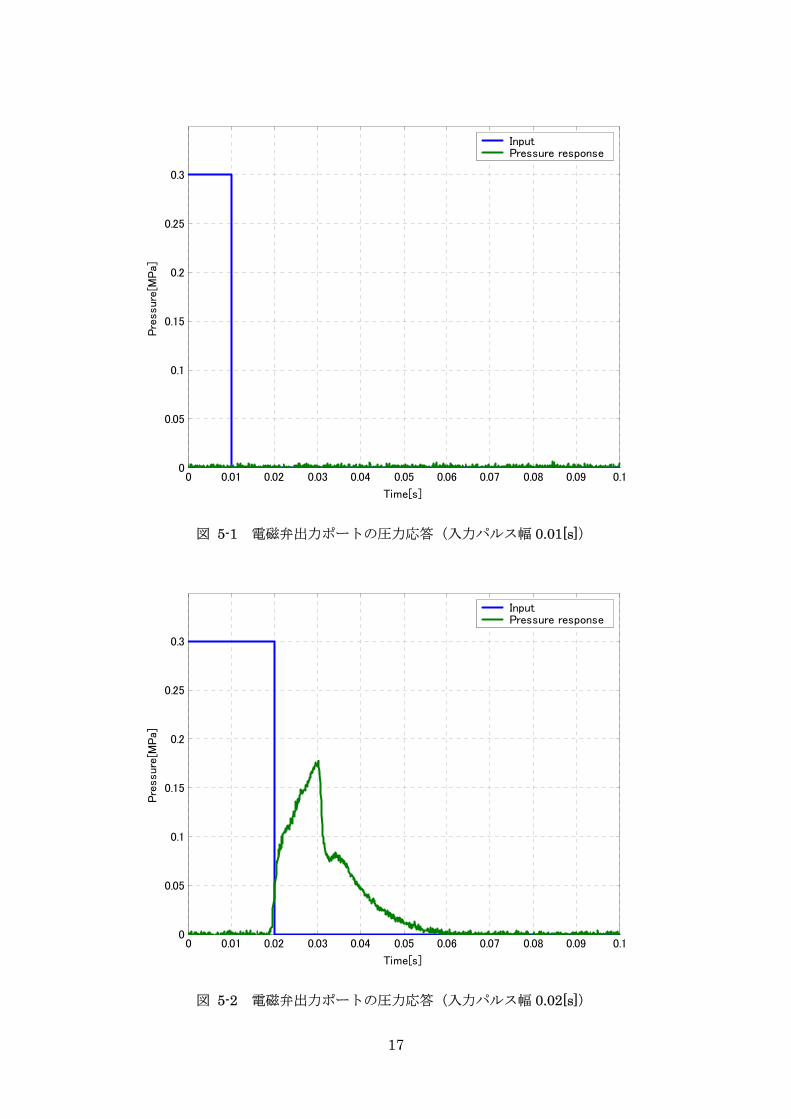
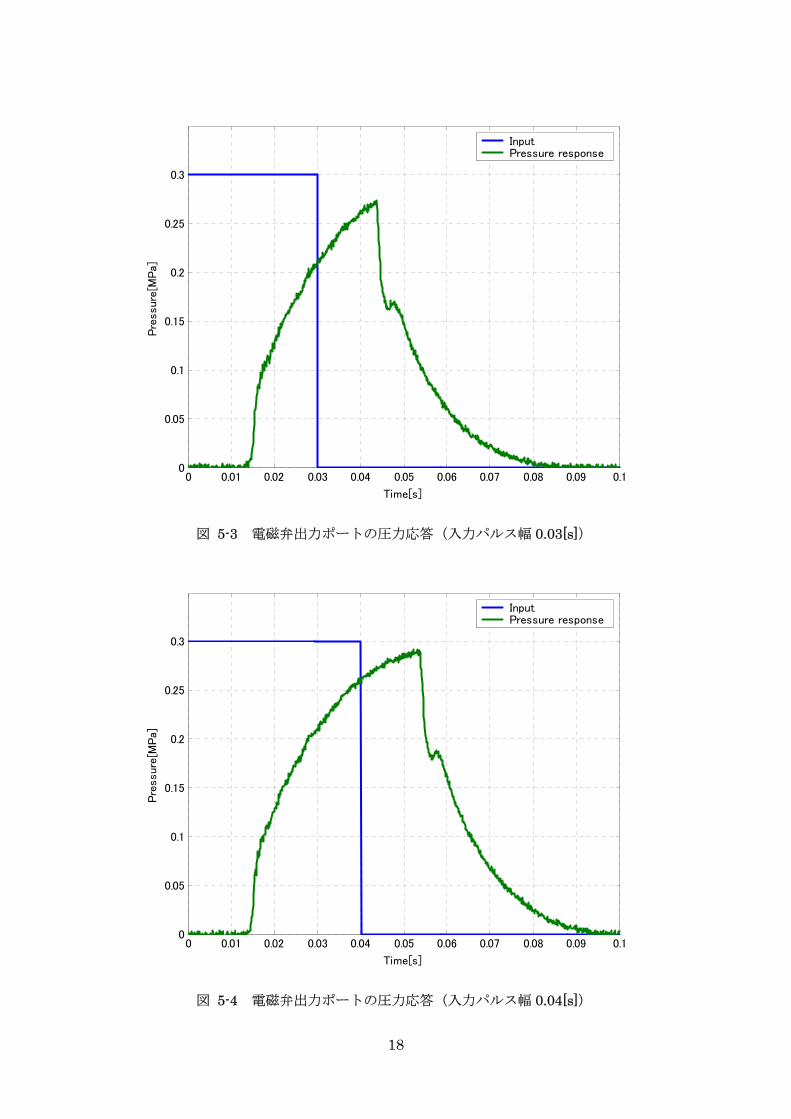
ド幅を持つ機器を選定した. バルブへ入力するパルス幅を 0.01[s]~0.05[s]まで 0.01[s]刻み,0.1[s]として計測した結果
を図 5-1~5-6 に示す.グラフの青線は電磁弁への入力信号,緑線は圧力センサの応答である.
横軸が時間で縦軸は圧力を表す.表示圧力はゲージ圧である.使用圧力は前章において も
良好な結果を示した 0.3[MPa]に限定する.なおデータ取得の周期は 0.1[ms]である. 図 5-1 より,入力パルス幅が 0.01[s]の信号の場合は圧力の反応は出ていない.入力パルス
幅を 0.02[s]にすると,ようやく圧力に変化が見られる.データブックで電磁弁の 小応答時
間は 0.01[s]とあるが,パルス型の入力に対して,圧力の応答は遅れを伴っていることがわか
る.圧力の指標として,入力パルスの面積と圧力の積分値を求め,その結果を表 5-1に示す.
