公立はこだて未来大学 2012 年度システム情報科学...
TRANSCRIPT

公立はこだて未来大学 2012 年度 システム情報科学実習グループ報告書
Future University Hakodate 2012 System Information Science Practice
Group Report
プロジェクト名
生体情報の福祉利用~筋電義手の開発~
Project Name
Biological Information for Social Welfare ~Development of Myoelectric hand~
グループ名
筋電義手制御班
Group Name
Myoelectric hand control group
プロジェクト番号/Project No.
25-C
プロジェクトリーダ/Project Leader
1010093 佐々木啓孝 Hitotaka Sasaki
グループリーダ/Group Leader
1010185 樋山貴洋 Takahito Hiyama
グループメンバ/Group Member
1010093 佐々木啓孝 Hitotaka Sasaki
1010103 薬師寺尚也 Naoya Yakushiji
1010185 樋山貴洋 Takahito Hiyama
1010241 玉川佳奈 Kana Tamagawa
指導教員
櫻沢繁,中垣俊之
Advisor
Shigeru Sakurazawa Toshiyuki Nakagaki
提出日
2013年 1月 16日
Date of Submission
January 16, 2013

概要
本プロジェクトでは,表面電極を用いて筋電義手の開発を行った.その際,筋電位を計測す
る回路等を製作する生体信号計測班,計測された信号を識別して筋電義手を動かす筋電義手製
作班,筋電義手本体を製作する筋電義手製作班に分かれた.
前期では, 特定の動作を表現できる筋電義手の開発を目標とした. そこで, 前年度のプロジェ
クトで成功したグー, チョキ, パーの動作に加え、手首の伸展・屈曲動作を行う筋電義手の開発
を行った. 動作識別法は, 未学習のデータに対して高い識別率を持つサポートベクターマシン
を用いた. その結果, 目標であるグー・チョキ・パーの動作に加え, 手首の屈曲・伸展動作の識
別を成功させ, 筋電義手を動作させることができた. しかし, 動作識別の安定が課題となった.
後期では, 中間発表の成果物よりも動作の識別率を高くすることを目標とした. 動作の識別
率を高めることで, 安定した動作が可能となる. そのため, 操作者が自然にストレス無く筋電義
手を使用することができる. 安定した動作制御を行うには, 精密な力の制御による高い動作識
別は必須となる. そのため, 精密な力の制御に前期で行ったじゃんけんの動作を拡張させ, 物を
掴む, 摘む動作を行った. それに加え, 手首の伸展・屈曲動作の計4動作をサポートベクターマ
シンを用いて動作識別を行った. 物を把持する方法として, 圧力センサを筋電義手の指先に付
けそれを人間の触覚にあたる部分として使用した. また, ワイヤーの張力維持にひずみゲージ
を用いた. 結果として, 卵のような割れやすく力の制御が難しいとされるものを持ち上げるこ
とに成功したが, 前期同様に動作識別による安定性に課題が残った.
キーワード 動作識別, サポートベクターマシン,圧力センサ,ひずみゲージ, 物を持つ
(※文責: 佐々木啓孝)
- i -

Abstract
Abstract in English: In this project, we controled a electromyogram(EMG) hand usingsurface electrodes. Then, we were assigned to three groups. First group is measurementof biological signals group. This group makes electronic circuit that measure EMG.Second group is control of a myoelectric hand group. This group identify motion bymeasured myoelectric signals and supply instructions to myoelectric hand. Third groupis manufacture of a myoelectric hand group. This group make a main body of myoelec-tric hand. In first semester, we aimed to develop a myoelectric hand to perform accurate move-ments. So, we identified motion of ”stone-scissor-paper” and ”flection and extensionof wrist” by EMG. The motion of ”stone-scissor-paper” was successful on project ofprevious financial year. Also, we used support vector machine to identify motion. Thesupport vector machine has high recognition rate in regard to new data. As a result,we could identify motion of ”stone-scissor-paper” and ”flection and extension of wrist”by EMG. However, this motion identification was less than perfect. In second semester, we aimed to develop the myoelectric hand that has a higher mo-tion recognition rate than the first semester’s one. If it is possible to identify accuratemotion, myoelectric hand could perform stability motion. Therefore, when a patientuse myoelectric hand, they feel less stress. To control stability motion, it is necessaryto high motion identification by accurate force control. Thus, we extended movementsof ”stone-scissor-paper”, and we controled myoelectric hand motion of ”flection andextension of wrist”. Myoelectric hand motion of ”flection and extension of wrist” wascontroled by pressure sensor and strain gauge. Pressure sensor which was placed on tipof finger was used as tactile sense and strain gauge was used to keep wire tension. Asa result, myoelectric hand could bring up breakable like a egg. However, this motionidentification was less than perfect.
Keyword motion identification, Support vector machine, pressure sensor, twist sen-sor, to catch the objective
(※文責: 佐々木啓孝)
- ii -

目次
第 1章 はじめに 1
1.1 背景 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 筋電義手の現状と従来例 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.3 現状による問題点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.4 問題点の解決方法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.5 表面筋電位法による動作識別 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.6 動作識別の課題 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.7 動作識別について . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
第 2章 到達目標 4
2.1 本プロジェクトの目的 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 筋電義手制御班の目的 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.3 通常の授業ではなく, プロジェクト学習で行う利点 . . . . . . . . . . . . . . . . . 4
2.4 課題設定 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.4.1 具体的な方法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.4.2 課題の割り当て . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.4.3 全体のスケジュール . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.4.4 筋電義手制御班のスケジュール . . . . . . . . . . . . . . . . . . . . . . . . 7
2.4.5 筋電義手制御班佐々木啓孝のスケジュール . . . . . . . . . . . . . . . . . . 8
2.4.6 筋電義手制御班樋山貴洋のスケジュール . . . . . . . . . . . . . . . . . . . 9
2.4.7 筋電義手制御班薬師寺尚也のスケジュール . . . . . . . . . . . . . . . . . . 9
2.4.8 筋電義手制御班玉川佳奈のスケジュール . . . . . . . . . . . . . . . . . . . 10
2.5 中間発表時における課題と解決策 . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.5.1 成果物の概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.5.2 課題 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.5.3 解決案 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.6 最終発表の取り組み . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.6.1 目標 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.6.2 取り組み . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
第 3章 筋電義手制御班課題解決過程の詳細 14
3.1 概要 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2 信号計測部 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2.1 動作と筋肉の関係 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2.2 中間発表で識別に用いた筋肉 . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2.3 最終発表で識別に用いた筋肉 . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.2.4 電極の位置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2.5 計測点を増やすことによる不安な点について . . . . . . . . . . . . . . . . . 19
- iii -

3.2.6 不安な点の解決策と結果について . . . . . . . . . . . . . . . . . . . . . . . 20
3.3 信号処理部 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.3.1 制御の問題点 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.3.2 サポートベクターマシン (SVM)について . . . . . . . . . . . . . . . . . . 21
3.3.3 マイコンについて . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.3.4 学習のしくみ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.3.5 指の動作構造 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.3.6 力の制御について . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.3.7 物を掴む, 摘む方法について . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.4 計測用電極付きサポーター . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.4.1 ボタン付き電極 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.4.2 サポーターの設計・製作 . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.5 ポスター制作 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.5.1 メインポスター . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.5.2 筋電義手制御班のサブポスター . . . . . . . . . . . . . . . . . . . . . . . . 31
3.6 スライド制作 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.6.1 概要・事前知識のスライド . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.6.2 筋電義手制御班のスライド . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.6.3 動画撮影 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
第 4章 結果 40
4.1 プロジェクトの結果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.2 成果の評価 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.3 担当分担課題の評価 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.3.1 プロジェクト全体 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.3.2 筋電義手制御班 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.3.3 佐々木啓孝 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.3.4 樋山貴洋 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.3.5 薬師寺尚也 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.3.6 玉川佳奈 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
第 5章 今後の課題と展望 45
参考文献 46
- iv -

Biological Information for Social Welfare ~Development of Myoelectric hand~
第 1 章 はじめに
1.1 背景
筋電義手は, 人間が腕を動かそうとする際に筋肉から発生する筋電位を用いて動作する義手のこ
とである. 不慮の事故や生まれつき腕の無い人にとっては腕の代わりに自由に動かせる筋電義手は
非常に有効である. しかし, 現在普及している義手の多くは高価で重量があり, 侵襲式の計測で筋電
位を検出するため, 体を傷つけるなど多くの問題を抱えている.
(※文責: 佐々木啓孝)
1.2 筋電義手の現状と従来例
現在普及している筋電義手の多くは侵襲的計測方法が用いられている. この方法は, 電極を外科
的な手術により身体に埋め込む方法や針電極を直接筋肉に刺すことで筋電位を計測している. 電極
を体に直接埋め込むことは筋活動を正確かつ安定して計測することが可能である. そのため, この
方法は筋電義手の精密な制御が可能である. シカゴ・リハビリテーション研究所で開発されたバイ
オニック・アームは, 筋肉からの電気信号を計測し, それを動作識別に利用している [1]. 2004年に
バイオニック・アームを取り付けるための手術を受けた女性は, 現在洗濯物をたたんだり, ビンの
蓋を開けたり, 野菜を切ったり不自由無く日常生活を送れるようになった. この女性が利用してい
るバイオニックアームは, 脳に繋がる腕の神経を利用して機能する. 腕の神経は, 肩で切断されて
も, 一部は機能しており, 脳に繋がっている. それら機能している神経を外科手術によって胸の筋肉
の神経組織へ繋ぐ. 神経を繋がれた胸の筋肉は, 脳から発信された電気信号によって収縮するため,
装着者の「意志」をより反映させる効果がある. この筋肉の収縮を, 皮膚の上に付けられた電極が
読み取り, コンピューターが解析して義肢が動く仕組みになっている.
(※文責: 佐々木啓孝)
1.3 現状による問題点
上述のバイオニックアームは我々の生活にとって役立つものであるが, バイオニックアームなど
の筋電義手は現状で多くの問題を抱えている.
一つ目として, 価格の問題である. 筋電義手はモータや制御用のデバイスなど様々パーツで構成
されている. それらを体に装着することにより動作させることができるが, パーツ一つ一つは高価
である. 現在, 普及している多くの筋電義手は 100 万円以上するものが多い. touchbionics 社の
i-limbという筋電義手は 500万円以上し, メンテナンスや部品修理も合わせて考えると広く普及す
ることは難しい [2]. また, 筋電義手は日本での普及が世界に比べとても少ない. 医療崩壊が進んで
いる言われている国々でも, 国からの補助が充実している日本より遥かに筋電義手の普及が進んで
いる. 例えば, イギリスでは, 小児で手を切断した場合, 幼少期から筋電義手を使用する割合は全体
の 70%をしめている. また, カナダでは, 筋電義手を装着するシステムと訓練システムが確立され
Group Report of 2012 SISP - 1 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
ており, 自宅での装着や, 訓練も可能である. また, 通院による経済的負担の軽減や, 年齢に合った
筋電義手の使用法も進められている.
二つ目の問題は, 安全性の問題である. バイオニックアームのような筋電義手は侵襲的計測方法
で筋電位を計測している. 侵襲的計測方法の場合, 外科的な手術を施し, 電極を筋肉の神経内に埋め
込み体を傷つけるため, 感染症にかかる可能性がある. また, 一度失った腕にさらに手術を施すため
患者の精神的な苦痛も大きい.
三つ目の問題は, 筋電義手の総重量が重い問題である. 幼少時の子供には筋電義手を付けた生活
は難しい. それは, サーボモータ一つの重量でも 80~200グラムと重量が大きく, 全体の筋電義手
の総重量もそれに応じて大きくなるからである. Ottobock社では小児用の筋電ハンドを開発して
いるが, 日本ではあまり普及していない. それは, 筋電義手に対しての医療制度が調っていない日本
では, 小児が義手を使用することが困難なためである.
(※文責: 佐々木啓孝)
1.4 問題点の解決方法
1.3章で述べた筋電義手の問題点から本プロジェクトでは筋電義手を安価で設計・開発すること,
被験者の負担がかからない表面筋電位を用いること, 金属類を使わず, 総重量を軽くすることの3
つを解決策とした.
(※文責: 佐々木啓孝)
1.5 表面筋電位法による動作識別
被験者の負担がかからない計測として, 表面筋電位を用いる. しかし, 表面筋電図法による動作識
別は困難である. それは, 腕の筋肉は身体の深部まで絡み合っており, それぞれの筋は複雑に制御さ
れている. そのため, 一つの動作を行う時に複数の筋活動が同時に起こる. 最も日本で普及してい
る OttoBock社の筋電義手は, 主に手関節 (手首)屈筋群と手関節伸筋群から得られる筋電位を制御
信号として手先の開閉を行うものである.
