形函数构造及线性单元kczxsp.hnu.edu.cn › upload › 20170308151918882.pdf ·...
TRANSCRIPT

机械与运载工程学院湖南大学
College of Mechanical & Vehicle Engineering
Hunan University
崔向阳
形函数构造及线性单元
第7讲:

有限单元法 崔向阳 2
形函数概述
在有限元中,形函数不仅用作单元的内插函数,把单元内任一点的位移用
节点表示,还是求解刚度矩阵和节点力向量关键。在上一讲中,我们只讲
了如何构造有限元方程,并没有涉及到形函数的构造。这节课我们将针对
如何构造形函数展开讲解,并基于三角形单元讲解线性单元的构造方式和
形函数的性质,并针对具体问题进行求解。
什么是形函数?
形函数代表一种单元上近似解的插值关系,在数
学上它反应了由节点的场量对单元内任意一点场
量的插值,也叫做插值函数。它决定了近似解在
单元上分布的形状,所以称它为形函数(shape
function)。

有限单元法 崔向阳 3
形函数构造
单元形函数主要取决于单元的形状、节点场变量类型和单元的节点数目。根
据形函数的思想,首先给出单元的位移模式,然后利用节点条件将位移模式
的待定参数表示成场函数的节点值和单元几何参数的函数,从而将场函数表
示成节点值插值形式的表达式。
位移模式也叫位移函数,是单元内部位移变化的数学表达式,是坐标的函数。
有限元分析必须事先给出(设定)位移函数。一般而论,位移函数选取会影
响甚至严重影响计算结果的精度。弹性力学中,恰当选取位移函数不是一件
容易的事情。有限单元法中当单元划分得足够小时,把位移函数设定为简单
的多项式也可得到相当精确的结果。这正是有限单元法具有的重要优势之一。
位移模式

有限单元法 崔向阳 4
形函数分类在有限元中,节点场变量的类型可以是只包含场函数的节点值,也可能还包
含场函数导数的节点值。是否需要场函数导数的节点值作为节点变量一般取
决于单元边界上的连续性要求:
如果边界上只要求场函数值保持连续,构造形函数
所需的节点场变量只包含场函数的节点值,这种形
函数称之为Lagrange型形函数,所构造的单元称之
为C0型单元(Lagrange型);
如果要求函数值及其一阶导数值都保持连续,构造
形函数所需的节点场变量同时包含场函数的节点值
和场函数导数的节点值,这种形函数称之为Hermite
型形函数,所构造的单元称之为C1型单元(Hermite
型)。