16
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
0.05
0.1
0.15
0.2
0.25
0.3
Time[s]
Pre
ssure
[MPa]
InputPressure response
図 5-1 電磁弁出力ポートの圧力応答(入力パルス幅 0.01[s])
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
0.05
0.1
0.15
0.2
0.25
0.3
Time[s]
Pre
ssure
[MPa]
InputPressure response
図 5-2 電磁弁出力ポートの圧力応答(入力パルス幅 0.02[s])
17
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
0.05
0.1
0.15
0.2
0.25
0.3
Time[s]
Pre
ssure
[MPa]
InputPressure response
図 5-3 電磁弁出力ポートの圧力応答(入力パルス幅 0.03[s])
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
0.05
0.1
0.15
0.2
0.25
0.3
Time[s]
Pre
ssure
[MPa]
InputPressure response
図 5-4 電磁弁出力ポートの圧力応答(入力パルス幅 0.04[s])
18
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
0.05
0.1
0.15
0.2
0.25
0.3
Time[s]
Pre
ssure
[MPa]
InputPressure response
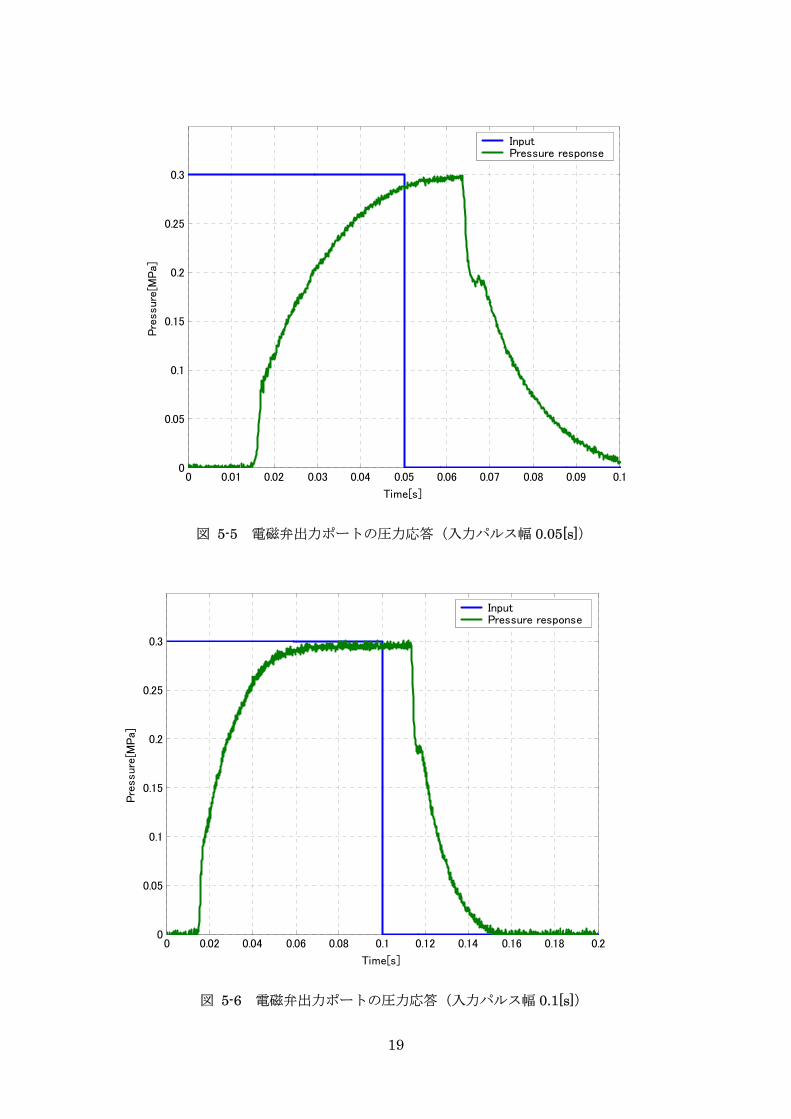
図 5-5 電磁弁出力ポートの圧力応答(入力パルス幅 0.05[s])
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
0.05
0.1
0.15
0.2
0.25
0.3
Time[s]
Pre
ssure
[MPa]
InputPressure response
図 5-6 電磁弁出力ポートの圧力応答(入力パルス幅 0.1[s])
19
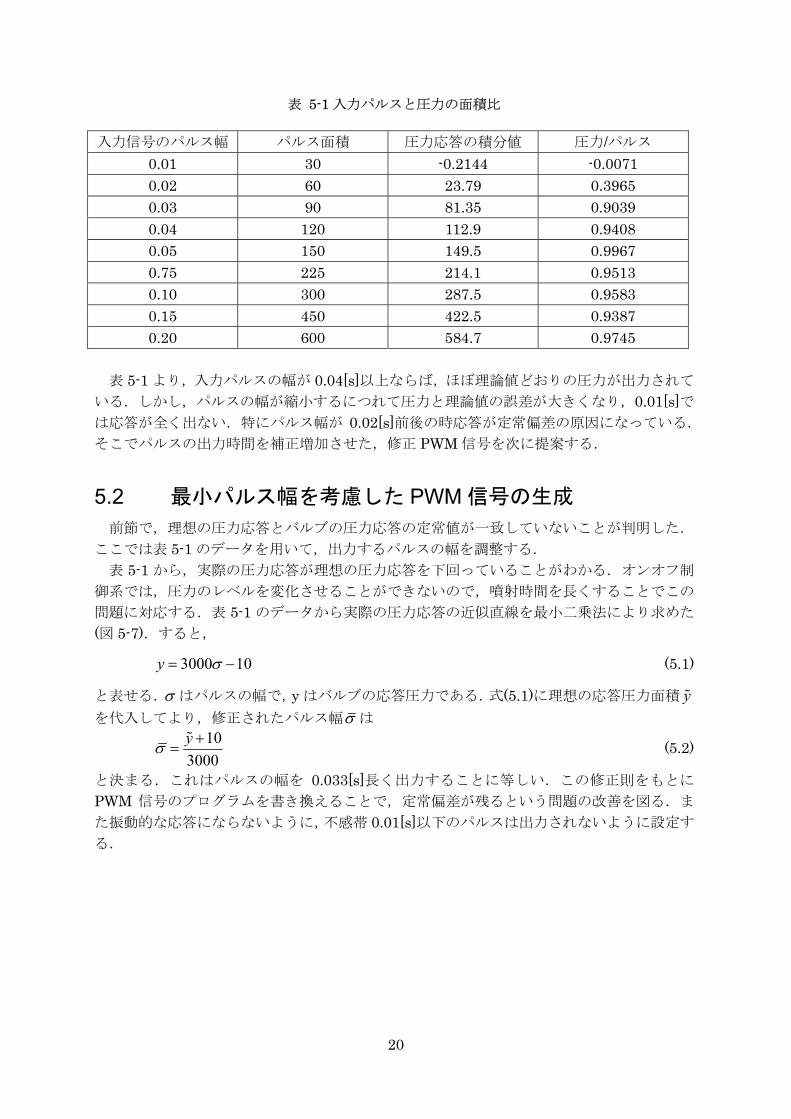
表 5-1 入力パルスと圧力の面積比
入力信号のパルス幅 パルス面積 圧力応答の積分値 圧力/パルス 0.01 30 -0.2144 -0.0071 0.02 60 23.79 0.3965 0.03 90 81.35 0.9039 0.04 120 112.9 0.9408 0.05 150 149.5 0.9967 0.75 225 214.1 0.9513 0.10 300 287.5 0.9583 0.15 450 422.5 0.9387 0.20 600 584.7 0.9745
表 5-1 より,入力パルスの幅が 0.04[s]以上ならば,ほぼ理論値どおりの圧力が出力されて
いる.しかし,パルスの幅が縮小するにつれて圧力と理論値の誤差が大きくなり,0.01[s]では応答が全く出ない.特にパルス幅が 0.02[s]前後の時応答が定常偏差の原因になっている.