その一方で, 指の開閉よりもさらに多くの動作を実行可能な多自由度筋電義手の実現が期待され
ている. これを実現するために, 手の複数の動作意図を筋電位から取り出す手法が研究されてきた.
特に, 複数の筋で観測した筋電位から抽出される筋電位のパターンと動作意図との関係を識別器に
より学習し, 動作意図を推定する手法 (以下, 動作識別法)が多数提案されている.
これらの研究の多くが, 健常者を対象に識別器を用いた動作識別法の有効性を報告している [3].
しかし, 前腕切断がもたらす特殊な状況があり, 前腕切断者に対しても動作識別法が同様に有効で
あるかは明らかではない. 例えば, 健常者は手を動かすことで筋電位を発生させるのに対し, 前腕切
断者は切断した手が存在するかのような感覚である幻肢を動かし, この際の筋収縮で生じる筋電位
を利用することが一般的である. 幻肢には運動感覚はあるが, 視覚的なフィードバックはない. ま
た, 幻肢の位置や長さが切断前の感覚と異なり, 自由に動かせない場合もある. このような場合に
は, 切断前の動作イメージを手がかりに筋収縮を行う必要がある. さらに, 切断そのものや切断端の
処置が原因で筋の位置が切断前と異なる場合や, 切断したことで前腕の筋力が低下し, 思い通りに
筋収縮が出来ない場合もある.
Group Report of 2012 SISP - 2 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
(※文責: 佐々木啓孝)
1.6 動作識別の課題
前腕切断者を対象に識別器を用いた動作識別法の有効性を検証している研究 [3]において, 次の
ような課題がある.
筋電位に基づいて動作識別を行う訓練を受けていない前腕切断者について,精度よく動作識別を
行えるかどうかよくわかっていない.現在普及している手先の開閉動作のみ行う筋電義手は,使い
こなせるまでに長期の訓練を要する.筋電位パターンには筋の位置や量,組織の電気的特性や断端
の状態などの違いによる個人的特徴と,同じ動作を行う場合でも筋の活動パターンが少しずつ異な
ることによる個人内変動がある.識別器を用いた動作識別法を筋電義手の操作に適用する理由の一
つは,このような個人的特徴を学習し,筋電義手の習得にかかる前腕切断者側の負担を軽減するこ
とである.このため,初めて筋電位の制御を経験する訓練初期の段階においても,動作識別法によ
り筋電義手をある程度操作できることが望ましい.これは筋電義手の使用を諦めずに訓練を継続す
るためのモチベーションとしても重要である.
以上の課題を踏まえ, 本プロジェクトの動作識別は幅広い属性の被験者群について動作識別を行
えるようにした.
(※文責: 樋山貴洋)
1.7 動作識別について
現在, 動作識別に用いている方法は k-最近傍法(k-NN),ベイズ決定則(BDR),ニューラルネッ
トワーク(MLP),サポートベクターマシン(SVM)などがある.k-NNは実装が極めて容易なた
め,パターン認識では比較のためのベースラインとして用いられる識別器である.BDRは超パラ
メータの設定が不要なパラメトリックな線形識別器である. MLP は 1990 年代以降に動作識別に
多用されるようになった,非線形写像を学習可能な識別器である.SVMは識別器の中では後発の
識別器であり,MLPのような局所最適解の問題がなく,マージン最大化基準により汎化能力を高
める工夫が施されている.
本プロジェクトでは, 表面筋電位の動作識別の研究において識別率が最も高いとされるサポート
ベクターマシン(SVM)を用いた.
(※文責: 樋山貴洋)
Group Report of 2012 SISP - 3 - Group Number 25-C
Biological Information for Social Welfare ~Development of Myoelectric hand~
第 2 章 到達目標
2.1 本プロジェクトの目的
第 1章で示した筋電義手の問題点から, 本プロジェクトは筋電義手の総重量が重い点, 筋電義手
の価格が他の種類の義手に比べ高価な点, 筋電義手の操作に用いる計測法が体を傷つける点, 以上
の 3つを解消し, 筋電義手の普及に役立てることを目的としている.
これらの問題点の解消方法について順に述べていくと, 重量の問題は軽量化を図れる材質・構造
を選定することで可能となる. 具体的には, 重量のある金属を使わず, プラスチックやラテックスを
用いる事である.
義手の価格の問題は, モーターやマイコン, 回路基盤等で用いる部品以外はほぼ自分たちで組み
立て, 現在売られている数百万単位での筋電義手の十分の一以下で開発を行う事で解消できる.
計測の際, 体を傷付けてしまう問題は, 導電布とオペアンプと銀板を組み合わせたアクティブ電
極により, 皮膚表面上で筋電位を計測する手法を用いることで解消できる. これにより, 侵襲的計測
方法である針電極などで体に傷を付けたり, 外科的な手術を施す埋め込み電極を用いないため安全
が守られると考えられる.
(※文責: 佐々木啓孝)
2.2 筋電義手制御班の目的
2.1章より, 本プロジェクトでは, 体を傷つけずに筋電位を計測する表面筋電図法を用いる. しか
し, 腕の筋肉は身体の深部まで絡み合っており, それぞれの筋は複雑に制御されている. そのため,
一つの動作を行う時に複数の筋活動が同時に起こり, 表面筋電位を用いて腕の動作を識別すること
は困難である. また, 筋電義手は使いこなせるまで長期の訓練を要し, 筋電位パターンは筋の位置や
量,組織の電気的特性や断端の状態などの違いによる個人的特徴と,同じ動作を行う場合でも筋の
活動パターンが少しずつ異なることによる個人内変動がある.
したがって, 筋電義手制御班は, 幅広い属性の被験者を対象に複雑な動作を可能とする制御を目
的とした. これは, 初めて筋電義手の制御を経験する訓練の初期段階でも, ある程度操作できること
で筋電義手の使用を諦めずに継続するためのモチベーションとしても重要である. また, 私たちの
日常生活において物を把持する動作など複雑な動作を行うことが多い. そのため, これらの動作を
可能にすることで前腕切断者の身体的負担を軽減できると考える.
(※文責: 樋山貴洋)
2.3 通常の授業ではなく, プロジェクト学習で行う利点
複数のメンバーで一つの問題を解決することにより, プロジェクト遂行に伴うルールや技術を学
ぶことができる. 本プロジェクトの「筋電義手の開発」では, 学内の講義では学ぶことができない
専門的な回路の知識や最先端の信号処理技術など各グループが教員の協力や学外の論文を読むこと
Group Report of 2012 SISP - 4 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
で問題解決を図る. 問題提起や問題解決までのプロセスを一貫して学生が主体的に取り組むことに
より, 学生自ら, 実体験を通じたプロジェクト遂行に必要なノウハウや技術を学ぶことができる. ま
た, 学内の定期的な発表や学外との協力により, 第三者に伝える能力を得ることができる.
(※文責: 佐々木啓孝)
2.4 課題設定
2.4.1 具体的な方法
以下のような方法を設定した.
1. 今後の方針についての会議
課題:本プロジェクトで,何を行うかを決めた.
解決策:決め方は,紙にやりたいことを書き,投票形式で行った.
2. 筋電義手の市場調査
課題:現在の義手の問題点や解決策の調査を行った.
解決策:本やインターネット,論文を読んだ.
3. 基礎知識の学習
課題:今後,どの班に分かれるかを決めるための,基礎知識を養った.また,どの班に分か
れても, 必要となる知識を養った.
解決策:プロジェクトの担当教員が講義を実施した.
4. 班を 3 つに分けて専門知識の習得
課題:基礎知識の学習で得た知識より専門的な知識を習得した.
解決策:前年度のプロジェクトメンバーに指導してもらった.
・生体信号計測班
課題:生体信号を計測する回路を作る際に必要な知識を習得した.
・筋電義手制御班
課題:筋電義手を制御する際のモータなどを制御するプログラムの基礎の習得した.
・筋電義手製作班
課題:筋電義手を製作する際の,工具などの操作方法や設計について習得した.
5. 班ごとにわかれ活動
・生体信号計測班
課題:筋電義手操作に必要な生体信号を計測するための回路の製作した.また,センサー用
の回路の製作した.
・筋電義手制御班
課題:生体信号を識別し,義手を正しく制御した.
・筋電義手製作班
課題:筋電義手本体の製作した.
6. 他班との情報共有
課題:他班との情報共有が為されていないことがあった.
解決策:プロジェクトリーダが各班を見回って,各班の調整を行った.
(※文責: 佐々木啓孝)
Group Report of 2012 SISP - 5 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
2.4.2 課題の割り当て
各人の立候補により以下のように割り当てた.
・生体情報計測班
坂本 勝成
野呂 健人
岸本 弘太
五十嵐 彩乃
・筋電義手制御班
樋山 貴洋
玉川 佳奈
佐々木 啓孝
薬師寺 尚也
・筋電義手製作班
丸尾 和生
田中 圭
平賀 大雪
菊地 浩倖
瀬川 龍司
全体のスケジュールとして主に各グループに分かれた活動が主となる.
(※文責: 佐々木啓孝)
2.4.3 全体のスケジュール
5月 プロジェクトで何を行うかの決定
前期プロジェクトの計画を立てる
基本知識の習得(担当教員による講義)
前年度にプロジェクトメンバーからの知識の継承
6月 各班に分かれて活動
必要な知識の収集
中間発表スライド作成
中間発表ポスター作成
7月 発表練習
スライドの訂正
ポスターの訂正
中間発表会
中間報告書の執筆
後期プロジェクトの計画をたてる
8月 夏期休暇
9月 筋電義手製作班の人員が少ないためサポートに入る
Group Report of 2012 SISP - 6 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
腕の型とり
10月 プラスチック加工
モータ固定方法の話し合い,作製
プラスチックの型とり
生体信号計測班の人員が少ないためサポートに入る
電極作り
11月 プラスチックの加工
組み立て方法の話し合い
スライドの作成
最終報告書の執筆
発表練習
スライドの訂正
12月 発表練習
スライド訂正
最終発表会
最終報告書の執筆
個人報告書の執筆
プロジェクト報告書の執筆
(※文責: 佐々木啓孝)
2.4.4 筋電義手制御班のスケジュール
5月 プログラムを行う環境を各人の PCに用意・プログラムの知識を習得する
モーター制御と筋電位での動作識別(サポートベクターマシン, ニューラルネットワークな
ど)の知識を習得する
6月 筋電制御班の各役割を決める(プログラム設計・コーディングなどの信号識別部, 腕の筋肉
の選定などの信号計測部, ポスター・スライド製作部 )
プログラムの設計・コーディング・スライドおよびポスターの作成
動作識別における主要な 5箇所の筋肉を筋電位計測実験によって選定
7月 発表に向けてスライド作り・ポスター製作と筋電義手の実装・実演動画の撮影
8月 札幌オープンキャンパスで筋電義手動作実演
9月 中間発表時での課題とスケジュールの決定
各人の仕事内容の確認(中間発表の仕事から新たにサポーター電極製作が加わる)
10月 プログラムの設計・コーディング・スライドおよびポスターの作成
動作識別における主要な 16箇所の筋肉を筋電位計測実験によって選定
11月 発表に向けてスライド作り・ポスター製作と筋電義手の実装・実演動画の撮影
12月 最終報告書の作成
各人が自分の仕事に責任を持って作業を行えるようにするため, それぞれ役割を与えた. 主にプ
ログラム設計に向けた勉強とコーディング, 動作識別を行う上で計測対象とする筋肉の選定, ポス
ター・スライド作成におけるイラストソフトの勉強が中心となった. 筋電義手制御班には本プロ
ジェクトのグループリーダーも在籍しているが, 主に全体のスケジュール管理などグループ全体の
Group Report of 2012 SISP - 7 - Group Number 25-C
Biological Information for Social Welfare ~Development of Myoelectric hand~
スケジュール把握などの仕事を行っていたため, 筋電義手制御班の個別の仕事は与えてなかった.