有限单元法 崔向阳 5
形函数构造的一般方式
根据单元形状、节点数目和节点场变量类型确定位移模式
引入节点条件计算位移模式中的待定系数
将所求待定系数代入位移模式,合并简化得到单元场变量与节点场量值之间的关系,进而得到形函数
.......2
321 xaxaau
.......2' 32 xaau
.......2
321 III xaxaau
.......2' 32 II xaau
.......' 2211'11 uuuu uuu
形函数为: .......21'1 、、、 uuu
.......2211 uuu
形函数为: .......21 、、
有限单元法 崔向阳 6
常用形函数构造
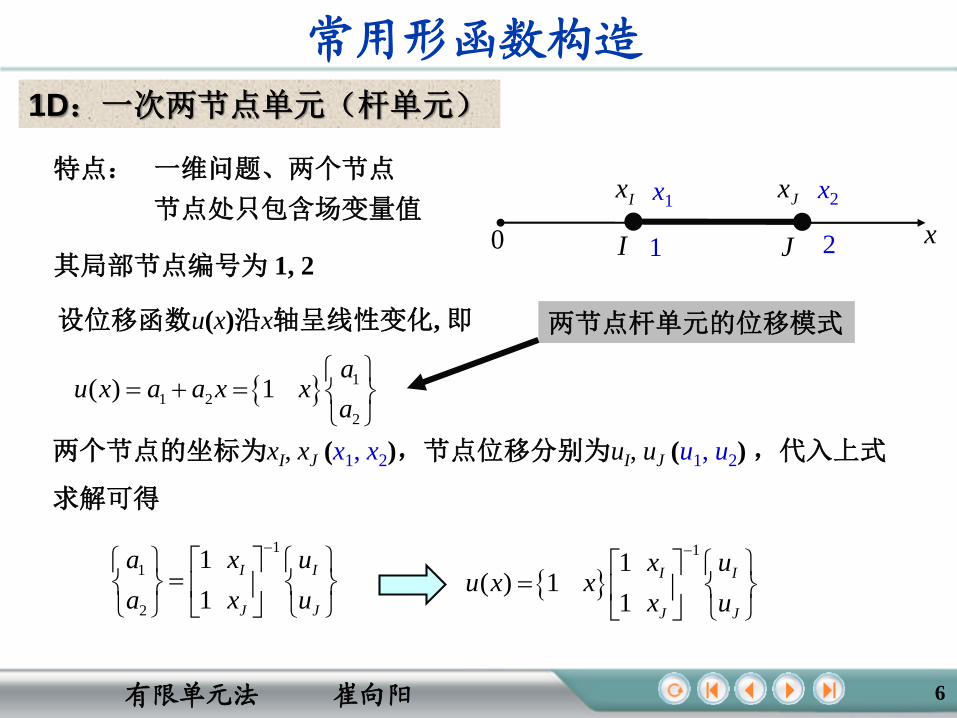
1D:一次两节点单元(杆单元)
x0
Ix Jx
I J
x1x2
1 2
特点: 一维问题、两个节点
节点处只包含场变量值
其局部节点编号为 1, 2
设位移函数u(x)沿x轴呈线性变化, 即
1
1 2
2
( ) 1a
u x a a x xa
两节点杆单元的位移模式
1
1
2
1
1
I I
J J
x ua
x ua
两个节点的坐标为xI, xJ (x1, x2),节点位移分别为uI, uJ (u1, u2) ,代入上式
求解可得
1
1( ) 1
1
I I
J J
x uu x x
x u

有限单元法 崔向阳 7
常用形函数构造
1D:一次两节点单元(杆单元)
形函数为:
1 1
1
2
2 1
2
1 2
1 2
1 2 1
1 1= 1 = 1
1 1
= , = =
I
J
J I
J I J I
x
x
xx x
x
x x x x x x
x
x x
x x xx x x x
φ
位移函数可表示为:
1
2
1 2 1 2
I
J
uu x
u
uu
x0
u
1( )Iu u
1( )Ix x2( )Jx x
2( )Ju u
1:1
1( )Ix x 2( )Jx x
1:2
1( )Ix x 2( )Jx x形函数φ1和φ2在单元内是x
的线性函数,且满足:
1
1 1 2
2
1
2 2
=1 =0
=0 =1
x x
x x

有限单元法 崔向阳 8
常用形函数构造
1D:一次两节点单元(杆单元)
借助于Matlab软件,可以很方便的推导出上述单元形函数,具体代码
如下:
clear
x1=sym('x1');
x2=sym('x2');
x=sym('x');
v=[1 x];
1
2
11
11
xx
x
φ
m=[1,x1;1,x2];
mm=inv(m);
N=v*mm;
simplify(factor(N)) simplify:简化函数
factor:因式分解
此处用了matlab中的库函数:
inv:矩阵求逆

有限单元法 崔向阳 9
常用形函数构造
1D:二次三节点单元(高次杆单元)
特点: 一维问题、三个节点
节点处只包含场变量值
其局部节点编号为 1, 2, 3
设位移函数u(x)沿x轴呈二次变化, 即
1
2 2
1 2 3 2
3
( ) 1
a
u x a a x a x x x a
a
三节点杆单元的位移模式
12
1
2
2
2
3
1
1
1
I I I
J J J
K K K
a x x u
a x x u
a x x u
根据节点位移条件求解可得
12
2 2
2
1
( ) 1 1
1
I I I
J J J
K K K
x x u
u x x x x x u
x x u
x0
1( )Ix x 2( )Jx x3( )Kx x
( )1I ( )2J( )3K