そこでパルスの出力時間を補正増加させた,修正 PWM 信号を次に提案する.
5.2 最小パルス幅を考慮した PWM 信号の生成 前節で,理想の圧力応答とバルブの圧力応答の定常値が一致していないことが判明した.
ここでは表 5-1 のデータを用いて,出力するパルスの幅を調整する. 表 5-1 から,実際の圧力応答が理想の圧力応答を下回っていることがわかる.オンオフ制
御系では,圧力のレベルを変化させることができないので,噴射時間を長くすることでこの
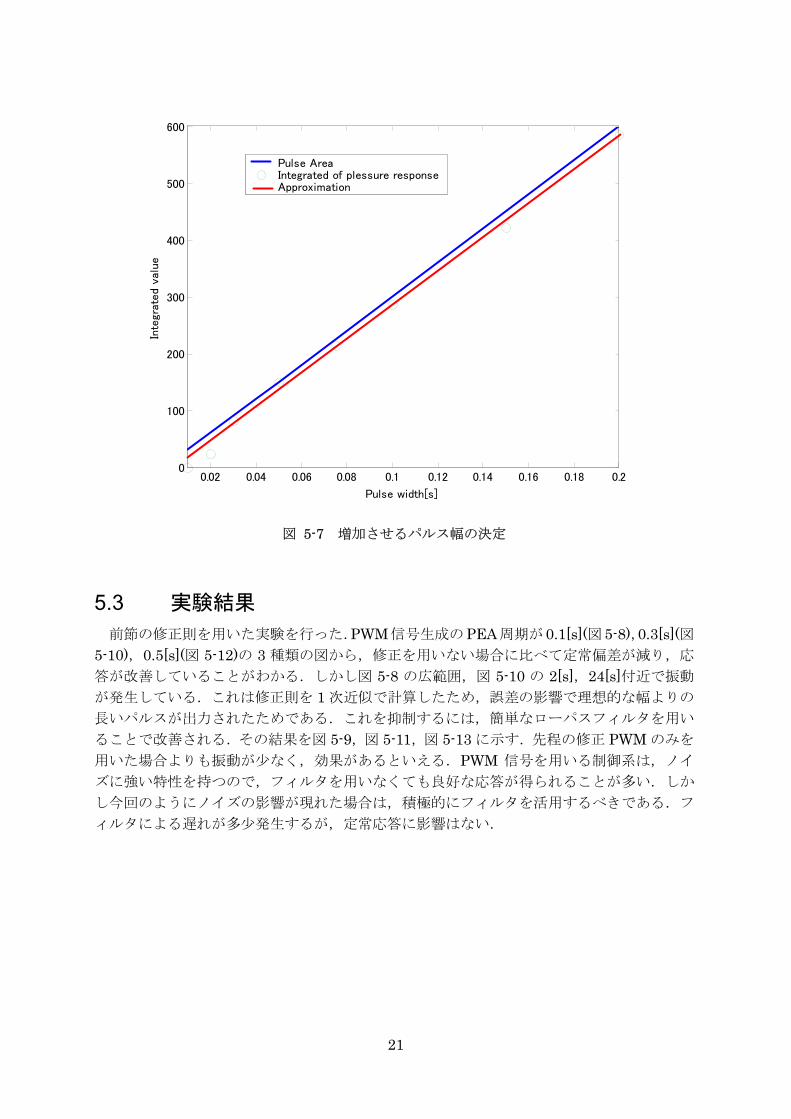
問題に対応する.表 5-1 のデータから実際の圧力応答の近似直線を 小二乗法により求めた
(図 5-7).すると,
3000 10y σ= − (5.1)
と表せる.σ はパルスの幅で,y はバルブの応答圧力である.式(5.1)に理想の応答圧力面積
を代入してより,修正されたパルス幅
yσ は
103000yσ +
= (5.2)
と決まる.これはパルスの幅を 0.033[s]長く出力することに等しい.この修正則をもとに