(※文責: 樋山貴洋)
2.4.5 筋電義手制御班佐々木啓孝のスケジュール
5月 プログラミングを行う環境を PC上に用意し
プログラムの知識を習得する
6月 筋電位の生理学的な知識を身につける
筋電義手製作班で構造について話し会う
筋電義手製作班でアルミの加工を手伝う
7月 発表に向けてのポスターの作成
発表に向けてのスライドの作成
発表に向けての筋電義手の調整
スライドの修正
ポスターの修正
発表練習
中間発表会
中間報告書の作成
8月 夏期休暇
9月 最終発表に向けての目標とスケジュールの決定
筋電義手製作班の構造についての話し合いに参加
10月 筋電義手製作班でゴム製の手袋作製
必要な材料の下見
筋電義手製作班で手の形の石膏をとる
筋電義手製作班で手の形にプラスチックを成型
生体信号計測班で電極のはんだ付け
生体信号計測班でショート防止用のボンド付け
筋電義手製作班でプラスチックの手を切断
筋電義手製作班でプラスチックをヤスリがけ
筋電義手製作班でモータとワイヤの接合
発表に向けてのポスター制作
11月 発表に向けてのスライドの制作
発表に向けての筋電義手の調整
スライドの修正
発表練習
12月 発表練習
スライドの修正
最終発表会
個人報告書の作成
グループ報告書の作成
プロジェクト報告書の作成
個人報告書の修正
Group Report of 2012 SISP - 8 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
グループ報告書の修正
プロジェクト報告書の修正
1月 個人報告書の修正
グループ報告書の修正
プロジェクト報告書の修正
プロジェクトリーダーとして自分の作業だけに没頭せずに, 周りの状況に従って仕事の振り分け
を行った. また, 各班のスケジュールの管理など進捗状況をメンバーに伝えることを行った.
(※文責: 佐々木啓孝)
2.4.6 筋電義手制御班樋山貴洋のスケジュール
5月 プログラミングを行う環境を PC上に用意し, プログラムの知識を習得する
腕の動作識別の論文を読む
6月 去年のサポートベクターマシンによる動作識別用のプログラムの解読
腕の屈曲・伸展の計 2動作の識別用のプログラム作成と実験
7月 筋電義手の動作実装・動画の撮影
発表練習
8月 札幌オープンキャンパスで筋電義手動作実演
中間発表での用いたプログラムの見直し
9月 中間発表の反省とプログラムの見直し
腕の動作識別の論文を読む
フォトカプラ回路の作成
10月 物を掴む・摘む, 手首の伸展・屈曲動作識別のプログラム作成
圧力センサ, ひずみゲージの回路の設計
11月 スライド作成
筋電義手の動作実装・動画撮影
発表練習
12月 最終報告書の作成
主に筋電義手の動作識別用のプログラムの作成と回路班で作成するひずみゲージ, フォトカプラ,
圧力センサの回路を設計を行った.
(※文責: 樋山貴洋)
2.4.7 筋電義手制御班薬師寺尚也のスケジュール
5月 プログラミングを行う環境を PC上に用意し, プログラムの知識を習得する
最初はMPLABと PICを利用できる環境を用意して,利用方法を学ぶ
割り込みやサーボモーターについての学習を行う
MPLABと PICのプログラミングについて学習し,また去年までの成果物である筋電義手
を動かす
6月 プログラムの設計と筋電義手制御班内での作業の振り分けを行う
Group Report of 2012 SISP - 9 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
MPLABと PICでは制御が困難であると判断し,Arduinoで制御を行うことにする
Arduino のプログラミングについて学習し,Arduino を使ってサーボモーターの動作を確
認する
サーボモーターの PWM制御値を可変抵抗によって変化させ,Processingでその可変抵抗
の値を出力する
表面筋電位の計測結果を学習させるプログラムの作成する
電極を貼り付ける筋肉の位置を調べ,最も良い位置を特定する
筋電義手計測班が作成した電極のテストと並行して筋電義手制作班が作成した筋電義手の動
作実験を行う
7月 発表練習と成果物の実装・最終確認を行う
担当教員と研究室の先輩方の前での発表練習を行う
中間発表前の成果物の最終チェックと筋電義手の動作の様子をビデオに録画する
中間発表
最終目標についての確認する
8月 夏休み
9月 最終発表に向けての目標とスケジュールの決定する
後期のスケジュールの決定する
10月 筋電義手計測班の手伝いと計測する筋肉の特定する
筋電義手計測班の電極作成の手伝い
筋電義手計測班の回路作成の手伝い
作成した回路と電極の動作チェック
見学に来た高校生に実際に動作している筋電義手を見せる
11月 発表練習と被験者による筋電位の学習実験と成果物の実装・最終確認を行う
電極のチェックと並行して,今回使う筋肉の筋電位を確認する
プログラムの確認のため 5chで筋電位の識別実験を行う
発表のためのスライドの作成と前期と同様に担当教員と研究室の先輩方の前で発表練習を
行う
12月 最終発表と最終報告書の作成をする
最終発表前の成果物のチェックと筋電義手の動作の様子をビデオに録画する
最終発表
報告書作成をする
プロジェクトの初期はプログラム設計に向けた勉強とコーティングが中心であったが,役割分担
が行われてからは制御対象とする筋肉について調べ,計測位置の確認が主な仕事になった.また,
手が空いている時には他の班の手伝いを行った.
(※文責: 薬師寺尚也)
2.4.8 筋電義手制御班玉川佳奈のスケジュール
5月 プログラミングを行う環境を PC上に用意し, プログラムの知識の習得
6月 ポスター・スライドの制作
7月 発表に向けてのポスター・スライド修正
Group Report of 2012 SISP - 10 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
8月 夏休み
9月 最終発表に向けての目標とスケジュールの決定
10月 計測用電極付きサポーターの製作
11月 ポスター・スライドの制作
12月 最終報告書の作成
主に中間では, ポスター・スライドの制作を行った. 最終では, ポスタースライドに加え, 筋電位
を計測する際に使用する, 電極付きサポーターの製作を行った.
(※文責: 玉川佳奈)
2.5 中間発表時における課題と解決策
2.5.1 成果物の概要
中間発表時では, 筋電義手計測班, 筋電義手制御班, 筋電義手製作班の3つのグループに分け各作
業を行った. 各グループの成果物は以下の通りである.
[筋電義手計測班]
筋電義手の回路について, オペアンプと銀板を組み合わせたアクティブ電極を 5チャンネル分製
作し, それに加え計測用回路も 5チャンネル分製作した.
[筋電義手制御班]
筋電義手の制御について, 未学習のデータに対して高い識別率を持つサポートベクターマシン
(SVM)を用いた. そして, 去年の最終発表の成果であるジャンケン (グー, チョキ, パー)の動作に
加え, 手首の屈曲, 伸展動作の計 5動作を行った.
[筋電義手製作班]
筋電義手の製作には比較的軽量なアルミを加工し, 手の関節や腕の構造を製作した. また, 指の曲
げ伸ばしや手首の屈曲, 伸展で用いる腱を強度のある釣り糸を使用した. 動力源はサーボモーター
(11km・cm)を使用した.
(※文責: 佐々木啓孝)
2.5.2 課題
中間発表までの成果物から以下の課題が挙がった.
表面電極の位置の固定 ・・・ (1)
制御が難しい ・・・ (2)
どの筋肉が計測対象とするかの選定 ・・・(3)
筋電義手の重量 ・・・(4)
(1)について電極のずれによって大きなノイズが発生してしまうことがあった. そのため, 安定し
た計測が行えず, うまく筋電義手が動作しない可能性が考えられる.
Group Report of 2012 SISP - 11 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
(2)について手首の伸展動作とジャンケンのグーの動作の筋電位は酷似しており, サポートベク
ターマシンで識別することは困難である. また, 計測中に筋疲労の影響により徐々に筋活動が減少
していくという問題も挙がった.
(3)について計測対象とする筋肉によって識別率に大きく影響し, 各動作でどこの筋肉が多く活
動するのか正確に選定する必要がある.
(4)について, 金属の中では比較的軽量で強度の強いアルミを加工して筋電義手を製作した. しか
し, アルミを用いて作成した義手でも実用化できる程の軽量化まで到っていない. また, 金属は加工
もしにくく, 人間の腕に近い見た目に加工することは困難である.
(※文責: 佐々木啓孝)
2.5.3 解決案
中間発表までの課題を解決する案として以下の点が挙がった.
サポーター電極の製作 ・・・(1)
計測点を増やす ・・・(2)
軽くて丈夫な素材の追求 ・・・(3)
(1)について電極の計測中の皮膚のずれや体が動くことによってモーションアーチファクトが発
生する. そのため, 従来の電極はうまく筋電位の計測が行えない可能性がある. それを防ぐ方法と
して, サポーター電極を作成し, モーションアーチファクトによるノイズを軽減できるのではない
かと考える. また, サポーター電極は各筋肉上の皮膚の上に固定でき, 医療用テープの付け替えによ
る負担を減らすことができる. サポーター電極の詳細については第 3章で行う.
(2)について, 中間発表で用いた 5チャンネルよりも計測点を増やすことで, 識別率を上げられる
のではないかと考える. それは, 5チャンネル分で包含できる筋電位の情報量では足りない部分も
多いためである.
(3)について, 軽量化された丈夫な材質を使用する. そのため, 筋電義手を製作する上で人間の骨
にあたる部分にプラスチック製の材質, 人間の皮膚の部分にゴム製の材質を使用することで金属よ
りも軽量化でき, かつ見た目も人間の腕に近いものを製作できるのではないかと考える. 筋電義
手製作にあたる各種詳細については別紙の筋電義手製作班の説明で行う.
(※文責: 佐々木啓孝)
2.6 最終発表の取り組み
2.6.1 目標
最終発表の目標として, 人間の腕に近い外観を持ちと物を把持する動作を行う筋電義手の開発を
目標とした. そこで, 腕の材質にラテックスを使用し, 人間の腕の型を製作した. また, 筋電義手
の動作については, 物を掴む, 摘むように筋力を維持することができる把持行為を行った. それは,
我々の生活の中で何かを把持することは日常的に行われているが, 筋電義手のように装着者の意図
通りに正確に把持行為を行うことは難しいためである.
Group Report of 2012 SISP - 12 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
2.6.2 取り組み
筋電義手を開発する上で, 中間発表時と同様に以下の3つのグループに分けた.
生体信号計測班 ・・・(1)
筋電義手制御班 ・・・(2)
筋電義手製作班 ・・・(3)
(1) は筋電位を計測し, PCで処理しやすい形に変換するために回路を設計する班である. また,
電源回路や計測に必要な物の設計開発を行う.
(2)はマイコンに送られた表面筋電位の信号を PC上で処理し, 筋電義手を適切に動作させる. 主
にプログラムの設計や回路班のサポートなどを行う.
(3)は筋電義手の設計・開発を行う班である. この最終報告書では, 筋電義手制御班の活動につい
て紹介する. 詳細については第 3章の中で紹介している.
(※文責: 佐々木啓孝)
Group Report of 2012 SISP - 13 - Group Number 25-C
Biological Information for Social Welfare ~Development of Myoelectric hand~
第 3 章 筋電義手制御班課題解決過程の詳細
3.1 概要
筋電義手制御班では, 腕の動作の筋活動の識別を主に行った. そのため, 前年度のプロジェクトで
有効であった未学習のデータについて高い識別率を持つサポートベクターマシン (SVM)と呼ばれ
るパターン認識手法を用いた. 中間発表ではジャンケンの動作 (グー, チョキ, パー)に加え, 手首の
伸展・屈曲動作の計 5動作を行う筋電義手の開発を行った. また, 計測対象とした筋肉は, これらの
動作を行う上で主要となる筋肉を 5箇所調べ選定した.
最終発表では, 物を掴む・摘む動作に加え, これらの動作に使われる筋肉が酷似する手首の伸展・
屈曲動作を行った. 物を掴む・摘むために指先の部分に圧力センサを付け, 一定の圧力を感知する
とモーターが静止する制御を行った. また, 筋肉の中にある筋張力の調整を行う筋紡錘の代わりに
ひずみゲージを用いて糸の張力の調整を行った. その結果, 壊れやすい卵を持つことに成功した.
また, 計測対象とした筋肉は, これらの動作を行う上で主要となる筋肉を 16箇所調べ選定した.
(※文責: 佐々木啓孝)
3.2 信号計測部
3.2.1 動作と筋肉の関係
前腕には,腕の回内運動と回外運動に関わる筋と,手関節の運動に関わる筋,手指の運動に関わ
る筋がそれぞれ存在し,動作ごとに使う筋が異なっている.前腕前面の筋は手関節や手指の屈筋で
あり,前腕後面の筋は,手関節や手指の伸筋である.前腕の筋は前腕筋膜でおおわれている.前腕
筋膜は手関節の部分で厚くなり,前面で屈筋支帯,後面で伸筋支帯と呼ばれる靭帯となる.これら
は,前腕から手の部分に伸びる腱や血管などに手関節の部分で束ねている.以上の事を参考に, 計
測位置を決定した.