有限单元法 崔向阳 10
常用形函数构造
形函数为:
1 12 2
2 2 2 2
1 2 3
2
1 1
2 2
3 3
2
1 1
= 1 1 = 1 1
1 1
I I
J J
K K
x x
x x
x x
x x
x x x x x x
x x
φ
1D:二次三节点单元(高次杆单元)
2
1
3
1 2 1 3
=J K
I J I K
x x
x x x x
x x x x x x
x x x x
1
2
3
2 1 2 3
=I K
J I J K
x x
x x x x
x x x x x x
x x x x
2
3
1
3 2 3 1
=J I
K J K I
x x
x x x x
x x x x x x
x x x x
1
1( )Ix x 2( )Jx x3( )Kx x
1
1( )Ix x2( )Jx x3( )Kx x
1
1( )Ix x2( )Jx x
3( )Kx x

有限单元法 崔向阳 11
常用形函数构造
1D:二次三节点单元(高次杆单元)
位移函数可表示为:
1 2 3
1 2 2
3
3
1
I
J
K
u
u
u u
u
u
u
x
形函数φ1、φ2和φ3在单元内是x的二次函数,且满足:
1 2 3
1 2
1 1 1
3
1
2 2 2
3 3 32 3
=1 =0 =0
=0 =1 =0
=0 =0 =1
x x x
x x x
x x x
x0
u
1( )Iu u
1( )Ix x 2( )Jx x
2( )Ju u
3( )Ku u
3( )Kx x
有限单元法 崔向阳 12
常用形函数构造
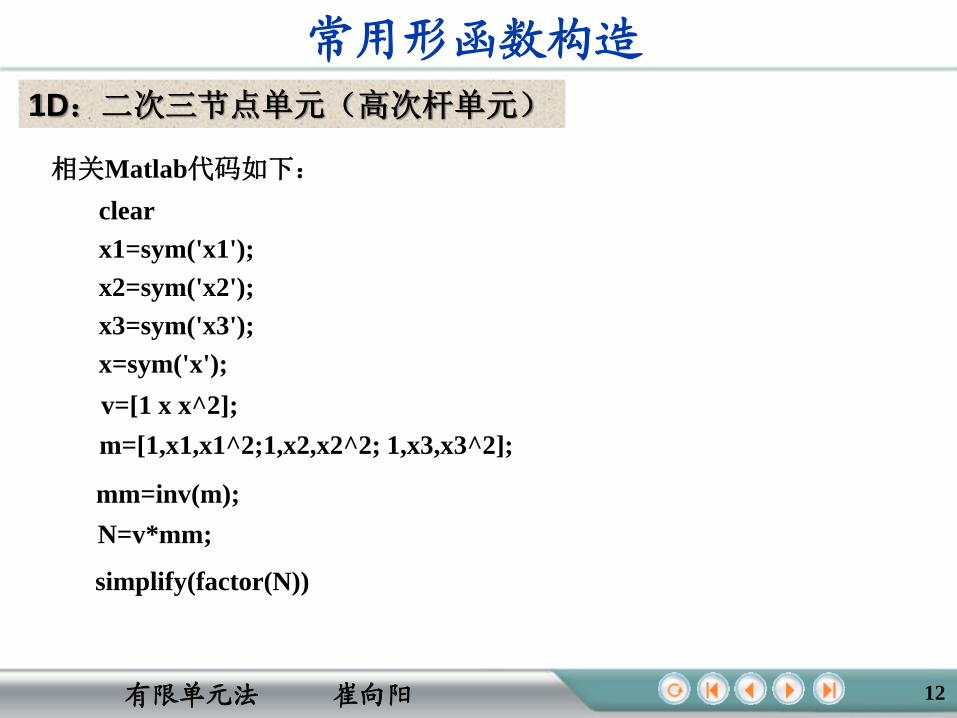
相关Matlab代码如下:
clear
x1=sym('x1');
x2=sym('x2');
x3=sym('x3');
x=sym('x');
v=[1 x x^2];
m=[1,x1,x1^2;1,x2,x2^2; 1,x3,x3^2];
mm=inv(m);
N=v*mm;
simplify(factor(N))
1D:二次三节点单元(高次杆单元)