PWM 信号のプログラムを書き換えることで,定常偏差が残るという問題の改善を図る.ま
た振動的な応答にならないように,不感帯 0.01[s]以下のパルスは出力されないように設定す
る.
20
0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
100
200
300
400
500
600
Pulse width[s]
Inte
gra
ted
valu
ePulse AreaIntegrated of plessure responseApproximation
図 5-7 増加させるパルス幅の決定
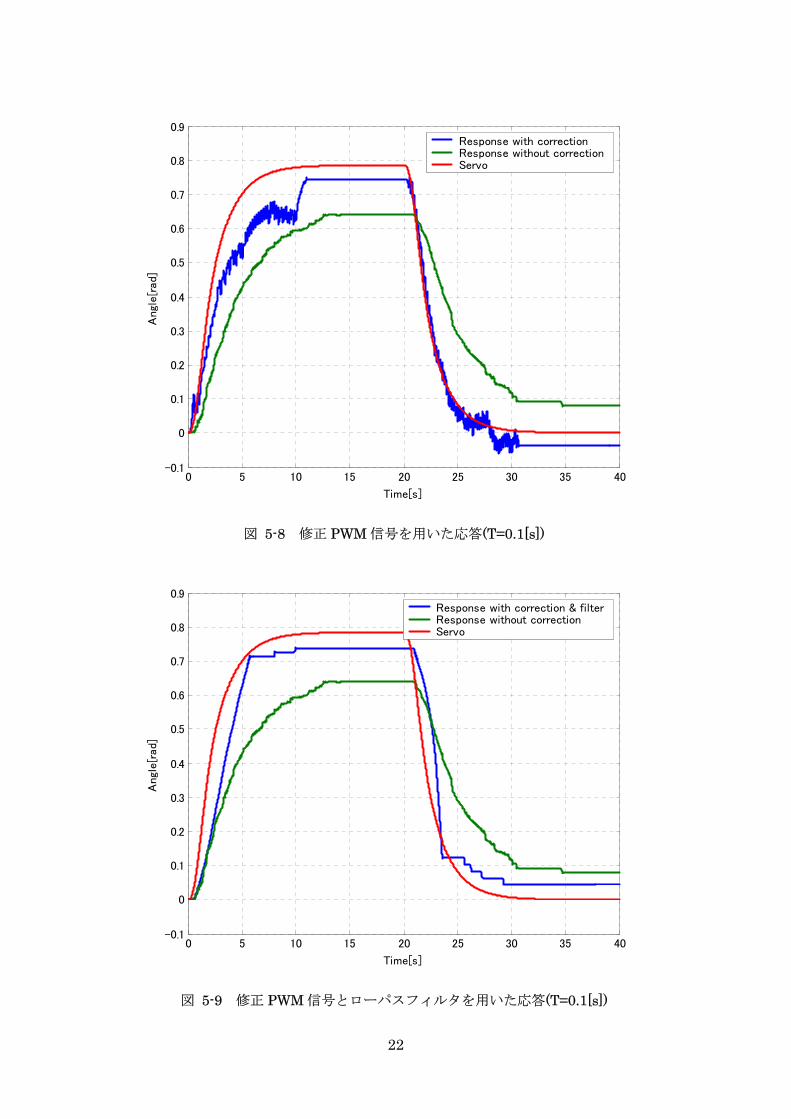
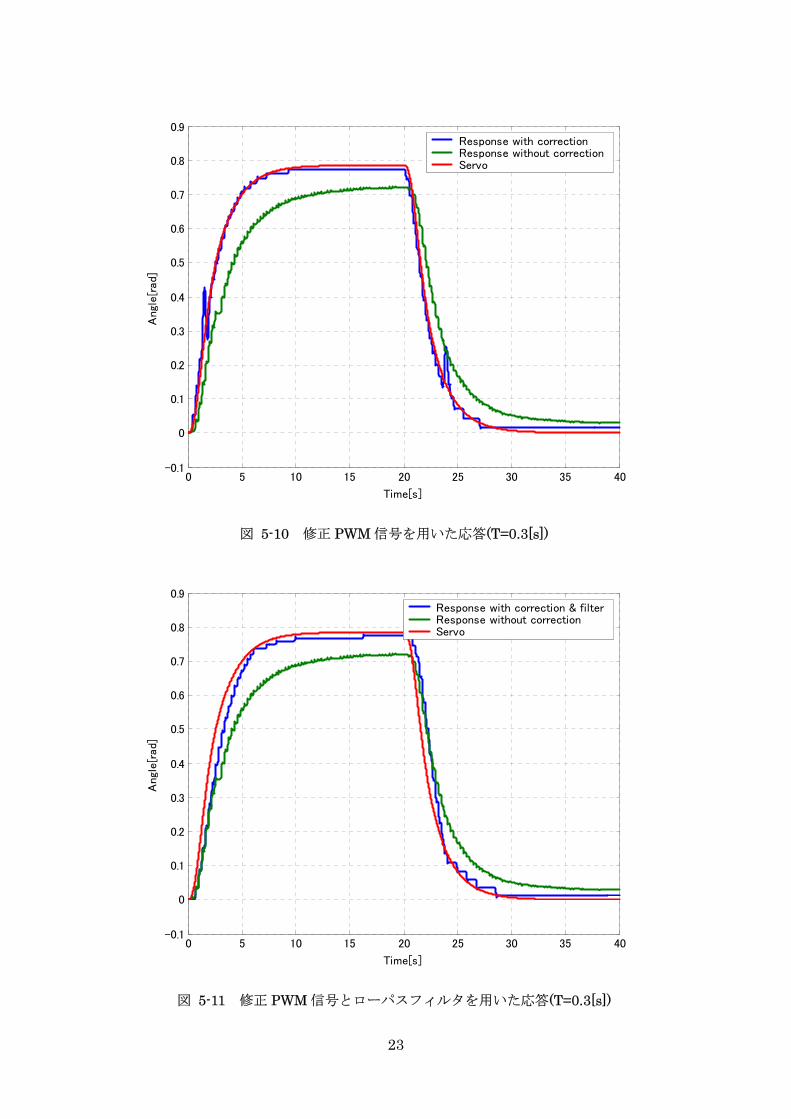
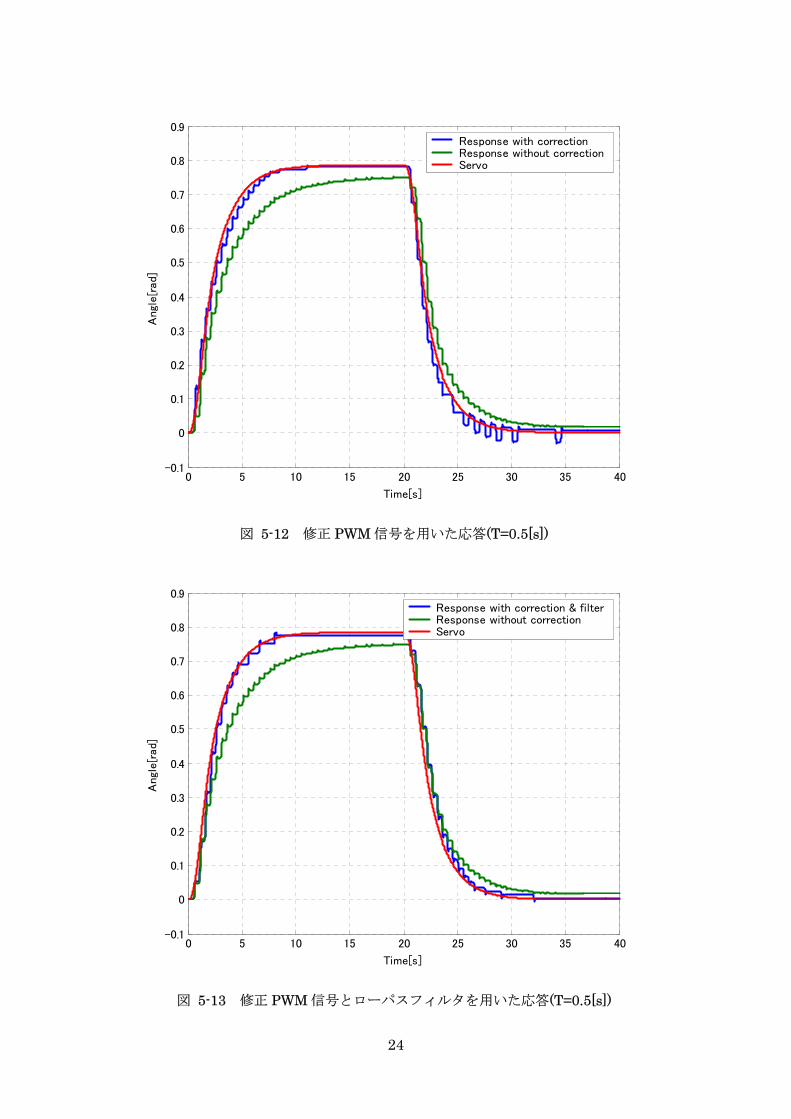
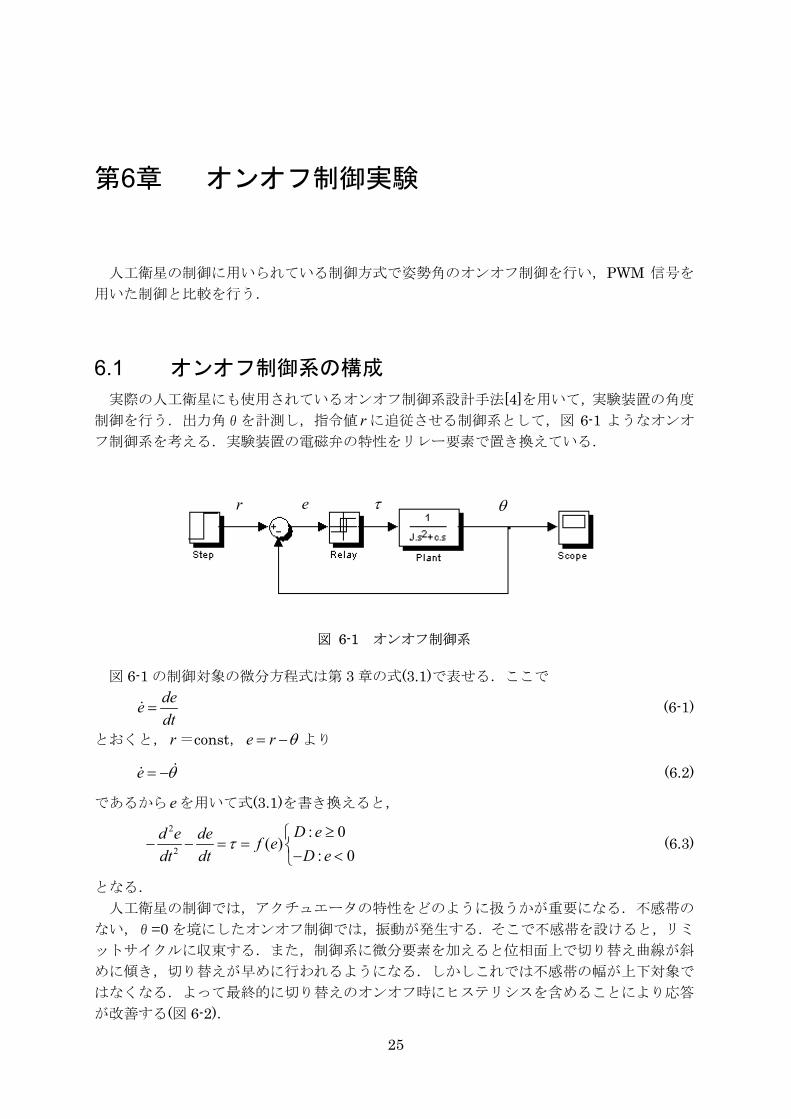
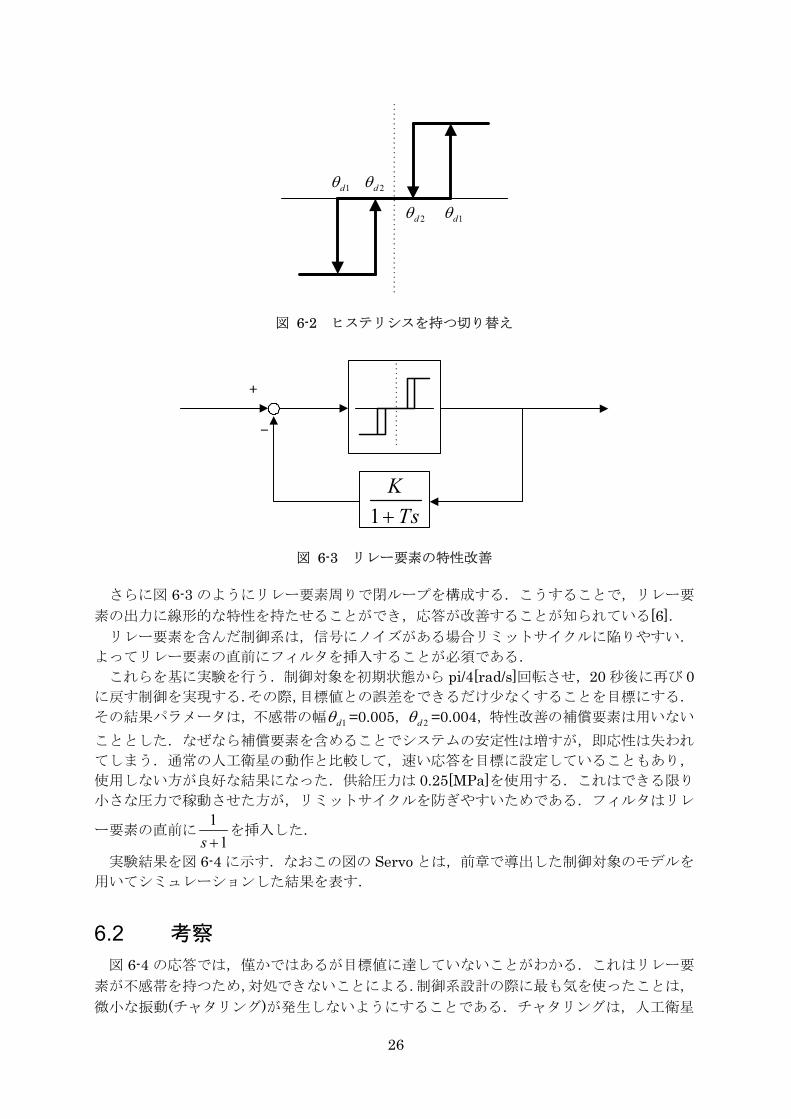
5.3 実験結果 前節の修正則を用いた実験を行った.PWM信号生成のPEA周期が 0.1[s](図 5-8),0.3[s](図
5-10),0.5[s](図 5-12)の 3 種類の図から,修正を用いない場合に比べて定常偏差が減り,応
答が改善していることがわかる.しかし図 5-8 の広範囲,図 5-10 の 2[s],24[s]付近で振動
が発生している.これは修正則を 1 次近似で計算したため,誤差の影響で理想的な幅よりの
長いパルスが出力されたためである.これを抑制するには,簡単なローパスフィルタを用い
ることで改善される.その結果を図 5-9,図 5-11,図 5-13 に示す.先程の修正 PWM のみを
用いた場合よりも振動が少なく,効果があるといえる.PWM 信号を用いる制御系は,ノイ
ズに強い特性を持つので,フィルタを用いなくても良好な応答が得られることが多い.しか
し今回のようにノイズの影響が現れた場合は,積極的にフィルタを活用するべきである.フ
ィルタによる遅れが多少発生するが,定常応答に影響はない.