(※文責: 薬師寺尚也)
3.2.2 中間発表で識別に用いた筋肉
腕の筋肉は深層筋とその周りを覆う浅層筋がそれぞれ重なっており, 表面筋電図法による計測で
はこれらの筋電位が合成されて検出されてしまうという欠点がある.中間発表ではジャンケンの動
作(グー,チョキ,パー)と手首の屈曲, 伸展動作を筋電位で制御するためそれらの動作に関係す
る筋肉を調べ,5ch分の電極を前腕部に配置した. 手首の屈曲・伸展動作の識別として橈側手根屈
筋と尺側手根屈筋 (図 3.1),指の伸展動作の識別として総指伸筋,指の屈曲動作の識別として浅指
屈筋と深指屈筋 (図 3.2)を選んだ.表 3.1は計測対象とした筋肉と主な働き [4]を示している.
(※文責: 薬師寺尚也)
Group Report of 2012 SISP - 14 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
表 3.1 中間発表で計測対象とした筋肉
筋肉の名前 筋肉の場所 筋肉の主な働き
長母指屈筋 腕の前面 親指の屈曲
橈側手根屈筋 腕の前面 手関節における手の屈曲や橈屈
浅指屈筋 腕の前面 親指を除く指の関節の屈曲
深指屈筋 腕の前面 親指を除く指の関節の屈曲や手首の屈曲
長掌筋 腕の前面 手関節における手の屈曲
尺側手根屈筋 腕の側面 手関節における手の掌屈や尺屈
総指伸筋 腕の後面 親指を除く全ての指を伸ばす
尺側手根伸筋 腕の後面 手関節における手の伸展や橈屈
短母指伸筋 腕の後面 親指を伸ばす
長橈側手根伸筋 腕の後面 手関節における手の伸展や橈屈
短橈側手根伸筋 腕の後面 手関節における手の伸展や橈屈
図 3.1 手首の動作に使う筋肉
図 3.2 指を閉じるときに使う筋肉
Group Report of 2012 SISP - 15 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
3.2.3 最終発表で識別に用いた筋肉
最終発表ではつかむ動作,つまむ動作,手首の屈曲, 伸展動作を筋電位で制御するため,それら
の動作に関係する筋肉を調べ,16ch分の電極を前腕部に配置した.計測対象とした掌側の筋肉で
は、手首の動作に使う筋肉である橈側手根屈筋と尺側手根伸筋と尺側手根屈筋と長橈側手根伸筋と
短橈側手根伸筋と長掌筋 (図 3.3)を使用し,指の伸展に使う筋肉である総指伸筋と短母指伸筋を使
用した.計測対象とした手の甲側の筋肉では,指の屈曲に使う筋肉である浅指屈筋と深指屈筋と長
母指屈筋 (図 3.4)を使用した.特に,親指は物を掴む際に働くため,掴む動作と摘む動作において
重要である.そのため,親指の制御のために深層部の筋肉である長母指屈筋と短母指伸筋を使用し
た.表 3.2は計測対象とした筋肉と主な働き [4]を示している.
表 3.2 最終発表で計測対象とした筋肉
筋肉の名前 筋肉の場所 筋肉の主な働き
長母指屈筋 腕の前面 親指の屈曲
橈側手根屈筋 腕の前面 手関節における手の屈曲や橈屈
浅指屈筋 腕の前面 親指を除く指の関節の屈曲
深指屈筋 腕の前面 親指を除く指の関節の屈曲や手首の屈曲
長掌筋 腕の前面 手関節における手の屈曲
尺側手根屈筋 腕の側面 手関節における手の掌屈や尺屈
総指伸筋 腕の後面 親指を除く全ての指を伸ばす
尺側手根伸筋 腕の後面 手関節における手の伸展や橈屈
短母指伸筋 腕の後面 親指を伸ばす
長橈側手根伸筋 腕の後面 手関節における手の伸展や橈屈
短橈側手根伸筋 腕の後面 手関節における手の伸展や橈屈
Group Report of 2012 SISP - 16 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
図 3.3 動作に使う掌側の筋肉
図 3.4 動作に使う手の甲側の筋肉
(※文責: 薬師寺尚也)
Group Report of 2012 SISP - 17 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
3.2.4 電極の位置
中間発表の時は電極を医療用テープで直接皮膚に貼る方法をとっていた.最終発表では計測用電
極付きサポーターを制作した.これは,従来の方法だと計測点の増加に伴い電極が張り付けにくく
なる事と,貼るのに時間がかかってしまうという問題を解決するためである.計測用電極付きサ
ポーターを制作するにあたって,被験者の腕から電極を貼り付ける位置を確認し,最も良い計測が
行える計測位置に電極が当たるようにした.その中でも,浅指屈筋,深指屈筋,長掌筋と長橈側手
根伸筋,短橈側手根伸筋は浅層と深層で重なっており計測する際に位置がほとんど変わらない.ま
た,手の動作に使用する筋が同じであるために計測位置が同じである.実験に使用した計測用電極
付きサポーターと筋肉の位置を図 3.5, 3.6に示した.また,計測位置と chの対応を表 3.3に示す
[4].
表 3.3 計測用電極付きサポーターと筋肉の位置
ch 使用した筋肉の名前
1ch 長母指屈筋
2ch 橈側手根屈筋
3ch 浅指屈筋 深指屈筋 長掌筋
4ch 浅指屈筋 深指屈筋 長掌筋
5ch 浅指屈筋 深指屈筋 長掌筋
6ch 尺側手根屈筋
7ch 尺側手根屈筋
8ch 総指伸筋
9ch 総指伸筋
10ch 尺側手根伸筋
11ch 尺側手根伸筋
12ch 尺側手根伸筋
13ch 短母指伸筋
14ch 短母指伸筋
15ch 長橈側手根伸筋 短橈側手根伸筋
16ch 長橈側手根伸筋 短橈側手根伸筋
Group Report of 2012 SISP - 18 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
図 3.5 計測用電極付きサポーターの前面
図 3.6 計測用電極付きサポーターの後面
(※文責: 薬師寺尚也)
3.2.5 計測点を増やすことによる不安な点について
最終発表において,中間発表の時よりもより正確な識別を可能とするため計測点を 5ch から
16chに増やした.侵襲式の筋電位計測では計測対象とする筋の信号を正確に計測できるため計測
点を増やすことは有効な手段であるといえる.しかし,表面筋電図法の計測に関しては有効な手段
であるかは不明であった.計測位置を増やすことは筋電位の特徴量を正確に検出し,より正確に識
別が可能になると思われる.しかし,表面筋電位の欠点として計測位置における浅層の筋肉と深層
の筋肉が重なっているため,それぞれの筋肉が発生した筋電位が合成されて検出されてしまう点が
ある.そのため,特徴的な信号が計測できずに情報量が増えることで, 識別が難しくなってしまう
のではないかという不安があった.
(※文責: 薬師寺尚也)
Group Report of 2012 SISP - 19 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
3.2.6 不安な点の解決策と結果について
3.2.5章で記述した計測点を増やすことへの不安な点について,できる限り電極を小さくするこ
とや,中間発表よりも識別率の高いサポートベクターマシンを用いることで解決を図った.結果と
して,識別率が向上することはなかった.また,最終発表では 5chで計測を行ったが,識別が可能
であった.そのため,計測点が多ければ多いほど良いという事ではないということが分かった.
(※文責: 薬師寺尚也)
3.3 信号処理部
3.3.1 制御の問題点
腕の筋肉は深層筋の筋肉と同じ筋繊維上に表層筋が重なっている. そのため, 計測される筋電
データは図 3.7に示すように, 様々な周期の神経インパルスが重なった波形をしており, そのまま
の識別することは困難である. また, 安藤らは肩の直交する表層筋の上部僧帽筋と深層筋の頭板状
筋の周波数の違いにより識別する研究を行っている [5].
現在信号の識別で用いられている主な方法として, ニューラルネットワークやサポートベクター
マシン (SVM)などのパターン認識手法が多い. 本プロジェクトでは未知のデータに対して高い識
別率を持つサポートベクターマシン (SVM)を用いた. 中間発表ではサポートベクターマシンを用
いて, ジャンケンの動作(グー, チョキ, パー)に加え, 手首の屈曲, 伸展の計 5動作を学習させ識別
を行った. 最終発表では, 中間発表と同様の方法を用いて, モノを掴む, 摘む, 手首の屈曲, 伸展動作
の計 4動作を学習させ識別を行った (図 3.8). サポートベクターマシンについての詳細は 3.3.2節
で説明していく.
図 3.7 計測される筋電データ
図 3.8 動作を PC上で学習
Group Report of 2012 SISP - 20 - Group Number 25-C
Biological Information for Social Welfare ~Development of Myoelectric hand~
(※文責: 樋山貴洋)
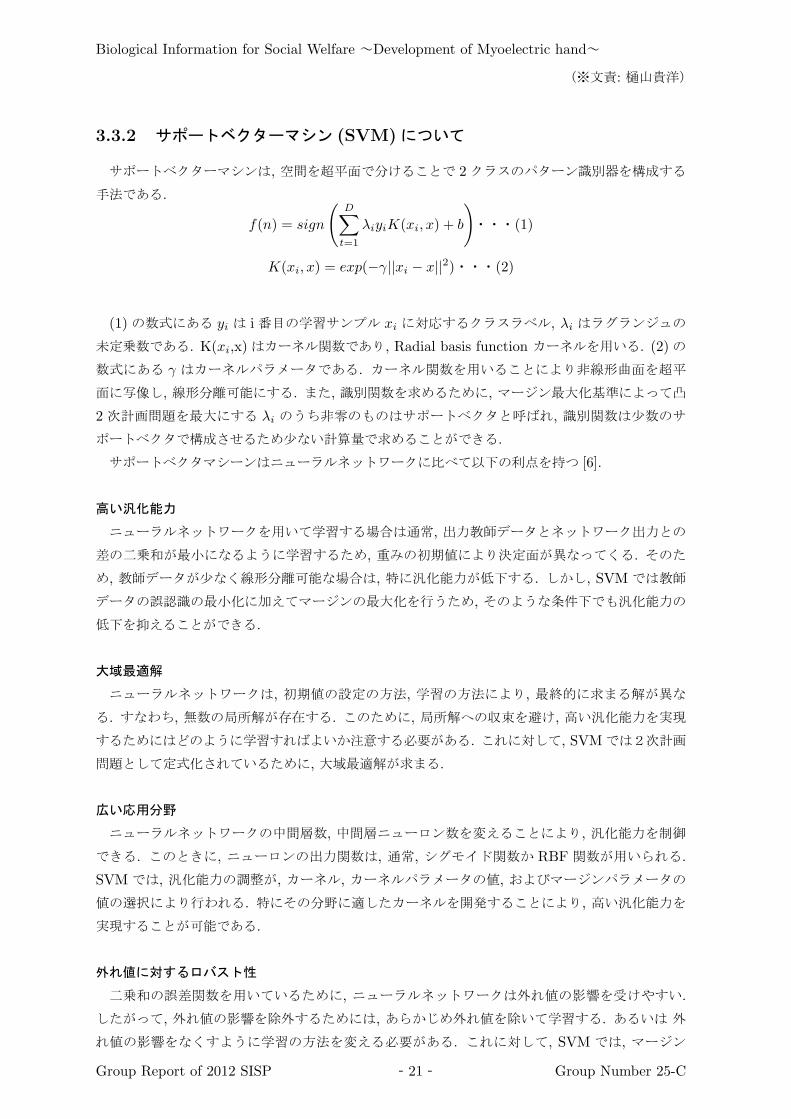
3.3.2 サポートベクターマシン (SVM)について
サポートベクターマシンは, 空間を超平面で分けることで 2クラスのパターン識別器を構成する
手法である.
f(n) = sign
(
D∑
t=1
λiyiK(xi, x) + b
)
・・・(1)
K(xi, x) = exp(−γ||xi − x||2)・・・(2)
(1)の数式にある yi は i番目の学習サンプル xi に対応するクラスラベル, λi はラグランジュの
未定乗数である. K(xi,x)はカーネル関数であり, Radial basis function カーネルを用いる. (2)の
数式にある γ はカーネルパラメータである. カーネル関数を用いることにより非線形曲面を超平
面に写像し, 線形分離可能にする. また, 識別関数を求めるために, マージン最大化基準によって凸
2 次計画問題を最大にする λi のうち非零のものはサポートベクタと呼ばれ, 識別関数は少数のサ
ポートベクタで構成させるため少ない計算量で求めることができる.
サポートベクタマシーンはニューラルネットワークに比べて以下の利点を持つ [6].
高い汎化能力
ニューラルネットワークを用いて学習する場合は通常, 出力教師データとネットワーク出力との
差の二乗和が最小になるように学習するため, 重みの初期値により決定面が異なってくる. そのた
め, 教師データが少なく線形分離可能な場合は, 特に汎化能力が低下する. しかし, SVMでは教師
データの誤認識の最小化に加えてマージンの最大化を行うため, そのような条件下でも汎化能力の
低下を抑えることができる.