有限单元法 崔向阳 13
常用形函数构造
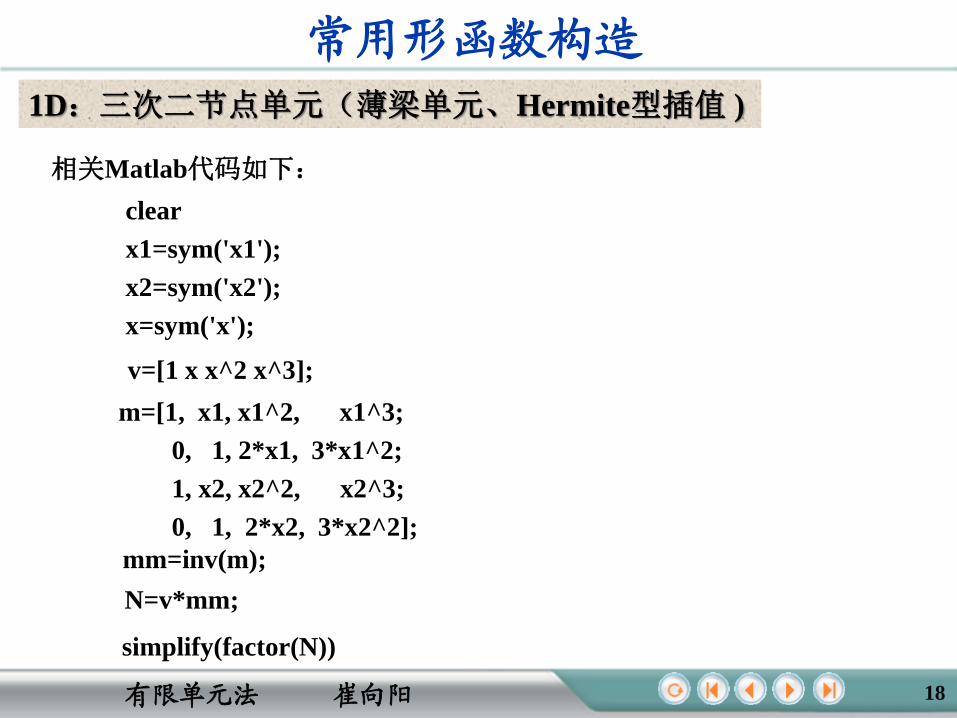
1D:三次二节点单元(薄梁单元、Hermite型插值 )
特点: 一维问题、两个节点
节点处包含场变量值和场变量的导数值
其局部节点编号为 1、2,每个节点包
含两个自由度(场函数u及其导数u′的
节点值);这类单元的位移函数为:
1
22 3
3
4
( ) 1
a
au x x x x
a
a
两节点梁单元的位移模式
x0
1( )Ix x 2( )Jx x
( )1I ( )2J
1
22
3
4
'( ) 0 1 2 3
a
au x x x
a
a

有限单元法 崔向阳 14
常用形函数构造
1D:三次二节点单元(薄梁单元、Hermite型插值 )
根据节点位移条件可得
12 3 2 3
1 1
2 2
2 2
2 3 2 33 3
2 24 4
1 1
' 0 1 2 3 0 1 2 3 '
1 1
' '0 1 2 3 0 1 2 3
I I I I I II I
I I I I I I
J JJ J J J J J
J JJ J J J
x x x x x xu ua a
u x x x x ua a
u ua ax x x x x x
u ua ax x x x
12 3
2
2 3
2 3
2
1
0 1 2 3 '( ) 1
1
'0 1 2 3
I I I I
I I I
JJ J J
JJ J
x x x u
x x uu x x x x
ux x x
ux x

有限单元法 崔向阳 15
常用形函数构造
形函数为:
12 3
2
2 3
1 '1 2 '2 2 3
2
12 3
2
2 3
2 3
2
1 1 1
1 1
2 2 2
2 2
1
0 1 2 3= 1
1
0 1 2 3
1
0 1 2 3= 1
1
0 1 2 3
I I I
I I
u u u u
J J J
J J
x
x x x
x x
x x
x x
x xx x x
x x x
x x
x x
xx
x x
φ
1D:三次二节点单元(薄梁单元、Hermite型插值 )