21
0 5 10 15 20 25 30 35 40-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Time[s]
Angl
e[r
ad]
Response with correctionResponse without correctionServo
図 5-8 修正 PWM 信号を用いた応答(T=0.1[s])
0 5 10 15 20 25 30 35 40-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Time[s]
Angl
e[r
ad]
Response with correction & filterResponse without correctionServo
図 5-9 修正 PWM 信号とローパスフィルタを用いた応答(T=0.1[s])
22
0 5 10 15 20 25 30 35 40-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Time[s]
Angl
e[r
ad]
Response with correctionResponse without correctionServo
図 5-10 修正 PWM 信号を用いた応答(T=0.3[s])
0 5 10 15 20 25 30 35 40-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Time[s]
Angl
e[r
ad]
Response with correction & filterResponse without correctionServo
図 5-11 修正 PWM 信号とローパスフィルタを用いた応答(T=0.3[s])
23
0 5 10 15 20 25 30 35 40-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Time[s]
Angl
e[r
ad]
Response with correctionResponse without correctionServo
図 5-12 修正 PWM 信号を用いた応答(T=0.5[s])
0 5 10 15 20 25 30 35 40-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Time[s]
Angl
e[r
ad]
Response with correction & filterResponse without correctionServo
図 5-13 修正 PWM 信号とローパスフィルタを用いた応答(T=0.5[s])
24
第6章 オンオフ制御実験
人工衛星の制御に用いられている制御方式で姿勢角のオンオフ制御を行い,PWM 信号を
用いた制御と比較を行う.
6.1 オンオフ制御系の構成 実際の人工衛星にも使用されているオンオフ制御系設計手法[4]を用いて,実験装置の角度
制御を行う.出力角θを計測し,指令値 に追従させる制御系として,図 6-1 ようなオンオ
フ制御系を考える.実験装置の電磁弁の特性をリレー要素で置き換えている. r
r e τ θ
図 6-1 オンオフ制御系
図 6-1 の制御対象の微分方程式は第 3 章の式(3.1)で表せる.ここで deedt
= (6-1)
とおくと, =const,r e r θ= − より
e θ= − (6.2)
であるから を用いて式(3.1)を書き換えると, e2
2
: 0( )
: 0D ed e de f eD edt dt
τ≥
− − = = − < (6.3)
となる. 人工衛星の制御では,アクチュエータの特性をどのように扱うかが重要になる.不感帯の
ない,θ=0 を境にしたオンオフ制御では,振動が発生する.そこで不感帯を設けると,リミ
ットサイクルに収束する.また,制御系に微分要素を加えると位相面上で切り替え曲線が斜
めに傾き,切り替えが早めに行われるようになる.しかしこれでは不感帯の幅が上下対象で
はなくなる.よって 終的に切り替えのオンオフ時にヒステリシスを含めることにより応答
が改善する(図 6-2).
25
2dθ
1dθ2dθ
1dθ
図 6-2 ヒステリシスを持つ切り替え
1KTs+
+
-
図 6-3 リレー要素の特性改善
さらに図 6-3 のようにリレー要素周りで閉ループを構成する.こうすることで,リレー要
素の出力に線形的な特性を持たせることができ,応答が改善することが知られている[6]. リレー要素を含んだ制御系は,信号にノイズがある場合リミットサイクルに陥りやすい.
よってリレー要素の直前にフィルタを挿入することが必須である. これらを基に実験を行う.制御対象を初期状態から pi/4[rad/s]回転させ,20 秒後に再び 0
に戻す制御を実現する.その際,目標値との誤差をできるだけ少なくすることを目標にする.
その結果パラメータは,不感帯の幅 1dθ =0.005, 2dθ =0.004,特性改善の補償要素は用いない
こととした.なぜなら補償要素を含めることでシステムの安定性は増すが,即応性は失われ
てしまう.通常の人工衛星の動作と比較して,速い応答を目標に設定していることもあり,
使用しない方が良好な結果になった.供給圧力は 0.25[MPa]を使用する.これはできる限り
小さな圧力で稼動させた方が,リミットサイクルを防ぎやすいためである.フィルタはリレ
ー要素の直前に11s +を挿入した.
実験結果を図 6-4 に示す.なおこの図の Servo とは,前章で導出した制御対象のモデルを
用いてシミュレーションした結果を表す.
6.2 考察 図 6-4 の応答では,僅かではあるが目標値に達していないことがわかる.これはリレー要
素が不感帯を持つため,対処できないことによる.制御系設計の際に も気を使ったことは,
微小な振動(チャタリング)が発生しないようにすることである.チャタリングは,人工衛星
26
の悪影響を与え,燃料消費を増やすので効率の面から考えてもその発生を抑制するべきであ
る.不感帯を大きくすればチャタリングを抑えることが可能になるが,目標値までの誤差が
大きくなってしまう.逆に不感帯を小さくすれば,チャタリングが発生しやすくなる.よっ
て試行錯誤によって不感帯の幅を決定した.また,ヒステリシスの幅によって応答が大きく
変わるため,制御系設計には知識と経験が必要である.今回は簡単な制御系だが,多入力多
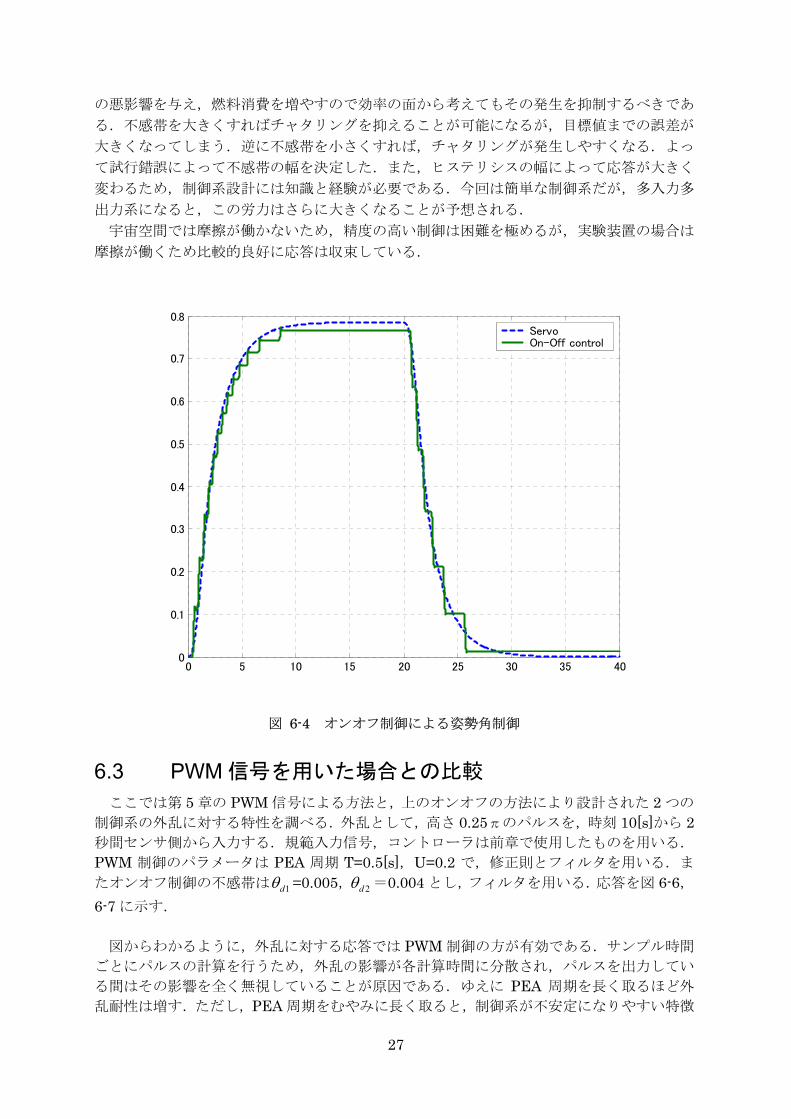
出力系になると,この労力はさらに大きくなることが予想される. 宇宙空間では摩擦が働かないため,精度の高い制御は困難を極めるが,実験装置の場合は
摩擦が働くため比較的良好に応答は収束している.