大域最適解
ニューラルネットワークは, 初期値の設定の方法, 学習の方法により, 最終的に求まる解が異な
る. すなわち, 無数の局所解が存在する. このために, 局所解への収束を避け, 高い汎化能力を実現
するためにはどのように学習すればよいか注意する必要がある. これに対して, SVMでは2次計画
問題として定式化されているために, 大域最適解が求まる.
広い応用分野
ニューラルネットワークの中間層数, 中間層ニューロン数を変えることにより, 汎化能力を制御
できる. このときに, ニューロンの出力関数は, 通常, シグモイド関数か RBF 関数が用いられる.
SVMでは, 汎化能力の調整が, カーネル, カーネルパラメータの値, およびマージンパラメータの
値の選択により行われる. 特にその分野に適したカーネルを開発することにより, 高い汎化能力を
実現することが可能である.
外れ値に対するロバスト性
二乗和の誤差関数を用いているために, ニューラルネットワークは外れ値の影響を受けやすい.
したがって, 外れ値の影響を除外するためには, あらかじめ外れ値を除いて学習する. あるいは 外
れ値の影響をなくすように学習の方法を変える必要がある. これに対して, SVM では, マージン
Group Report of 2012 SISP - 21 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
パラメータ Cの値を調整することにより誤認識を制御することができる. 大きな Cの値を設定す
ると誤認識が抑制され, 外れ値の影響を受けやすいが, 小さな Cの値を設定すると分布から外れた
データが誤認識されるようになる. したがって, Cの適切な値を設定することにより, 外れ値の影響
を抑えることができる.
これらの利点からサポートベクターマシン (SVM)によるパターン認識手法を用いて, 筋電位に
よる動作識別を行った. SVMの学習・識別アルゴリズムは, SVMライブラリである LIBSVM[7]
を用いて実装した.
(※文責: 樋山貴洋)
3.3.3 マイコンについて
本プロジェクトで使用したマイコンは図 3.9 に示す Arduino(GHEO Electronics 社) である.
Arduinoを使用した理由として, PC上でリアルタイムの結果を見ることができる点や A/D変換
等のプログラムを容易に書ける点などインターフェースが充実している点も大きい.
Arduino マイコンの性質として 0~5V の入力電圧しか扱うことができない. また, Arduino は
1Byteで A/D変換を行うため, 0~255までの 256段階でデータが PCに送信がされる. そのため,
0~5Vの筋電位を 256段階に変換すると, 1段階毎に約 19.5mVずつでしか送ることができないこ
とがわかる.
実際の信号処理においては Arduinoを 2つ使用し, 1つは計測した筋電データを PC上に送信す
るマイコンであり, もう 1つのマイコンは PC上で処理させたデータを筋電義手が適切に動くよう
に, サーボモータへ任意の動作のためのパルス幅を送信するものである.
図 3.9 Arduino
(※文責: 樋山貴洋)
3.3.4 学習のしくみ
計測したデータを PC上で処理するために, 学習識別のプログラムを Processingを使用してコー
ディングを行った.
学習のしくみとして, 各動作 (初期状態, 物を掴む, 摘む, 手首の屈曲, 伸展)の計 5動作を各 1秒
Group Report of 2012 SISP - 22 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
間ずつ計 3回被験者に行ってもらい, PC上で各動作の筋電位の強さによる計 100個のデータ (1個
のデータ当たり 10msec毎)を入力した. 初期状態とは被験者に力を抜いてもらった状態である. さ
らに, その筋電位の強さによるデータの計 3回の平均をサポートベクターマシンにより識別を行っ
た.
具体的な学習のしくみついて物を掴む, 摘む動作を 2チャンネルの筋電データの例で説明してい
く.実際に図 3.10のように積分された筋電位が観測できたとする.
図 3.10 1, 2chによる積分された筋電位
その後に, 1ch, 2ch で観測された筋電位による時間毎の関係を, 1ch に横軸, 2ch に縦軸として,
図 3.11のようなグラフを作る. そして, 筋電位による時間毎に各点が図 3.12のようにプロットさ
れるとする.
図 3.11 時間毎の筋電位による関係図 図 3.12 時間毎の筋電位による関係図
物を掴む動作では赤い○の点がプロットされ, 物を摘む動作では青い×の点がプロットされたと
すると (図 3.13), ここでサポートベクターマシンによるパターン認識を用いる. サポートベクタマ
シーンによるパターン認識の手法から各動作の一番近い点に注目される.
図 3.13 物を掴む, 摘む動作でのプロット図(例)図 3.14 物を掴む, 摘む動作でのプロット図(例)
ここでは, 赤い○の点と青い×の点が注目される (図 3.14). そして, 注目された点の距離が最大
Group Report of 2012 SISP - 23 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
になるつまり, その距離の長さの二分の一に領域分けされる (図 3.15). これをマージン最大化と呼
ばれている. その領域分けされた点が物を掴む, 摘む動作となり, パターンの領域がされる.
図 3.15 領域分けのしくみ
実際に学習し, 領域分けされた点からリアルタイムでの操作を行う. 例えば, 図 3.16のように黒
い○点が青い領域に入るとする. その領域は物を摘む青いパターンの領域であるので, 筋電義手も
物を掴む動作をとる.
図 3.16 学習から筋電義手の動作の流れ
(※文責: 樋山貴洋)
3.3.5 指の動作構造
図 3.17は指の動作構造を示している. ワイヤーをサーボモータで引っ張ることにより指の動作
を可能としている. サーボモータを右回転させることで指の伸展動作, 左回転させることで 指の屈
曲動作を行う.
図 3.17 指の動作構造
Group Report of 2012 SISP - 24 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
(※文責: 樋山貴洋)
3.3.6 力の制御について
図 3.18 は力の制御の方法である. 力の制御について人間の触覚にあたる部分つまり, 物が触れ
たときに生じる知覚として圧力センサーを用いた. 圧力センサーは物の圧力を感知したときにセン
サーの値が変化するもので筋電義手の人差し指と親指, そして薬指の指先に付けた. 人差し指と親
指に付けた理由としては, 物を摘む際に親指と人差し指はさみ込むためである. また, 薬指について
は, 筋電義手が物を掴む動作を取った場合に, 他の指に比べ曲がりやすくかつ, 安定した動作ができ
るからである.
次に人間の筋肉にあたる部分には, サーボモーターを使用した. サーボモーターは 28(kg・cm)
を使用し, 中間発表時のサーボモーター (11kg・cm)に比べ2倍以上力が強いものを選定した. そ
して, 骨格筋の中にあり, 筋肉の伸縮状態を感知する筋紡錘と呼ばれる受容体の代わりにひずみセ
ンサを付けた. 筋紡錘は, 主に人間の筋肉の張力を感知し, 伸張の度合いに応じて変化するもので,
ひずみセンサも同様な役割を持たせた. 具体的には, 筋電義手の指を動かすときにモーターが任意
の値まで動かすが, その際にワイヤーも任意の長さまで引っ張られる. そのときの張力を調整する
のがひずみセンサーの役割となる.
図 3.18 学習から筋電義手の動作の流れ
(※文責: 樋山貴洋)
3.3.7 物を掴む, 摘む方法について
図 3.19は物を掴む, 摘む方法である. まず物が圧力センサつまり, 指先に触れた際にセンサの値
が変化する. 圧力センサ任意の値に変化すると, サーボモーターの動作が停止する. その停止して
いる状態のワイヤーの張力をひずみゲージによって維持する.
Group Report of 2012 SISP - 25 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
図 3.19 物を掴む, 摘む方法
(※文責: 樋山貴洋)
3.4 計測用電極付きサポーター
中間では, 筋電位計測のため 5ch分(計 10個)の電極を医療用テープで腕に貼り付けていた. し
かし, 最終では 16ch分(計 32個)の電極で計測を行うため, 32個の電極を腕に貼り付けなければ
ならない. これをすべて医療用テープで貼るのは困難であり, 手間もかかってしまう. このことか
ら今回, 計測用電極付きサポータを製作することで, すぐに計測が行えるようにした.
使用した材料
• 電極
直径 10mmのアクティブ電極を使用した.
• スナップボタン
8mmの打具を使用し取り付けるタイプのスナップボタンを使用した.
• ケーブルスパイラルカバー
半透明の 1mサイズのケーブルスパイラルカバーを 3本使用した.
• ゴム
直径 1.5cmのビニール製のゴムを使用した.
• サポーター
白色の膝用サポーター Lサイズを使用した.
• 導電布
縦 24cm横 26cmの導電布を使用した.
• 布
縦 25cm横 18cmの綿の布を使用した.
• ファスナー
白を基調とした 20cmのファスナーで, ムシ(ファスナーのかみ合わせ部分のギザギザ)と
スライダー(引き手)が金属のものを使用した.
(※文責: 玉川佳奈)
Group Report of 2012 SISP - 26 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
3.4.1 ボタン付き電極
ボタン付けについて
スナップボタンの凸パーツを電極 (図 3.20)の上部側に取り付けた. これは, 電極をスナップボタ
ンによりサポーターに固定させるためである. また, スナップボタンを貼り付けるために電極作り
で使用したボンドと同じものを使用した.
図 3.20 ボタンを付けた電極
電極の配線について
32個すべての電極には, 1本ずつ配線が繋げられている. すべての電極をサポーター内に取り付
けた際, 配線がいずれかの電極の銀板に重なってしまうと, 計測が正確に行えなくなってしまう. こ
の問題を解決するため, それぞれの配線と電極の銀板とが重ならないよう, ゴムを使用しまとめた.
また, サポーター外にはみ出た 32本の配線は, ケーブルスパイラルカバー (図 3.21)を用いて絡ま
らないようにまとめた.
図 3.21 ケーブルスパイラルカバーでまとめた配線
(※文責: 玉川佳奈)
3.4.2 サポーターの設計・製作
サポーターは, 最終発表で被験者となるプロジェクトメンバーの腕を元に設計し, 被験者専用サ
ポーターとして製作した.
Group Report of 2012 SISP - 27 - Group Number 25-C
Biological Information for Social Welfare ~Development of Myoelectric hand~
サイズについて
筋電位を計測する際, 腕と電極の間に隙間があると正確に計測が行えない. このことから, 電極と
腕の間に隙間ができるのを防ぐために, サポーターのサイズは, 被験者の実際の腕の太さより小さ
めに設計した.
膝用サポーターの加工
サポーターは, 加工しやすいよう膝用 Lサイズの大き目のものを使用した. 膝用サポーターを一
旦切り開き, 設計した形通りに型を抜いた.
導電布について
型を抜いたサポータの内側に図 3.22 の導電布を縫い付けた. 導電布は銀を蒸着させた柔軟性、
伸張性のある布である. 電極を配置した位置を導電布で覆うことで, 皮膚との基準電位を合わせ, ハ
ムノイズを遮蔽することを可能とする [8].
図 3.22 導電布
縫い方について
サポーターは小さめな設計のため, 装着する際, 生地が伸縮しなければならない. 縫い目の間を空
けずにかっちり縫う方法をとると, 生地が伸縮しづらくなるだけでなく, 生地が伸びた際に糸が切
れてしまう恐れもある. そこで, 並縫いを使用することで縫い目に間ができ, ある程度の伸縮性がう
まれ, 糸が切れるリスクを緩和させることができた.
スナップボタンの取り付け
電極を付ける位置を 16ch分(16箇所)決定し, サポーターと導電布が縫い合わされた布に, 印
をつけた. その印を元に, スナップボタンの凹パーツを打具と金槌を用いて取り付けた. このとき,
互いの電極が近くなりすぎて接触しないよう, 1.5cm以上の距離をとるようにした.
ファスナーの利用
ファスナーを使用し, サポーターの内側 (図 3.24)を広げられるようにした. これにより, 電極が
壊れた際のメンテナンスが容易になった. また, ムシとスライダー部分がプラスチックではなく金
属のものを使用した. これは, 小さめに設計されたサポータを装着する際に, ファスナーが壊れてし
まうことを防ぐためである. ファスナーは, 手首から肘方向へと閉まるようにサポーターに縫い付
けた. これは, 装着者が手首部分を自分で抑えながらファスナーを閉められるようにするためであ
Group Report of 2012 SISP - 28 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
る. これにより, 装着者1人でサポーターを装着できるようにした. ファスナーの色は, サポーター
の色と合わせるため白にした.
電極周りの布について
実際に完成した「計測用電極付きサポーター」(図 3.23)装着し, 計測を行ったところ, 電極の銀
板と導電布が触れあってしまい, 正確に計測が行えなかった. この問題を解決するために, 各電極と
導電布の間に, 布をはさんだ. これにより, 銀板が導電布に直接触れることはなくなり, 正確に計測
が行えるようになった.