有限单元法 崔向阳 16
常用形函数构造
22 1
1 2
2
1 3
2 3u
x x xx x
x x
1D:三次二节点单元(薄梁单元、Hermite型插值 )
21
1 2
2
2
1
u
x x xx
x x
’
11 2
1
2
2
2 3
2 3u
xx xx
x x
x
21
1 2
2
2 2u
x x xx
x x
’
1( )Ix x 2( )Jx x
1
1( )Ix x 2( )Jx x
1rad
1( )Ix x 2( )Jx x
1
1( )Ix x 2( )Jx x
1rad

有限单元法 崔向阳 17
常用形函数构造
形函数φu1、φ u′1、φ u2和φ u′2在单元内是x的三次函数,且满足:
1 1 1 1
'1 '1 '1 '1
2 2 2 2
'2 '2 '2
1 2 1 2
1 2 1 2
1 2 1 2
1 2 '1 2 2
=1 =0 ' =0 ' =0
=0 =0 ' =1 ' =0
=0 =1 ' =0 ' =0
=0 =0 ' =0 ' =1
u u u u
u u u u
u u u u
u u u u
x x x x
x x x x
x x x x
x x x x
1D:三次二节点单元(薄梁单元、Hermite型插值 )
位移函数可表示为:
1 '1
1
1
2
2
2 '2 1 '1 2 '2
' '=
' '
I
I
u u u u u u u u
J
J
u
u
u
uu
uu
u
x
u
有限单元法 崔向阳 18
常用形函数构造
相关Matlab代码如下:
clear
x1=sym('x1');
x2=sym('x2');
x=sym('x');
v=[1 x x^2 x^3];
mm=inv(m);
N=v*mm;
simplify(factor(N))
1D:三次二节点单元(薄梁单元、Hermite型插值 )
m=[1, x1, x1^2, x1^3;
0, 1, 2*x1, 3*x1^2;
1, x2, x2^2, x2^3;
0, 1, 2*x2, 3*x2^2];

有限单元法 崔向阳 19
常用形函数构造
特点: 二维问题、三个节点
节点处只包含场变量值
其局部节点编号为 1, 2, 3
设位移函数ui(x, y)为:
1
1 2 3 2
3
( ) 1 1,2i
a
u x a a x a y x y a i
a
三节点三角形单元的
位移模式根据节点位移条件求解可得
0 x
y
1 1,, ( )I I x yx y
( )1I
( )2J
( )3K
2 2,, ( )J J x yx y
3 3,, ( )K K x yx y
1
1
2
3
1
1
1
I I iI
J J iJ
K K iK
a x y u
a x y u
a x y u
11
( ) 1 1
1
I I iI
i J J iJ
K K iK
x y u
u x x y x y u
x y u
2D: 三节点三角形单元(平面三角形单元)

有限单元法 崔向阳 20
常用形函数构造
形函数为:
1 1
1 1
1 2 3 2 2
3 3
1 1
= 1 1 = 1 1
1 1
I I
J J
K K
x y
x y x y x y
x y
x y
x y
x y
φ
2 3 3 2 2 3 3 21
1( ) ( )
2x y
Ax y x y y y x x
0 x
yu
1 1,, ( )I I x yx y
( )1I( )2J
( )3K
2 2,, ( )J J x yx y
3 3,, ( )K K x yx y
3 1 1 3 3 1 1 32
1( ) ( )
2x y
Ax y x y y y x x
1 2 2 1 1 2 2 13
1( ) ( )
2x y
Ax y x y y y x x
1 1
2 2
3 3
11
12
1
x y
yA x
x y
其中A是三角形的面积
2D: 三节点三角形单元(平面三角形单元)