0 5 10 15 20 25 30 35 400
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8ServoOn-Off control
図 6-4 オンオフ制御による姿勢角制御
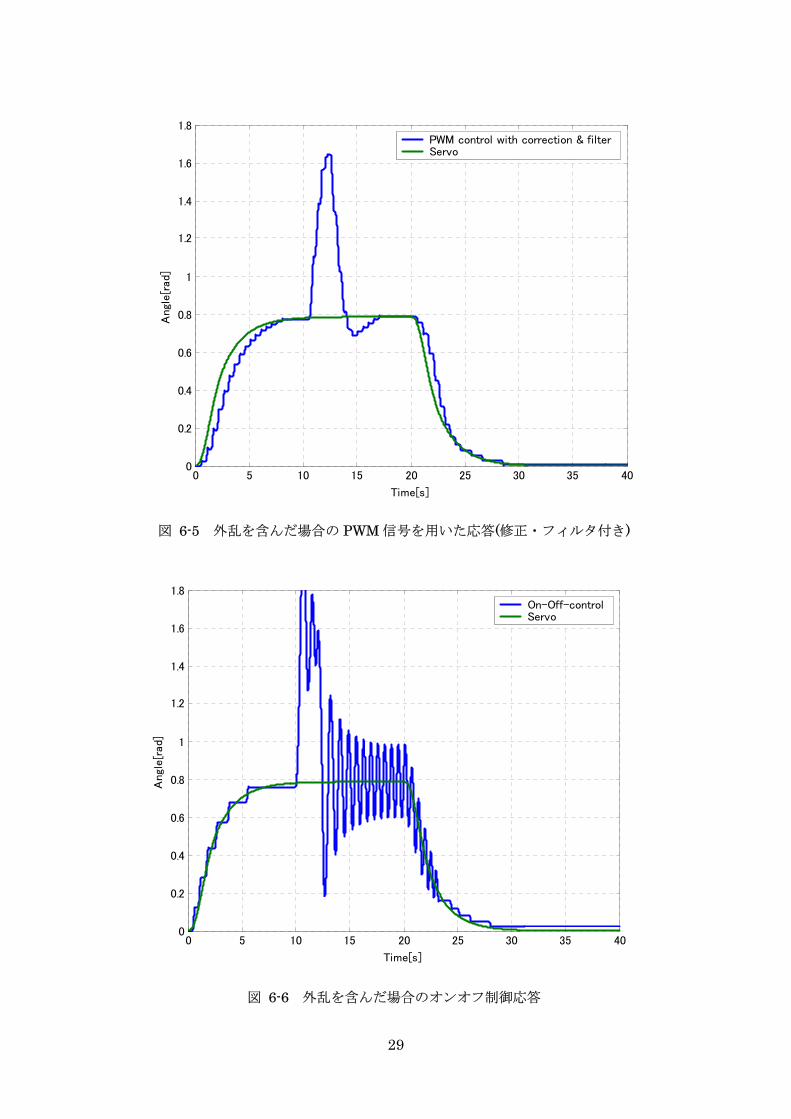
6.3 PWM 信号を用いた場合との比較 ここでは第 5 章の PWM 信号による方法と,上のオンオフの方法により設計された 2 つの
制御系の外乱に対する特性を調べる.外乱として,高さ 0.25πのパルスを,時刻 10[s]から 2秒間センサ側から入力する.規範入力信号,コントローラは前章で使用したものを用いる.
PWM 制御のパラメータは PEA 周期 T=0.5[s],U=0.2 で,修正則とフィルタを用いる.ま
たオンオフ制御の不感帯は 1dθ =0.005, 2dθ =0.004 とし,フィルタを用いる.応答を図 6-6,6-7 に示す.
図からわかるように,外乱に対する応答では PWM 制御の方が有効である.サンプル時間
ごとにパルスの計算を行うため,外乱の影響が各計算時間に分散され,パルスを出力してい
る間はその影響を全く無視していることが原因である.ゆえに PEA 周期を長く取るほど外
乱耐性は増す.ただし,PEA 周期をむやみに長く取ると,制御系が不安定になりやすい特徴
27

があるので注意しなければならない.また,今回用いた外乱が短い時間のパルスだったこと
も原因のひとつである.定常的な外乱が長い時間続けば,より多くの影響を受ける.またオ
ンオフ制御の外乱耐性は,PWM 制御と比べて強くないことがわかった.応答は激しく振動
し,PWM 制御時と比べて収束するまでの時間が長い.
28
0 5 10 15 20 25 30 35 400
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Time[s]
Angl
e[r
ad]
PWM control with correction & filterServo
図 6-5 外乱を含んだ場合の PWM 信号を用いた応答(修正・フィルタ付き)
0 5 10 15 20 25 30 35 400
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Time[s]
Angl
e[r
ad]
On-Off-controlServo
図 6-6 外乱を含んだ場合のオンオフ制御応答
29
これまで見てきたように,PWM 信号を用いて現在広く実用されているオンオフ制御と同
等或いはそれ以上の結果が得られるということがわかった.
応答の精度に関しては PWM 制御の方が優れている.オンオフ制御の場合チャタリングを
生じさせないようにするためには,不感帯の幅を大きくするしかなく,これに伴い定常偏差
は大きくなる.よって偏差をゼロにすることは難しく,±0.9[deg]程度が目安である.しか
し PWM 制御の場合,修正を用いない時には定常偏差が大きく残ったが,修正を加えること
で偏差を少なくすることが可能である.きめ細やかな制御を苦手とするオンオフアクチュエ
ータではあるが,PWM 制御を用いることで±0.2[deg]以内の誤差精度を保てることがわか
った. 設計に関しては PWM 制御の方がパラメータを直感的に理解しやすく,設計は簡単である.
オンオフ制御では設計の際に,リミットサイクルが起きないよう常に気を配る必要があり,
リミットサイクルが起きないようにすることと定常偏差をなくすことはトレードオフの関係
にあり,どちらも満足いく応答にはできない.これに対し PWM 制御では,線形の理論を用
いて制御系を設計することも可能なので,非常に扱いやすい.オンオフ制御の場合,例えば
周波数応答を比較するにしても記述関数や位相面解析を用いなければならず,非常に設計が
厄介である.特に多入力多出力系の設計の場合この差は大きい. 次に PWM 信号ではプラント入力にフィルタがなくとも,制御が可能であることがわかっ
た.今回微分器を制御に用いたため,プラント入力にノイズが加わり,オンオフ制御の場合
はフィルタなしの制御はチャタリングが生じるため実現不可能だった.しかし修正則を用い
た場合は,PWM 制御の場合もフィルタを必要としたため,一概にどちらが良いとは言えな
い. 後に外乱応答であるが,PWM 制御の方が優れている.実験で示したように,オンオフ
制御で周期の短い振動が発生するような場合も,PWM 制御では起きない.
