dynamique des sol 2
DESCRIPTION
cours ENIT TunisieTRANSCRIPT

Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Dynamique des Sols.
Sommaire.
Chapitre Introductif;
Caractérisation du mouvement sismique: Éléments de sismologie;
Comportement des sols sous chargement cyclique;
Mesure des caractéristiques dynamiques des sols.
Réponse sismique d’un dépôt de sol: Effet de site sismique;
Perte de capacité portante et Liquéfaction;
Interaction Sol-Structure (en construction).
Dynamique des Sols/ N.B.Romdhane 1
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Chapitre I.
Caractérisation du mouvement sismique : Eléments de sismologie.
Les chargements dynamiques considérés dans ce cours seront exclusivement des sollicitations sismiques.
L’estimation du mouvement sismique en un site donné est l’étape première dans un projet d’ingénierie
parasismique. Cette étape fait appel à des disciplines diverses et variées : la géologie, l’histoire, la géotechnique,
la géophysique, les statistiques, etc. On trouvera ci-après quelques notions de tectonique et de sismologie de
« base », nécessaires pour une meilleure compréhension (qui ne sera jamais complète, compte tenu de la
complexité des phénomènes en jeu) du mouvement sismique et de l’influence de la géologie environnante.
1.1 Notions sur la tectonique des Plaques.
La structure du globe. Très longtemps, on a pensé que la terre est une sphère (ou plus précisément un ellipsoïde
aplati aux pôles) de composition homogène, constituée d’un matériau unique. En début du 20ème siècle, le
géophysicien Mohorovicic a enregistré, pour un même séisme, deux arrivées successives d’ondes. L’explication
qui lui vient est la suivante : lors du séisme, deux ondes ont été libérées au même instant mais ont emprunté deux
trajets différents : un trajet direct à la surface du sol et l’autre réfracté ou réfléchi sur une surface séparant deux
milieux de natures différentes. La terre n’est donc pas une sphère homogène ; s’il en était ainsi, les ondes
suivraient des trajectoires rectilignes directes et on enregistrerait une seule onde.
De nombreuses autres observations, basées sur des sismogrammes, ont amené à une meilleure connaissance de la
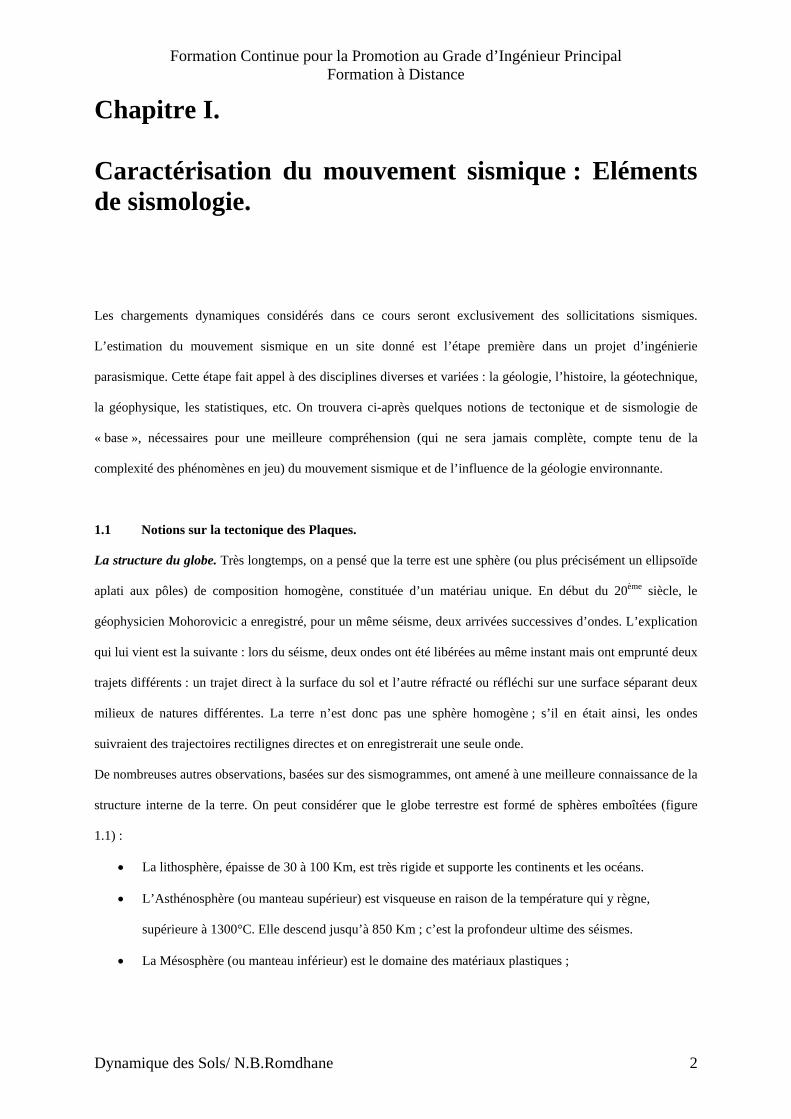
structure interne de la terre. On peut considérer que le globe terrestre est formé de sphères emboîtées (figure
1.1) :
• La lithosphère, épaisse de 30 à 100 Km, est très rigide et supporte les continents et les océans.
• L’Asthénosphère (ou manteau supérieur) est visqueuse en raison de la température qui y règne,
supérieure à 1300°C. Elle descend jusqu’à 850 Km ; c’est la profondeur ultime des séismes.
• La Mésosphère (ou manteau inférieur) est le domaine des matériaux plastiques ;
Dynamique des Sols/ N.B.Romdhane 2
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
• Enfin, le noyau externe est fluide (il n’est pas traversé par les ondes de cisaillement) ; le noyau interne
(ou graine) est, quant à lui dense, composé de Nickel et de fer d’où le qualificatif de Nifer.
Figure 1.1 : La structure du globe.
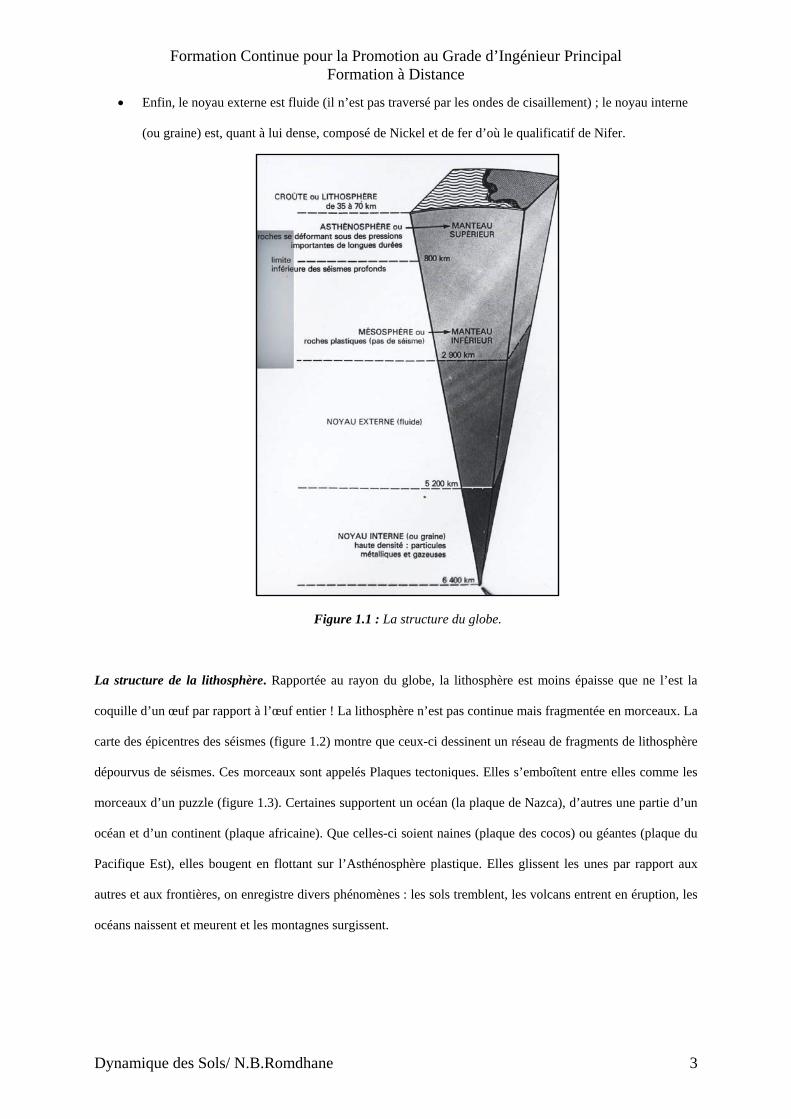
La structure de la lithosphère. Rapportée au rayon du globe, la lithosphère est moins épaisse que ne l’est la
coquille d’un œuf par rapport à l’œuf entier ! La lithosphère n’est pas continue mais fragmentée en morceaux. La
carte des épicentres des séismes (figure 1.2) montre que ceux-ci dessinent un réseau de fragments de lithosphère
dépourvus de séismes. Ces morceaux sont appelés Plaques tectoniques. Elles s’emboîtent entre elles comme les
morceaux d’un puzzle (figure 1.3). Certaines supportent un océan (la plaque de Nazca), d’autres une partie d’un
océan et d’un continent (plaque africaine). Que celles-ci soient naines (plaque des cocos) ou géantes (plaque du
Pacifique Est), elles bougent en flottant sur l’Asthénosphère plastique. Elles glissent les unes par rapport aux
autres et aux frontières, on enregistre divers phénomènes : les sols tremblent, les volcans entrent en éruption, les
océans naissent et meurent et les montagnes surgissent.
Dynamique des Sols/ N.B.Romdhane 3
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Figure 1.2. Carte des épicentres.
Figure 1.3. Carte des plaques tectoniques.
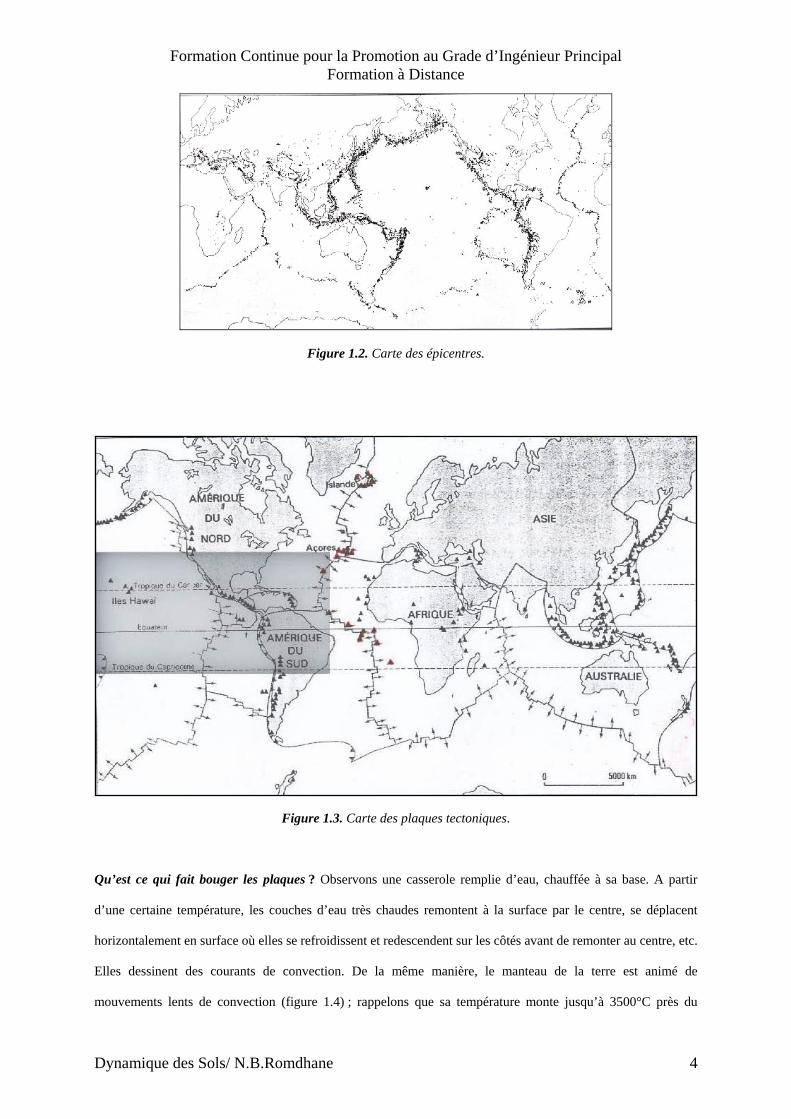
Qu’est ce qui fait bouger les plaques ? Observons une casserole remplie d’eau, chauffée à sa base. A partir
d’une certaine température, les couches d’eau très chaudes remontent à la surface par le centre, se déplacent
horizontalement en surface où elles se refroidissent et redescendent sur les côtés avant de remonter au centre, etc.
Elles dessinent des courants de convection. De la même manière, le manteau de la terre est animé de
mouvements lents de convection (figure 1.4) ; rappelons que sa température monte jusqu’à 3500°C près du
Dynamique des Sols/ N.B.Romdhane 4
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
noyau et descend à 15°C à la surface de la terre : la matière chaude remonte, la froide descend. Ce phénomène
est le moteur du mouvement des plaques.
Figure 1.4. Les courants de convection.
Le mouvement des plaques est de deux types : l’Accrétion et la Subduction.
L’accrétion est un mouvement qui prend place au niveau des dorsales ou rifts. La dorsale est une déchirure de la
croûte ; à l’origine, une zone anormalement chaude provoque la formation d’une poche de magma au sommet du
manteau, à la base d’une croûte peu épaisse (~ 20 à 40 Km)). Cette poche de magma visqueux soulève et déchire
la croûte terrestre (figures 1.5-a à 1.5-c). Ce processus se poursuivant, le magma va s’évacuer de deux manières :
(1) une partie pénètre dans les fractures de la croûte et s’épanche à la surface pour donner des coulées de lave et
des volcans et, (2) une autre partie glisse latéralement sous la croûte terrestre. De nouvelles fractures
apparaissent, des compartiments s’effondrent et le processus est accéléré ; ce phénomène est en cours, à l’est de
l’Afrique, dans le Rift Valley où le continent africain est en cours de se fendre pour donner naissance à un océan.
Dynamique des Sols/ N.B.Romdhane 5
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
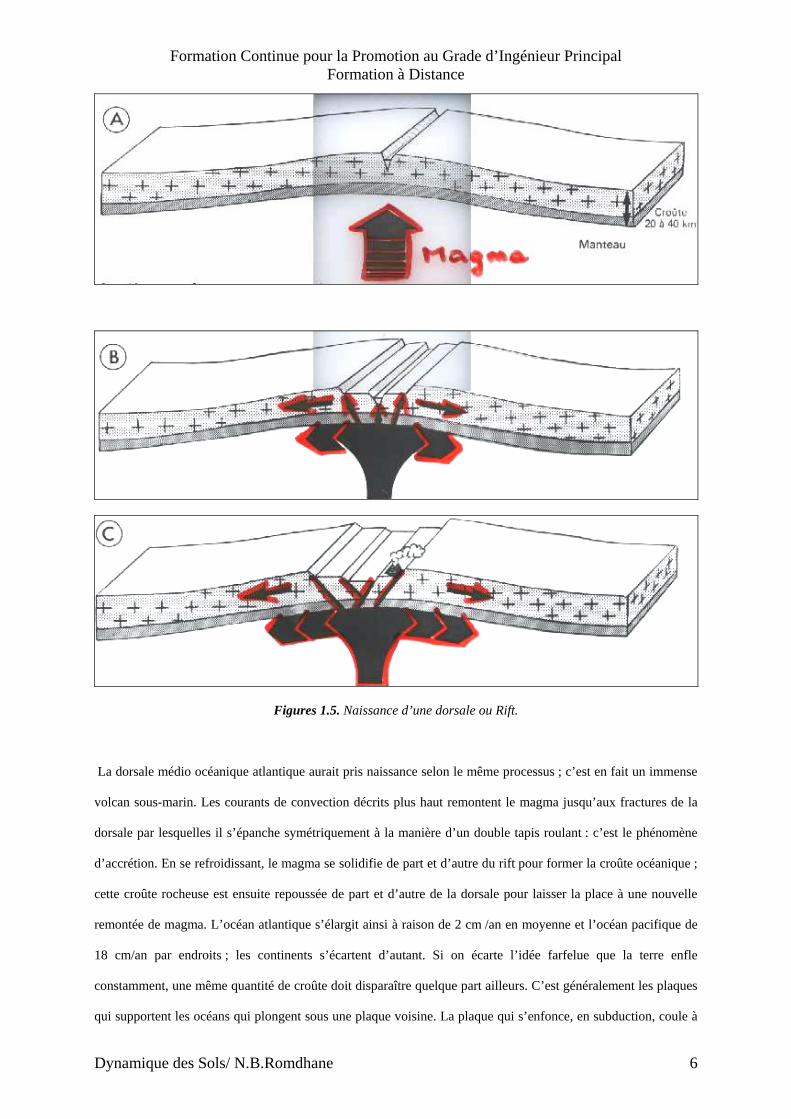
Figures 1.5. Naissance d’une dorsale ou Rift.
La dorsale médio océanique atlantique aurait pris naissance selon le même processus ; c’est en fait un immense
volcan sous-marin. Les courants de convection décrits plus haut remontent le magma jusqu’aux fractures de la
dorsale par lesquelles il s’épanche symétriquement à la manière d’un double tapis roulant : c’est le phénomène
d’accrétion. En se refroidissant, le magma se solidifie de part et d’autre du rift pour former la croûte océanique ;
cette croûte rocheuse est ensuite repoussée de part et d’autre de la dorsale pour laisser la place à une nouvelle
remontée de magma. L’océan atlantique s’élargit ainsi à raison de 2 cm /an en moyenne et l’océan pacifique de
18 cm/an par endroits ; les continents s’écartent d’autant. Si on écarte l’idée farfelue que la terre enfle
constamment, une même quantité de croûte doit disparaître quelque part ailleurs. C’est généralement les plaques
qui supportent les océans qui plongent sous une plaque voisine. La plaque qui s’enfonce, en subduction, coule à
Dynamique des Sols/ N.B.Romdhane 6

Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
700 Km de profondeur dans le manteau qui la désagrège et la fait fondre. La figure 6 représente une coupe de la
zone de subduction Chili-Pérou. Les points noirs représentent les hypocentres de séismes profonds. Le
mouvement de subduction de la Plaque de Nazca sous la plaque sud-américaine s’accompagne de nombreux
tremblements de terre, souvent violents.
Figure 1.6. La zone de subduction Chili-Pérou.
Dynamique des Sols/ N.B.Romdhane 7
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
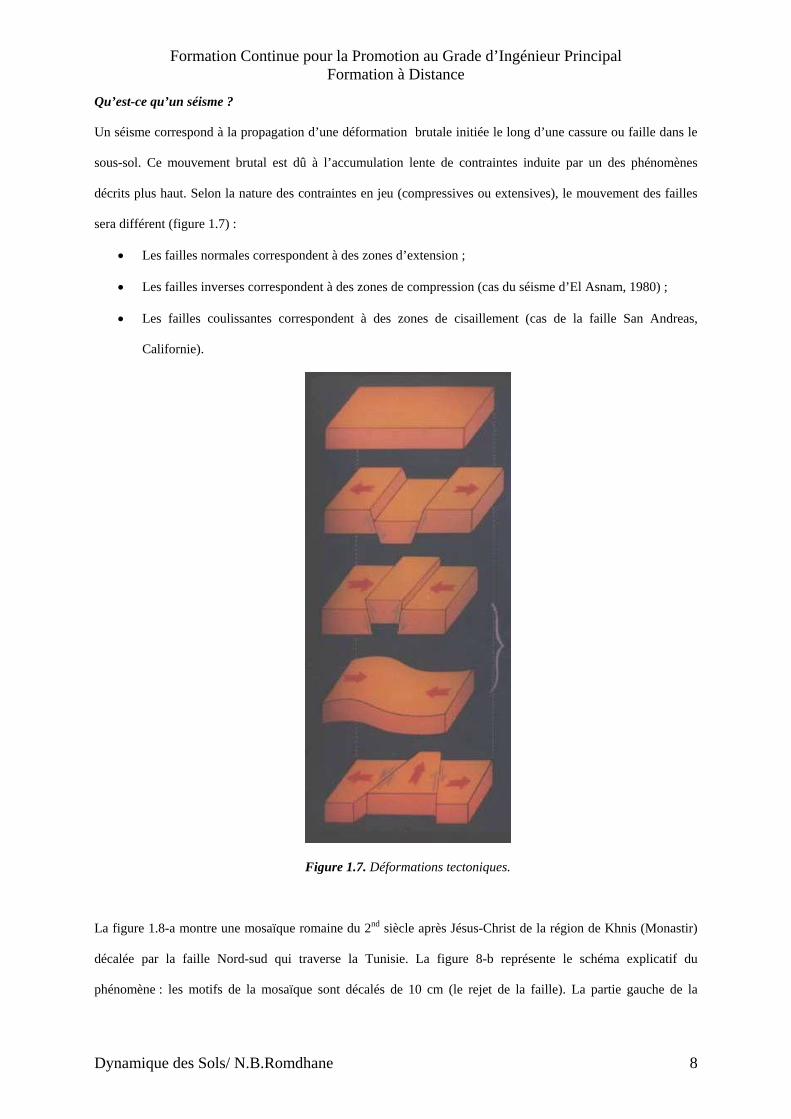
Qu’est-ce qu’un séisme ?
Un séisme correspond à la propagation d’une déformation brutale initiée le long d’une cassure ou faille dans le
sous-sol. Ce mouvement brutal est dû à l’accumulation lente de contraintes induite par un des phénomènes
décrits plus haut. Selon la nature des contraintes en jeu (compressives ou extensives), le mouvement des failles
sera différent (figure 1.7) :
• Les failles normales correspondent à des zones d’extension ;
• Les failles inverses correspondent à des zones de compression (cas du séisme d’El Asnam, 1980) ;
• Les failles coulissantes correspondent à des zones de cisaillement (cas de la faille San Andreas,
Californie).
Figure 1.7. Déformations tectoniques.
La figure 1.8-a montre une mosaïque romaine du 2nd siècle après Jésus-Christ de la région de Khnis (Monastir)
décalée par la faille Nord-sud qui traverse la Tunisie. La figure 8-b représente le schéma explicatif du
phénomène : les motifs de la mosaïque sont décalés de 10 cm (le rejet de la faille). La partie gauche de la
Dynamique des Sols/ N.B.Romdhane 8
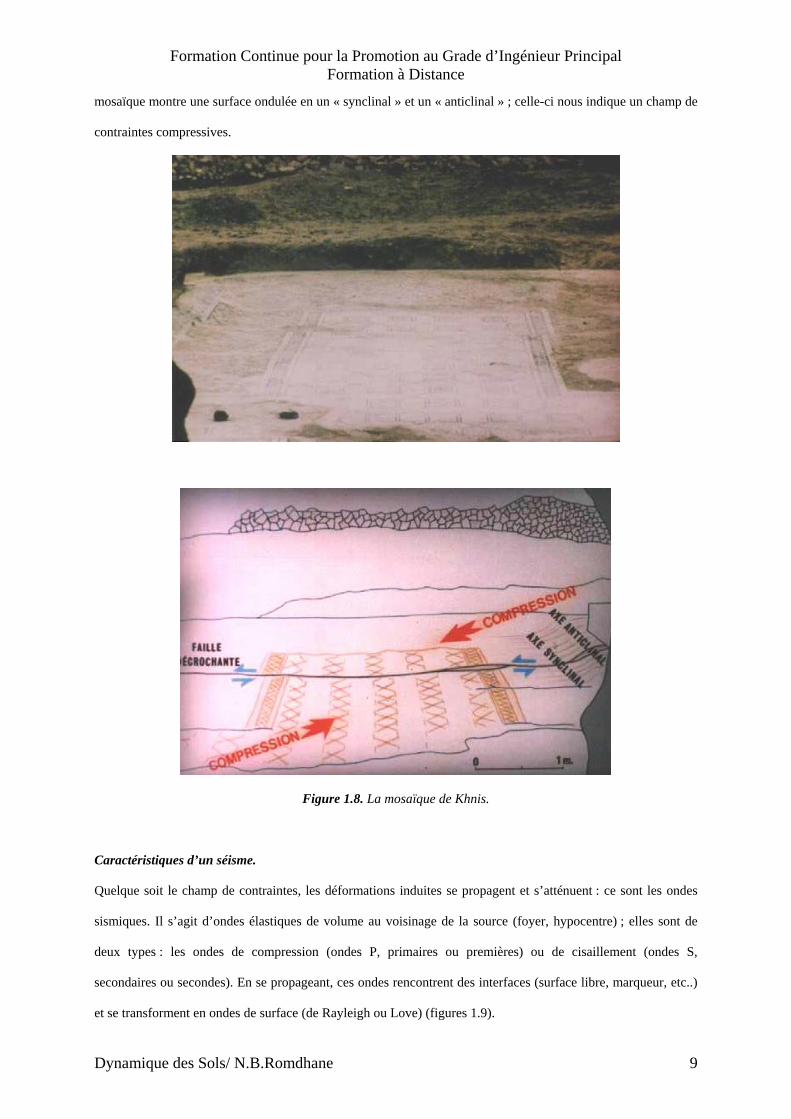
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
mosaïque montre une surface ondulée en un « synclinal » et un « anticlinal » ; celle-ci nous indique un champ de
contraintes compressives.
Figure 1.8. La mosaïque de Khnis.
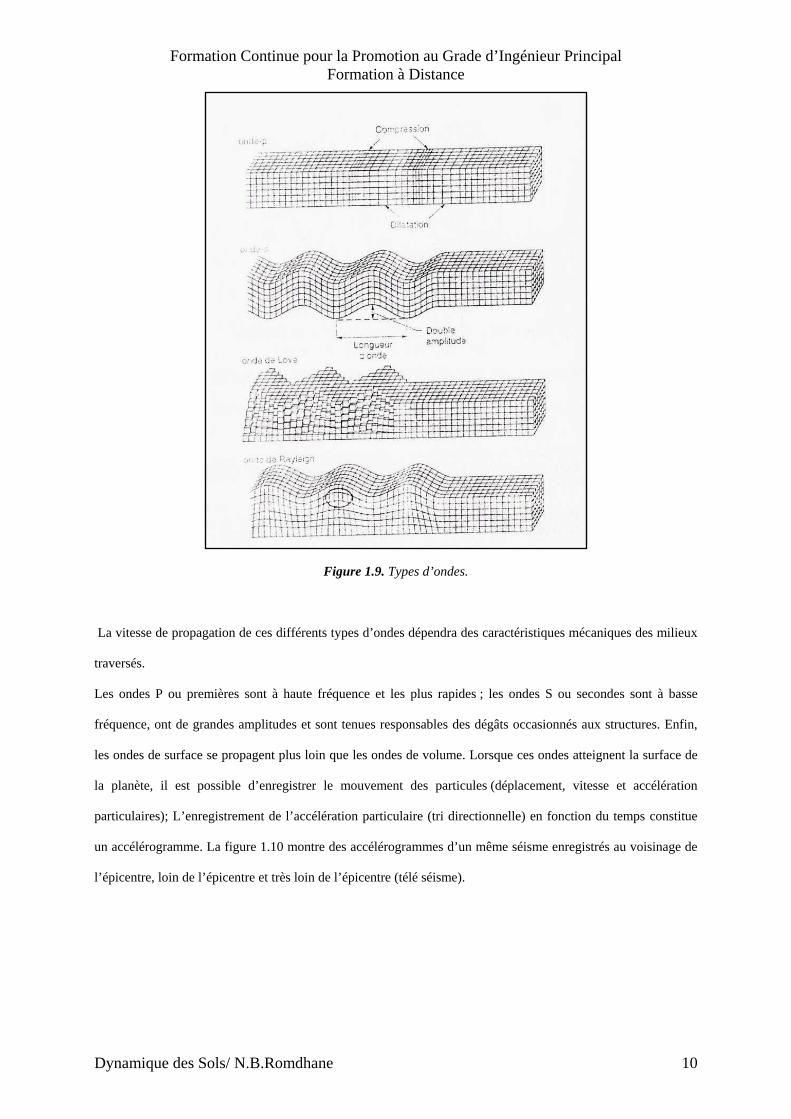
Caractéristiques d’un séisme.
Quelque soit le champ de contraintes, les déformations induites se propagent et s’atténuent : ce sont les ondes
sismiques. Il s’agit d’ondes élastiques de volume au voisinage de la source (foyer, hypocentre) ; elles sont de
deux types : les ondes de compression (ondes P, primaires ou premières) ou de cisaillement (ondes S,
secondaires ou secondes). En se propageant, ces ondes rencontrent des interfaces (surface libre, marqueur, etc..)
et se transforment en ondes de surface (de Rayleigh ou Love) (figures 1.9).
Dynamique des Sols/ N.B.Romdhane 9
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Figure 1.9. Types d’ondes.
La vitesse de propagation de ces différents types d’ondes dépendra des caractéristiques mécaniques des milieux
traversés.
Les ondes P ou premières sont à haute fréquence et les plus rapides ; les ondes S ou secondes sont à basse
fréquence, ont de grandes amplitudes et sont tenues responsables des dégâts occasionnés aux structures. Enfin,
les ondes de surface se propagent plus loin que les ondes de volume. Lorsque ces ondes atteignent la surface de
la planète, il est possible d’enregistrer le mouvement des particules (déplacement, vitesse et accélération
particulaires); L’enregistrement de l’accélération particulaire (tri directionnelle) en fonction du temps constitue
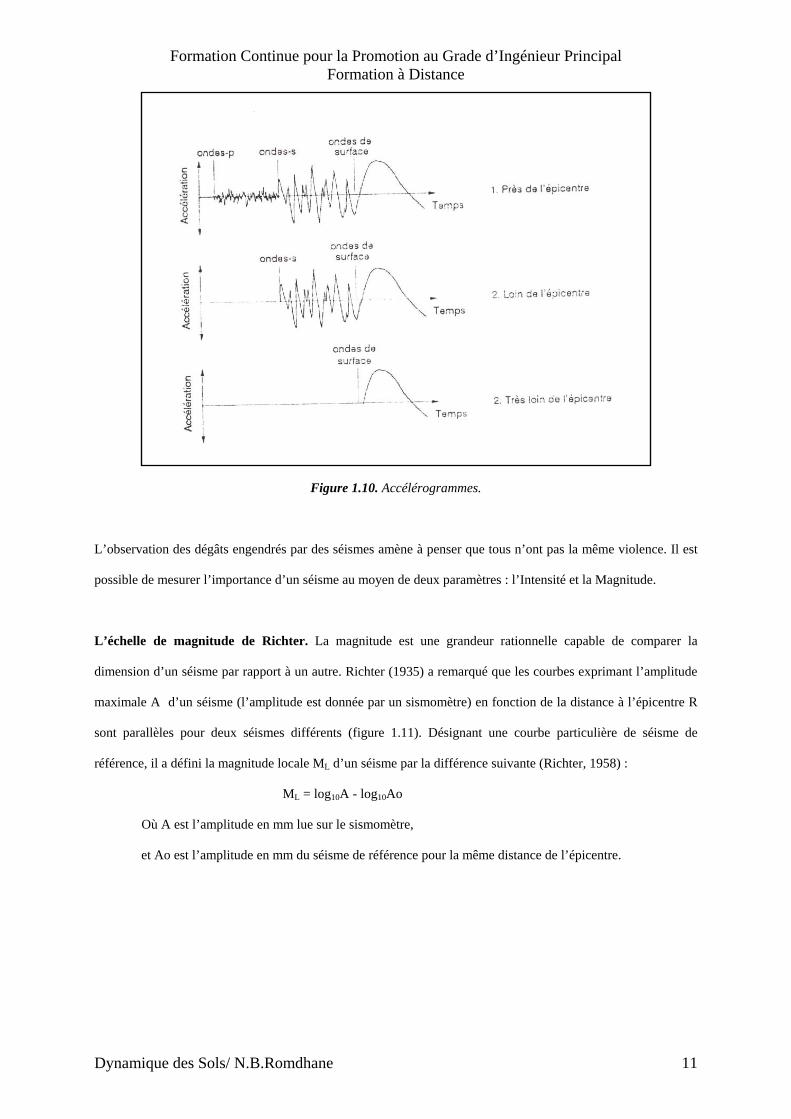
un accélérogramme. La figure 1.10 montre des accélérogrammes d’un même séisme enregistrés au voisinage de
l’épicentre, loin de l’épicentre et très loin de l’épicentre (télé séisme).
Dynamique des Sols/ N.B.Romdhane 10
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Figure 1.10. Accélérogrammes.
L’observation des dégâts engendrés par des séismes amène à penser que tous n’ont pas la même violence. Il est
possible de mesurer l’importance d’un séisme au moyen de deux paramètres : l’Intensité et la Magnitude.
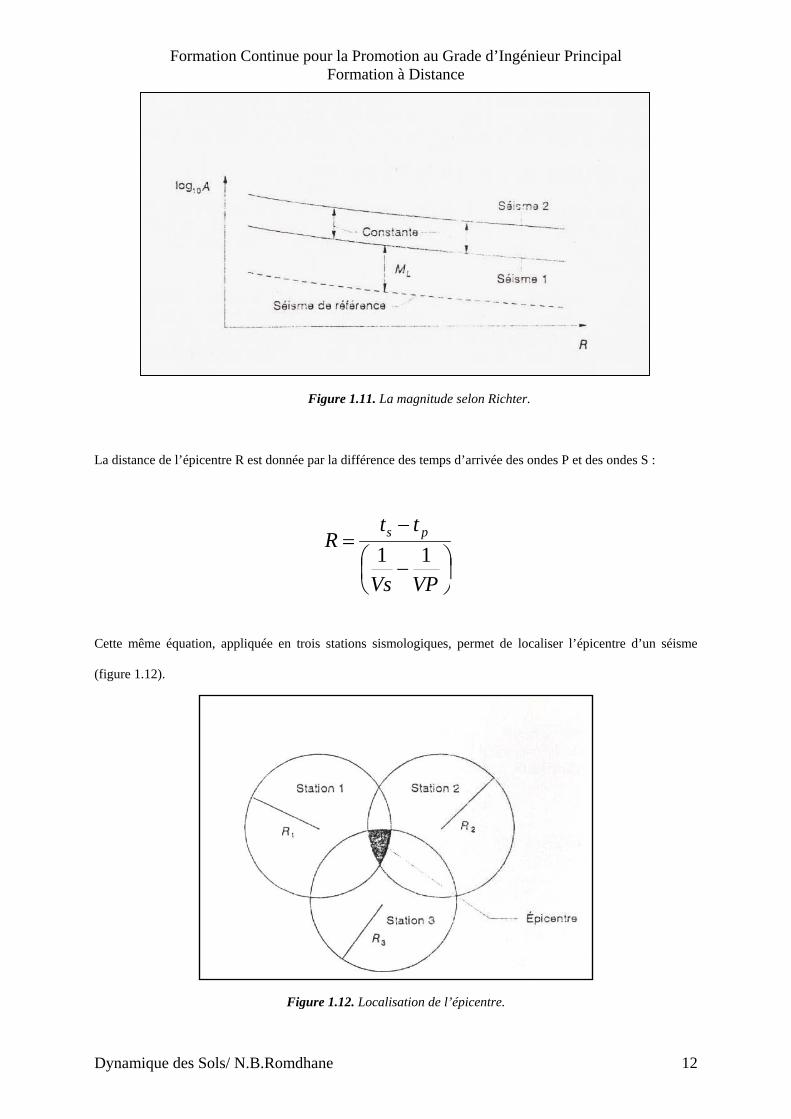
L’échelle de magnitude de Richter. La magnitude est une grandeur rationnelle capable de comparer la
dimension d’un séisme par rapport à un autre. Richter (1935) a remarqué que les courbes exprimant l’amplitude
maximale A d’un séisme (l’amplitude est donnée par un sismomètre) en fonction de la distance à l’épicentre R
sont parallèles pour deux séismes différents (figure 1.11). Désignant une courbe particulière de séisme de
référence, il a défini la magnitude locale ML d’un séisme par la différence suivante (Richter, 1958) :
ML = log10A - log10Ao
Où A est l’amplitude en mm lue sur le sismomètre,
et Ao est l’amplitude en mm du séisme de référence pour la même distance de l’épicentre.
Dynamique des Sols/ N.B.Romdhane 11
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Figure 1.11. La magnitude selon Richter.
La distance de l’épicentre R est donnée par la différence des temps d’arrivée des ondes P et des ondes S :
⎟⎠⎞
⎜⎝⎛ −
−=
VPVs
ttR ps
11
Cette même équation, appliquée en trois stations sismologiques, permet de localiser l’épicentre d’un séisme
(figure 1.12).
Figure 1.12. Localisation de l’épicentre.
Dynamique des Sols/ N.B.Romdhane 12
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
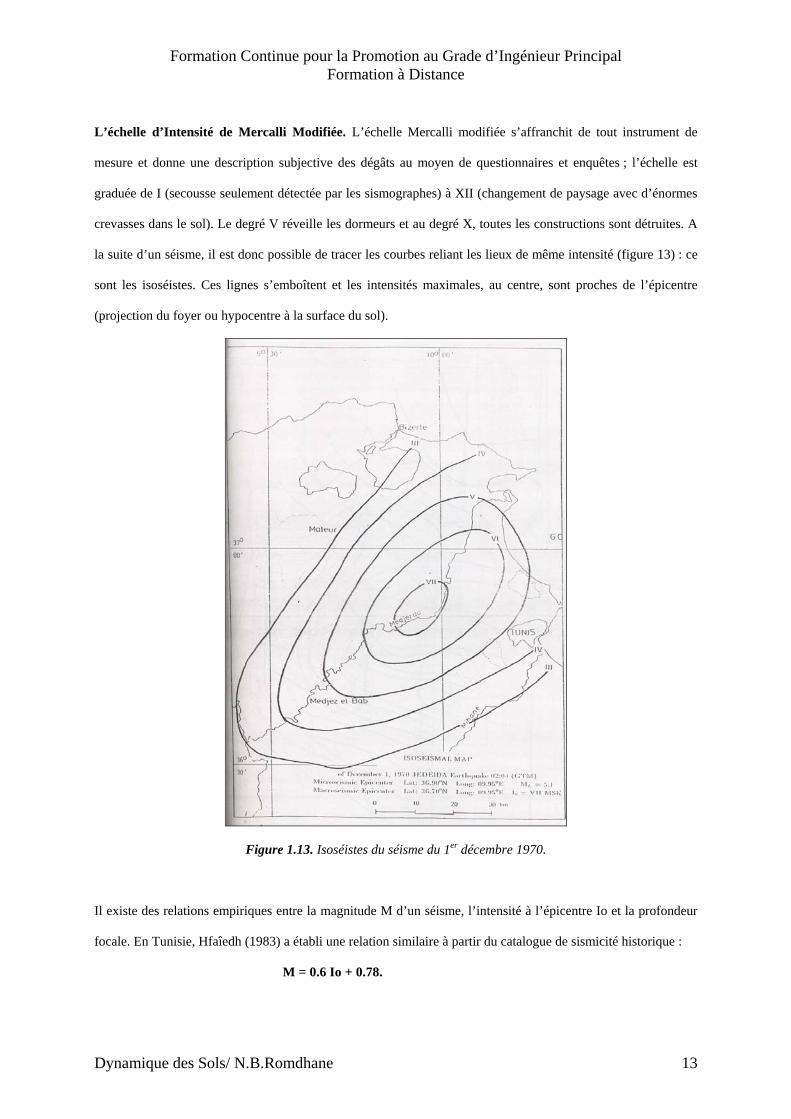
L’échelle d’Intensité de Mercalli Modifiée. L’échelle Mercalli modifiée s’affranchit de tout instrument de
mesure et donne une description subjective des dégâts au moyen de questionnaires et enquêtes ; l’échelle est
graduée de I (secousse seulement détectée par les sismographes) à XII (changement de paysage avec d’énormes
crevasses dans le sol). Le degré V réveille les dormeurs et au degré X, toutes les constructions sont détruites. A
la suite d’un séisme, il est donc possible de tracer les courbes reliant les lieux de même intensité (figure 13) : ce
sont les isoséistes. Ces lignes s’emboîtent et les intensités maximales, au centre, sont proches de l’épicentre
(projection du foyer ou hypocentre à la surface du sol).
Figure 1.13. Isoséistes du séisme du 1er décembre 1970.
Il existe des relations empiriques entre la magnitude M d’un séisme, l’intensité à l’épicentre Io et la profondeur
focale. En Tunisie, Hfaîedh (1983) a établi une relation similaire à partir du catalogue de sismicité historique :
M = 0.6 Io + 0.78.
Dynamique des Sols/ N.B.Romdhane 13
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
1.2 Caractéristiques sismiques pour l’analyse structurale.
Introduction. Dimensionner un ouvrage selon les règles parasismiques revient à un calcul dynamique des
sollicitations qui lui sont appliquées dans le temps, les contraintes en découlant. Ce calcul se fait au moyen d'une
analyse modale et/ou transitoire qui prend en compte, outre la modélisation de la structure, du sol et de
l'interaction sol-structure, d'une excitation dynamique, c'est-à-dire, d'un chargement sismique. La donnée la plus
immédiate pour décrire le chargement sismique est l'accélérogramme d'un point de la surface du sol de
fondation, c'est-à-dire l'enregistrement de l'accélération en fonction du temps selon ses trois composantes.
Une autre pratique remplace ce chargement temporel par sa représentation fréquentielle ou spectre de réponse.
Celui-ci donne les réponses maximales, dans chaque mode, d’un système à un degré dynamique sollicité par un
séisme donné. Pour un site donné, l’idéal serait que le spectre de calcul soit l’enveloppe d’un ensemble de
spectres calculés à partir d’accélérogrammes conséquents mesurés sur le site lui-même.
1.2.1 Les caractéristiques sismiques dommageables. Trois caractéristiques sismiques peuvent causer des
dommages à une structure : l’amplitude du mouvement du sol, la durée du séisme et le contenu fréquentiel de
l’accélérogramme.
• Les normes sismiques caractérisent l’amplitude du séisme par l’accélération maximale atteinte au sol :
amax. On peut lui préférer la moyenne pondérée de l’amplitude de l’ensemble de l’accélérogramme ou
accélération RMS (Root Mean Square) : aRMS = ∫0
0
2
0)(1 t
dttat
• La durée du séisme considérée en génie parasismique est celle qui cause des dommages structuraux
importants ; une méthode directe la définie comme le temps entre la première et la dernière accélération
supérieur à une valeur arbitraire, généralement 0.05g. Une autre méthode (Dobry et Idriss, 1978)
consiste à définir la durée d’un séisme par le temps nécessaire à l’emmagasiner de 5 à 95% de l’énergie
de l’accélérogramme.
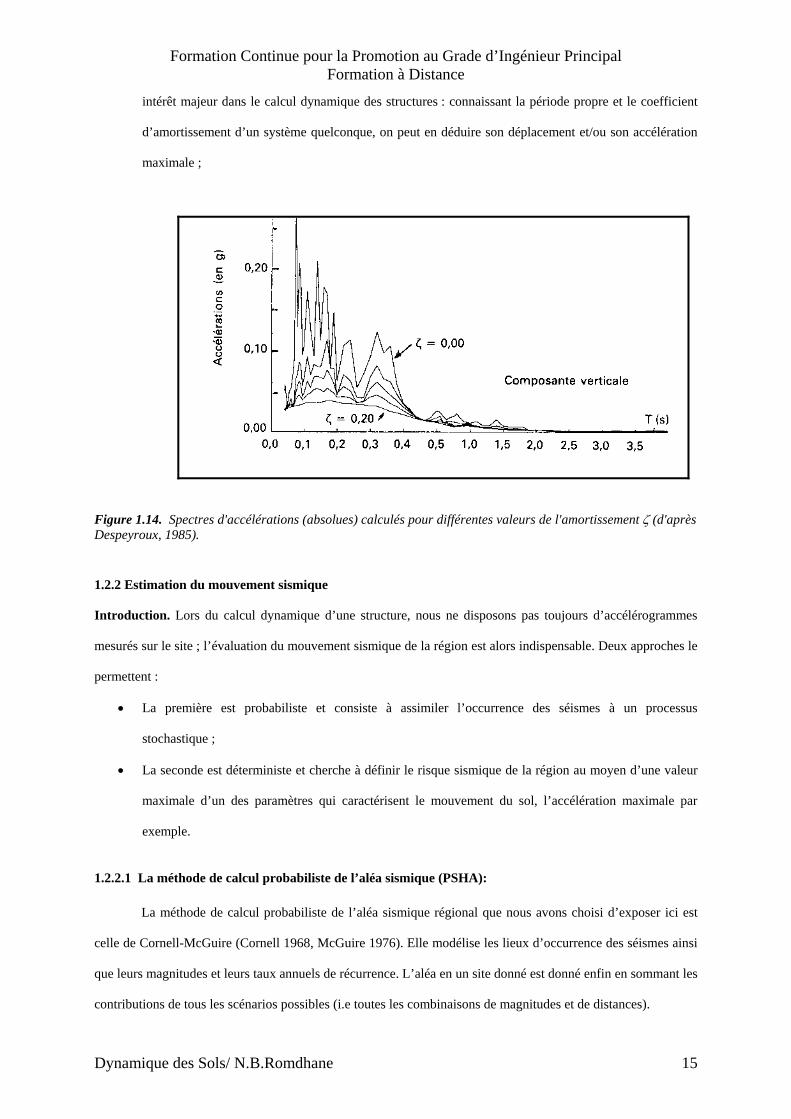
• Le contenu fréquentiel d’un accélérogramme peut être estimé (par exemple) au moyen d’un spectre de
réponse de l’accélérogramme. Le spectre de réponse est la réponse, dans le domaine spectral, d’un
oscillateur simple soumis à l’accélérogramme (figure 1.14). Le calcul dynamique d’une structure à
plusieurs degrés de liberté et plusieurs masses se ramène à l’étude d’un nombre d’oscillateurs simples
équivalents, caractérisés chacun par une période propre T et un coefficient d’amortissement ξ. La
réponse de la structure est la résultante des réponses de ces oscillateurs. Le spectre de réponse a donc un
Dynamique des Sols/ N.B.Romdhane 14
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
intérêt majeur dans le calcul dynamique des structures : connaissant la période propre et le coefficient
d’amortissement d’un système quelconque, on peut en déduire son déplacement et/ou son accélération
maximale ;
Figure 1.14. Spectres d'accélérations (absolues) calculés pour différentes valeurs de l'amortissement ζ (d'après Despeyroux, 1985).
1.2.2 Estimation du mouvement sismique
Introduction. Lors du calcul dynamique d’une structure, nous ne disposons pas toujours d’accélérogrammes
mesurés sur le site ; l’évaluation du mouvement sismique de la région est alors indispensable. Deux approches le
permettent :
• La première est probabiliste et consiste à assimiler l’occurrence des séismes à un processus
stochastique ;
• La seconde est déterministe et cherche à définir le risque sismique de la région au moyen d’une valeur
maximale d’un des paramètres qui caractérisent le mouvement du sol, l’accélération maximale par
exemple.
1.2.2.1 La méthode de calcul probabiliste de l’aléa sismique (PSHA):
La méthode de calcul probabiliste de l’aléa sismique régional que nous avons choisi d’exposer ici est
celle de Cornell-McGuire (Cornell 1968, McGuire 1976). Elle modélise les lieux d’occurrence des séismes ainsi
que leurs magnitudes et leurs taux annuels de récurrence. L’aléa en un site donné est donné enfin en sommant les
contributions de tous les scénarios possibles (i.e toutes les combinaisons de magnitudes et de distances).
Dynamique des Sols/ N.B.Romdhane 15
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
1.2.2.1.1. Principe théorique de l’estimation de l’aléa :
L’estimation de l’aléa sismique probabiliste en un site donné revient à déterminer les taux annuels
d’occurrence des paramètres de mouvement du sol tels que l’accélération, la vitesse et le déplacement. Le
paramètre le plus utilisé par les ingénieurs pour caractériser ce mouvement est le pic d’accélération (PGA :peak
ground acceleration). Cependant, la vitesse et le déplacement et même l’intensité peuvent également caractériser
le mouvement.
Pour effectuer de telles estimations, trois étapes préliminaires sont nécessaires :
• Identifier l’emplacement géographique des zones sources sismogènes dans la région d’étude et
ceci à partir de considérations géologiques et du catalogue sismique,
• Pour chacune de ces zones, il faut modéliser une courbe de récurrence en se basant sur le
catalogue sismique. Plus le catalogue contient une plage de données larges, meilleure est
l’estimation de la récurrence. Les courbes de récurrence décrivent ainsi les magnitudes
possibles et leurs taux annuels d’occurrence,
• Choisir une loi d’atténuation du mouvement de sol adaptée à la région d’étude :pour scénario
donné (magnitude et distance), elle fournit l’accélération engendrée à un site donné,
Le taux annuel de dépassement τA* d’une accélération cible A* est alors formulé de la façon
suivante :
∫∑ ∫ >==
=
= rRiMirm
N
i
MM
MMi drdmrfmfAAPA .).().(].*[ ,
1
max
min* ττ
où :
τi est le taux annuel de séismes de magnitudes supérieures ou égale à Mmin pour une zone source i,
fMi(m) et fRi(r) sont les fonctions de densité de probabilité en magnitude et distance de la source i, elles
sont supposées indépendantes.
P[A>A*|m,r] est la probabilité qu’un séisme de magnitude m à la distance r du site engendre une
accélération supérieure à A*, cette probabilité est calculée à partir de la relation d’atténuation,
N est le nombre de zones sources.
On calcule ensuite les taux annuels de dépassement d’une série d’accélérations cibles et on trace la
courbe d’aléa. Les résultats de l’estimation probabiliste se présentent en terme d’accélérations pour
différentes périodes de retour obtenus par interpolation de la courbe d’aléa.
Dynamique des Sols/ N.B.Romdhane 16
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
1.2.2.1.2. Identification des zones sources :
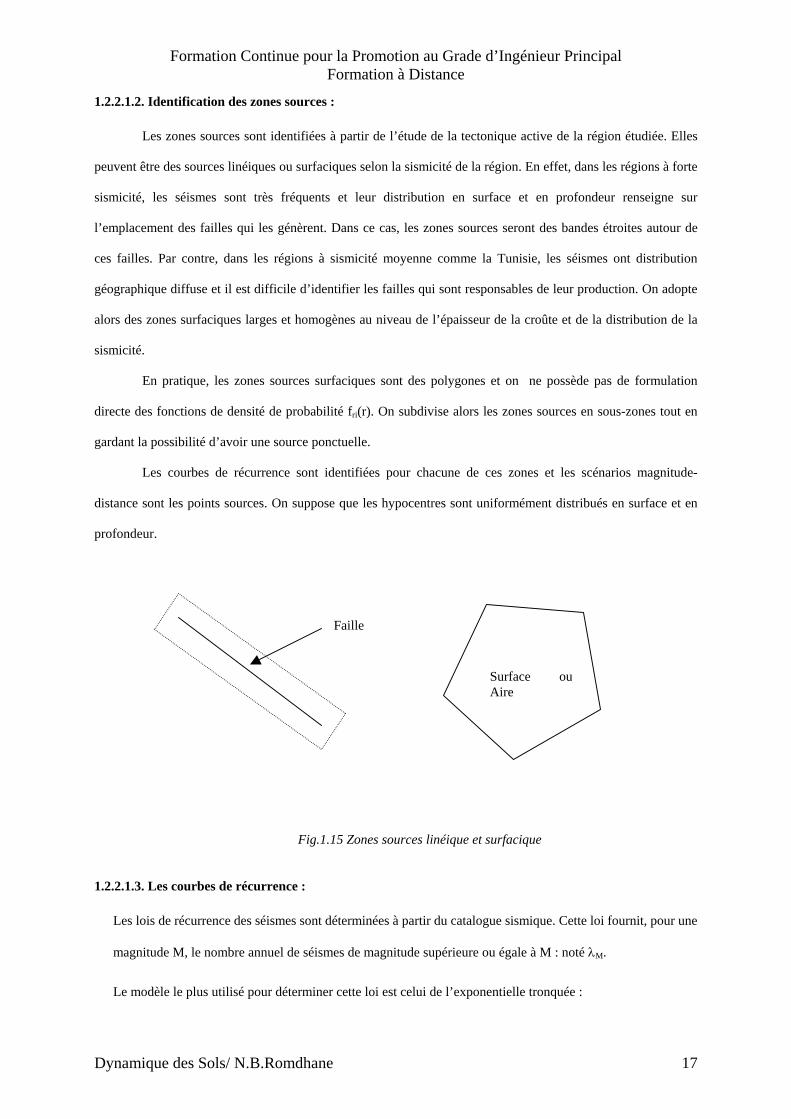
Les zones sources sont identifiées à partir de l’étude de la tectonique active de la région étudiée. Elles
peuvent être des sources linéiques ou surfaciques selon la sismicité de la région. En effet, dans les régions à forte
sismicité, les séismes sont très fréquents et leur distribution en surface et en profondeur renseigne sur
l’emplacement des failles qui les génèrent. Dans ce cas, les zones sources seront des bandes étroites autour de
ces failles. Par contre, dans les régions à sismicité moyenne comme la Tunisie, les séismes ont distribution
géographique diffuse et il est difficile d’identifier les failles qui sont responsables de leur production. On adopte
alors des zones surfaciques larges et homogènes au niveau de l’épaisseur de la croûte et de la distribution de la
sismicité.
En pratique, les zones sources surfaciques sont des polygones et on ne possède pas de formulation
directe des fonctions de densité de probabilité fri(r). On subdivise alors les zones sources en sous-zones tout en
gardant la possibilité d’avoir une source ponctuelle.
Les courbes de récurrence sont identifiées pour chacune de ces zones et les scénarios magnitude-
distance sont les points sources. On suppose que les hypocentres sont uniformément distribués en surface et en
profondeur.
Faille
Surface ouAire
Fig.1.15 Zones sources linéique et surfacique
1.2.2.1.3. Les courbes de récurrence :
Les lois de récurrence des séismes sont déterminées à partir du catalogue sismique. Cette loi fournit, pour une
magnitude M, le nombre annuel de séismes de magnitude supérieure ou égale à M : noté λM.
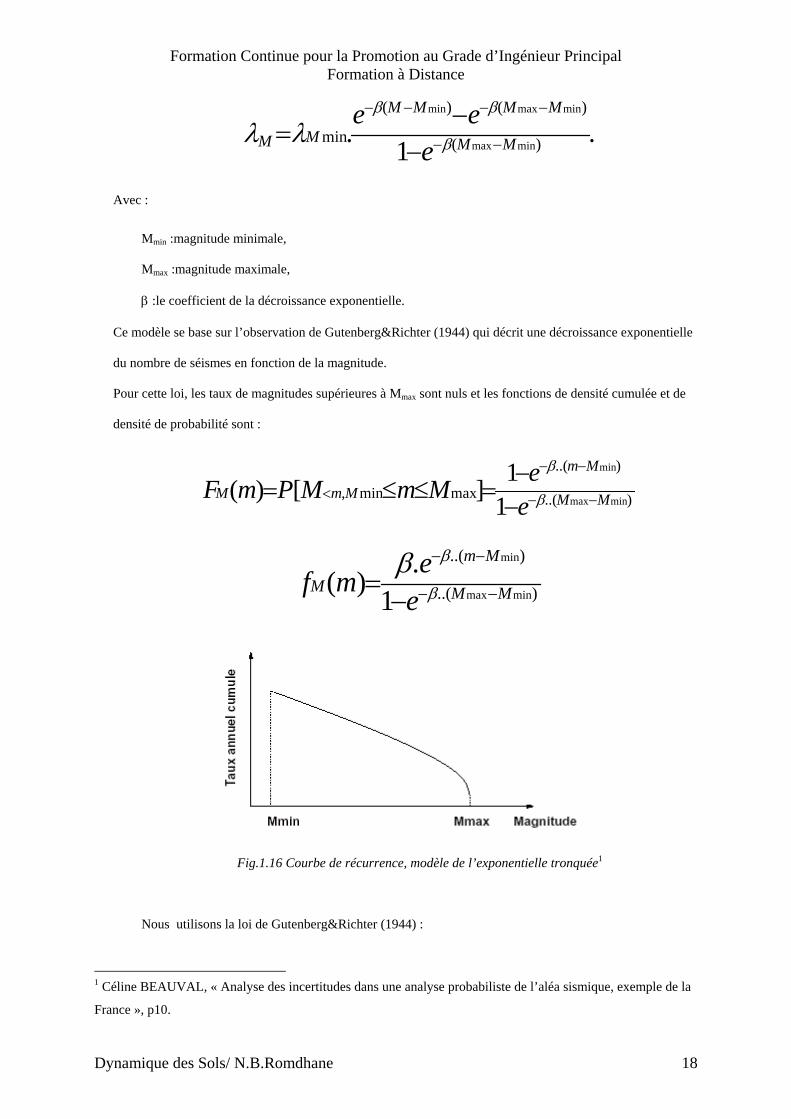
Le modèle le plus utilisé pour déterminer cette loi est celui de l’exponentielle tronquée :
Dynamique des Sols/ N.B.Romdhane 17
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
.1
. )(
)()(
min minmax
minmaxmin
MM
MMMM
MM eee
−−
−−−−
−−
= β
ββ
λλ
Avec :
Mmin :magnitude minimale,
Mmax :magnitude maximale,
β :le coefficient de la décroissance exponentielle.
Ce modèle se base sur l’observation de Gutenberg&Richter (1944) qui décrit une décroissance exponentielle
du nombre de séismes en fonction de la magnitude.
Pour cette loi, les taux de magnitudes supérieures à Mmax sont nuls et les fonctions de densité cumulée et de
densité de probabilité sont :
)..(
)..(
maxmin, minmax
min
11
][)( MM
Mm
MmM ee
MmMPmF −−
−−
<−−
=≤≤= β
β
)..(
)..(
minmax
min
1.
)( MM
Mm
M ee
mf −−
−−
−= β
ββ
Fig.1.16 Courbe de récurrence, modèle de l’exponentielle tronquée1
Nous utilisons la loi de Gutenberg&Richter (1944) :
1 Céline BEAUVAL, « Analyse des incertitudes dans une analyse probabiliste de l’aléa sismique, exemple de la
France », p10.
Dynamique des Sols/ N.B.Romdhane 18
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Log10N=a-b.M
N : nombre de séismes,
M :la magnitude,
a :le logarithme du nombre de séisme de magnitude 0.
b :la pente de la droite appelée aussi : « b-value ».
Notons que N peut être le nombre de séisme, le nombre cumulé de séisme ou encore le nombre
annuel cumulé.
On a ainsi :
λM =eα-β.M
Avec
• α=a.ln10
• β=b.ln10
λM =λM0.e-β.(M-M0)
λM =eα-β.M
où: λM0 =eα-β.M0 et M0 est la magnitude minimale du catalogue sismique.
Les paramètres λM0 et β sont déterminés à partir du catalogue sismique pour chaque zone source.
1.2.2.1.4. Estimation de la probabilité de dépassement :
Pour un scénario donné, la probabilité de dépassement d’une accélération A* est donnée à partir de la
loi d’atténuation. Cette loi prédit pour une magnitude M et une distance r, le logarithme de l’accélération
engendrée au site.
ArmgA ln.),,(ln σεθ +=
θ correspond au type de sol.
Dans cette équation, chaque triplet (m, r, θ) lui correspond une distribution de probabilité normale du
logarithme de l’accélération lnA, de moyenne Aln =g(m,r,θ) et d’écart typeσlnA.
On peut formuler g selon :
Dynamique des Sols/ N.B.Romdhane 19
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
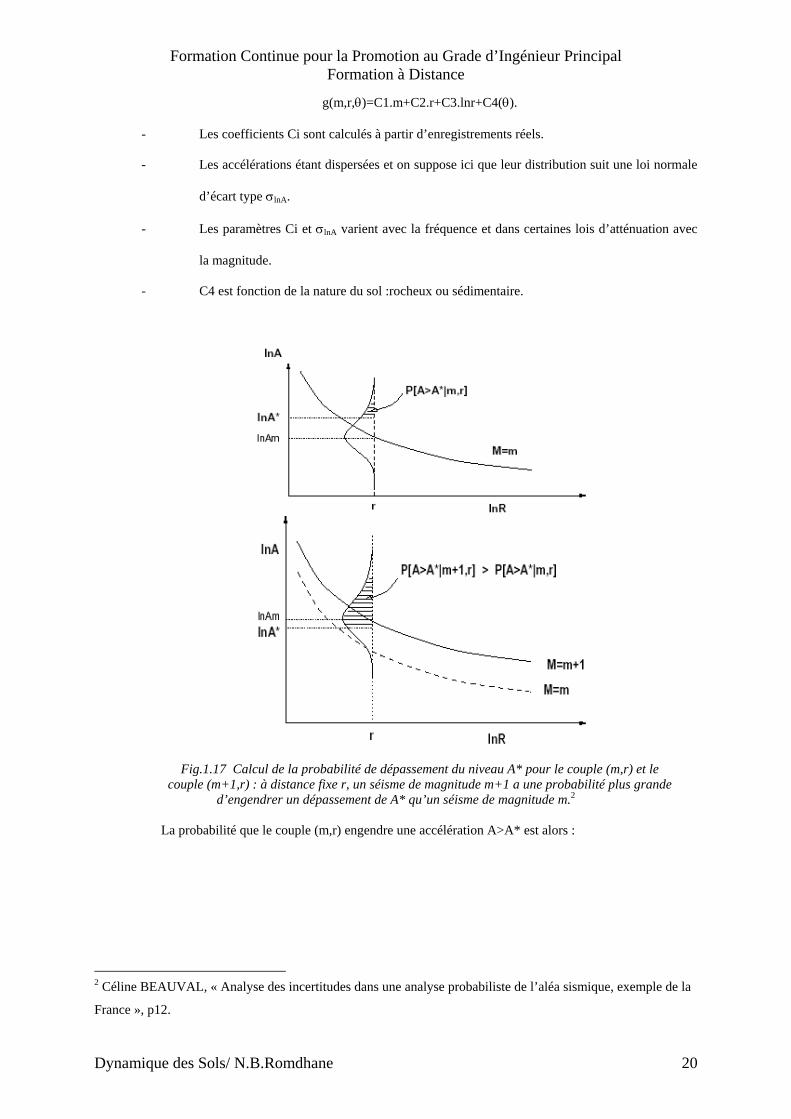
g(m,r,θ)=C1.m+C2.r+C3.lnr+C4(θ).
- Les coefficients Ci sont calculés à partir d’enregistrements réels.
- Les accélérations étant dispersées et on suppose ici que leur distribution suit une loi normale
d’écart type σlnA.
- Les paramètres Ci et σlnA varient avec la fréquence et dans certaines lois d’atténuation avec
la magnitude.
- C4 est fonction de la nature du sol :rocheux ou sédimentaire.
Fig.1.17 Calcul de la probabilité de dépassement du niveau A* pour le couple (m,r) et le couple (m+1,r) : à distance fixe r, un séisme de magnitude m+1 a une probabilité plus grande
d’engendrer un dépassement de A* qu’un séisme de magnitude m.2
La probabilité que le couple (m,r) engendre une accélération A>A* est alors :
2 Céline BEAUVAL, « Analyse des incertitudes dans une analyse probabiliste de l’aléa sismique, exemple de la
France », p12.
Dynamique des Sols/ N.B.Romdhane 20

Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
.ln*ln1),/*(ln ⎥⎦
⎤⎢⎣⎡ −Φ−=>
AAArmAAP σ
Avec : Φ :la distribution de probabilité normale standard cumulée. Cette probabilité correspond à
l’aire sous la courbe de la figure précédente.
1.2.2.1.5.. Obtention des accélérations :
Interpolation :
Pour le calcul de l’aléa probabiliste, on cherche le taux annuel de l’occurrence d’une accélération
supérieure à A* qui est elle-même recherchée. Pour cela, on mène le calcul pour une série d’accélérations cibles
et l’accélération correspondant au taux annuel d’intérêt est ensuite obtenue par interpolation.
Modèle de Poisson :
Les séismes sont supposés distribués dans le temps selon la loi de Poisson :
- Les séismes sont indépendants dans l’espace,
- Les séismes sont indépendants dans le temps,
- La probabilité que deux séismes frappent au même moment et au même instant tend vers 0.
Selon la loi de Poisson, la probabilité P que le phénomène se produise au moins une fois pendant la
durée t est :
P=1-e-τ.t.
Avec: τ est le taux annuel moyen.
Ceci conduit à supposer que l’occurrence des accélérations suive également la loi de Poisson. C’est
à dire que si τA* correspond au taux annuel de dépassement de A*, alors la probabilité P qu’il se produise au
site au moins une accélération supérieure à A* pendant le temps t est :
ττ 111 . =−=−=
−− TaveceeP Tt
t
pour P et t donnés :
tP)1ln( −−=τ
Le choix de la probabilité P est purement économique voire politique. Dimensionner un bâtiment
pour qu’il résiste à l’accélération correspondant à une période de retour de 475 ans, c’est dimensionner le
Dynamique des Sols/ N.B.Romdhane 21
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
bâtiment afin qu’il soit capable de supporter une accélération qui a 10% de chance d’être dépassée sur les 50
prochaines années (ou 90% de chances de ne pas être dépassée). Les 50 ans correspondent à la durée de vie
moyenne des bâtiments conventionnels. En ce qui concerne les installations nucléaires, les périodes de retour
considérées sont de l’ordre de 104 à 107 ans.
1.2.2.2 L’approche déterministe.
Deux méthodes sont valables ; la méthode analytique fait intervenir le mécanisme à la source, généralement
méconnu et complexe à cerner. Une approche empirique consiste à rechercher le plus important séisme survenu
dans le passé dans la région et admet qu’un séisme analogue peut se produire en tout point de cette même région.
A l’aide de lois d’atténuation adaptées à la région (et au voisinage immédiat), il est possible de déterminer les
caractéristiques du séisme maximal.
Les étapes de cette deuxième approche sont les suivantes :
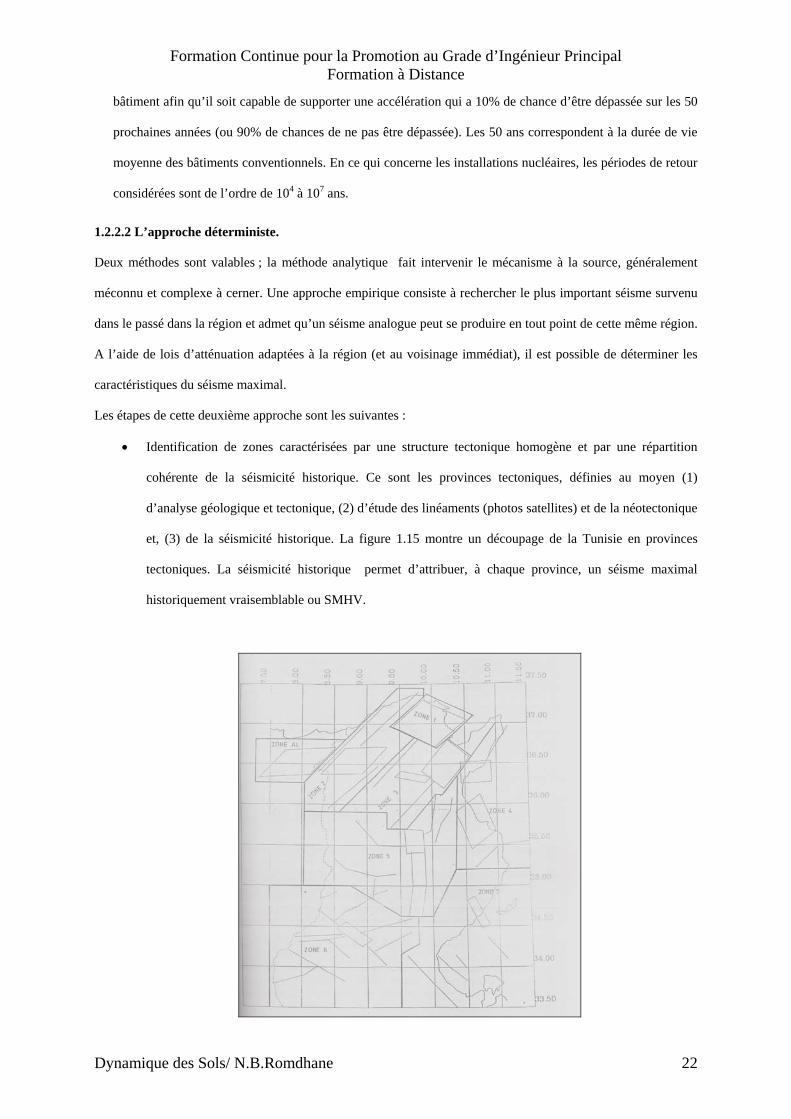
• Identification de zones caractérisées par une structure tectonique homogène et par une répartition
cohérente de la séismicité historique. Ce sont les provinces tectoniques, définies au moyen (1)
d’analyse géologique et tectonique, (2) d’étude des linéaments (photos satellites) et de la néotectonique
et, (3) de la séismicité historique. La figure 1.15 montre un découpage de la Tunisie en provinces
tectoniques. La séismicité historique permet d’attribuer, à chaque province, un séisme maximal
historiquement vraisemblable ou SMHV.
Dynamique des Sols/ N.B.Romdhane 22
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Figure 1.15. Les provinces tectoniques en Tunisie.
• Définition du séisme maximal de projet (SMHV+1) dans chacune des provinces contenant le site ou
voisine. Ce séisme est déplacé dans sa province, jusqu’au point le plus proche du site, le long d’un
accident tectonique si celui-ci lui est rattaché.
• Evaluation de l’effet de chaque séisme maximal sur le site étudié en lui appliquant des lois
d’atténuation appropriées. Généralement, ces lois expriment l’atténuation de l’accélération horizontale
maximale en fonction de la magnitude et de la distance (l’accélération verticale est moins
dommageable car les structures ont été dimensionnées pour résister à leur propre poids, donc à une
accélération de 1g). La carte d’aléa sismique de la région de Tunis est un exemple de courbes d’iso
accélération probable directement utilisables. Le spectre de réponse du mouvement est donné à l’aide
d’un spectre lissé, calé au niveau de l’accélération maximale calculée sur le site.
1.3 L’effet de site sismique.
Pour le calcul d'ouvrages dans un site donné, l'idéal serait que ce spectre de calcul (ou de projet) soit
l'enveloppe d'un ensemble de spectres calculés à partir d'accélérogrammes de séismes mesurés sur le site lui-
même ou dans des sites comparables. Lorsque la région est à faible séismicité, pour laquelle on ne dispose
pas d'enregistrements de mouvements forts, une méthode consiste à sélectionner dans un catalogue de
séismes enregistrés, des accélérogrammes dont les conditions (mécanisme au foyer probable, magnitude,
profondeur, distance focale, nature des terrains, etc.…) coïncident avec les conditions du site étudié. Qu'ils
soient locaux, "importés" ou encore synthétiques, les enregistrements de tels séismes sont effectués
généralement sur un affleurement rocheux horizontal. Lorsque les accélérogrammes sont établis sur des sites
non rocheux, leur allure peut être sensiblement modifiée (figure 1.16).
Lorsque l'ouvrage est implanté sur un site à remplissage sédimentaire ou encore à topographie de surface ou
souterraine chahutée, le piégeage des ondes sismiques dans les couches de surface peut conduire à des
amplifications dont les conséquences sont de trois types [AFPS, 1990]:
La modification du signal sismique entre la source et le site ou "effet de site";
les petites modifications du sol;
les grands mouvements de terrains.
Dynamique des Sols/ N.B.Romdhane 23
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
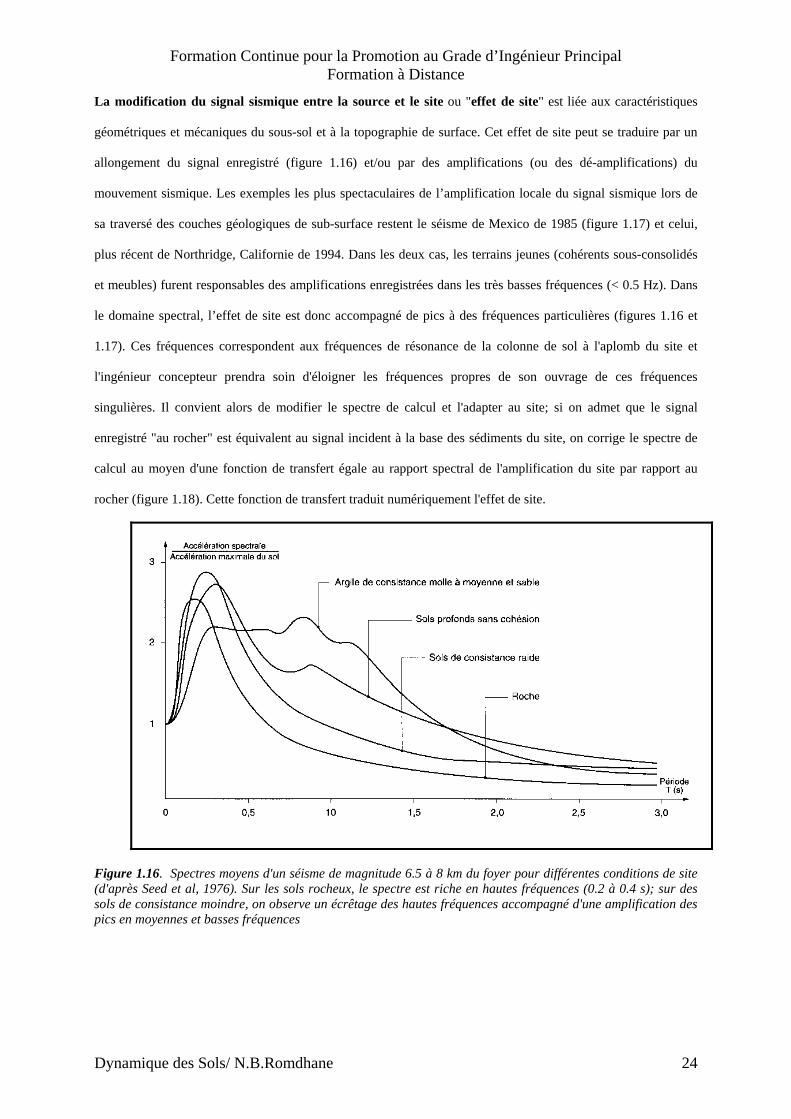
La modification du signal sismique entre la source et le site ou "effet de site" est liée aux caractéristiques
géométriques et mécaniques du sous-sol et à la topographie de surface. Cet effet de site peut se traduire par un
allongement du signal enregistré (figure 1.16) et/ou par des amplifications (ou des dé-amplifications) du
mouvement sismique. Les exemples les plus spectaculaires de l’amplification locale du signal sismique lors de
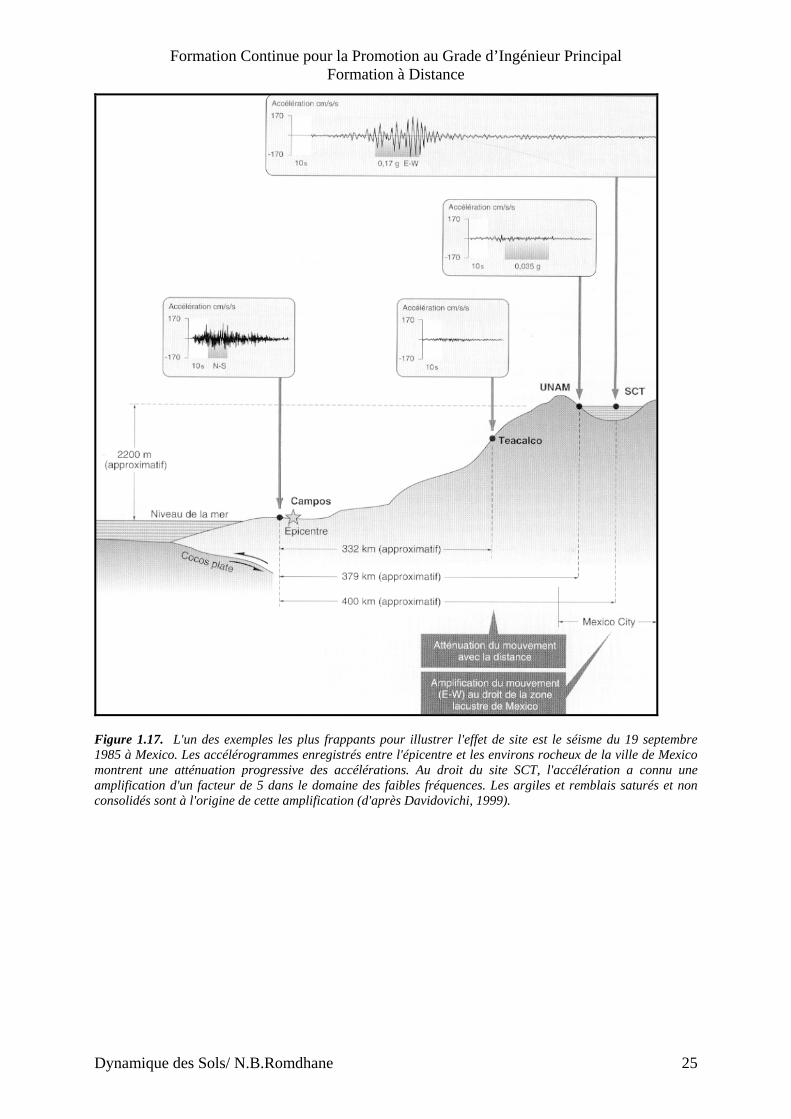
sa traversé des couches géologiques de sub-surface restent le séisme de Mexico de 1985 (figure 1.17) et celui,
plus récent de Northridge, Californie de 1994. Dans les deux cas, les terrains jeunes (cohérents sous-consolidés
et meubles) furent responsables des amplifications enregistrées dans les très basses fréquences (< 0.5 Hz). Dans
le domaine spectral, l’effet de site est donc accompagné de pics à des fréquences particulières (figures 1.16 et
1.17). Ces fréquences correspondent aux fréquences de résonance de la colonne de sol à l'aplomb du site et
l'ingénieur concepteur prendra soin d'éloigner les fréquences propres de son ouvrage de ces fréquences
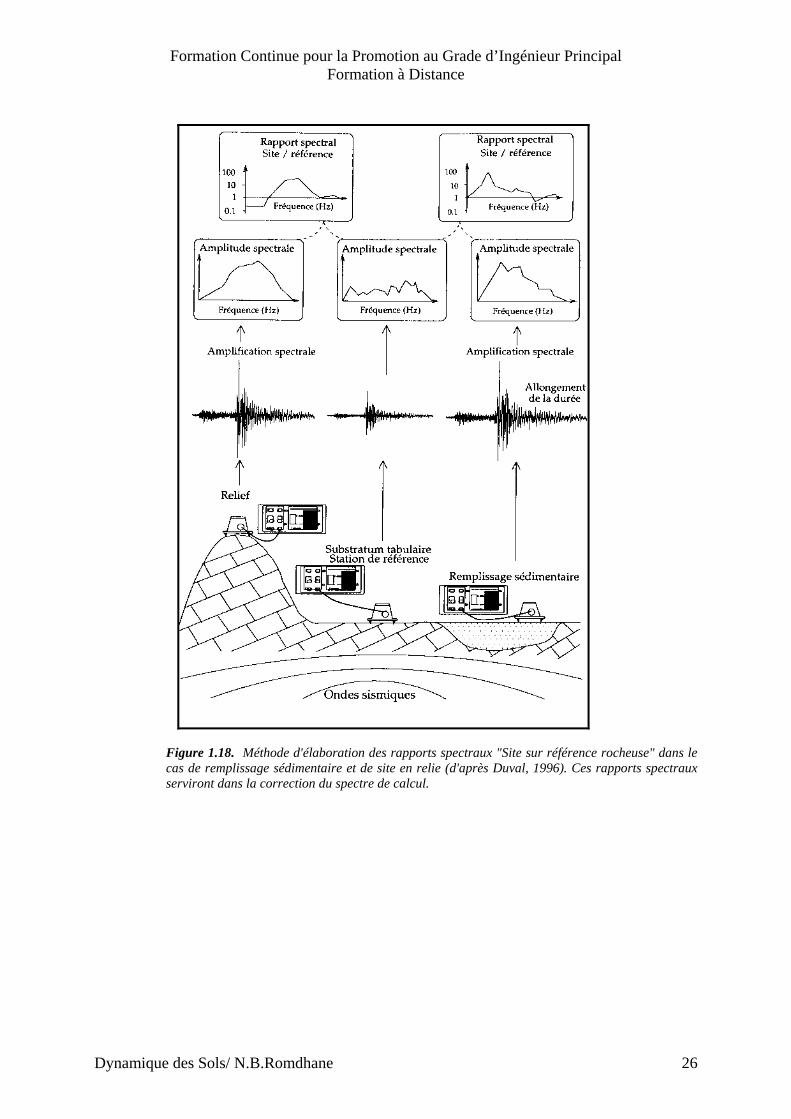
singulières. Il convient alors de modifier le spectre de calcul et l'adapter au site; si on admet que le signal
enregistré "au rocher" est équivalent au signal incident à la base des sédiments du site, on corrige le spectre de
calcul au moyen d'une fonction de transfert égale au rapport spectral de l'amplification du site par rapport au
rocher (figure 1.18). Cette fonction de transfert traduit numériquement l'effet de site.
Figure 1.16. Spectres moyens d'un séisme de magnitude 6.5 à 8 km du foyer pour différentes conditions de site (d'après Seed et al, 1976). Sur les sols rocheux, le spectre est riche en hautes fréquences (0.2 à 0.4 s); sur des sols de consistance moindre, on observe un écrêtage des hautes fréquences accompagné d'une amplification des pics en moyennes et basses fréquences
Dynamique des Sols/ N.B.Romdhane 24
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Figure 1.17. L'un des exemples les plus frappants pour illustrer l'effet de site est le séisme du 19 septembre 1985 à Mexico. Les accélérogrammes enregistrés entre l'épicentre et les environs rocheux de la ville de Mexico montrent une atténuation progressive des accélérations. Au droit du site SCT, l'accélération a connu une amplification d'un facteur de 5 dans le domaine des faibles fréquences. Les argiles et remblais saturés et non consolidés sont à l'origine de cette amplification (d'après Davidovichi, 1999).
Dynamique des Sols/ N.B.Romdhane 25
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Figure 1.18. Méthode d'élaboration des rapports spectraux "Site sur référence rocheuse" dans le cas de remplissage sédimentaire et de site en relie (d'après Duval, 1996). Ces rapports spectraux serviront dans la correction du spectre de calcul.
Dynamique des Sols/ N.B.Romdhane 26
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Chapitre II.
Comportement des sols sous chargement dynamique.
Lors du passage d'une onde sismique, que l'on a supposé de cisaillement, se propageant verticalement, le sol
connaît un chargement cyclique. Il convient donc, d’étudier le comportement des sols sous de tels chargements.
2.1 Loi de Comportement.
La loi de comportement est une relation entre la tenseur des contraintes et le tenseur des déformations : partant
d’un état d’équilibre caractérisé par un champ de contrainte σ et un champ de déformation ε, la loi permet de
définir le nouvel état de déformation après application d’un incrément de contrainte δσ. La formulation de cette
loi est obtenue dans le cadre d’une théorie donnée : élasticité, visco-élasticité, élasto-plasticité, etc…au moyen
de résultats expérimentaux. Avant d’examiner le comportement des sols sous chargement cyclique, il convient
de rappeler le comportement des sols sous chargement quasi-statique monotone.
2.1.1 Chargement monotone.
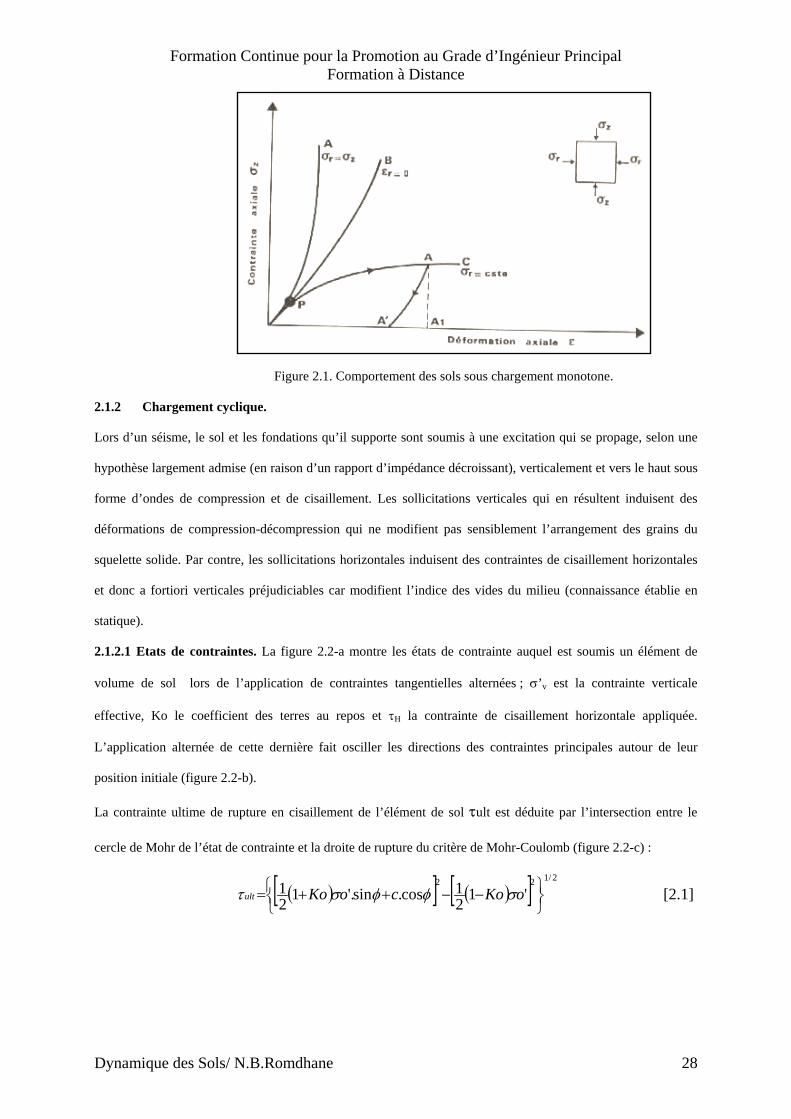
La figure 2.1 montre des courbes effort-déformation obtenues au triaxial pour différents chemins de contraintes
et qu’il convient de commenter :
• Le domaine OP est le domaine d’élasticité linéaire ; c’est un domaine de faibles
déformations pour lequel le chemin de décharge est identique au chemin de charge et pour
lequel la relation entre la contrainte et la déformation est linéaire;
• Au de-là du point P, la relation contrainte-déformation n’est plus linéaire mais peut rester
élastique.
• A partir d’un niveau de contrainte (A sur la courbe C), le chemin de décharge (AA’) est
différent du chemin de charge (0A) et une déformation irréversible OA’ dite plastique
apparaît. Le comportement du sol est de nouveau élastique linéaire entre A’ et A et il est
dit alors élasto-plastique
• Dans certains types de chargements, la déformation peut devenir importante pour des
valeurs finies de la contrainte ; c’est le domaine de la rupture.
Dynamique des Sols/ N.B.Romdhane 27
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Figure 2.1. Comportement des sols sous chargement monotone.
2.1.2 Chargement cyclique. Lors d’un séisme, le sol et les fondations qu’il supporte sont soumis à une excitation qui se propage, selon une
hypothèse largement admise (en raison d’un rapport d’impédance décroissant), verticalement et vers le haut sous
forme d’ondes de compression et de cisaillement. Les sollicitations verticales qui en résultent induisent des
déformations de compression-décompression qui ne modifient pas sensiblement l’arrangement des grains du
squelette solide. Par contre, les sollicitations horizontales induisent des contraintes de cisaillement horizontales
et donc a fortiori verticales préjudiciables car modifient l’indice des vides du milieu (connaissance établie en
statique).
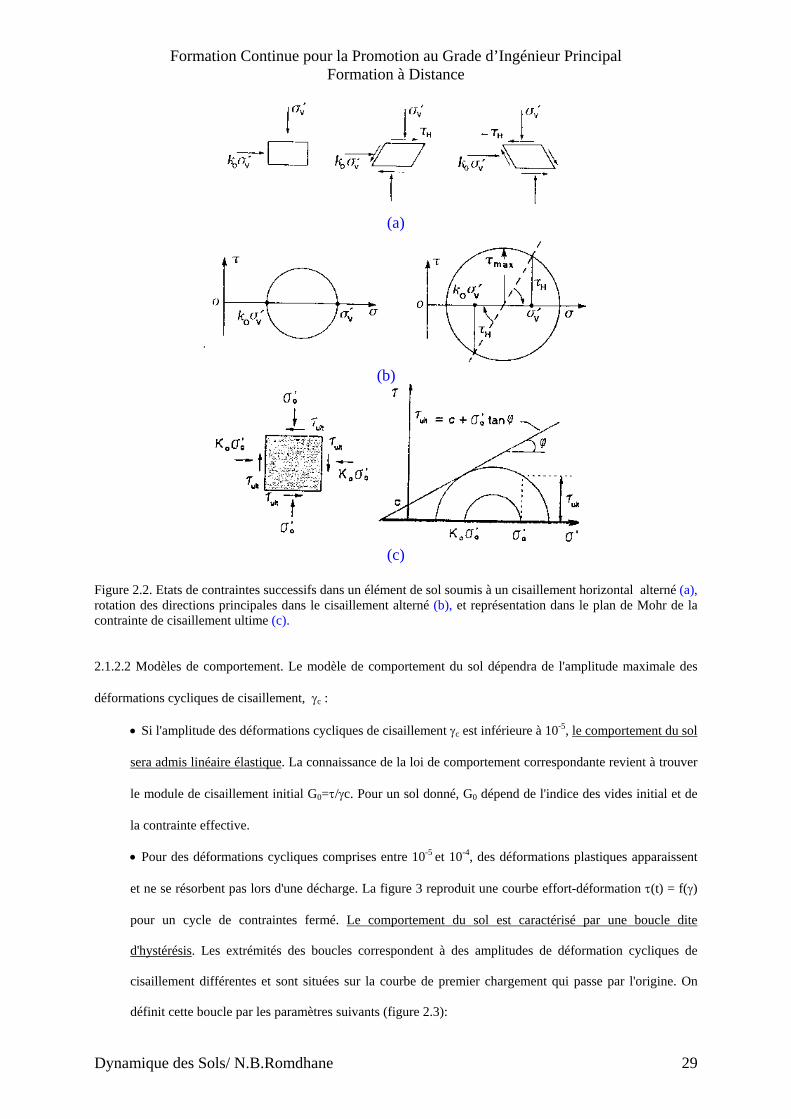
2.1.2.1 Etats de contraintes. La figure 2.2-a montre les états de contrainte auquel est soumis un élément de
volume de sol lors de l’application de contraintes tangentielles alternées ; σ’v est la contrainte verticale
effective, Ko le coefficient des terres au repos et τH la contrainte de cisaillement horizontale appliquée.
L’application alternée de cette dernière fait osciller les directions des contraintes principales autour de leur
position initiale (figure 2.2-b).
La contrainte ultime de rupture en cisaillement de l’élément de sol τult est déduite par l’intersection entre le
cercle de Mohr de l’état de contrainte et la droite de rupture du critère de Mohr-Coulomb (figure 2.2-c) :
( )[ ] ( )[ ] 2/122'12
1cos.sin'.121
⎭⎬⎫
⎩⎨⎧ −−++= oKocoKoult σφφστ [2.1]
Dynamique des Sols/ N.B.Romdhane 28
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
(a)
(b)
(c)
Figure 2.2. Etats de contraintes successifs dans un élément de sol soumis à un cisaillement horizontal alterné (a), rotation des directions principales dans le cisaillement alterné (b), et représentation dans le plan de Mohr de la contrainte de cisaillement ultime (c). 2.1.2.2 Modèles de comportement. Le modèle de comportement du sol dépendra de l'amplitude maximale des
déformations cycliques de cisaillement, γc :
• Si l'amplitude des déformations cycliques de cisaillement γc est inférieure à 10-5, le comportement du sol
sera admis linéaire élastique. La connaissance de la loi de comportement correspondante revient à trouver
le module de cisaillement initial G0=τ/γc. Pour un sol donné, G0 dépend de l'indice des vides initial et de
la contrainte effective.
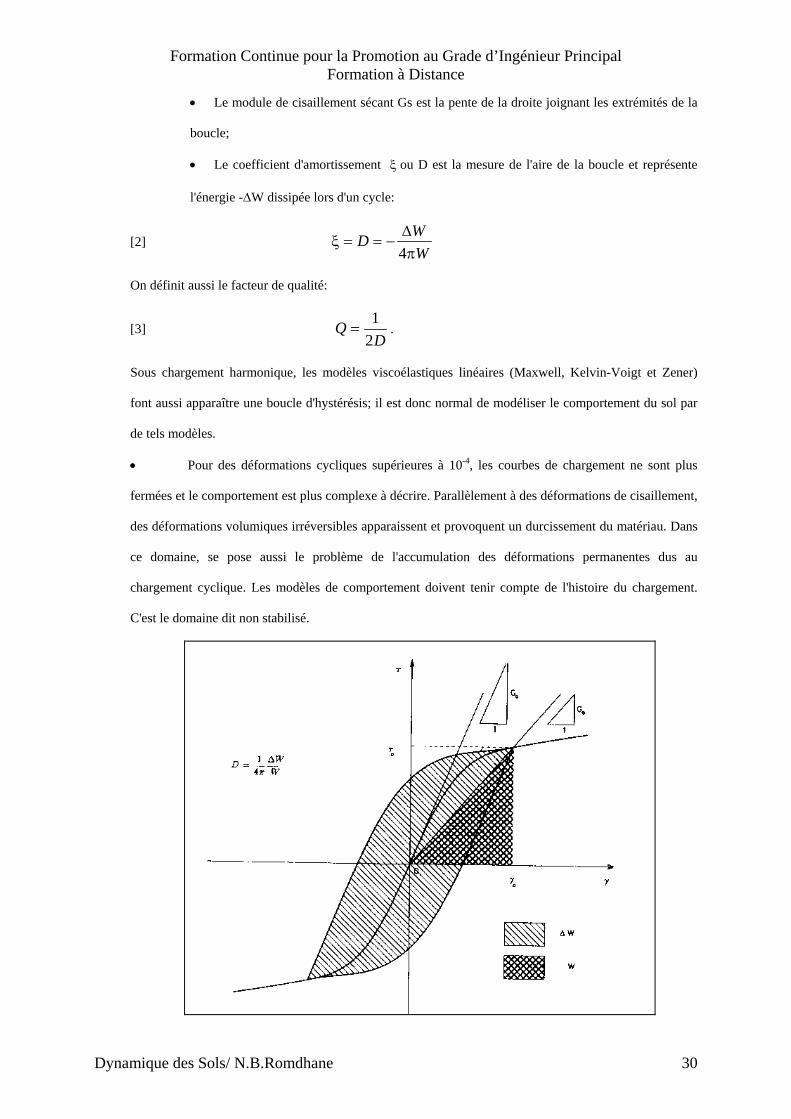
• Pour des déformations cycliques comprises entre 10-5 et 10-4, des déformations plastiques apparaissent
et ne se résorbent pas lors d'une décharge. La figure 3 reproduit une courbe effort-déformation τ(t) = f(γ)
pour un cycle de contraintes fermé. Le comportement du sol est caractérisé par une boucle dite
d'hystérésis. Les extrémités des boucles correspondent à des amplitudes de déformation cycliques de
cisaillement différentes et sont situées sur la courbe de premier chargement qui passe par l'origine. On
définit cette boucle par les paramètres suivants (figure 2.3):
Dynamique des Sols/ N.B.Romdhane 29
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
• Le module de cisaillement sécant Gs est la pente de la droite joignant les extrémités de la
boucle;
• Le coefficient d'amortissement ξ ou D est la mesure de l'aire de la boucle et représente
l'énergie -∆W dissipée lors d'un cycle:
[2] WWD
π∆
−==ξ4
On définit aussi le facteur de qualité:
[3] D
Q21
= .
Sous chargement harmonique, les modèles viscoélastiques linéaires (Maxwell, Kelvin-Voigt et Zener)
font aussi apparaître une boucle d'hystérésis; il est donc normal de modéliser le comportement du sol par
de tels modèles.
• Pour des déformations cycliques supérieures à 10-4, les courbes de chargement ne sont plus
fermées et le comportement est plus complexe à décrire. Parallèlement à des déformations de cisaillement,
des déformations volumiques irréversibles apparaissent et provoquent un durcissement du matériau. Dans
ce domaine, se pose aussi le problème de l'accumulation des déformations permanentes dus au
chargement cyclique. Les modèles de comportement doivent tenir compte de l'histoire du chargement.
C'est le domaine dit non stabilisé.
Dynamique des Sols/ N.B.Romdhane 30
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Figure 2.3: Définition du module sécant G et du coefficient d'amortissement D.
2.2 Le modèle élastique.
Dans le cas de vibrations de massifs de machines tournantes, de sollicitations sismiques de faible amplitude (cas
des essais de géophysique, SPT, etc…), le comportement du sol peut être considéré élastique. Dans le cas de
sollicitations unidirectionnelles, on peut écrire :
[2.4] γτ ⋅= G où G est le module de cisaillement.
Les paramètres qu'il est nécessaire de connaître alors pour décrire le comportement du sol sont, outre la nature de
chaque couche et son poids volumique, le module de cisaillement G=Gmax et le coefficient d'amortissement D.
Des essais in situ et en laboratoire sur échantillons intacts fournissent ces paramètres.
• Les essais in situ cherchent à mesurer les vitesses de propagation des ondes ( Pou S) dans le
massif. Pour des petites déformations, celles-ci sont liées aux paramètres de la loi de
comportement ( G et λ ) par les relations:
[2.5] G = ρ VS2 (G=Gmax)
[2.6] λ + 2G = ρ VP2.
• Avec les essais en laboratoire, nous sommes confrontés à la représentativité des échantillons,
souvent difficile à vérifier (remaniement des sols, incertitudes quant à l'état des contraintes
horizontales dans le sol,etc…). Ce type d'essais a néanmoins permis de dégager les paramètres
principaux dont dépend G, à savoir:
o la compacité du sol donnée par l'indice des vides e,
o l'état actuel des contraintes (effectives) σ'0,
o le rapport de surconsolidation (OCR) entre la contrainte de préconsolidation et la
contrainte due au poids des terres
o la résistance au cisaillement dans des conditions non consolidées et non drainées
Cuu,
o et l'indice de plasticité pour les sols fins IP (%).
Plusieurs relations empiriques expriment Gmax en fonction de ces paramètres pour des sols
courants. Nous citerons en particulier celle proposée par Hardin et Black [1968], Hardin et
Drnevich [1972] et Hardin [1978] pour les argiles:
Dynamique des Sols/ N.B.Romdhane 31
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
[2.7] ( ) [ ]Pam' n
)e(FOCR kKPamaxG σ=
K et n sont des constantes du matériau, Pa la pression atmosphérique et σ'm la contrainte
effective moyenne. L'exposant k dépend de l'indice de plasticité IP et F(e) est donnée en
fonction de l'indice des vides e sous la forme:
[2.8] 2140270301 .e.,e..)e(F ≤≤+=
• Des essais sur échantillons intacts couplés à des mesures géophysiques in situ permettent aussi
d'estimer Gmax. La relation proposée par Seed et Idriss [1970] fait intervenir la cohésion non
drainée Cuu sous la forme:
[2.9] Où K varie entre 1000 et 3000. Cu.KmaxG =
• Enfin, une méthode empirique consiste à mettre à profit les données pressiométriques, module
E et pression limite Pl. Cette méthode d’interpolation a été développée par
N.B.Romdhane(2002) dans le cas des sols cohérents de la ville de Tunis.
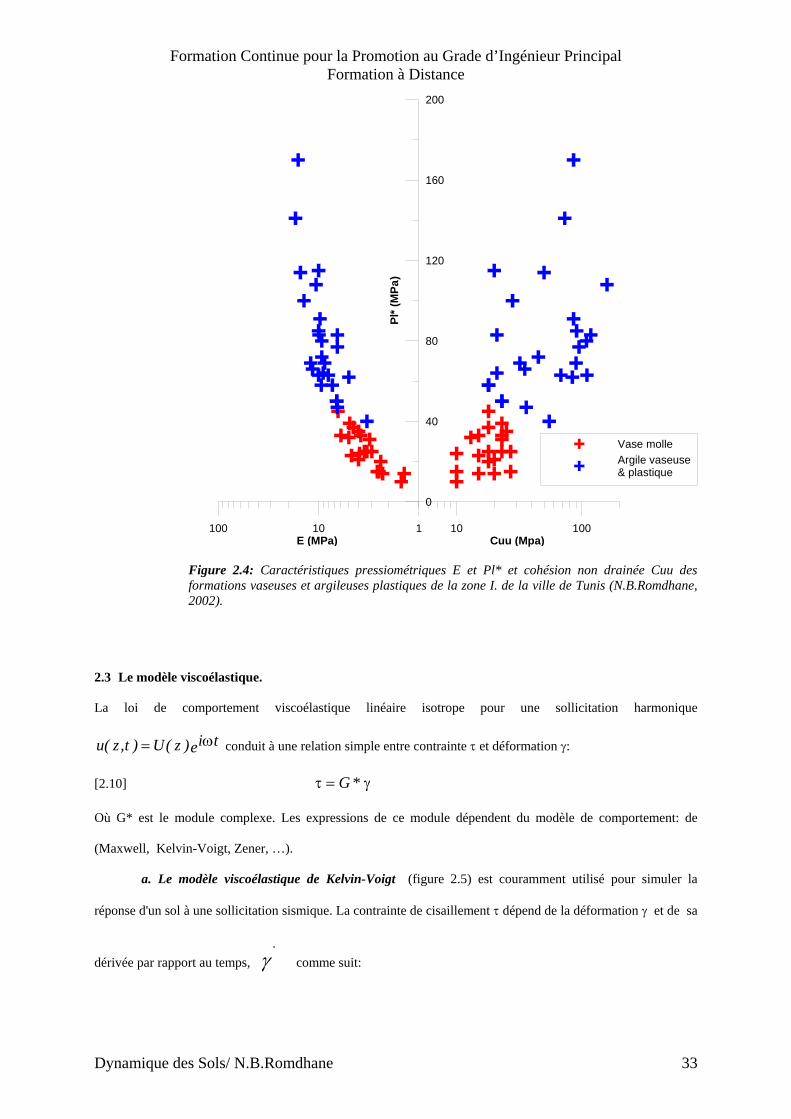
D’après Seed et Idriss (1970), Cuu intervient dans le calcul de Gmax (et donc de VS) ; partant de
corrélations mises en évidence entre Cuu et Pl d'une part, et E et Pl d'autre part pour les sols
cohérents de la zone I de Tunis (figure 2.4), l'idée est de déduire VS à partir de E et Pl.
N.B.Romdhane (2002) admet en un premier temps une variation linéaire de VS fonction de E
d'une part et fonction de Pl d'autre part et ce, entre les bornes fixées par la grille de classification
des sols proposée par les règles de construction parasismiques PS92 (AFNOR, 1995).
Dynamique des Sols/ N.B.Romdhane 32
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
10 100Cuu (Mpa)
0
40
80
120
160
200
Pl* (
MPa
)
100 10 1E (MPa)
Vase molleArgile vaseuse& plastique
Figure 2.4: Caractéristiques pressiométriques E et Pl* et cohésion non drainée Cuu des formations vaseuses et argileuses plastiques de la zone I. de la ville de Tunis (N.B.Romdhane, 2002).
2.3 Le modèle viscoélastique.
La loi de comportement viscoélastique linéaire isotrope pour une sollicitation harmonique
conduit à une relation simple entre contrainte τ et déformation γ: e ti)z(U)t,z(u ω=
[2.10] γ=τ *G
Où G* est le module complexe. Les expressions de ce module dépendent du modèle de comportement: de
(Maxwell, Kelvin-Voigt, Zener, …).
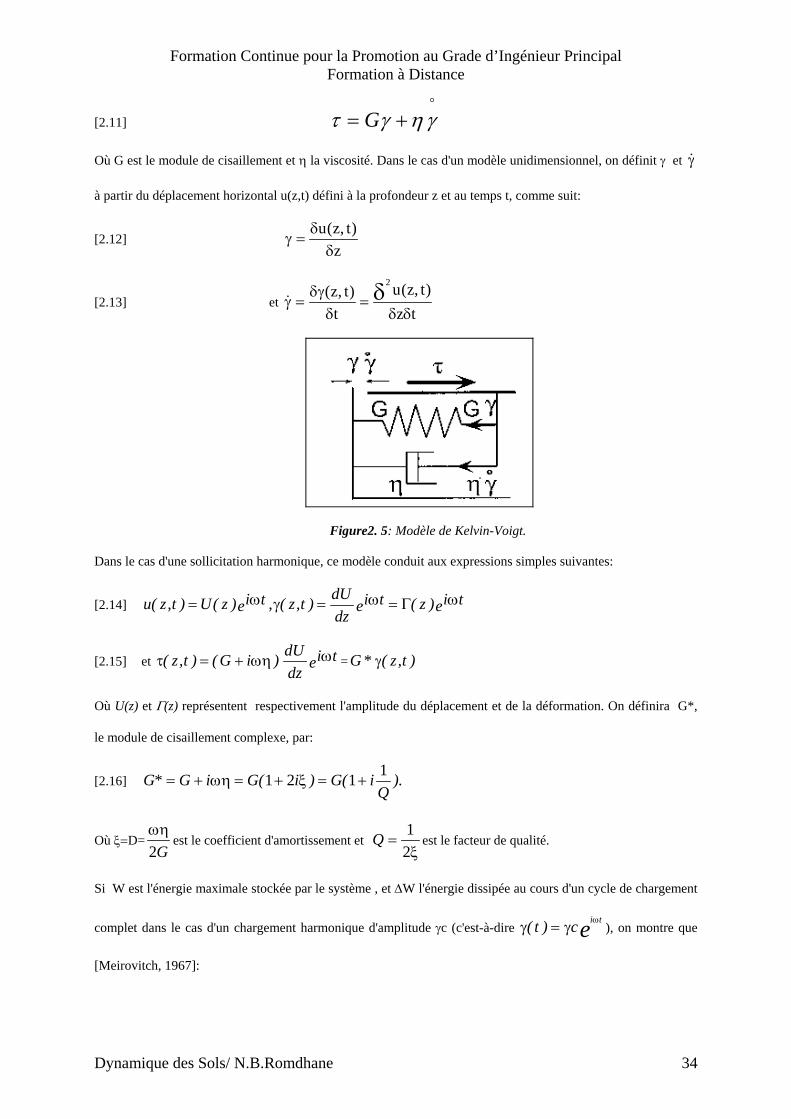
a. Le modèle viscoélastique de Kelvin-Voigt (figure 2.5) est couramment utilisé pour simuler la
réponse d'un sol à une sollicitation sismique. La contrainte de cisaillement τ dépend de la déformation γ et de sa
dérivée par rapport au temps, comme suit: .
γ
Dynamique des Sols/ N.B.Romdhane 33
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
[2.11] °
+= γηγτ G
Où G est le module de cisaillement et η la viscosité. Dans le cas d'un modèle unidimensionnel, on définit γ et γ&
à partir du déplacement horizontal u(z,t) défini à la profondeur z et au temps t, comme suit:
[2.12] z
)t,z(uδ
δ=γ
[2.13] et tz
)t,z(ut
)t,z(2
δδ=
δδγ
=γ δ&
Figure2. 5: Modèle de Kelvin-Voigt.
Dans le cas d'une sollicitation harmonique, ce modèle conduit aux expressions simples suivantes:
[2.14] e ti)z(e tidzdU)t,z(,e ti)z(U)t,z(u ωΓ=ω=γω=
[2.15] et )iG()t,z( ωη+=τ e tidzdU ω = )t,z(*G γ
Où U(z) et Γ(z) représentent respectivement l'amplitude du déplacement et de la déformation. On définira G*,
le module de cisaillement complexe, par:
[2.16] ).Q
i(G)i(GiG*G 1121 +=ξ+=ωη+=
Où ξ=D=G2
ωηest le coefficient d'amortissement et
ξ=
21Q est le facteur de qualité.
Si W est l'énergie maximale stockée par le système , et ∆W l'énergie dissipée au cours d'un cycle de chargement
complet dans le cas d'un chargement harmonique d'amplitude γc (c'est-à-dire ), on montre que
[Meirovitch, 1967]:
e tic)t( ωγ=γ
Dynamique des Sols/ N.B.Romdhane 34

Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
[2.17] ∫
γ
τ
γτπ=
∆π=ξ
c
c
d
.G
WW
421
4
2
b. Modèle linéaire équivalent.
La méthode linéaire équivalente consiste à modifier le modèle viscoélastique, de Kelvin-Voigt par exemple, pour
prendre en compte la non linéarité du comportement des sols. Pour cela, on a recours à une procédure de
linéarisation qui consiste à remplacer le modèle non linéaire par un modèle linéaire équivalent ayant des
propriétés dissipatives équivalentes à celle du matériau réel. Le comportement hystérétique réel d'un sol lors de
son chargement cyclique est illustré en figure 2.3-a.
Figure 2.6: Comportement hystérétique d'un sol sous chargement cyclique.
Le module de cisaillement linéaire équivalent, G, est pris égal au module de cisaillement sécant Gs défini par:
[2.18] ccGS γ
τ=
Où τc et γc sont respectivement les amplitudes de la contrainte de cisaillement et de la déformation
correspondante telles que décrites en figure 2.6-a. Le coefficient d'amortissement linéaire équivalent ξ est le
coefficient d'amortissement qui induit la même énergie dissipée lors d'un cycle complet de chargement d'un sol.
La courbe 2.6-b montre la variation de Gsec et ξ en fonction de la distorsion γ.
Plusieurs auteurs ont produit des courbes expérimentales représentant le module sécant normalisé Gsec/Gmax et
le coefficient d'atténuation ξ en fonction de la distorsion pour différents types de formations. Il s'agit notamment
de Hardin et Drnevitch [1970], Seed et Idriss [1970], Kokusho [1980], Seed et al [1986], Sun et al [1988] et
Vucetic et Dobry [1991]. Un catalogue de ces courbes accompagné des conditions de leur obtention figure en
Dynamique des Sols/ N.B.Romdhane 35

Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Bardet et al., [2001]. Hardin et Dnervich [1972] ont proposé les relations suivantes pour approcher leurs courbes
expérimentales :
c. Modèle des "séismologues".
Les séismologues utilisent une formulation différente de ce phénomène d'atténuation matérielle lors de la
propagation d'une onde plane dans un milieu atténuant. Lorsque la propagation se fait selon l'axe z avec la
vitesse V, une solution de l'équation d'ondes est:
[2.19] e Vzti.e Q
z.Uo)t,z(u ⎥
⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ −ω
λπ
−=
Où λ est la longueur d'onde et Q le facteur de qualité défini comme suit:
[2.20] E2E
Q1
π∆−=
où E est l'énergie maximale emmagasinée dans le matériau en un cycle de l'onde et –∆E l'énergie dissipée au
cours du cycle. Dans ces conditions, l'équation [ 19] peut s'écrire:
[2.21] exp Qi
Vzi.e tiUo)t,z(u ⎥
⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛ωλ
π−ω−ω=
1
Soit:
[2.22] .Uo)t,z(u =⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−−ω
Qi
Vztiexp
21 .
Le passage d'un modèle élastique à un modèle viscoélastique revient dans ces conditions à remplacer V1
par
⎟⎠⎞
⎜⎝⎛ − Q2
i1V1 dans l'équation du modèle élastique [19].
2.3 Le modèle non linéaire.
Lorsque le chargement n'est plus cyclique, la modélisation du comportement est plus complexe. De nombreux
modèles s'appuient sur des fonctions mathématiques et des données expérimentales en associations avec des
règles postulées pour décrire le comportement des sols hors des cycles (Masing, 1936). Les lois de Masing sont
les plus largement utilisées ; elles postulent que :
• La non linéarité des sols est de nature plastique ;
Dynamique des Sols/ N.B.Romdhane 36
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
• Les courbes de décharge et de recharge peuvent être déduites de la courbe de premier
chargement par translation de l’origine au point d’inversion du signe de chargement et
dilatation par un facteur de 2 des échelles horizontale et verticale.
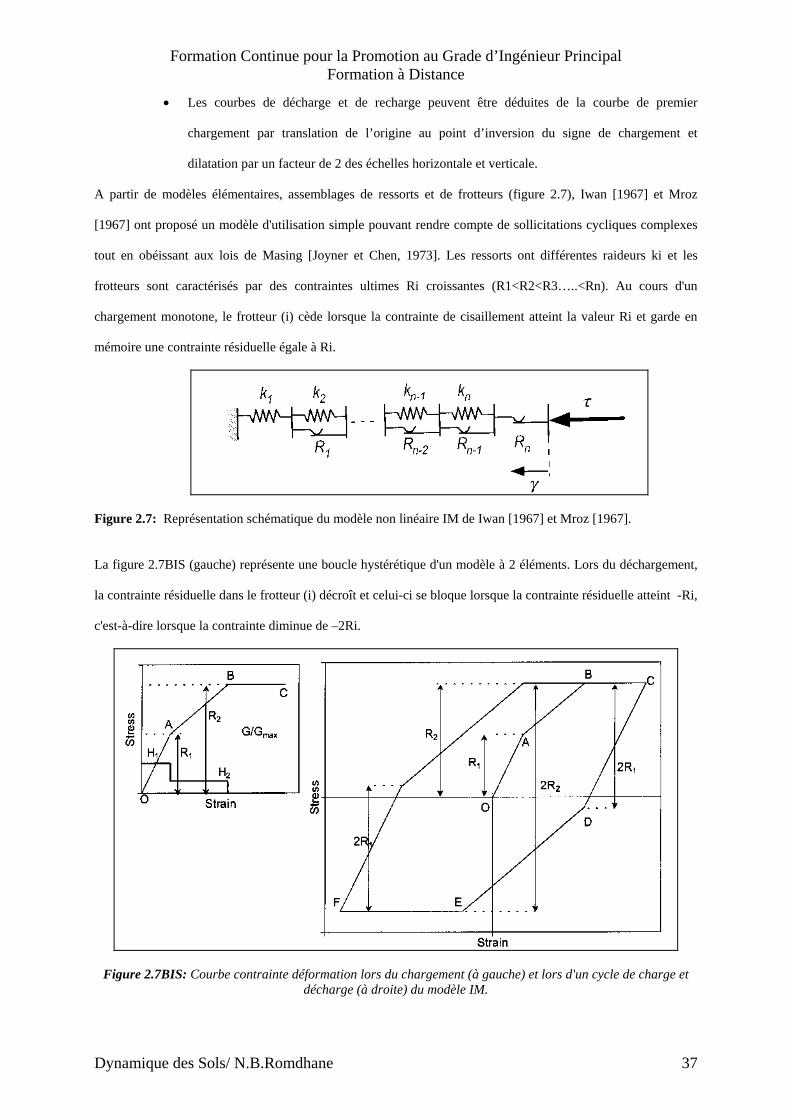
A partir de modèles élémentaires, assemblages de ressorts et de frotteurs (figure 2.7), Iwan [1967] et Mroz
[1967] ont proposé un modèle d'utilisation simple pouvant rendre compte de sollicitations cycliques complexes
tout en obéissant aux lois de Masing [Joyner et Chen, 1973]. Les ressorts ont différentes raideurs ki et les
frotteurs sont caractérisés par des contraintes ultimes Ri croissantes (R1<R2<R3…..<Rn). Au cours d'un
chargement monotone, le frotteur (i) cède lorsque la contrainte de cisaillement atteint la valeur Ri et garde en
mémoire une contrainte résiduelle égale à Ri.
Figure 2.7: Représentation schématique du modèle non linéaire IM de Iwan [1967] et Mroz [1967].
La figure 2.7BIS (gauche) représente une boucle hystérétique d'un modèle à 2 éléments. Lors du déchargement,
la contrainte résiduelle dans le frotteur (i) décroît et celui-ci se bloque lorsque la contrainte résiduelle atteint -Ri,
c'est-à-dire lorsque la contrainte diminue de –2Ri.
Figure 2.7BIS: Courbe contrainte déformation lors du chargement (à gauche) et lors d'un cycle de charge et décharge (à droite) du modèle IM.
Dynamique des Sols/ N.B.Romdhane 37
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Lorsque la courbe contrainte-déformation expérimentale est générée par un nombre n discret de points (γi,
Gi.γi), le coefficient d'amortissement critique ξi, pour une déformation γi, peut s'exprimer de la manière
suivante:
[23]
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡−
π=ξ
=ξ
γ122
01
2i.Gi
Aii
,
pour i=2,…n et où Ai est la surface limitée entre l'axe horizontal et la
courbe OABC.
Dynamique des Sols/ N.B.Romdhane 38
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Chapitre III.
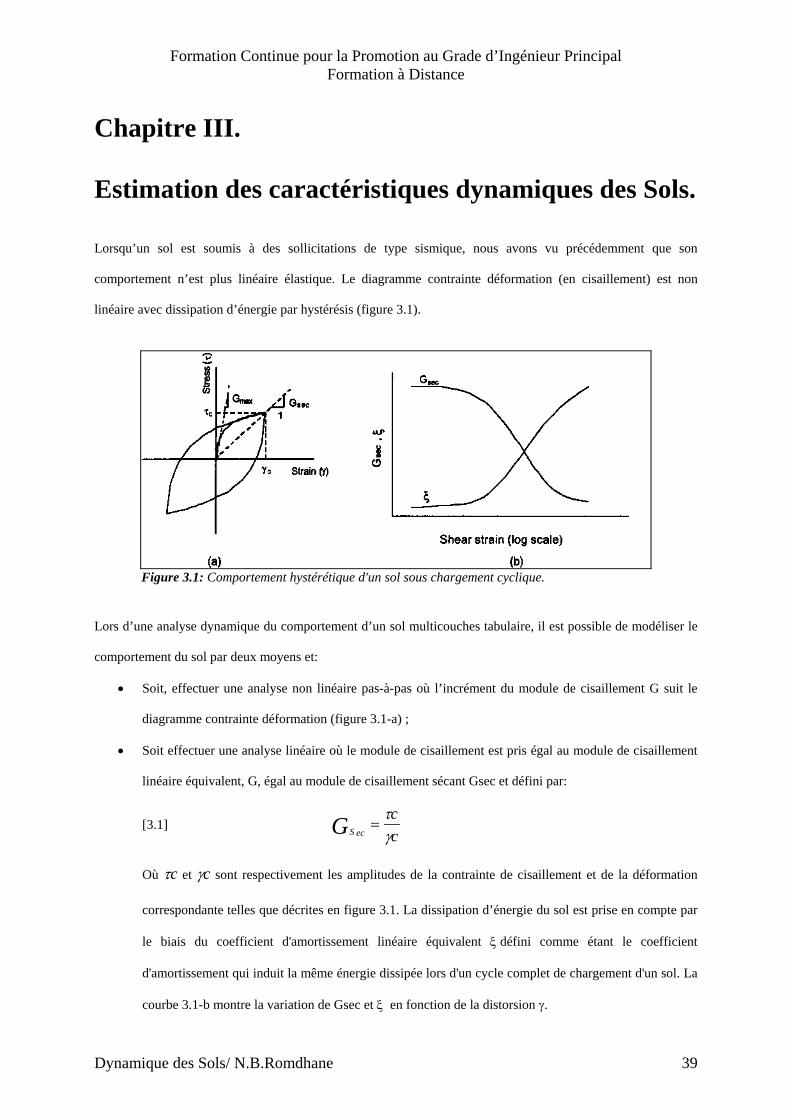
Estimation des caractéristiques dynamiques des Sols. Lorsqu’un sol est soumis à des sollicitations de type sismique, nous avons vu précédemment que son
comportement n’est plus linéaire élastique. Le diagramme contrainte déformation (en cisaillement) est non
linéaire avec dissipation d’énergie par hystérésis (figure 3.1).
Figure 3.1: Comportement hystérétique d'un sol sous chargement cyclique.
Lors d’une analyse dynamique du comportement d’un sol multicouches tabulaire, il est possible de modéliser le
comportement du sol par deux moyens et:
• Soit, effectuer une analyse non linéaire pas-à-pas où l’incrément du module de cisaillement G suit le
diagramme contrainte déformation (figure 3.1-a) ;
• Soit effectuer une analyse linéaire où le module de cisaillement est pris égal au module de cisaillement
linéaire équivalent, G, égal au module de cisaillement sécant Gsec et défini par:
[3.1] cc
ecSG γτ
=
Où τc et γc sont respectivement les amplitudes de la contrainte de cisaillement et de la déformation
correspondante telles que décrites en figure 3.1. La dissipation d’énergie du sol est prise en compte par
le biais du coefficient d'amortissement linéaire équivalent ξ défini comme étant le coefficient
d'amortissement qui induit la même énergie dissipée lors d'un cycle complet de chargement d'un sol. La
courbe 3.1-b montre la variation de Gsec et ξ en fonction de la distorsion γ.
Dynamique des Sols/ N.B.Romdhane 39

Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Compte tenu des temps de calcul importants induits par la première méthode, c’est l’analyse linéaire
équivalente qui est la plus utilisée en ingénierie parasismique (lorsque les conditions de tabularité des couches
sont remplies).
On s’efforcera donc dans ce qui suit d’estimer le module de cisaillement et l’amortissement correspondant
nécessaire à une analyse linéaire équivalente.
3.1 Estimation du module de cisaillement. 3.1.1 La méthode de,Hardin et Dnervich (1972). Le module de cisaillement sécant (ou effectif) est
représenté par une sécante en figure 1-a. Partant de plusieurs essais, Hardin et Dnervich (1972) ont conclu que
l’enveloppe du diagramme contrainte-déformation de cisaillement pour tous les sols pouvait être représentées par
une relation hyperbolique de la forme (figure 3.2,):
[3.2]
ultG τγ
γτ+
=
max
1
où : Gmax est le module de cisaillement maximal de la couche de sol correspondant à une
déformation unitaire en cisaillement très faible ;
et τult la contrainte ultime de rupture en cisaillement du sol.
Figure 3.2 : Définition de Gmax et G=Gsc.
En divisant l’équation [3.2] par γ et en posantmaxGult
rτ
γ = , la déformation unitaire de référence, on peut
exprimer le module de cisaillement Gsec=G normalisé en fonction de la déformation en cisaillement γ:
Dynamique des Sols/ N.B.Romdhane 40

Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
[3.3]
rG
G
γγ
+=
1
1max
La figure 3.3 montre la variation du module de cisaillement normalisé en fonction de la déformation de
cisaillement unitaire rγ
γ.
Figure 3.3 : Variation du module de cisaillement normalisé en fonction de la déformation de cisaillement
unitaire.
3.1.1.1 Détermination du module de cisaillement Gmax.
Plusieurs méthodes in-situ sont disponibles pour déterminer le module de cisaillement linéaire Gmax. Les
méthodes les plus utilisées mesurent la vitesse de propagation des ondes S, VS, au moyen d’un cross-hole ou
d’un down-hole (figure 3.4). On estime la vitesse de propagation VS par le temps mis par une onde S pour
parcourir une distance d entre l’émetteur et le récepteur. On en déduit Gmax= ρ. VS2 où ρ est la densité du sol.
On trouvera en §2.2 quelques relations empiriques exprimant Gmax à partir de résultats d’essais en laboratoire.
Figure 3.4 : Détermination des caractéristiques dynamiques des sols au moyen de méthodes sismiques.
Dynamique des Sols/ N.B.Romdhane 41

Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
3.1.1.2 Détermination de la résistance ultime en cisaillement des sols.
L’estimation de la déformation de cisaillement unitaire γr nécessite la connaissance de la résistance ultime τult.
On trouvera en §2.1.2 la détermination géométrique de τult :
[3.4] ( )[ ] ( )[ ] 2/122
'121cos.sin'.12
1⎭⎬⎫
⎩⎨⎧ −−++= oKocoKoult σφφστ
3.1.2 Approches expérimentales spécifiques (Vucetic et Dobri (1991), Seed et Idriss
(1970) etc…)
La méthode de Hardin et Dnervitch, comme nous venons de le voir, est une tentative de modélisation
mathématique de la courbe contrainte-déformation . Pour les codes de calcul 1D, tenant compte aussi bien de
l’analyse linéaire équivalente (EERA) que de l’analyse non linéaire (NERA), les variations du module de
cisaillement normalisé G/Gmax pour chaque couche doivent être données en fonction de la distorsion γ (Gmax
est calculé au moyen de Vs).. Plusieurs courbes normalisées donnant G/Gmax et le coefficient d'amortissement
D sont disponibles pour l'analyse de la réponse dynamique d’un sol [http://geoinfo.usc.edu/gees]. Ces courbes
sont essentiellement expérimentales et les déformations en distorsion dépassent rarement 1%, ce qui peut être
gênant dans le cas de simulation non linéaire. L'allure des courbes donnant les contraintes de cisaillement en
fonction de la distorsion en cas de chargement cyclique dépend en grande partie de l'indice de plasticité ( IP)
pour les sols cohérents et de la contrainte effective pour les sols pulvérulents. Enfin, une hypothèse
supplémentaire consiste à supposer que ces courbes restent inchangées lors de la mise en surpression de l'eau
interstitielle.
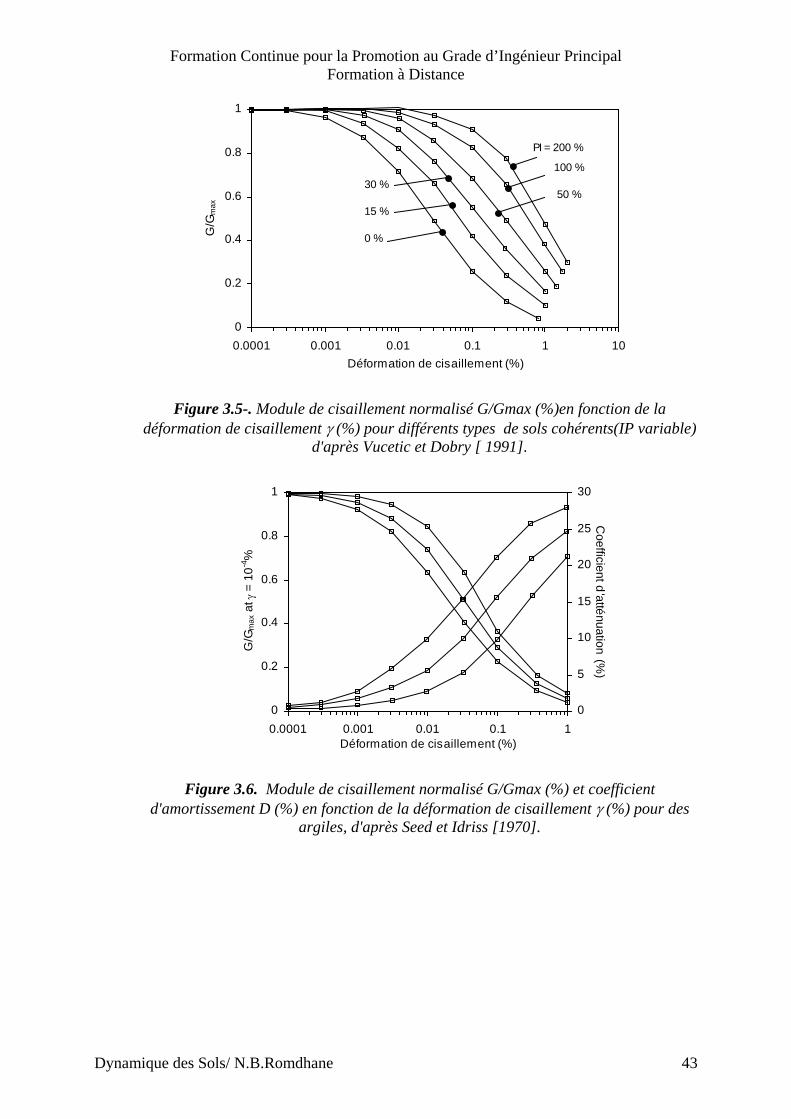
Vucetic et Dobry [1991] ont élaboré des courbes normalisées donnant G/Gmax pour différentes valeurs de IP
(figure 3.5) Quant aux argiles plus compactes, sables et encroutements sableux, des courbes expérimentales sont
également disponibles ; citons par exemple, celles établies par Seed et Idriss [1970] pour des argiles (figure3.6)
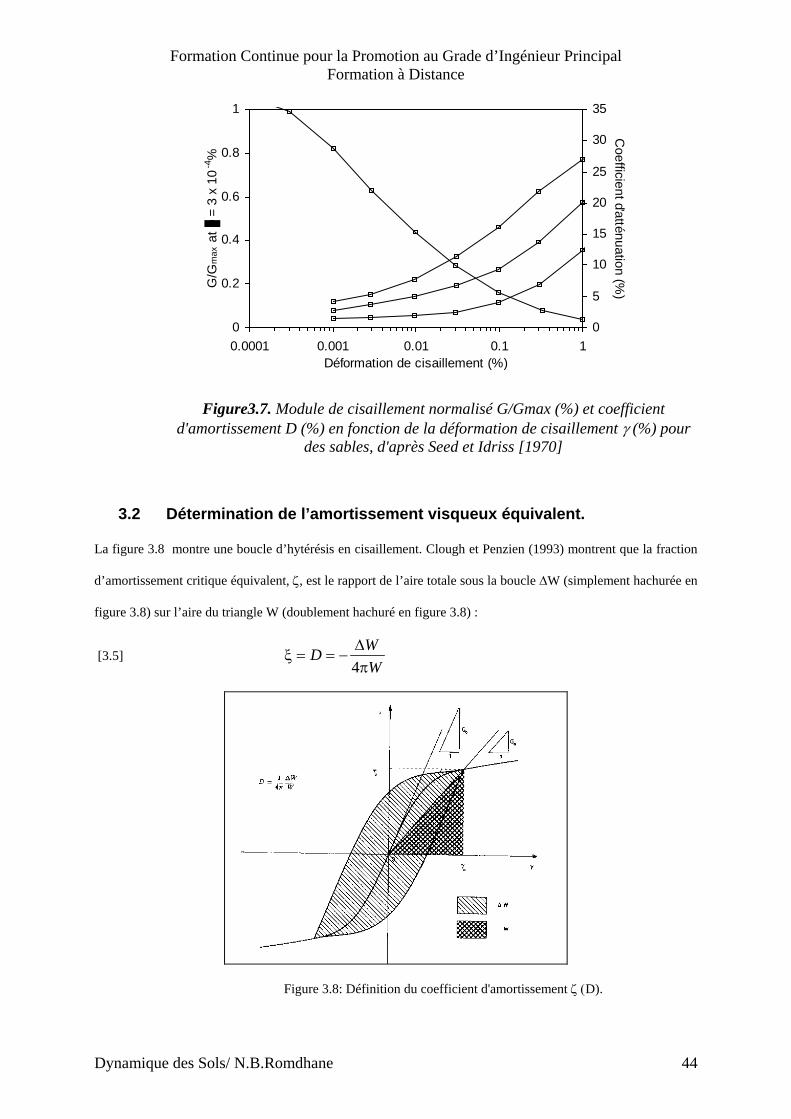
et des sables ayant différentes valeurs de pression de confinement et poids volumiques (figure 3.7).
Dynamique des Sols/ N.B.Romdhane 42
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
0
0.2
0.4
0.6
0.8
1
0.0001 0.001 0.01 0.1 1 10Déformation de cisaillement (%)
G/G
max
PI = 200 %
50 %
100 %30 %
15 %
0 %
Figure 3.5-. Module de cisaillement normalisé G/Gmax (%)en fonction de la déformation de cisaillement γ (%) pour différents types de sols cohérents(IP variable)
d'après Vucetic et Dobry [ 1991].
0
0.2
0.4
0.6
0.8
1
0.0001 0.001 0.01 0.1 1Déformation de cisaillement (%)
G/G
max
at γ
= 1
0-4%
0
5
10
15
20
25
30
Coefficient d
'atténuation (%)
Figure 3.6. Module de cisaillement normalisé G/Gmax (%) et coefficient d'amortissement D (%) en fonction de la déformation de cisaillement γ (%) pour des
argiles, d'après Seed et Idriss [1970].
Dynamique des Sols/ N.B.Romdhane 43
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
0
0.2
0.4
0.6
0.8
1
0.0001 0.001 0.01 0.1 1Déformation de cisaillement (%)
G/G
max
at
= 3
x 1
0-4
%
0
5
10
15
20
25
30
35
Coefficient d'atténuation (%
)
Figure3.7. Module de cisaillement normalisé G/Gmax (%) et coefficient d'amortissement D (%) en fonction de la déformation de cisaillement γ (%) pour
des sables, d'après Seed et Idriss [1970]
3.2 Détermination de l’amortissement visqueux équivalent.
La figure 3.8 montre une boucle d’hytérésis en cisaillement. Clough et Penzien (1993) montrent que la fraction
d’amortissement critique équivalent, ζ, est le rapport de l’aire totale sous la boucle ∆W (simplement hachurée en
figure 3.8) sur l’aire du triangle W (doublement hachuré en figure 3.8) :
[3.5] WWD
π∆
−==ξ4
Figure 3.8: Définition du coefficient d'amortissement ζ (D).
Dynamique des Sols/ N.B.Romdhane 44

Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
3.2.1 Approches de Hardin et Dnervitch (1972) Hardin et Dnervich (1972) proposent une
relation reliant l’amortissement ζ et le module de cisaillement G sous la forme :
[3.6] ⎟⎟⎠
⎞⎜⎜⎝
⎛−=
maxmax 1
GGζζ ,
où ζmax est la fraction d’amortissement maximale relative à G=0. La combinaison des équations [3.6] et
[3.3] permet d’exprimer directement la variation de l’amortissement normalisé en fonction de la
déformation unitaire de cisaillement :
[3.7]
r
r
γγ
γγ
ζζ
+=
1max
.
La figure 3.9 représente la variation de la fraction d’amortissement normalisé en fonction de la
déformation unitaire en cisaillement.
.
.
Figure 3.9 : Variation de la fraction d’amortissement normalisé (G/Gmax) en fonction de la déformation unitaire
en cisaillement.
3.2.2 Approches expérimentales spécifiques (Vucetic et Dobri (1991), Seed et Idriss
(1970) etc…)
Les codes de calcul (EERA et NERA, par exemple) nécessitent aussi la variation du coefficient d'amortissement
D en fonction de γ. (NERA l'estime à partir des courbes hystérétiques). Le figure 3.10 donne la variation du
Dynamique des Sols/ N.B.Romdhane 45
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
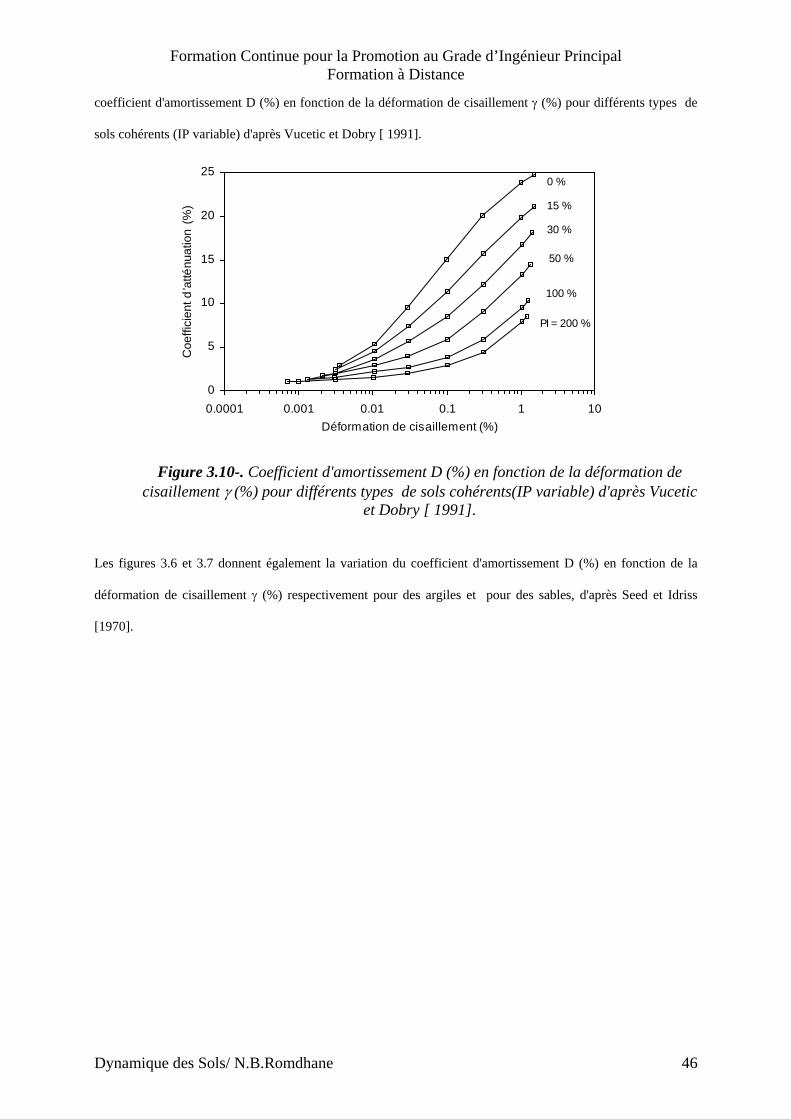
coefficient d'amortissement D (%) en fonction de la déformation de cisaillement γ (%) pour différents types de
sols cohérents (IP variable) d'après Vucetic et Dobry [ 1991].
0
5
10
15
20
25
0.0001 0.001 0.01 0.1 1 10Déformation de cisaillement (%)
Coe
ffici
ent d
'atté
nuat
ion
(%)
PI = 200 %
50 %
100 %
30 %
15 %
0 %
Figure 3.10-. Coefficient d'amortissement D (%) en fonction de la déformation de cisaillement γ (%) pour différents types de sols cohérents(IP variable) d'après Vucetic
et Dobry [ 1991].
Les figures 3.6 et 3.7 donnent également la variation du coefficient d'amortissement D (%) en fonction de la
déformation de cisaillement γ (%) respectivement pour des argiles et pour des sables, d'après Seed et Idriss
[1970].
Dynamique des Sols/ N.B.Romdhane 46
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Chapitre IV.
Réponse sismique d’un dépôt de sol: Effet de site sismique. Nous avons vu en chapitre I des exemples spectaculaires de l’amplification locale du signal sismique lors de sa
traversée des couches géologiques de sub-surface ( Mexico,1985 ; Northridge, 1994). Dans tous les cas, les sols
jeunes (cohérents, sous consolidés et meubles) furent responsables des amplifications enregistrées dans les très
basses fréquences (< 0.5 Hz). Il convient donc d’examiner attentivement l’influence d’un dépôt de sol s’il
constitue la fondation d’une structure. En ingénierie parasismique, lorsque la disposition des couches est
horizontale (structure dite tabulaire), on suppose que le comportement de chaque couche du sol est linéaire et
élastique. L’analyse de la réponse dynamique du dépôt de sol est alors possible si on développe un modèle à
masses concentrées. C’est la première partie de ce chapitre.
Plusieurs codes de calcul de la réponse sismique unidimensionnelle d’un sol sont disponibles. Nous en
présenterons deux dans ce chapitre, EERA et NERA.
Enfin, lorsque le site d’étude est situé aux abords d’un bassin sédimentaire, où l’hypothèse de tabularité n’est
plus respectée, l’analyse sismique unidimensionnelle n’a plus raison d’être : c’est le domaine du calcul
numérique 2D voire 3D. Nous introduirons succinctement ces notions en fin du présent chapitre.
4.1 Le modèle Unidimensionnel à masses concentrées.
4.1.1 Rappel de l’analyse dynamique d’une structure linéaire. Equations du
mouvement pour un système à plusieurs degrés de liberté dynamiques.
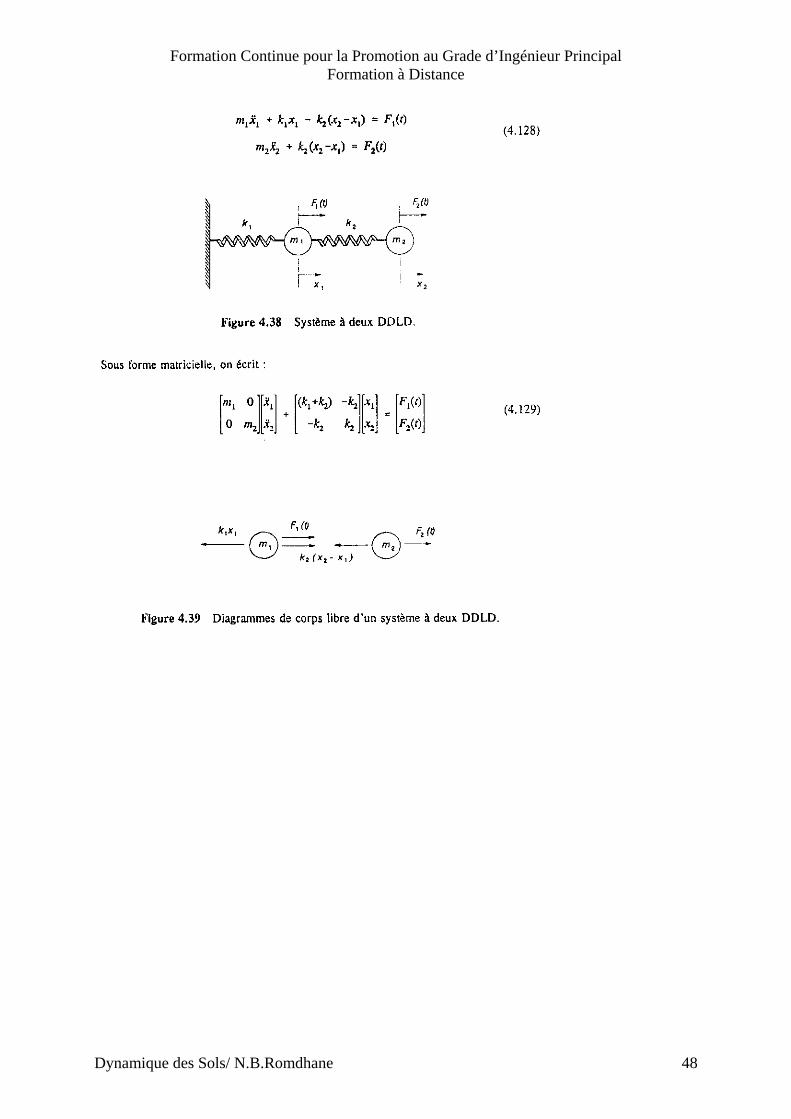
4.1.1.1 Cas d’un chargement dynamique quelconque
Dynamique des Sols/ N.B.Romdhane 47
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Dynamique des Sols/ N.B.Romdhane 48
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
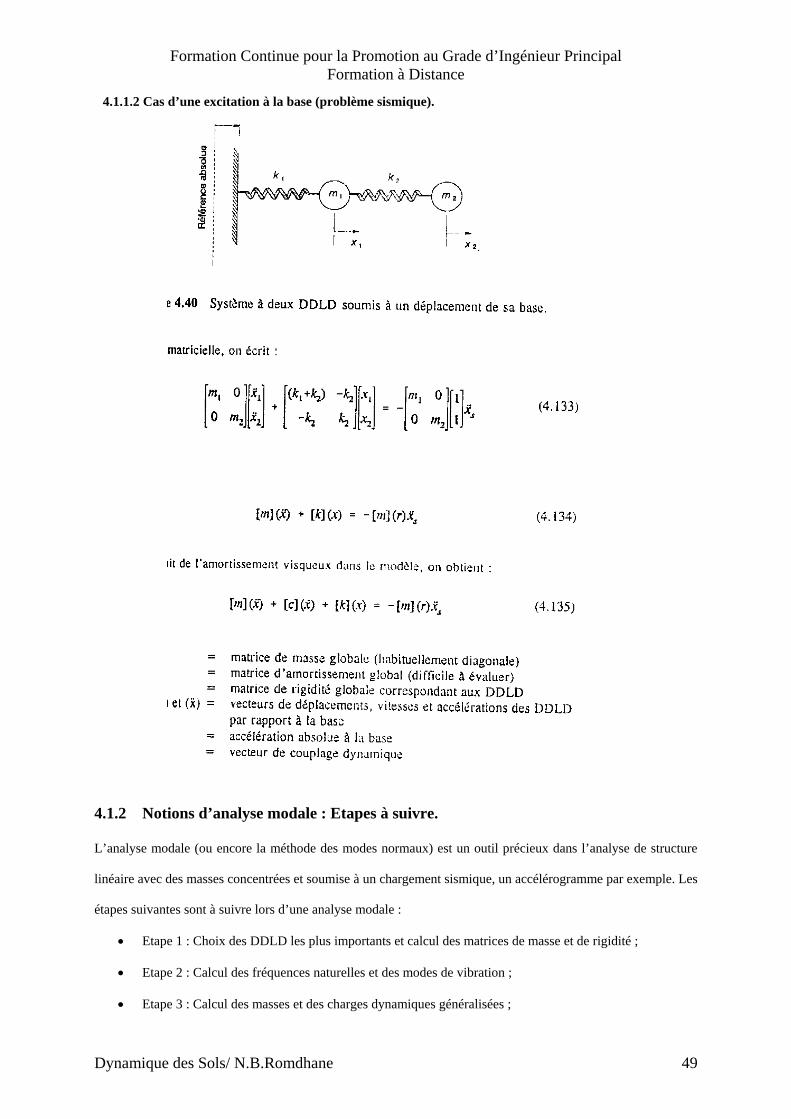
4.1.1.2 Cas d’une excitation à la base (problème sismique).
4.1.2 Notions d’analyse modale : Etapes à suivre.
L’analyse modale (ou encore la méthode des modes normaux) est un outil précieux dans l’analyse de structure
linéaire avec des masses concentrées et soumise à un chargement sismique, un accélérogramme par exemple. Les
étapes suivantes sont à suivre lors d’une analyse modale :
• Etape 1 : Choix des DDLD les plus importants et calcul des matrices de masse et de rigidité ;
• Etape 2 : Calcul des fréquences naturelles et des modes de vibration ;
• Etape 3 : Calcul des masses et des charges dynamiques généralisées ;
Dynamique des Sols/ N.B.Romdhane 49

Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
• Etape 4 : Calcul des conditions initiales ;
• Etape 5 : Calcul des réponses modales ;
• Etape 6 : Calcul des réponses dans les coordonnées réelles.
4.1.3 Analyse linéaire équivalente de la réponse sismique d’un dépôt avec modèle de
masses concentrées.
On se propose d’appliquer l’analyse modale à une succession de couches géologiques.
La figure 4.3 représente le modèle simple et équivalent d’un sol multicouches ; le milieu est supposé semi-infini
avec une largeur unitaire et une longueur infinie. La masse de sol du modèle est supposée concentrée à
l’intercouche comme suit :
[ 4.1] 2
111
hm
ρ= et
( )211_ hiih
m iii
ρρ += − pour i=2,3,….,N
où mi est la masse concentrée au-dessus de la couche i,
ρi la masse volumique de la couche de sol i et,
hi l’épaisseur de la couche de sol i.
Ces masses concentrées sont reliées par des ressorts et des amortisseurs qui résistent à la déformation latérale du
dépôt. Soit Fi la force horizontale nécessaire à la déformation horizontale xi ( figure 4.4) de la couche i (de
section unitaire : largeur x longueur), on peut écrire :
[4.2] ii
iiiii x
hG
GF === γτ .
où τi est la contrainte de cisaillement dans la couche i ;
γi, la déformation unitaire en cisaillement dans la couche i et,
Gi le module de cisaillement de la couche i.
Dynamique des Sols/ N.B.Romdhane 50

Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Figure 4.3 : Modèle équivalent d’un massif tabulaire multicouches.
Figure 4.4 : Force et déplacements dans une couche de sol.
La constante de rigidité ki du ressort i est alors :
[4.3] i
ii h
Gk = .
Les équations qui régissent le mouvement de toutes les couches de sol peuvent s’écrirent sous forme matricielle,
en considérant l’équilibre dynamique de chaque couche :
[4.4] [ ]( ) [ ]( ) [ ]( ) ( ) rxmxkxcxm &&&&& −=++
où : [m] est la matrice globale : ,
NxNNm
mm
m
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
0000...............0...000...000..00
3
2
1
Dynamique des Sols/ N.B.Romdhane 51

Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
[c] la matrice d’amortissement : ,
NxNNNN
N
cccc
ccccccc
cc
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
+−−
+−−+−
−
−1
322
2211
11
000............
0...00...0..0
[k] la matrice de rigidité globale : ,
NxNNNN
N
kkkk
kkkkkkk
kk
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
+−−
+−−+−
−
−1
322
2211
11
000............
0...00...0..0
( ) ( ) ( )xetxx &&& , les vecteurs accélérations, vitesses et déplacements horizontaux de chaque couche par rapport au
substratum rocheux et, l’accélérogramme enregistré sur le rocher. rx&&
L’analyse linéaire équivalente avec masses concentrées est un outil itératif pour l’estimation de la réponse d’un
sol multicouches tabulaire soumis à un accélérogramme à sa base rocheuse. Une telle analyse suit les étapes
suivantes :
4.1.3.1 Estimation des paramètres physiques du sol.
Pour chaque couche homogène, on doit estimer les paramètres physiques suivants (Cf chapitre III) :
• Le module de cisaillement maximum Gmax(i) ;
• L’amortissement critique maximum : ζmax(i),
• La résistance ultime au cisaillement : τult(i) ,
• La masse volumique : ρi,
• Et les courbes exprimant le module de cisaillement et l’amortissement normalisés, G/Gmax(i) et
ζ/ζmax(i) en fonction de la déformation de cisaillement unitaire rγ
γ. On rappelle que la déformation
unitaire de référence est de la forme :)max(
)()(
i
iultir G
τγ =
4.1.3.2 Fractionnement du sol.
Dynamique des Sols/ N.B.Romdhane 52
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
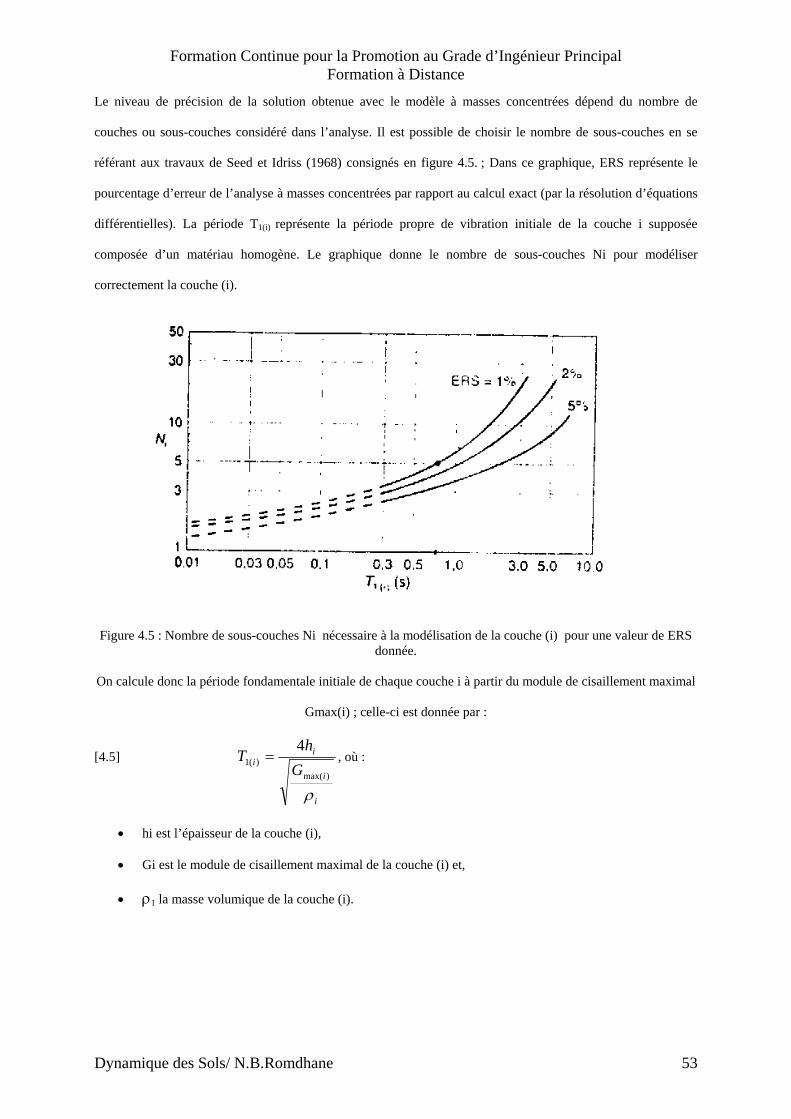
Le niveau de précision de la solution obtenue avec le modèle à masses concentrées dépend du nombre de
couches ou sous-couches considéré dans l’analyse. Il est possible de choisir le nombre de sous-couches en se
référant aux travaux de Seed et Idriss (1968) consignés en figure 4.5. ; Dans ce graphique, ERS représente le
pourcentage d’erreur de l’analyse à masses concentrées par rapport au calcul exact (par la résolution d’équations
différentielles). La période T1(i) représente la période propre de vibration initiale de la couche i supposée
composée d’un matériau homogène. Le graphique donne le nombre de sous-couches Ni pour modéliser
correctement la couche (i).
Figure 4.5 : Nombre de sous-couches Ni nécessaire à la modélisation de la couche (i) pour une valeur de ERS donnée.
On calcule donc la période fondamentale initiale de chaque couche i à partir du module de cisaillement maximal
Gmax(i) ; celle-ci est donnée par :
[4.5]
i
i
ii G
hT
ρ)max(
)(14
= , où :
• hi est l’épaisseur de la couche (i),
• Gi est le module de cisaillement maximal de la couche (i) et,
• ρ1 la masse volumique de la couche (i).
Dynamique des Sols/ N.B.Romdhane 53

Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
On choisit ensuite le nombre de sous-couches Ni de la couche (i) nécessaire pour une valeur de ERS donnée.
Le nombre total de couches est la somme de toutes les sous-couches : où Nm est le nombre de
couches formant le dépôt.
∑=Nm
NiN1
4.1.3.3 Equations du mouvement.
On calcule successivement :
• 2
111
hm ρ=
• ( )
211_ hiih
m iii
ρρ += − ,
• i
ii h
Gk =
• , et,
NxNNm
mm
m
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
0000...............0...000...000..00
3
2
1
NxNNNN
N
kkkk
kkkkkkk
kk
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
+−−
+−−+−
−
−1
322
2211
11
000............
0...00...0..0
• on assigne une fraction d’amortissement pour chaque mode de vibration.
4.1.3.4 Calcul de la réponse dynamique.
On utilise l’analyse modale de manière itérative pour calculer la solution des équations du mouvement :
[4.6] [ ]( ) [ ]( ) [ ]( ) ( ) rxmxkxcxm &&&&& −=++
- Calcul des déformations unitaires en cisaillement maximum.
Pour chaque couche (i), on calcule les déformations unitaires en cisaillement maximum,
[4.7] i
iii h
txtxmax1
)max(
)()( +−=γ .
- Mise à jour de la rigidité effective.
A partir du calcul des déformations unitaires en cisaillement maximum (§4.1.5), on actualise le module de
cisaillement Gi de chaque couche. Faisant l’hypothèse que les niveaux maximums de déformation sont atteints
une seule fois pendant la réponse dynamique, on adopte un niveau de déformation globale de la couche (i) égal à
2/3 des valeurs maximales :
Dynamique des Sols/ N.B.Romdhane 54

Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
[4.8]
)()(1
)max(
iriiGGi
γγ
+= où )max(3
2)( ii γγ =
- Mise à jour de l’amortissement effectif équivalent.
De la même manière que précédemment, on actualise l’amortissement effectif de chaque couche (i). On utilise
une fraction (2/3, par exemple) des valeurs maximales :
[4.9]
)(
)max(
)(
)max(
)(max
32
1
32
.
i
i
i
i
i
r
ri
γ
γ
γγ
ζζ
+
=
- Itération.
On réitère les étapes 4.1.3 à 4.1.7 jusqu’à convergence des rigidités et des amortissements. Quelques itérations
suffisent pour cela.
4.1.4 Analyse de la réponse d’un sol : Etude d’un exemple.
On se propose d’estimer la réponse dynamique d’un dépôt d’argile d’épaisseur 16m reposant sur un substratum
rocheux à Mexico City et soumis au séisme de Michuocan de 1985. On dispose des données suivantes relatives à
la formation :
Gmax= 24000 kPa ;
La contrainte ultime de rupture au cisaillement de la couche : τult : 30 kPa ;
La masse volumique ρ = 18 kN/m3 et ;
L’amortissement critique ζmax= 25%.
On fait l’hypothèse que le comportement du sol obéit parfaitement à la loi hyperbolique
( r
h γγγ = ).
1. Le séisme aurait été provoqué par la subduction de la plaque des Cocos.
Rappeler la signification d’une plaque ainsi que le phénomène de subduction. Pourquoi une plaque
océanique coule-t-elle sous une plaque continentale ?
Qu’en est–il lors de l’affrontement de deux plaques continentales ? donner un exemple.
Dynamique des Sols/ N.B.Romdhane 55

Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
2. La position du foyer a été calculée à partir de trois stations (Hawaï, UNAM et SCT). Rappeler la méthode de
calcul (faire une figure) .
3. Calculer la matrice de masses et la matrice de rigidité en utilisant le modèle de masses concentrées. On désire
garder une précision de calculs inférieure à 5% ( ERS= 5%).
4. Pour calculer la réponse dynamique du dépôt, on emploie l’analyse modale de façon itérative. Le sommaire de
l’analyse dynamique linéaire équivalente est donné en tableau 1. Expliquer les différentes étapes de calcul qui y
ont aboutit.
5. Calculer la contrainte de cisaillement maximale dans chaque couche considérée.
Tableau 1.
Itération
N°
G1 (kPa) G2 (kPa) G3 (kPa) ζ ∗
(%)
γ 1max γ2max γ 3max
1 24000 24000 24000 0 0.0057 0.0129 0.0168
2 5 938 3 038 2 402 21 0.0014 0.0069 0.00113
3 14 282 5 170 3 414 20 0.0006 0.0041 0.0089
4 18 747 7 520 4 208 17 0.0005 0.0036 0.0099
5 19 045 8 244 3 810 16 0.0005 0.0030 0.0105
6 19 478 9 217 3 645 15 0.0005 0.0029 0.0110
7 19 244 9 524 3 506 15
• basé sur 2/3γ2max
Le calcul se fait en étapes successives :
• Etape 1 : Calcul de la déformation unitaire de référence, γr :
00125.024000
30==
kPakPa
rγ
• Etape 2 : Calcul de la période fondamentale initiale du dépôt de sol :
s
mkNsmkPa
mxT 56.0
/18)/81.9)(24000(
164
2
21 ==
Dynamique des Sols/ N.B.Romdhane 56

Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Si on désire garder une précision de calcul de l’ordre de 5% (ERS=5%), on devrait diviser le dépôt en trois
couches.
• Etape 3 : Calcul des matrices de masse et de rigidité:
o 32
2
311
1 /89.4)/81.9(2
)33.5)(/18(2
mkNssm
mmkNhm ===
ρ
o ( ) 32
13211_ /78.922
mkNsmmmhiih
m iii ====
+= − ρρ
,
o m
kPaGhG
k i
i
ii 33.5
)(==
o [ ] 3
322
2211
11
0
0
33.51
mkN
GGGGGGG
GGk
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
+−−+−
−=
• Etape 4 : Analyse Modale.
Pour calculer la réponse dynamique du dépôt, on emploie l’analyse modale de façon itérative. A chaque
itération, on met à jour :
• le module de cisaillement de chaque couche, Gi ;
• et la fraction d’amortissement critique pour les trois modes de vibration, ξ,
et ce, pour les trois modes de vibration en utilisant les équations :
•
)()(1
)max(
iriiGGi
γγ
+= où )max(3
2)( ii γγ = ;
et
)(
)max(
)(
)max(
)(max
32
1
32
.
i
i
i
i
i
r
ri
γ
γ
γγ
ζζ
+
=
• Etape 5 : Analyse Modale (suite).
Le sommaire de l’analyse modale itérative est donné en tableau 2 ci-dessous :
Dynamique des Sols/ N.B.Romdhane 57
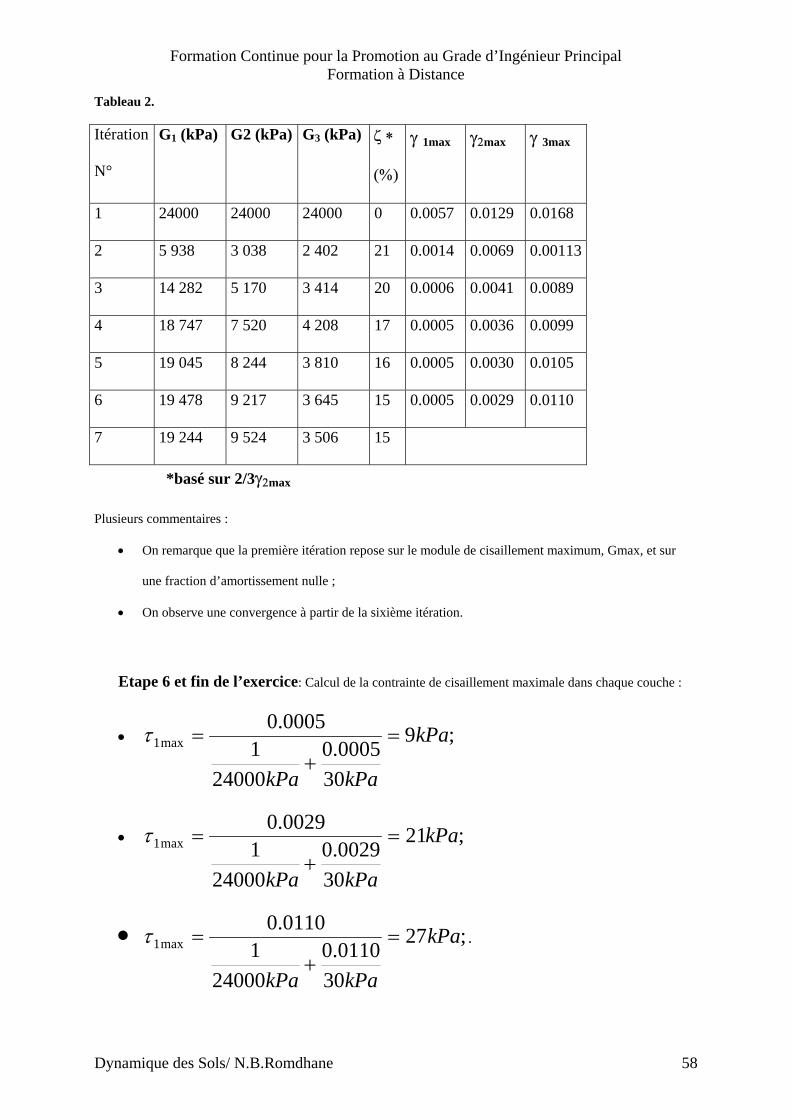
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Tableau 2.
Itération
N°
G1 (kPa) G2 (kPa) G3 (kPa) ζ ∗
(%)
γ 1max γ2max γ 3max
1 24000 24000 24000 0 0.0057 0.0129 0.0168
2 5 938 3 038 2 402 21 0.0014 0.0069 0.00113
3 14 282 5 170 3 414 20 0.0006 0.0041 0.0089
4 18 747 7 520 4 208 17 0.0005 0.0036 0.0099
5 19 045 8 244 3 810 16 0.0005 0.0030 0.0105
6 19 478 9 217 3 645 15 0.0005 0.0029 0.0110
7 19 244 9 524 3 506 15
*basé sur 2/3γ2max
Plusieurs commentaires :
• On remarque que la première itération repose sur le module de cisaillement maximum, Gmax, et sur
une fraction d’amortissement nulle ;
• On observe une convergence à partir de la sixième itération.
Etape 6 et fin de l’exercice: Calcul de la contrainte de cisaillement maximale dans chaque couche :
• ;9
300005.0
240001
0005.0max1 kPa
kPakPa
=+
=τ
• ;21
300029.0
240001
0029.0max1 kPa
kPakPa
=+
=τ
• ;27
300110.0
240001
0110.0max1 kPa
kPakPa
=+
=τ .
Dynamique des Sols/ N.B.Romdhane 58
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
4.1.5 Conclusion (under construction).
4.1.6 Evaluation.
On se propose d’estimer la réponse dynamique d’un dépôt d’alluvions d’épaisseur 20m reposant sur un
substratum rocheux à Bab el Oued et soumis au séisme de Zammoura de mai 2003. On dispose des données
suivantes relatives à la formation :
Gmax= 22000 kPa ;
La contrainte ultime de rupture au cisaillement de la couche : τult : 25 kPa ;
La masse volumique ρ = 19 kN/m3 et ;
L’amortissement critique ζmax= 20%.
On fait l’hypothèse que le comportement du sol obéit parfaitement à la loi hyperbolique ( r
h γγγ = ).
1. Le séisme aurait été provoqué par la remontée de la plaque africaine vers la plaque
eurasiatique.
Rappeler la signification d’une plaque. S’agit-il selon vous d’une acrétion ou d’une
subduction? Rappelez la signification de ces termes.
2. Trois trains d’ondes sont générées successivement lors d’un séisme ( donner un titre à la
figure 4.6). Les définir et les caractériser en terme de contenu fréquentiel, d’amplitude et
d’atténuation. Préciser le train d’onde le plus destructeur. Pourquoi ?
3. Trois paramètres caractérisent le mouvement sismique. Les préciser. Citer le paramètre le
plus utilisé en analyse modale.
4. Citer trois méthodes d’estimation de Gmax.
5. Calculer la matrice de masses et la matrice de rigidité en utilisant le modèle de masses
concentrées. On désire garder une précision de calculs inférieure à 5% ( ERS= 5%). Calculer
pour cela la fréquence de résonance de la colonne de sol.
6. Quels sont les bâtiments d’Alger (en terme de nombre d’étages) , qui selon vous, auraient
souffert le plus ? Justifier votre avis.
7. Pour calculer la réponse dynamique du dépôt, on emploie l’analyse modale de façon
itérative. Un exemple d’analyse dynamique linéaire équivalente est donné en tableau 3.
Expliquer les différentes étapes de calcul qui y ont aboutit.
8. Donner la contrainte de cisaillement maximale dans chaque couche considérée.
Dynamique des Sols/ N.B.Romdhane 59
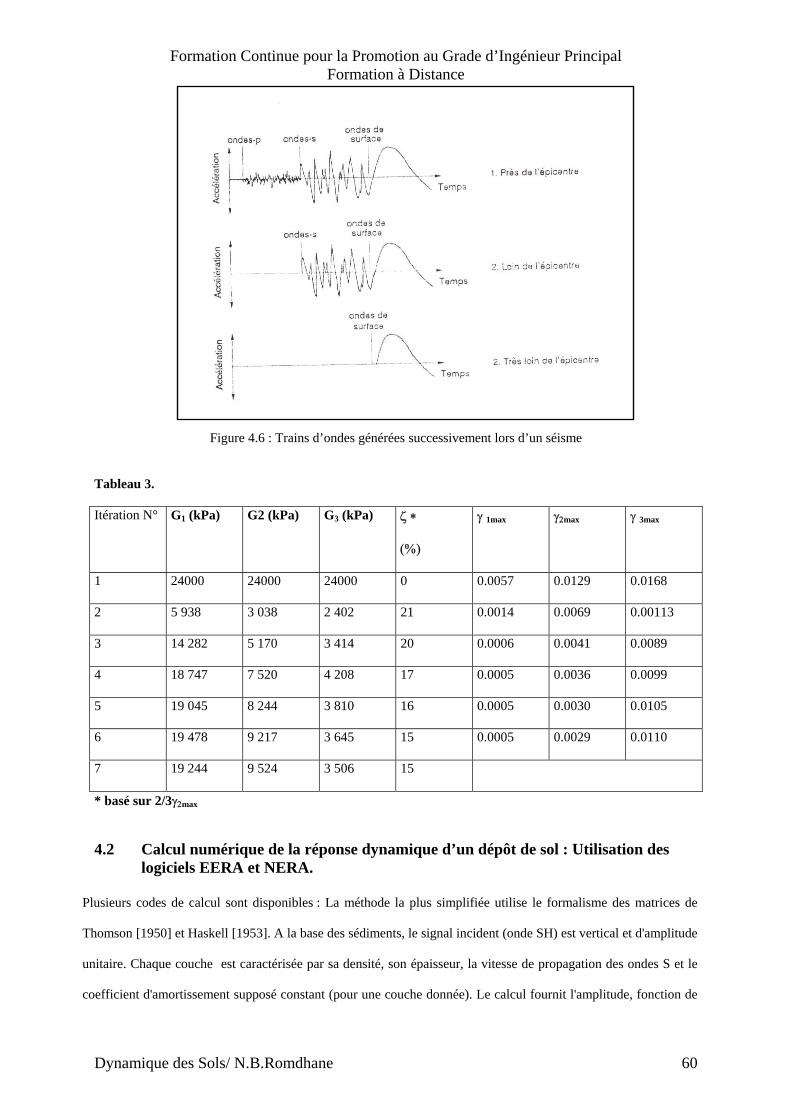
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Figure 4.6 : Trains d’ondes générées successivement lors d’un séisme
Tableau 3.
Itération N° G1 (kPa) G2 (kPa) G3 (kPa) ζ ∗
(%)
γ 1max γ2max γ 3max
1 24000 24000 24000 0 0.0057 0.0129 0.0168
2 5 938 3 038 2 402 21 0.0014 0.0069 0.00113
3 14 282 5 170 3 414 20 0.0006 0.0041 0.0089
4 18 747 7 520 4 208 17 0.0005 0.0036 0.0099
5 19 045 8 244 3 810 16 0.0005 0.0030 0.0105
6 19 478 9 217 3 645 15 0.0005 0.0029 0.0110
7 19 244 9 524 3 506 15
* basé sur 2/3γ2max
4.2 Calcul numérique de la réponse dynamique d’un dépôt de sol : Utilisation des
logiciels EERA et NERA.
Plusieurs codes de calcul sont disponibles : La méthode la plus simplifiée utilise le formalisme des matrices de
Thomson [1950] et Haskell [1953]. A la base des sédiments, le signal incident (onde SH) est vertical et d'amplitude
unitaire. Chaque couche est caractérisée par sa densité, son épaisseur, la vitesse de propagation des ondes S et le
coefficient d'amortissement supposé constant (pour une couche donnée). Le calcul fournit l'amplitude, fonction de
Dynamique des Sols/ N.B.Romdhane 60
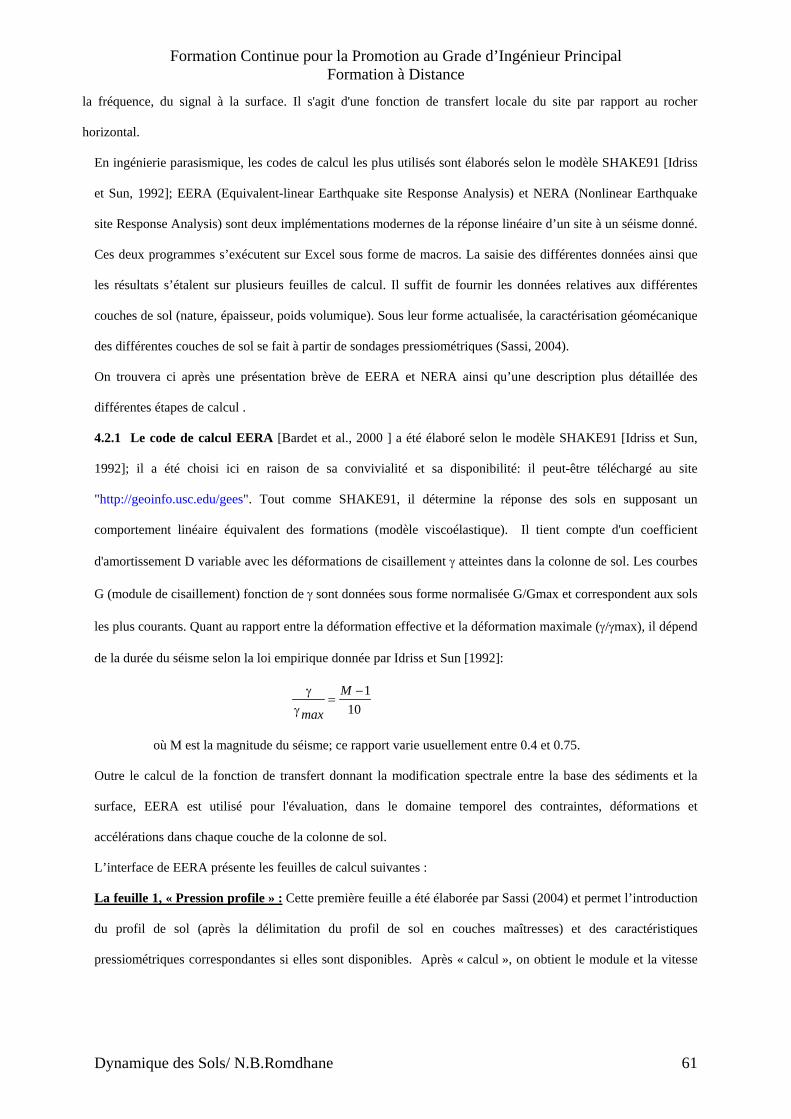
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
la fréquence, du signal à la surface. Il s'agit d'une fonction de transfert locale du site par rapport au rocher
horizontal.
En ingénierie parasismique, les codes de calcul les plus utilisés sont élaborés selon le modèle SHAKE91 [Idriss
et Sun, 1992]; EERA (Equivalent-linear Earthquake site Response Analysis) et NERA (Nonlinear Earthquake
site Response Analysis) sont deux implémentations modernes de la réponse linéaire d’un site à un séisme donné.
Ces deux programmes s’exécutent sur Excel sous forme de macros. La saisie des différentes données ainsi que
les résultats s’étalent sur plusieurs feuilles de calcul. Il suffit de fournir les données relatives aux différentes
couches de sol (nature, épaisseur, poids volumique). Sous leur forme actualisée, la caractérisation géomécanique
des différentes couches de sol se fait à partir de sondages pressiométriques (Sassi, 2004).
On trouvera ci après une présentation brève de EERA et NERA ainsi qu’une description plus détaillée des
différentes étapes de calcul .
4.2.1 Le code de calcul EERA [Bardet et al., 2000 ] a été élaboré selon le modèle SHAKE91 [Idriss et Sun,
1992]; il a été choisi ici en raison de sa convivialité et sa disponibilité: il peut-être téléchargé au site
"http://geoinfo.usc.edu/gees". Tout comme SHAKE91, il détermine la réponse des sols en supposant un
comportement linéaire équivalent des formations (modèle viscoélastique). Il tient compte d'un coefficient
d'amortissement D variable avec les déformations de cisaillement γ atteintes dans la colonne de sol. Les courbes
G (module de cisaillement) fonction de γ sont données sous forme normalisée G/Gmax et correspondent aux sols
les plus courants. Quant au rapport entre la déformation effective et la déformation maximale (γ/γmax), il dépend
de la durée du séisme selon la loi empirique donnée par Idriss et Sun [1992]:
101−
=γ
γ M
max
où M est la magnitude du séisme; ce rapport varie usuellement entre 0.4 et 0.75.
Outre le calcul de la fonction de transfert donnant la modification spectrale entre la base des sédiments et la
surface, EERA est utilisé pour l'évaluation, dans le domaine temporel des contraintes, déformations et
accélérations dans chaque couche de la colonne de sol.
L’interface de EERA présente les feuilles de calcul suivantes :
La feuille 1, « Pression profile » : Cette première feuille a été élaborée par Sassi (2004) et permet l’introduction
du profil de sol (après la délimitation du profil de sol en couches maîtresses) et des caractéristiques
pressiométriques correspondantes si elles sont disponibles. Après « calcul », on obtient le module et la vitesse
Dynamique des Sols/ N.B.Romdhane 61
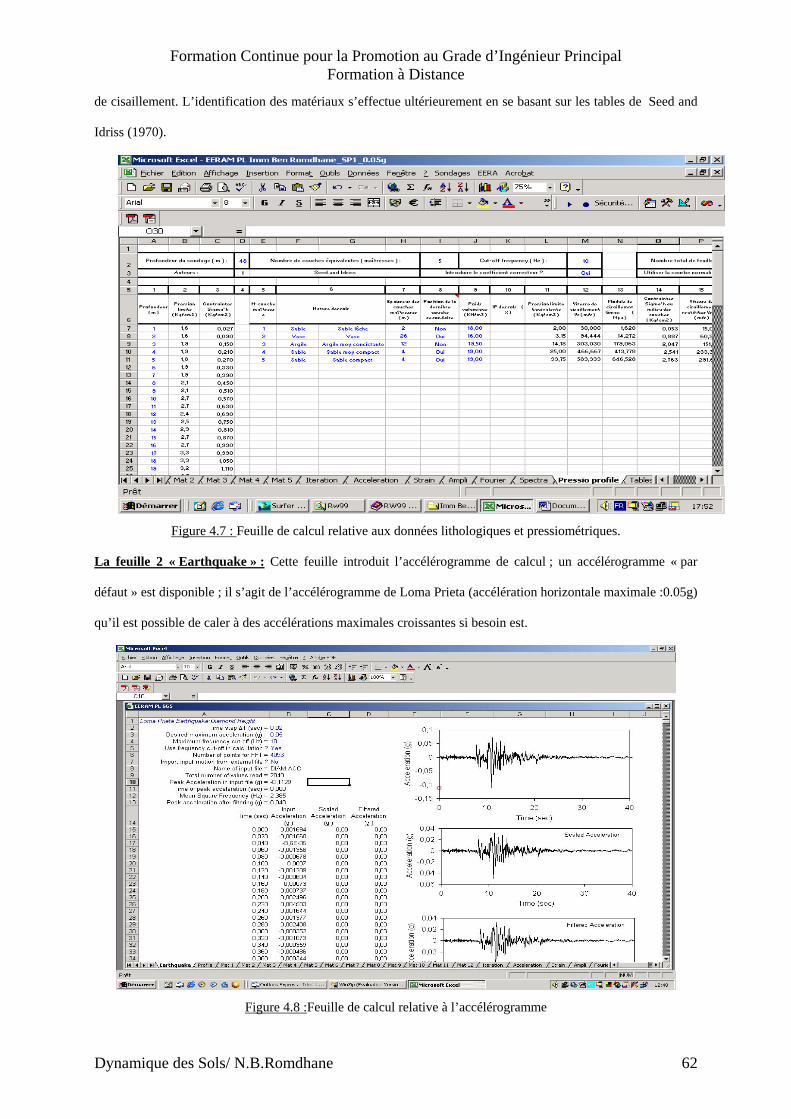
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
de cisaillement. L’identification des matériaux s’effectue ultérieurement en se basant sur les tables de Seed and
Idriss (1970).
Figure 4.7 : Feuille de calcul relative aux données lithologiques et pressiométriques.
La feuille 2 « Earthquake » : Cette feuille introduit l’accélérogramme de calcul ; un accélérogramme « par
défaut » est disponible ; il s’agit de l’accélérogramme de Loma Prieta (accélération horizontale maximale :0.05g)
qu’il est possible de caler à des accélérations maximales croissantes si besoin est.
Figure 4.8 :Feuille de calcul relative à l’accélérogramme
Dynamique des Sols/ N.B.Romdhane 62
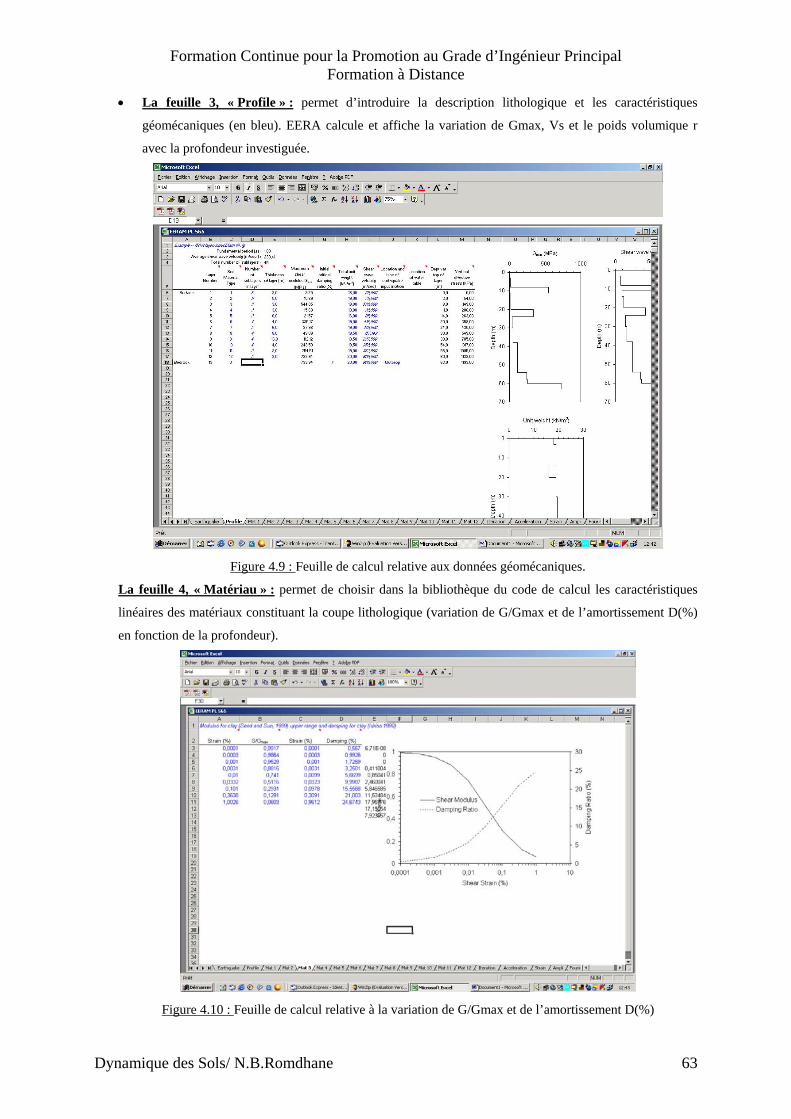
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
• La feuille 3, « Profile » : permet d’introduire la description lithologique et les caractéristiques
géomécaniques (en bleu). EERA calcule et affiche la variation de Gmax, Vs et le poids volumique r
avec la profondeur investiguée.
Figure 4.9 : Feuille de calcul relative aux données géomécaniques.
La feuille 4, « Matériau » : permet de choisir dans la bibliothèque du code de calcul les caractéristiques
linéaires des matériaux constituant la coupe lithologique (variation de G/Gmax et de l’amortissement D(%)
en fonction de la profondeur).
Figure 4.10 : Feuille de calcul relative à la variation de G/Gmax et de l’amortissement D(%)
Dynamique des Sols/ N.B.Romdhane 63
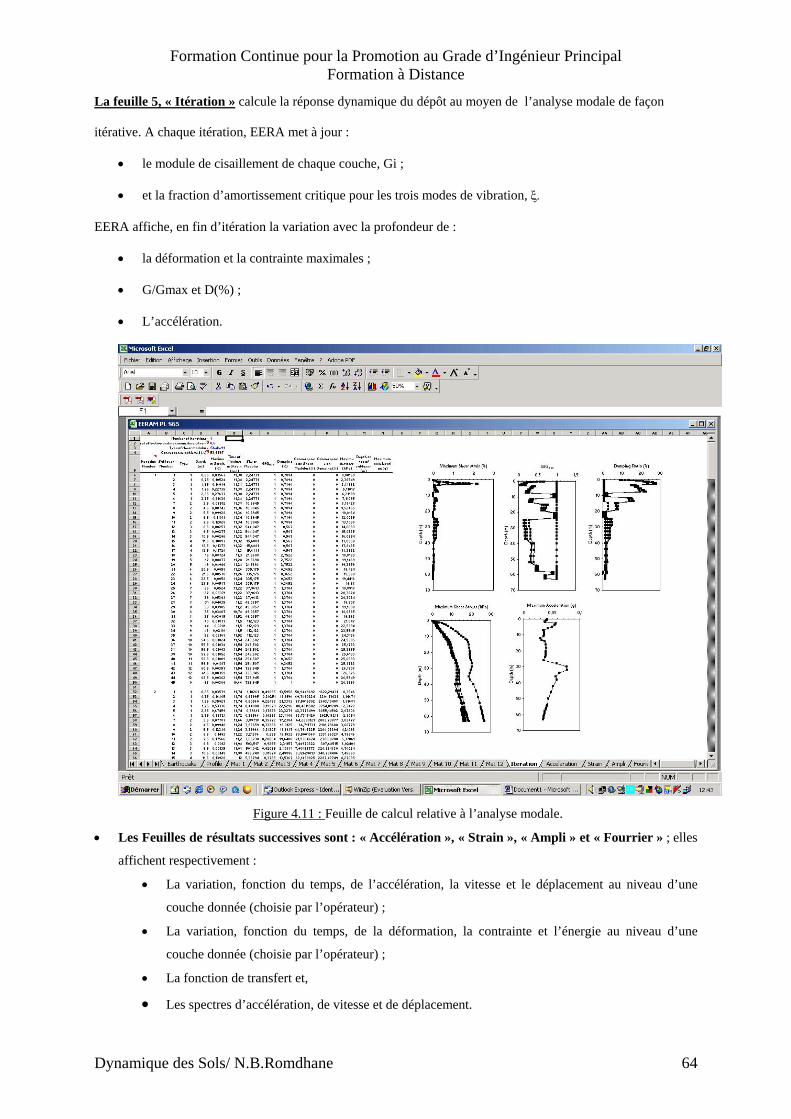
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
La feuille 5, « Itération » calcule la réponse dynamique du dépôt au moyen de l’analyse modale de façon
itérative. A chaque itération, EERA met à jour :
• le module de cisaillement de chaque couche, Gi ;
• et la fraction d’amortissement critique pour les trois modes de vibration, ξ.
EERA affiche, en fin d’itération la variation avec la profondeur de :
• la déformation et la contrainte maximales ;
• G/Gmax et D(%) ;
• L’accélération.
Figure 4.11 : Feuille de calcul relative à l’analyse modale.
• Les Feuilles de résultats successives sont : « Accélération », « Strain », « Ampli » et « Fourrier » ; elles
affichent respectivement :
• La variation, fonction du temps, de l’accélération, la vitesse et le déplacement au niveau d’une
couche donnée (choisie par l’opérateur) ;
• La variation, fonction du temps, de la déformation, la contrainte et l’énergie au niveau d’une
couche donnée (choisie par l’opérateur) ;
• La fonction de transfert et,
• Les spectres d’accélération, de vitesse et de déplacement.
Dynamique des Sols/ N.B.Romdhane 64
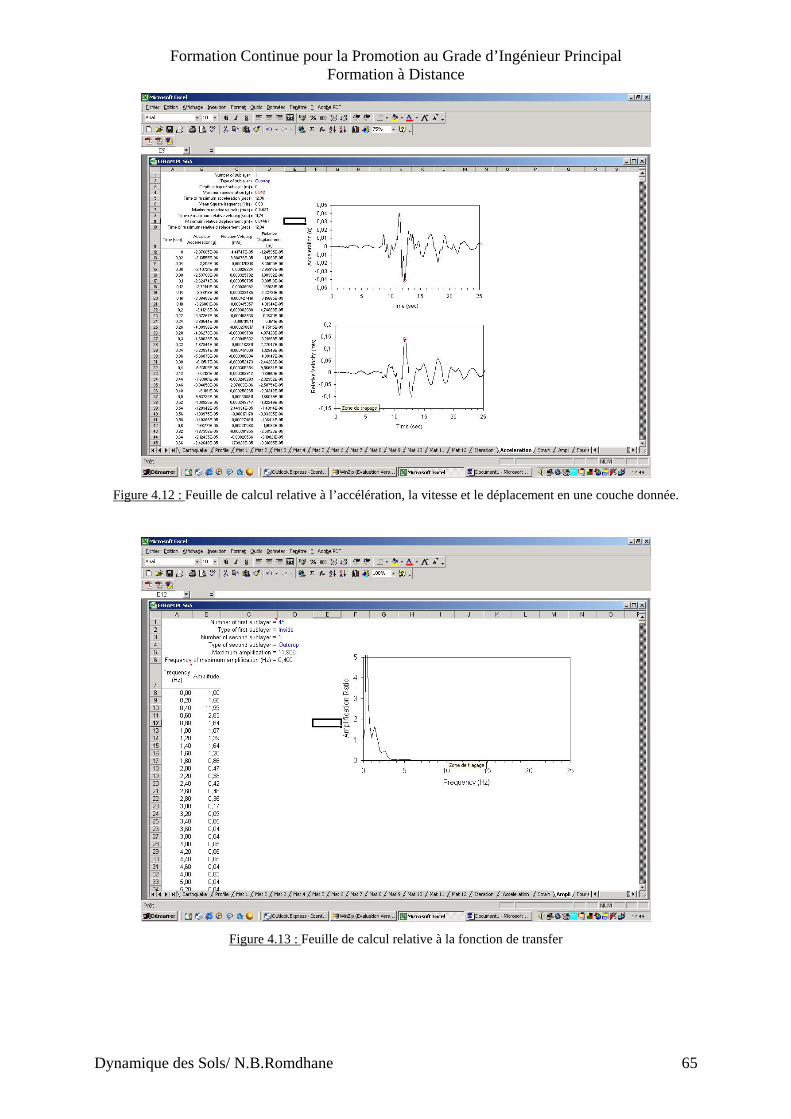
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Figure 4.12 : Feuille de calcul relative à l’accélération, la vitesse et le déplacement en une couche donnée.
Figure 4.13 : Feuille de calcul relative à la fonction de transfer
Dynamique des Sols/ N.B.Romdhane 65
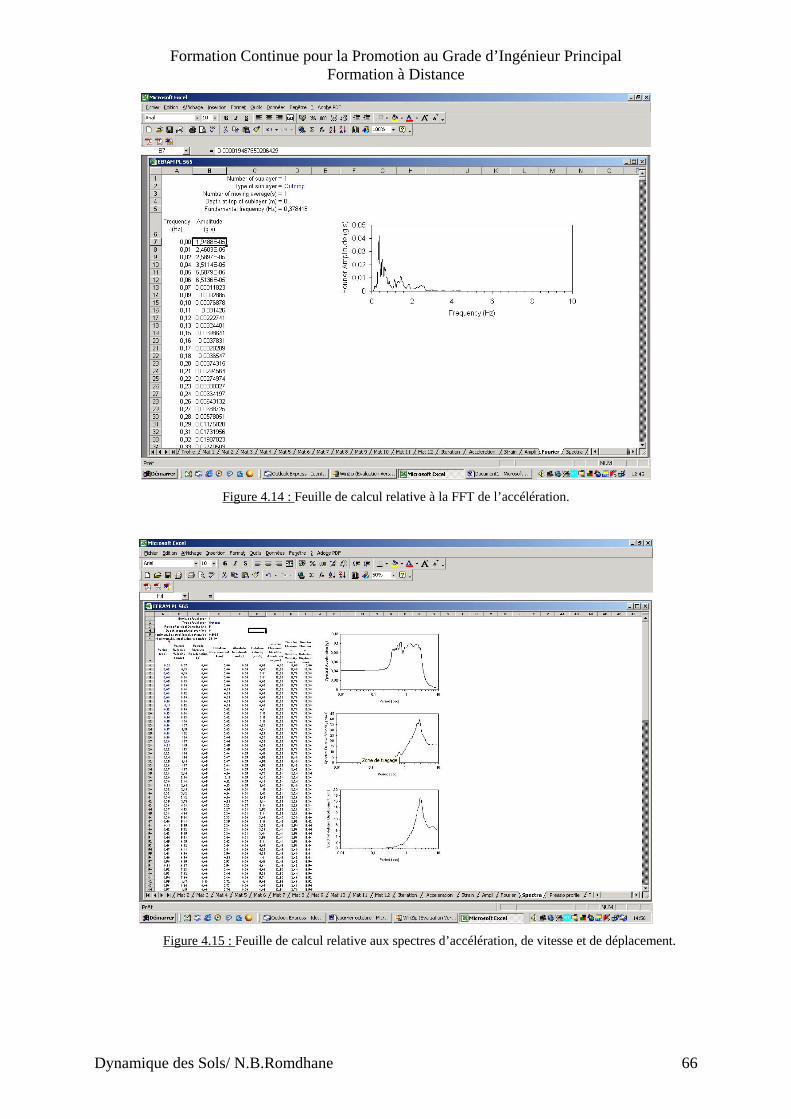
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Figure 4.14 : Feuille de calcul relative à la FFT de l’accélération.
Figure 4.15 : Feuille de calcul relative aux spectres d’accélération, de vitesse et de déplacement.
Dynamique des Sols/ N.B.Romdhane 66
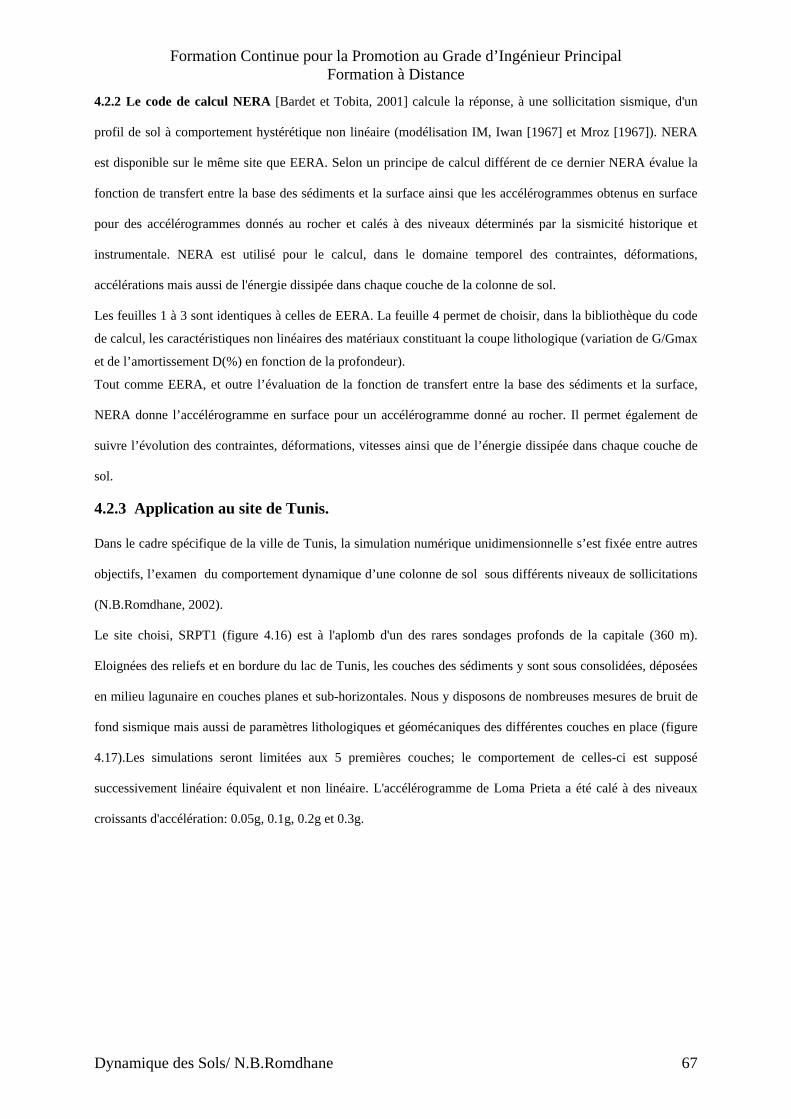
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
4.2.2 Le code de calcul NERA [Bardet et Tobita, 2001] calcule la réponse, à une sollicitation sismique, d'un
profil de sol à comportement hystérétique non linéaire (modélisation IM, Iwan [1967] et Mroz [1967]). NERA
est disponible sur le même site que EERA. Selon un principe de calcul différent de ce dernier NERA évalue la
fonction de transfert entre la base des sédiments et la surface ainsi que les accélérogrammes obtenus en surface
pour des accélérogrammes donnés au rocher et calés à des niveaux déterminés par la sismicité historique et
instrumentale. NERA est utilisé pour le calcul, dans le domaine temporel des contraintes, déformations,
accélérations mais aussi de l'énergie dissipée dans chaque couche de la colonne de sol.
Les feuilles 1 à 3 sont identiques à celles de EERA. La feuille 4 permet de choisir, dans la bibliothèque du code
de calcul, les caractéristiques non linéaires des matériaux constituant la coupe lithologique (variation de G/Gmax
et de l’amortissement D(%) en fonction de la profondeur). Tout comme EERA, et outre l’évaluation de la fonction de transfert entre la base des sédiments et la surface,
NERA donne l’accélérogramme en surface pour un accélérogramme donné au rocher. Il permet également de
suivre l’évolution des contraintes, déformations, vitesses ainsi que de l’énergie dissipée dans chaque couche de
sol.
4.2.3 Application au site de Tunis.
Dans le cadre spécifique de la ville de Tunis, la simulation numérique unidimensionnelle s’est fixée entre autres
objectifs, l’examen du comportement dynamique d’une colonne de sol sous différents niveaux de sollicitations
(N.B.Romdhane, 2002).
Le site choisi, SRPT1 (figure 4.16) est à l'aplomb d'un des rares sondages profonds de la capitale (360 m).
Eloignées des reliefs et en bordure du lac de Tunis, les couches des sédiments y sont sous consolidées, déposées
en milieu lagunaire en couches planes et sub-horizontales. Nous y disposons de nombreuses mesures de bruit de
fond sismique mais aussi de paramètres lithologiques et géomécaniques des différentes couches en place (figure
4.17).Les simulations seront limitées aux 5 premières couches; le comportement de celles-ci est supposé
successivement linéaire équivalent et non linéaire. L'accélérogramme de Loma Prieta a été calé à des niveaux
croissants d'accélération: 0.05g, 0.1g, 0.2g et 0.3g.
Dynamique des Sols/ N.B.Romdhane 67
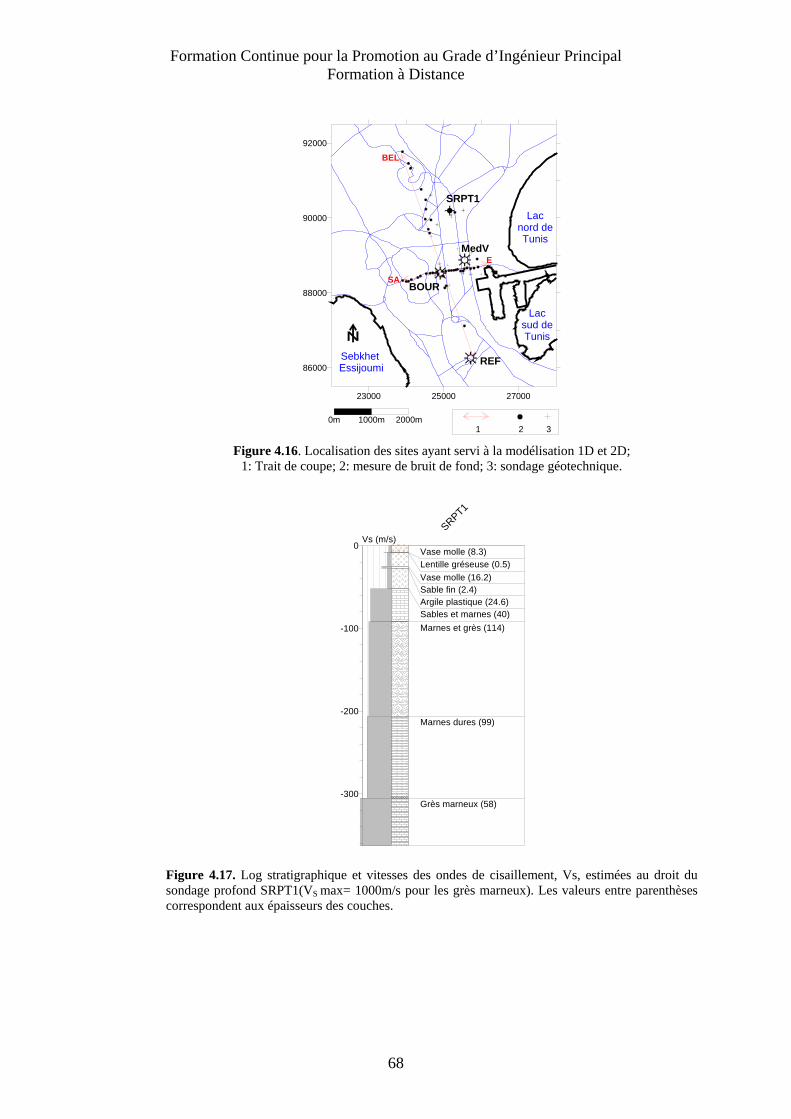
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
23000 25000 27000
86000
88000
90000
92000
1 2 3
SRPT1
MedV
REF
BOUR
BEL
E
SA
Lacnord deTunis
Sebkhet Essijoumi
Lacsud deTunis
0m 1000m 2000m
Figure 4.16. Localisation des sites ayant servi à la modélisation 1D et 2D; 1: Trait de coupe; 2: mesure de bruit de fond; 3: sondage géotechnique.
Vs (m/s)0
-100
-200
-300
Vase molle (8.3)Lentille gréseuse (0.5)Vase molle (16.2)Sable fin (2.4)Argile plastique (24.6)Sables et marnes (40)Marnes et grès (114)
Marnes dures (99)
Grès marneux (58)
SRPT1
Figure 4.17. Log stratigraphique et vitesses des ondes de cisaillement, Vs, estimées au droit du sondage profond SRPT1(VS max= 1000m/s pour les grès marneux). Les valeurs entre parenthèses correspondent aux épaisseurs des couches.
68
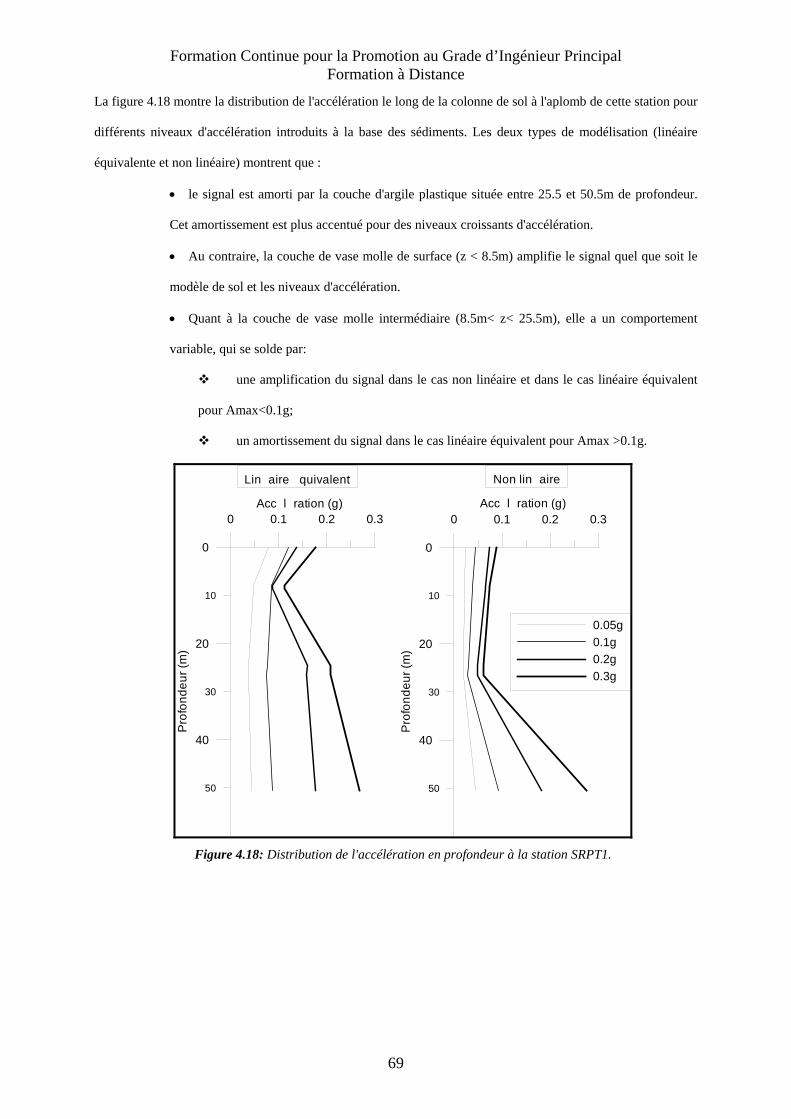
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
La figure 4.18 montre la distribution de l'accélération le long de la colonne de sol à l'aplomb de cette station pour
différents niveaux d'accélération introduits à la base des sédiments. Les deux types de modélisation (linéaire
équivalente et non linéaire) montrent que :
• le signal est amorti par la couche d'argile plastique située entre 25.5 et 50.5m de profondeur.
Cet amortissement est plus accentué pour des niveaux croissants d'accélération.
• Au contraire, la couche de vase molle de surface (z < 8.5m) amplifie le signal quel que soit le
modèle de sol et les niveaux d'accélération.
• Quant à la couche de vase molle intermédiaire (8.5m< z< 25.5m), elle a un comportement
variable, qui se solde par:
une amplification du signal dans le cas non linéaire et dans le cas linéaire équivalent
pour Amax<0.1g;
un amortissement du signal dans le cas linéaire équivalent pour Amax >0.1g.
0 0.1 0.2 0.3Acc l ration (g)
40
20
0
50
30
10
Prof
onde
ur (m
)
Lin aire quivalent
0 0.1 0.2 0.3Acc l ration (g)
40
20
0
50
30
10
Pro
fond
eur (
m)
0.05g0.1g0.2g0.3g
Non lin aire
Figure 4.18: Distribution de l'accélération en profondeur à la station SRPT1.
69
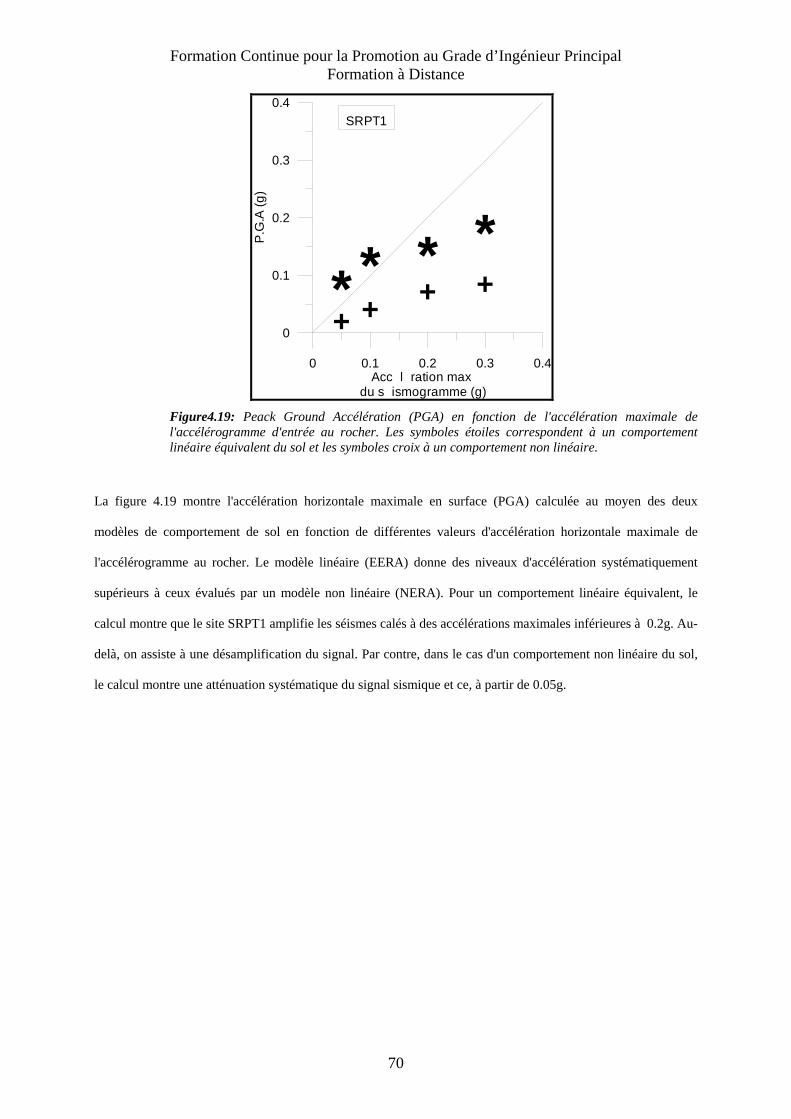
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
0 0.1 0.2 0.3 0.4Acc l ration max
du s ismogramme (g)
0
0.1
0.2
0.3
0.4
P.G
.A (g
)
* * * *+ + + +
SRPT1
Figure4.19: Peack Ground Accélération (PGA) en fonction de l'accélération maximale de l'accélérogramme d'entrée au rocher. Les symboles étoiles correspondent à un comportement linéaire équivalent du sol et les symboles croix à un comportement non linéaire.
La figure 4.19 montre l'accélération horizontale maximale en surface (PGA) calculée au moyen des deux
modèles de comportement de sol en fonction de différentes valeurs d'accélération horizontale maximale de
l'accélérogramme au rocher. Le modèle linéaire (EERA) donne des niveaux d'accélération systématiquement
supérieurs à ceux évalués par un modèle non linéaire (NERA). Pour un comportement linéaire équivalent, le
calcul montre que le site SRPT1 amplifie les séismes calés à des accélérations maximales inférieures à 0.2g. Au-
delà, on assiste à une désamplification du signal. Par contre, dans le cas d'un comportement non linéaire du sol,
le calcul montre une atténuation systématique du signal sismique et ce, à partir de 0.05g.
70
Formation Continue pour la Promotion au Grade d’Ingénieur Principal Formation à Distance
Chapitre V. Perte de capacité portante et Liquéfaction.
71