有限单元法 崔向阳 21
常用形函数构造
形函数φ1、φ2和φ3在单元内是坐标(x, y)的线性函数,且满足:
1 1 2 21 1 1
2 2 2
3
3
3
3
1 1 2 2 3 3
1 1 2 32 3 3
, , ,
, , ,
, ,
=1 =0 =0
=0 =1 =0
=0 =0 =1,
x y x y x y
x y x y x y
x y x y x y
位移函数可表示为:
1 2 3 1 2 3
1
2
3
, = 1,2
iI
i i
i
iK
i
i
J
u
u x y u iu
u
u
u
2D: 三节点三角形单元(平面三角形单元)
1 2 3
1 2
1
23
1
2
3
3
0 0 0
0 0 0
u
v
u
v
u
v
u
v
展开后得:

有限单元法 崔向阳 22
常用形函数构造
相关Matlab代码如下:
clear
v=sym('[1, x, y] ');
mm=inv(m);
N=v*mm;
simplify(factor(N))
m=sym(' [1, x1, y1;
1, x2, y2;
1, x3, y3] ');
2D: 三节点三角形单元(平面三角形单元)

有限单元法 崔向阳 23
常用形函数构造
2D: 四节点四边形单元
特点: 二维问题、四个节点
节点处只包含场变量值
其局部节点编号为 1, 2, 3, 4
设位移函数ui(x, y)为:
1
2
1 2 3
3
4
( ) 1 1,2i
a
au x a a x a y x y xy i
a
a
四节点四边形形单元的位移模式
根据节点位移条件求解可得
x
y
1 1( , )x y
12
3
2 2( , )x y
3 3,x y
4
4 4,x y
11 1 1 1
22 2 2 2
33 3 3 3
44
1
1
2
4 4
3
4
1
1
1
1
i
i
i
i
ux y x y
ux y x y
ux y x
a
ay
ux y x ya
11 1 1 1
22 2 2 2
33 3 3 3
44 4
1
4 4
1
1( ) 1
1
1
i
i
i
i
i
ux y x y
ux y x y
ux y x y
ux y x
u x x y
y
xy

有限单元法 崔向阳 24
常用形函数构造
形函数为:
1 1 1 1
2 2 2 2
1
1 2
3 3 3 3
4 4
3 4
4 4
1
1= 1
1
1
x y x y
x y x y
x yx y
x y
x
y
x
x
y y
φ
位移函数可表示为:
1
2
3
1 2
4
3 4, = 1,2
i
i
i
i
i
u
u
u
u
u x y i
2D: 四节点四边形单元