30
第7章 結論 PWM 信号とオンオフ機構のアクチュエータを用いて,サーボ的な制御を実現することが
できた.なおその際にパルスごとの出力を調整することや, 小パルス幅を考慮した不感帯
をソフトウェア的に組み込むことは有効な手段である. 現場で用いられているオンオフ制御と比較した場合,同程度の姿勢角制御の精度を保ちな
がら,外乱耐性の面で特に優れている.その他の比較結果を表 7-1 に示す. 単入出力系ではオンオフ制御に比べて PWM 制御に格段の便利と性能向上が見られるわけ
ではないが,制御設計の手間を考えると多入出力系では PWM 制御の方が有効であると考え
られる.その実証は今後の課題である.また実際の人工衛星に制御対象の形を近づけ,振動
の影響を調べることや,オンオフ型アクチュエータをサーボ型アクチュエータの代わりに用
いることも検証していくべきである.特にサーボ型の動作をショベルカーに応用することで,
2 値制御ではない人間にとって扱いやすい操縦環境を開発できると考えられる.
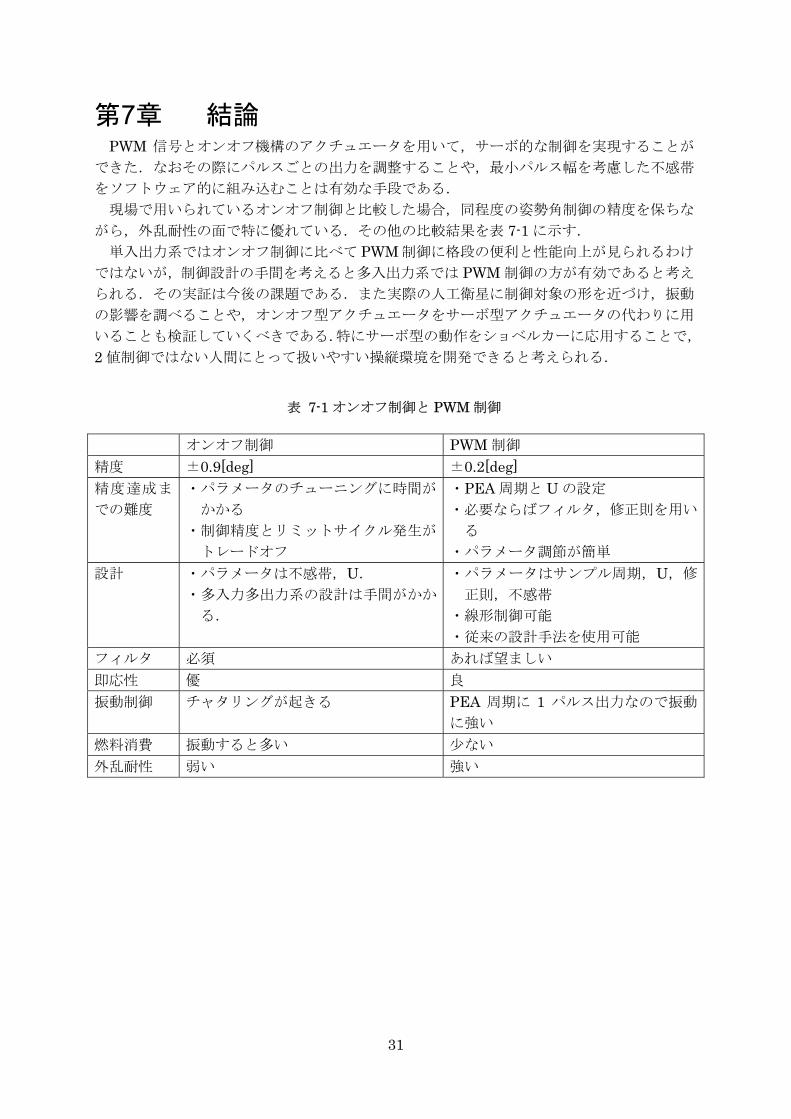
表 7-1 オンオフ制御と PWM 制御
オンオフ制御 PWM 制御 精度 ±0.9[deg] ±0.2[deg] 精度達成ま
での難度 ・パラメータのチューニングに時間が
かかる ・制御精度とリミットサイクル発生が
トレードオフ
・PEA 周期と U の設定 ・必要ならばフィルタ,修正則を用い
る ・パラメータ調節が簡単
設計 ・パラメータは不感帯,U. ・多入力多出力系の設計は手間がかか
る.
・パラメータはサンプル周期,U,修
正則,不感帯 ・線形制御可能 ・従来の設計手法を使用可能
フィルタ 必須 あれば望ましい 即応性 優 良 振動制御 チャタリングが起きる PEA 周期に 1 パルス出力なので振動
に強い 燃料消費 振動すると多い 少ない 外乱耐性 弱い 強い
31
謝辞
本研究を行うにあたり,3 年間熱心に指導して頂き,終始にわたり丁寧なご指導を賜りま
した筑波大学大学院システム情報工学研究科知能機能システム専攻 堀憲之 助教授に心より
深く感謝いたします. また折に触れ,有益な御助言を頂きました筑波大学大学院システム情報工学研究科知能機
能システム専攻 安信誠二 教授,筑波大学大学院システム情報工学研究科構造エネルギー工
学専攻 真島澄子 助教授,流体の項目でお世話になりました筑波大学大学院システム情報工
学研究科構造エネルギー工学専攻 松内一雄 教授に感謝致します. さらに研究に関する貴重な助言を数多く頂きましたシステム情報工学研究科の福澤昌俊君,
そして共に学び貴重な日々を過ごしてきたシステム情報工学研究科の亀井秀行君,瀬下勇君,
陳華軍君,理工学研究科のナジャンドシリンさん,工学システム学類の安藤司真君,樫村貴
士君,高橋良平君に心より感謝します. 後に学生生活を支えてくれた両親,家族,友人に深く感謝します.
32
参考文献 [1] R. E. Andeen, “The Principle of Equivalent Areas,” Trans. AIEE, Vol. 79, 1960, pp. 332-336. [2] T. Sakamoto, N. Hori, “New PWM Schemes based on the Principle of Equivalent Areas”, IEEE International Symposium on Industrial Electronics, pp. 505-510, L’Aquila, Italy, 2002. [3] SMC「Best pneumatics 1 空気圧用ソレノイドバルブ」第 4 版 [4] 茂原 正道「宇宙工学入門 衛星とロケットの誘導・制御」,培風館,1994 年 [5] 坂本 崇「プラント入力に注目した PWM 制御信号の生成」筑波大学修士論文,2002年度 [6] 宮崎 孔友「制御工学」,学献社,1979 年
33