図 3.23 完成したサポーターの外観 図 3.24 完成したサポーターの内観
(※文責: 玉川佳奈)
3.5 ポスター制作
我々が開発した筋電義手について, 他者にわかりやすく説明するため, ポスターの制作を行った。
本プロジェクトでは, 計4枚のポスターを制作したが, 筋電義手制御班が担当したものは「メイン
ポスター」, 「筋電義手制御班のサブポスター」の計2枚である. いずれも A1サイズで制作した.
使用したソフトウェア
• Adobe Illustrator CS6
ポスターのレイアウトや説明文の入力、説明する際に使用するイラストや図の制作を行うた
め使用した.
• Adobe Photoshop CS6
ポスターに使用する写真の加工を行うために使用した.
(※文責: 玉川佳奈)
3.5.1 メインポスター
内容について
メインポスターは, プロジェクト全体で何を行い, どのような成果が得られたのかわかるように,
内容を構成した. また, ポスターを展示し, 見てもらう際, ある程度離れた距離から見ることを前提
としたため、盛り込む情報量と文字サイズに注意し, 提示する情報量を調節した. 外国の方にも見
て頂けるように, すべての説明文に対応する英訳文を挿入した.
Group Report of 2012 SISP - 29 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
説明の流れは, 以下の通りである.
• 目的
最後までポスターを読まなくても私たちが何を行ったかを, 知ってもらえるため, 初めに目
的を記述した.
• 処理の流れ
義手を動作させるために必要な処理を記述することで, 読み手にどのような処理が必要かを
理解してもらうようにした. また, 各班が処理の中のどの部分に関連しているのかを示すた
めにも利用した.
• 成果物
中間では, 実際に開発した義手の機能の説明のみを載せていたが, 最終では, 義手の機能に加
え, 各班で得られた成果についても記述した. これにより, 各班で行ったことを大まかに知っ
てもらうことができた.
文字について
フォントは「小塚ゴシック Pro」を使用した. このフォントはやや丸みを帯び, 優しい印象を与
えるため, 福祉をテーマにした本プロジェクトにふさわしいと考え使用した. 文字サイズは見出し
や本文で使い分け, 読みやすいよう全体的にメリハリをつけた. ポスターを見る人の大半は日本人
であると判断し, 英訳文は日本文より文字サイズを小さくし, 補助的役割に留めた.
色について
図 3.25 の処理の流れに描かれている誘導する棒線は色分けされており, これは各処理のサブポ
スターのテーマカラーと対応づけた. これにより, サブポスターの説明は全体の処理のどの部分に
あたるのか, 色でわかるようにした. また, 最終成果にある班名の直前に描かれた五角形マークも色
分けされており, それぞれの班のテーマカラーとして表した. これらから, 色別に対応させて見るこ
とによって各班の処理、サブポスターがどれなのかを判断できるよう表現した.
写真について
実際に処理で使用された道具の写真を載せることで, 他者が処理の流れをイメージしやすいよう
にした. メインポスターでは, 計6枚の写真を使用したが, それぞれ撮影場所や環境が違ったため,
背景がばらばらであった. そこで Photoshop を使用し, すべての背景を取り除いた. これにより,
ポスター全体に統一感が生まれた.
デザインについて
メインポスターは, 各サブポスターのテーマカラーを組み合わせた配色にすることで, サブポス
ターとの差別化を図った. 処理の流れの説明の箇所に, 誘導するような棒線を描き, 順番に説明を読
んでもらうようにした. また, 開発した義手の写真を大きめに配置することで, アイキャッチャーの
役割を持たせた.
(※文責: 玉川佳奈)
Group Report of 2012 SISP - 30 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
図 3.25 メインポスター
3.5.2 筋電義手制御班のサブポスター
内容について
筋電義手制御班が何を行ったかがわかるよう, 内容の構成を考えた. また, メインポスター同様,
ある程度の距離からポスターを見ることを前提として、盛り込む情報量の調節を行った.
説明の流れは, 以下の通りである.
• 識別の方法
識別を行うためにサポートベクターマシンを使用したことを記述することで, 次の識別のし
くみの説明につなげられるようにした. また, サポートベクターマシンを使用した理由につ
いて述べることで, サポートベクターマシンの機能や利点など, 読み手に理解してもらえる
ようにした.
• 識別の仕組み
識別の仕組みを言葉だけで説明すると, 長い文章の羅列になってしまい, 読み手に負担を与
えかねない. このことから, 識別のしくみを8つの段階に分け, 図を利用することで最低限の
文章で理解できるように工夫した.
• 多次元の利用
識別の仕組みの説明では, 例として 2ch(2次元)を使用した場合の説明を行ったが, 実際に
は 16ch(16次元)での識別を行った. このことを説明するために, 次元数を増やすことによ
るメリットを踏まえながら, 16chで識別を行ったことを説明した. また, ここで識別を可能
Group Report of 2012 SISP - 31 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
とした動作を紹介することで実際の識別の成果を示した.
• センサの利用
「物を掴む・摘む」動作を可能とする筋電義手にするため, 人間の触覚の代わりにセンサを利
用したことを記述した. また, 筋電義手制御班で行ったセンサによる制御のしくみをここで
述べ, 義手がどのようにモノを壊さずにつかんでいるのかを理解してもらえるようにした.
文字について
フォントは「小塚ゴシック Pro」を使用した. これはサブポスターをメインポスターのフォント
に合わせることによって, 連携していることがわかるようにするためである. 盛り込む情報を最小
限にとどめたものの, レイアウト内に説明文が入りきらなかったので, 識別のしくみの説明文を他
の説明文より文字サイズを小さくし, 改善した. 図中には最低限の文字しか入れないようにし, すっ
きりとした印象を与えるようにした.
色について
筋電義手制御班のテーマカラーである緑を基調にレイアウトを行った. また, グラフには境界線
や違いがはっきりわかるよう, 赤と青という対比させた色を使用した. 色を使いすぎると, 見た目の
美しさが失われてしまうので, なるべく不必要な色は入れないように気をつけた.
イラストについて
説明する際に使用するグラフがイラストでなければ表現できなかったため, 他の手や義手を載せ
る際, 写真を使用せずイラストにした. これにより統一感を出すことができた. また, 手や義手のイ
ラストは, 実際の手や義手をよく観察し, それぞれの特徴を再現するため, 複数のツールを組み合わ
せて制作した. センサの利用で使用している手と義手のイラストは, 同じ手の形をとっており, 比較
しやすいようにしている. 実際にこのイラストを制作した時は, まず手を描き, 完成した手のイラス
トの上から義手のイラストを描くことによって同じ手の形をとるイラストを完成させることがで
きた.
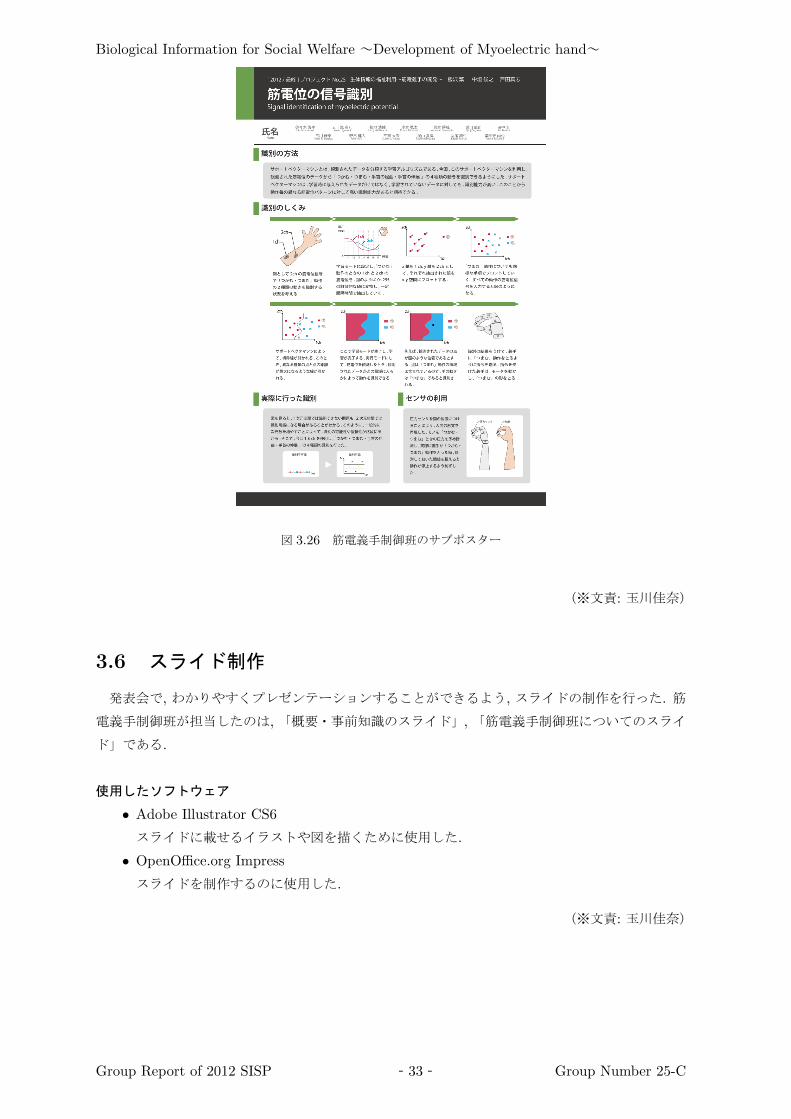
デザインについて
文字ばかりにならないよう, 図と説明文のスペースの割合を考えて配置した (図 3.26). また, メ
インポスター同様, 順番が決まっている説明の場所に誘導する棒線を描き, 順番に説明を読んでも
らうようにした. 義手のイラストは, 機械的なものを連想させるようなデザインを考え, ネジなど
細かい部分も表現することにこだわった. これにより, 義手と手の差別化を図ることができた. ま
た, センサを利用することによって, 繊細なモノも持つことができるということを表現するために,
義手がつかんでいるモノを卵にした. 説明文の背景が灰色の場所に図を配置すると, 図が見づらく
なってしまうため, さらに図の背景を白色にすることで見やすいようにした.
Group Report of 2012 SISP - 32 - Group Number 25-C
Biological Information for Social Welfare ~Development of Myoelectric hand~
図 3.26 筋電義手制御班のサブポスター
(※文責: 玉川佳奈)
3.6 スライド制作
発表会で, わかりやすくプレゼンテーションすることができるよう, スライドの制作を行った. 筋
電義手制御班が担当したのは,「概要・事前知識のスライド」,「筋電義手制御班についてのスライ
ド」である.
使用したソフトウェア
• Adobe Illustrator CS6
スライドに載せるイラストや図を描くために使用した.
• OpenOffice.org Impress
スライドを制作するのに使用した.
(※文責: 玉川佳奈)
Group Report of 2012 SISP - 33 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
3.6.1 概要・事前知識のスライド
内容について
各班の説明を理解するために, 必要な知識を前もって説明するようにした. また, 私たちが開発し
た筋電義手についての概要を説明した.
説明の流れは, 以下の通りである.
• 代表的な筋電義手について
筋電義手とはどのようなものかを大まかに知ってもらうため, 動画を用いて説明した. 動画
は, 実際に筋電義手を装着し, 動作させてるものを使用することで, どのように使用している
のかをイメージできるようにした.
• 筋電義手が動作するまでの流れ
義手が動作するための手順を説明することにより, どのような処理が必要か知ってもらった.
また, この流れに沿って以降説明することを提示し, 説明の流れを予め把握してもらえるよ
うにした.
• 脳からの信号
これからの各班の説明に何度も出てくる筋電位について, どのようなものかを予め知っても
らうために説明を行った. ここでは, 筋肉を動かすときに脳から信号が出され, その信号が脊
髄を通り、運動ニューロンを興奮させ, 神経筋接合部に到達するということを説明した。
• 筋電位の発生
脳から到達した信号は、接合部の筋繊維を興奮させ, 電位変化を起こすことを説明した. こ
の電位変化量を私たちは筋電位として計測し, 使用したことを説明した.
• 侵襲的計測
侵襲的計測方法について説明した. 体内に電極を入れて計測することによる長所・短所につ
いて説明した.
• 表面筋電位の計測
侵襲的計測方法の短所となる部分がない計測方法として、表面電極の計測についての説明を
行なった. 皮膚の表面に, 電極を貼り付けて計測を行うことの短所と, そのことにより筋電義
手の制御が難しくなることを説明した.