有限单元法 崔向阳 25
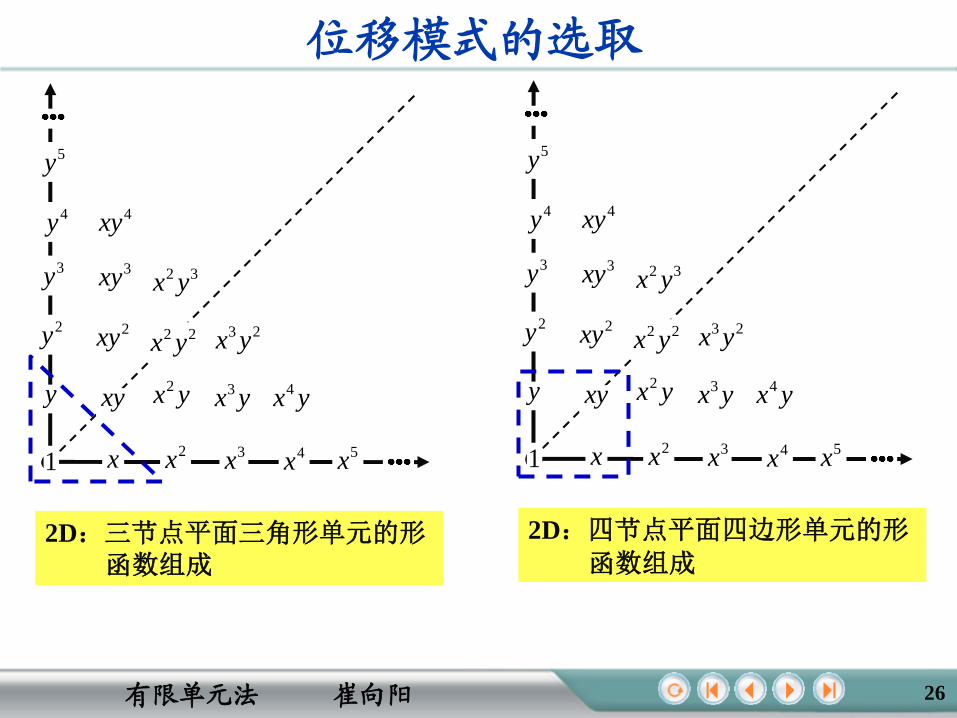
位移模式的选取
由前面形函数的构造可以看出,位移模式(位移函数)的选取直接决定着
形函数的构造。针对给定的单元,我们可以根据节点条件基于帕斯卡三角
形选取位移模式,以下是几种典型情况。例如:
1D:一次二节点单元的形函数组成
1 x 2x3x 4x
1D:二次三节点单元的形函数组成
1 x 2x3x 4x
1D: 三次二节点单元的形函数组成
1 x 2x3x 4x
选取规律:
由单元的节点条件数目确定待定系数数目
由待定系数数目确定选择位移模式的项数
有限单元法 崔向阳 26
位移模式的选取
2D:三节点平面三角形单元的形函数组成
x 2x 3x 4x1
y
2y
3y
4y
xy2x y 3x y 4x y
2xy 2 2x y3 2x y
3xy 2 3x y
5x
5y
4xy
2D:四节点平面四边形单元的形
函数组成
x 2x 3x 4x1
y
2y
3y
4y
xy2x y 3x y 4x y
2xy 2 2x y3 2x y
3xy 2 3x y
5x
5y
4xy

有限单元法 崔向阳 27
位移模式的选取
2D:8节点高次平面单元的形函数组成
x 2x 3x 4x1
y
2y
3y
4y
xy2x y 3x y 4x y
2xy 2 2x y3 2x y
3xy 2 3x y
5x
5y
4xy
2D: 9节点高次平面单元的形函
数组成
x 2x 3x 4x1
y
2y
3y
4y
xy2x y 3x y 4x y
2xy2 2x y 3 2x y
3xy 2 3x y
5x
5y
4xy

有限单元法 崔向阳 28
位移模式的选取
xyz
xy2x
2x y2xy
1
z
y
2y
2z
x
xz yz
3x
3y
3z
2xz
2x z2yz
2y zxyz
xy2x
2x y2xy
1
z
y
2y
2z
x
xz yz
3x
3y
3z
2xz
2x z2yz
2y z
3D:4节点四面体单元的形函数组成
3D:10节点四面体单元的形函数组成

有限单元法 崔向阳
1 2
29
单纯形元的形函数构造
单纯形是代数拓扑中最基本的概念。单纯形是三角形和四面体的一种泛化,
一个k维单纯形是指包含 k+1个节点的凸多面体。
显然:2节点一维线性单元、 3节点三角形单元、4节点四面体单元都属于单
纯形元。
对于单纯形元,我们可以通过引入面积坐标的概念,十分方便的构造出这类
单元的形函数。
什么是面积坐标?
P1l2l
1 1 /L l l令 2 2 /L l l
l
L1和L2就称之为P点的面积坐标。
PA
1
2
3
1A2A
3A
1 1 /L A A
令
3 3 /L A A
2 2 /L A A
L1、L2和L3就称之为P
点的面积坐标。

有限单元法 崔向阳 30
单纯形元的形函数构造
L1、L2、L3和L4就称之为P点的面积坐标。
V
1
2
3
4
P1V2V
3V
4V
1 1 /L V V
令
3 3 /L V V
2 2 /L V V
4 4 /L V V
对于单纯形元,任意点P对应于某节点的面积坐标就是点P 对应于该节点的
形函数,即
I IL