• 筋電義手開発の目的
上記の説明の後に, 表面筋電位を計測する方法で筋電義手を開発したこと, ターゲットと
した装着者, 実現する手の動作について説明した。
文字について
目的を説明するスライド以外, 説明文は記入しなかった. これは, 図による視覚的情報量と, 口頭
説明による聴覚的情報量のバランスを保つためである. 結果として, 必要最低限の情報のみを表現
したスライドは, すっきりとして見やすくなった.
イラストについて
筋電位の説明では, 脳からの信号がどのように伝わっていくのか, 動きがわかるように信号のみ
移動しているイラストを何枚も作り, 理解しやすいようにした. 図 3.27を見てわかるように, イラ
Group Report of 2012 SISP - 34 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
ストには, 色のついている部分と色が付いていない部分がある. これは, 説明の際, 重要となってく
る部分にのみ色を塗ることで, その部分に注目してもらうためである.
図 3.27 脳からの信号のイラスト
デザインについて
表紙は, メインポスター (図 3.28)で使用した各班のテーマカラーの 5角形でデザインした. これ
により, 展示しているポスターとの統一感を表現した.
図 3.28 スライドの表紙
(※文責: 玉川佳奈)
3.6.2 筋電義手制御班のスライド
内容について
筋電義手制御班が行った制御のしくみについて理解しやすいよう, 詳しく説明した. また, ポス
ターと同じ構成順序にすることで, ポスターとスライドの両方見た人に混乱を与えないよう, わか
りやすく表現した.
説明の流れは, 以下の通りである.
• 制御の問題点
皮膚表面で筋電位を計測すると, 複数の筋肉からの筋電位が合成されて検出されてしまい,
動作を識別することは難しくなることを説明した.
Group Report of 2012 SISP - 35 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
• 識別の方法
問題点を解決するためにサポートベクターマシンを使用したことを説明した. また, サポー
トベクターマシンの利点についても説明した.
• 学習のしくみ
1chと 2chで「物を掴む・摘む」動作の学習を例として, グラフを使用し説明した.
• パターン識別の仕組み
学習のしくみで得られたグラフから, サポートベクターマシンを用いたパターン認識の方法
について説明をした.
• 動作識別の仕組み
パターン識別の仕組みで生成された領域分けのグラフから, どのように動作識別が行われる
かを説明した.
• 指の動作構造
動作識別の結果から, 実際に義手が「物を掴む・摘む」動作をとるしくみについて説明する
に当たって, 指の動作構造について説明した.
• 物を掴む・摘む方法
人間と義手とを比較しながら, 「物を掴む・摘む」動作を可能とするしくみについて説明
した.
• 筋電義手制御班のまとめ
まとめとして, 筋電義手制御班は実際に行った制御についての説明をした.
文字について
視覚的情報量が多くなりすぎないように, 必要最低限の説明文のみをスライドに記述するように
した. また, 重要な部分の文字は, 赤色にするなどし, 注目してもらえるようにした.
イラストについて
モノをつかむ・つまむ方法のスライドでは, 図 3.29のように人間の手と義手とを比較するような
イラストを描くことで理解しやすいようにした. 筋肉や筋紡錘は, 腕の中にあるということを表現
するために, 皮膚の表面をめくった中に, 筋肉と筋紡錘を描いた. また, 同じ機能を持つものの文字
の高さ, 位置を合わせることで機能の対応を示した.
図 3.29 物を掴む・摘む方法のイラスト
Group Report of 2012 SISP - 36 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
デザインについて
筋電義手制御班の説明に入る際, 図 3.30のように, 全体の処理のどこの部分について説明するの
か理解しやすいように四角で囲んだデザインにした. 筋電義手制御班だけでなく, 他の各班の説明
直前にもそれぞれの処理の場所に四角を描いたスライドを挿入した.
図 3.30 筋電義手制御班の説明の表紙スライド
(※文責: 薬師寺尚也)
3.6.3 動画撮影
開発した筋電義手を中間発表と最終発表でのデモンストレーションとして実際に動作させた. 発
表の際、製作した筋電義手が不具合により動かなかった時や意図した動作をしなかった時のため
に, 前もって動画撮影を行った。動画撮影を行うにあたって以下の機材を使用した。
使用した機材
• カメラ:NICON D5100
動画を撮影するために使用した.
• カメラ三脚:SLIK SPRINT66
動画のブレを防ぐために使用した.
• 製作した筋電義手
実演のために使用した.
• 空のペットボトル
筋電義手が実際にモノを掴めることを示すため使用した.
• 生卵
筋電義手が実際にモノを摘めることを示すため使用した.
• 皿
生卵のための受け皿として使用した.
Group Report of 2012 SISP - 37 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
内容について
発表本番の流れを想定した構成内容にした. また, 筋電義手の動作がスムーズに行えるように撮
影することにで, 動画が長くなりすぎないように調節した. 実際に撮影された動画の長さは, 1分~
2分の間に納まった.
説明の流れは, 以下の通りである.
• 筋電義手の初期状態
筋電義手を安定して動作させるために, 被験者が安静な状態を保った. その際、義手は安定
した状態を保った. また, 各動作毎に初期状態をはさむことで, 筋電義手の各動作を区別しや
すいようにした.
• 手首の屈曲動作
被験者が手首の屈曲動作を行うことで義手も同時に手首が屈曲した動作をさせた.
• 手首の伸展動作
被験者が手首の伸展動作を行うことで義手も同時に手首が伸展した動作をさせた.
• モノを掴む動作
実際に製作した義手が, モノを掴むことができることを示すために撮影した. 掴むモノは, 空
のペットボトルとした. 筋電義手がモノを掴むためには指先についている圧力センサが適切
な値まで変化する必要がある. そこで, モノを潰さず掴めることを表現するために, 比較的硬
くて持ちやすいとされるペットボトルを選んだ.
• モノをつまむ動作
製作した筋電義手がモノを摘むことができることを示すために撮影した. 圧力センサの利用
により, 繊細なモノまで摘めることをを示すため, 生卵を摘ませた.
• 生卵の証明
つまむ動作で使用した卵が, 本物の生卵であることを証明するために卵を割り, 皿に出した.
音声について
視聴者にできるだけわかりやすく動画を見てもらえるように映像だけでなく, 音声も使用した.
各動作毎に, どの動作を行うのかを音声に吹き込むことで, 筋電義手が行う動作を容易に把握する
ことができる. 音声をできる限りクリアに入れるため, 人が少ない時間帯に動画の撮影を行った.
撮影環境について
実際に撮影された動画の一部分の画像を図 3.31に示した. 撮影された環境は公立はこだて未
来大学の 3階スタジオである.
Group Report of 2012 SISP - 38 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
図 3.31 実際に撮影した動画の一部
結果
動画を撮影するのは, 発表の際, うまくいかなかった時に研究成果である筋電義手の動作を見せ
るためである. そのため, 撮影するのは完璧に動作している筋電義手でなければならず, 何度も取り
直した. その結果, 完璧な動作を行う筋電義手を撮影することができたが, 図 3.31のような暗い動
画になってしまった. それ以降, 筋電義手のトラブルや最終発表まで時間がなかったため, 図 3.31
の動画を最終発表で使用した. そのため, 最終発表終了後に再度筋電義手の動画を取り直した. そ
のときの図 3.32を以下に示した.
図 3.32 後日撮影し直した動画の一部
(※文責: 薬師寺尚也)
Group Report of 2012 SISP - 39 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
第 4 章 結果
4.1 プロジェクトの結果
前期では,ジャンケンの動作 (グー, チョキ, パー)に加え, 手首の屈曲, 伸展の計 5動作をサポー
トベクターマシン (SVM)により学習した. その結果, 初期状態から各 5動作を識別することを可
能となった. しかし, 誤動作もあり, 被験者自身で筋力の調整を行う工夫をする必要があることがわ
かった.
後期では, 筋電義手動作制御に物を掴む, 摘む動作と手首の屈曲, 伸展動作の計4動作を前期同様
にサポートベクターマシン (SVM)により学習させた. その結果, ペットボトルのような硬い物を
持つことから卵のような割れやすいものを持つことに成功とした. しかし, 物を掴む, 摘む動作と手
首の屈曲, 伸展動作の筋電位は酷似しているため, 4動作を完全に識別できたとは言えなかった.
(※文責: 佐々木啓孝)
4.2 成果の評価
本プロジェクトにおいて,当初は前年度のプロジェクトで開発した筋電義手を,前期までに類似
したものを作ることで義手開発の技術を学んだ.しかし,当初の予定より作業が進んでいったた
め,前期では前年度成功したジャンケンの動作 (グー, チョキ, パー)に加え, 手首の屈曲・伸展動作
を可能とする筋電義手を開発した.しかし,信号処理の問題により, 動作識別が完全では無く, 時
折筋電義手が誤作動し,制御は不完全なものとなった.
後期では力の維持を行い, 卵のような力加減を要するものを持つことを目標にした. また, 人間の
腕に近い外観と軽量化を図り, プラスチック素材を用いた筋電義手の開発を目指した. 後期の最終
発表ではハード面の不具合がありながらも卵を摘むことに成功したが, 制御面で物を摘む, 摘む動
作と手首の屈曲・伸展動作の筋電位が類似しているため, 筋電義手の誤作動が多く起きた.
(※文責: 薬師寺尚也)
4.3 担当分担課題の評価
4.3.1 プロジェクト全体
筋電義手の仕様の策定
作成段階で何度か各班の考えている仕様とずれが生じていたが,毎回プロジェクト学習の時間が
終わった後,進捗状況の報告を行ったため解決した.特に筋電義手の動作の調整に時間がかかるた
め, 筋電義手製作と動作プログラムは発表の 1週間前までに完成させることを目標とした. 結果的
には, 1週間前には製作物が完成したため目標を達成できたと考える.
(※文責: 佐々木啓孝)
Group Report of 2012 SISP - 40 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
4.3.2 筋電義手制御班
信号計測部
計測対象とする筋肉の位置を特定し,その部分に表面電極を貼り付けた.最終発表では貼り付け
る位置を 16箇所決めなければならず,どこに貼り付けることでより識別しやすい筋電位が検出で
きるかが課題となった.結果として識別が可能な筋電位が検出することができたが,それでも完璧
に識別できたとは言えなかった. また, 実験段階で 5chでも識別可能だったことから改善の余地が
あることが分かった.今回, 物を掴む・摘む,手首の前後動作を制御するということが最終目標で
あり,特に物を掴む・摘む動作に関しては,前年度までのプロジェクトでは達成できていなかった.
この2つの動作を特に意識して電極を貼り付ける位置を決定した.この時,親指の動作が重要にな
ると予想したため長母指屈筋と短母指伸筋の筋電位を検出することにしたが,この2つの筋はあま
り大きいとは言えない上, 深層部にあるため表面筋電位の検出では正確に検出することは難しいと
思われた. 実験を行った結果, これらの筋電位を検出することが可能であった.
計測用電極付きサポーターの取り付けに関して手首部分はゆるくなりやすかったため更にサポー
ターを計測用電極付サポーターの上につけて電極を皮膚に貼り付けた.また,計測用電極付きサ
ポーターの内側には電極が密接に並んでおり,被験者の腕を圧迫する負担がかかっていた.5chで
も 16chでも識別が可能であり識別率もあまり変わらなかったため,電極の ch数に関してはもう少
し減らしても良いと考えられる.
(※文責: 薬師寺尚也)
信号処理部
動作毎の筋電位をサポートベクターマシン (SVM)を用いて PC上で学習させ動作識別を行った.
前期では, ジャンケンの動作 (グー, チョキ, パー)に加えて, 手首の屈曲, 伸展動作の計 5動作の識
別を成功させた. しかし, 電極の位置の違いや筋疲労により完全に識別できたとはいえなかった.
また, チョキの状態で小指と薬指の曲げ動作に力を入れるなど被験者側の筋力維持に対しての工夫
が多く見られた.
後期では, 力の制御を行って物を掴む, 摘む動作と手首の屈曲, 伸展動作をサポートベクターマシ
ン (SVM)を用いて行った. 物を感知したときの人間の触覚にあたる部分に圧力センサ, 指の曲げ
伸ばしのワイヤーの張力維持にはひずみゲージを用いた. これらのセンサから得られた信号で義手
を制御するための閾値を決めるために, 実験を繰り返し行った. その結果, 筋電義手が卵などの割れ
やすく一定の力を加えなければ持つことのできないものを掴むまたは摘むことに成功したが, 動作
の識別は前期と同様に誤作動が多く見られた.
(※文責: 薬師寺尚也)
4.3.3 佐々木啓孝
前期のプロジェクト学習では人手が足りない班, 人手が余る班があったがうまく分担して進める
ことができなかった.また, プロジェクトリーダとしての活動があまりなかったよう感じた.プロ
ジェクトリーダーとして主な活動といえば,各班の製作物に対する調整である.それは,各班の方
向性が間違った方向に進んでいないかを確認する仕事であった.このような事がから,後期のプロ
Group Report of 2012 SISP - 41 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
ジェクト学習では,課題として,人員が足りないところへ補助を行うことを挙げた.具体的には,
仕事が遅れることがあったら事前に増員として,自分が補助にまわるということである.この課題
を設定した理由としては,前期に期日に関する仕事が多かったため,期日を守ることの大切さを
知っていたからである.到達目標としては,期日を越えそうな班に事前にフォローアップを行い,
期日に間に合うように活動した.今後の課題として,プロジェクトリーダは,作業全般の知識を有
していたほうが良いと考える.また,そもそもそのようなバックアップを必要としない人員数の見
積もりをする能力が必要である.そのため,プロジェクトリーダは各班の活動に積極的に参加し,
徐々に知識を付けていくのが,良いと考えている.また,班員の情報共有を行う掲示板などを作る
と効率的に作業を行えると考える.
(※文責: 佐々木啓孝)
4.3.4 樋山貴洋
前期では, 去年度のプロジェクトのサポートベクターマシンを用いた動作識別用のプログラムを
理解し, 今年の中間発表で行った 5ch分の電極でジャンケンの動作(グー,チョキ,パー)と手首
の屈曲・伸展動作用にプログラムを書き換えることを行った. 最初の段階では, 去年度のプログラ
ムを参考に, 2ch分の電極で手首の伸展・屈曲動作を識別するプログラムに書き換え実験を行った.
手首の屈曲・伸展動作は比較的識別しやすく, 計測点も2つで最低限の個数で識別が可能であった.
そのため, 手首の屈曲・伸展動作のプログラムを作成することができれば, 動作数を増やしても動
作識別を行うことができるプログラムを作成できると考えた. 結果的には, 手首の屈曲・伸展動作
はほぼ 100%識別可能なプログラムを作成することができた. 次に 5ch分の電極数でジャンケンの
動作と手首の屈曲・伸展動作の計 5動作のプログラムを作成し, 実験を行った. 手首の屈曲・動作
のみと比べ, グーの動作と手首の屈曲動作など識別がうまくいかない事も多くあったが, 被験者側
で筋力の入れ方を工夫することで識別が可能となった. まとめると, 前期では筋電義手がジャンケ
ンの動作(グー,チョキ,パー)と手首の屈曲・伸展の計 5動作の識別に成功した.
後期は, 物を掴む・摘むと手首の屈曲・伸展の計 4動作を 16chの計測点から得られた信号をサ
ポートベクターマシンを用いて識別を行った. 前期の時点で 5動作分の識別プログラムを完成して
いたため, 後期での 4動作分のプログラムは容易に作成できた. しかし, 実験を行うと識別がうま
くいかず, 動作が不安定であった. それは, 筋疲労が原因ではあると考えられる. 前期でのジャンケ
ンの動作(グー, チョキ, パー), 手首の屈曲・伸展動作は動作する瞬間の筋電位を抽出することで
安定的な動作を可能にしたが, 後期での物を掴む・摘む, 手首の屈曲・伸展動作は長時間の筋電位
の違いからその動作の識別を行う必要がある. 長時間その動作を維持し続けると, 次第に筋疲労が
起こり, 別の識別と類似し識別がうまくいかなくなる. また, 長時間の筋力の維持は被験者の負担も
大きく, また最先端の研究でも表面筋電位で長時間の筋力維持の識別は難しいため動作識別に課題
が残る結果となった.
(※文責: 樋山貴洋)
4.3.5 薬師寺尚也
今回のプロジェクトにおいて筋電義手制作班として筋電義手を制御するための筋肉について調
査を中心に行った.筋電義手制作班に配属されて最初に行ったことは筋電義手を制御するための
Group Report of 2012 SISP - 42 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
プログラムについて学ぶことあった. 使用するプログラムも初めて扱うものだったため, 先輩の説
明にはより集中して学習した.初めに学んだ MPLAB と PIC では制御を行う事が難しいという
ことで他のプログラムを使うことになった. MPLABと PICの代わりに採用されたプログラムは
Arduinoでありこれは Processingも同時に使った. これらを用いて筋電義手の制御と被験者の筋
電位の学習を行うプログラムを行った.Processing は以前講義で使用していたため扱いやすい言
語でありわかりやすかった.Arduinoについても Processingと同じ言語であるためそこまで難し
いと感じなかった.6 月から,班の中での役割分担が決められ筋肉について調べることが多った.
また計測位置を決定する重要な仕事を任された.中間発表の時はジャンケンの動作(グー,チョ
キ,パー)と手首の前後動作の制御を行うための筋肉を調べ,5chという少ない ch数で制御を行う
ための筋肉を選び,正確に電極を貼り付ける必要があった.中間発表の成果として, 識別自体はう
まくいき,明確な特徴量を検出することができた.中間発表までの成果として上手くいったのでは
ないかと考えている.中間発表の後,最終発表に向けての目標やスケジュールを決定した.夏休み
中は筋肉についての知識を深めるため,筋肉についての辞典を購入して学習を行った.そのため,
中間発表では使用しなかった筋電義手の制御のための筋肉について詳しく知ることができた.後期
が始まってからは,プログラムの作成は他の筋電義手制御班の担当に任せ, 電極や回路などの制作
物が多い筋電義手計測班の手伝いを主に行った.慣れない作業で失敗もしたが,電極や回路の作成
についての知識を得て経験を積むことができた.他には,計測用電極付きサポーターの作成の際に
も被験者の腕から筋電位を計測する位置をチェックし,電極の貼り付ける場所を確定した.最終目
標は物の把持動作と手首の前後動作であり,16chという数だったため重要だと思われる筋の位置
に複数貼り付けそれぞれの動作に対して特徴量が検出されるような工夫をした.結果として識別す
ることが可能な特徴量を検出することができた.しかし,筋電義手の動作テストの時点で 5chで識
別可能である事がわかる. 16chでの識別率があまり変わらなかった事から表面筋電位において計
測位置が増えれば増えるほど識別が上がるわけではないと言う事が分かった.最終発表前の動作テ
ストではある程度識別できていたが本番では計測用電極付きサポーターのトラブルが原因で 5動作
の識別がうまくいかなかった. しかし, メインである物の把持動作の識別はしっかりすることがで
きた.最終目標である物の把持動作では親指の動作が重要になると考え, 筋電位が計測しにくいで
あろう深層の筋である長母指屈筋と短母指伸筋を計測に使った.これについては若干不安もあった
が, 特徴量を検出することができた.中間発表から 5chから 16chに増やして各動作の識別をより
正確にすることが最終発表の目標であったが,前述の通り 5chでも識別が可能で 16chにしてもあ
まり識別率が変わらなかった事から,計測値点を増やすことは識別率の上昇に繋がらないことが分
かった.来年度のプロジェクトでは,表面筋電位において最も識別率が高くなる状況を研究しても
らいたい.
(※文責: 薬師寺尚也)
4.3.6 玉川佳奈
前期では, 前半に制御についての勉強を行い, 後半からポスター・スライド制作を行なった. 使用
したことがなかった Illustratorや Photoshopを一から勉強し, 調べながら作業を行った. 初めは
文章入力など, 初歩的なことから始め, Illustratorに慣れることを試みた. しかし, なかなか使い慣
れず, イラスト制作になると, 1つのイラストを描くのに 6時間以上かかった, また, Photoshopを
使用して写真の背景を消すのにも 1時間以上かかるなど, ポスター・スライド制作は,とても時間
と根気がいる作業であった. しかし, 時間をかけた分, 自分なりに満足のいく制作物ができたと感
Group Report of 2012 SISP - 43 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
じている. 反省点は, スライド用に制作した図やイラストに不備が多く, スライド制作で使用した
OpenOfficeで, 不備を修正した点である.
後期では, 前半に計測用電極付きサポーターの製作を行った. 電極を取替えやすくするため, サ
ポーターの内側を広げられるような設計を考え, ただ計測することだけを考えて製作するのではな
く, 今後のメンテナンスのことも考えて製作した. 実際に完成したサポーターを計測に使用すると,
正確に計測できないことが多々あった. 原因としては, 電極と腕との間に隙間ができていること, 電
極の銀板が導電布に触れてしまっていることが挙げられた. その都度, サポーターのサイズを小さ
くして腕と電極の隙間をなくしたり, 電極と導電布の間に布を挟むことで銀板と導電布が触れない
ようにするなど, 問題を解決した. 最終的には製作したサポータを使用して義手を動かせることが
できたので, 完璧までとはいかないが, よかったと感じている. 反省点は, 一人の被験者専用に設計
してしまったために, 他の人に使用できない点と, 電極と腕との間に何箇所か隙間ができ, 正確に
計測できない chが複数あった点である. 後半のポスター・スライド制作は, 前期で Illustratorや
Photoshopを使用していたこともあり, ソフトの使い方については慣れていた. そのため, 前期ほ
ど時間はかからず制作が行えた. 最終ポスターでは, アイキャッチャーを意識して制作を行い, 結果
的に中間発表の時よりも, 足を止めてポスターを見てくれる人が増えたので, 良かったと感じてい
る. 反省点は, 計4枚のポスターを2名で制作しが, それぞれ単独にポスター制作を行ったために,
制作者によって若干仕様が異なってしまった点である. 結果, 全体的な統一感に欠けてしまった.
(※文責: 玉川佳奈)
Group Report of 2012 SISP - 44 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
第 5 章 今後の課題と展望
本プロジェクトは, 前期で行ったジャンケンの動作 (グー, チョキ, パー)と手首の屈曲, 伸展動作
を応用して, 力の制御によりチョキの動作をモノを摘む動作, グーの状態を物を掴む動作を実現に
変更し, 識別を行った. 動作識別において, 未知のデータに対して高い識別率を持つサポートベク
ターマシン (SVM)で動作の学習を行った. しかし, 被験者の疲労によって誤認識が多く起きたた
め, 完全に識別できたとはいえなかった また, 前期は 5ch分の電極数であったため, 後期では 16ch
分と計測点を増やし各動作の学習を行ったが, 正しく電極が腕に設置できていなかった問題などで
識別率が上がることはなかった.
今後の課題としては, 各動作においてどこの筋肉が重点的に働くのか特定する必要があると考え
られる. 今回のプロジェクトで用いた電極は直径1 cm台の大きさであるが, この電極の直径を小
さくしたものを用いることで個々の筋肉からの筋電位を導出できると考える. しかし, 腕の筋肉は
身体の深部まで絡み合っているため, 一つの動作を行う時に複数の筋活動が同時に起こるとされる.
そのため, 個々の筋肉を同定することは難しいが, 敢えて表層筋と深層筋が合成された筋活動を利
用することも一つの方法である. また, サポートベクターマシンのパラメータを変える方法により
識別率を上げることも可能であり, 識別は生理学的な観点と数理的な観点の両方で考える必要が
ある.
(※文責: 樋山貴洋)
Group Report of 2012 SISP - 45 - Group Number 25-C

Biological Information for Social Welfare ~Development of Myoelectric hand~
参考文献
[1] (株)大紀元 : 米復員軍人に光明をもたらす「バイオニック・ウーマン」の誕生, 2006. Software
available at ”http://www.epochtimes.jp/jp/2006/09/print/prt d16316.html” (Last Access
: Des, 24th, 2012).
[2] touchbionics: i-limb ultra, Software available at ”http://www.touchbionics.com/products/active-
prostheses/i-limb-ultra/” (Last Access : Des, 24th, 2012).
[3] 吉川雅博, 三田友記, 三河正彦, 田中和世:前腕切断者を対象とした筋電位信号に基づく手の動作
識別法に関する基礎研究, 人間工学, Vol46.No.3, 197-207
[4] 腰痛治療ナビ [外伝], ”http://kinniku.koshinavi.net”(Last Access : Jan, 14th, 2013)
[5] Takehi Ando, Misato Nihei, Masakatsu G.Fujie, ”Estimation of Rotator Cuff Activity
Using a Surface EMG during Shoulder External Rotation”, IEEE, 1634-1638, 2006
[6] 阿部重夫著 : パターン認識のためのサポートベクトルマシン入門, 森北出版株式会社, 2011
[7] Chih-Chung Chang and Chih-jen Lin, LIBSVM : a library forsupport vector machines,
2001. Software available at ”http://www.csie.ntu.edu.tw/˜ cjlin/libsvm” (Last Access :
Jul, 16th, 2012).
[8] 新村達, 秋田純一, 櫻沢繁, 戸田真志:導電性衣服のシールド効果と電源供給機能を用いた高精度
多点表面筋電位測定システム, 情報処理学会, 3374-3792, Dec.2007
Group Report of 2012 SISP - 46 - Group Number 25-C