有限单元法 崔向阳 31
形函数的性质形函数用来表示单元任意一点场量与节点场量值之间的关系,构造出的形
函数需要满足一些基本性质要求,下面我们一以平面三角形单元为例讨论
有限元形函数的一些性质。
由前面可知,三角形单元的形函数为
2 3 3 2 2 3 3 21
1( ) ( )
2x y
Ax y x y y y x x
3 1 1 3 3 1 1 32
1( ) ( )
2x y
Ax y x y y y x x
1 2 2 1 1 2 2 13
1( ) ( )
2x y
Ax y x y y y x x
1 1
2 2
3 3
11
12
1
x y
yA x
x y
1
2I I I Ia b x c y
A
写成统一格式可表示为
( )1I
( )2J
( )3K

有限单元法 崔向阳 32
形函数的性质
1
2I I I Ia b x c y
A
J J
I J K K J
K K
x ya x y x y
x y
1
1
J
I J K
K
yb y y
y
1
1
J
I K J
K
xc x x
x
式中
( )1I
( )2J
( )3K
I
JK
I= 1, 2, 3
J = 2, 3, 1K= 3, 1, 2
此处I, J, K具有一种轮转关系

有限单元法 崔向阳
φ1 =1
1
2
3
φ2 =1
1
2
3φ3 =11
2
3
形函数的性质
33
性质1:形函数在各单元节点上的值,具有“本点是1、它点为零”的性质
(Delta性质),即满足:
1 1 1 11 2 3
1 2 3
1
1
2
1
2 2 2 2 2 2
3 3 3 33 3 3
, , ,
, , ,
, ,
=1 =0 =0
=0 =1 =0
=0 =0 =1,
x y x y x y
x y x y x y
x y x y x y

有限单元法 崔向阳
形函数的性质性质2:在单元任一点上,形函数在各单元节点上的值之和等于1(单位分解
性),即满足:
1. 三个形函数只有两个是独立的
2. 当三角形单元的三个结点的位移相等*
i j mu u u u
* *( , ) ( )i i j j m m i j mu x y N u N u N u N N N u u
1 2 3
1 2 3 1 2 3 1 2 3
( , ) ( , ) ( , )
1( ) ( ) ( )
2
x y x y x y
a a a b b b x c c c yA
第一列与它的代数余子式乘
积之和
第一列与第二列的代数余子式乘积之和
第一列与第三列的代数余子式乘积之和
2A 0 0
34
1

有限单元法 崔向阳
形函数的性质
35
性质3:单元任意一条边上的形函数,仅与该条边上的节点坐标有关、而与其它
节点坐标无关,即满足:
11
2 1
12
2 1
3
( , ) 1
( , )
( , ) 0
x xx y
x x
x xx y
x x
x y
1 1( , )x y12
3
2 2( , )x y
3 3( , )x y1( , )x y
3( , )x y
2 ( , )x y
在1-2 边上有:
根据形函数的这一性质可以证明,相邻单元的位移分
别进行线性插值之后,在其公共边上将是连续的。例
如,单元1-2-3和1-2-4具有公共边1-2。由上式可知,
在1-2边上两个单元的第三个形函数都等于0,在公共
边上的位移u、v 将完全由公共边上的两个节点1、2的
位移所确定,因而相邻单元的位移是保持连续 。
1
2
3
4

有限单元法 崔向阳 36
对于一个数值计算方法,一般总希望随着网格的逐步细分所得到的解答能够
收敛于问题的精确解。根据前面的分析,在有限元中,一旦确定了单元的形
状,位移模式的选择将是非常关键的。由于载荷的移置、应力矩阵和刚度矩
阵的建立都依赖于单元的位移模式,所以,如果所选择的位移模式与真实的
位移分布有很大的差别,会将很难获得良好的数值解。
可以证明,对于一个给定的位移模式,其
刚度系数的数值比精确值要大。所以,在
给定的载荷之下,有限元计算模型的变形
将比实际结构的变形小。因此细分单元网
格,位移近似解将由下方收敛于精确解,
即得到真实解的下界。
位移模式与有限元收敛准则

有限单元法 崔向阳
位移模式与有限元收敛准则
37
为了保证解答的收敛性,位移模式要满足以下三个条件:
⑴ 位移模式必须包含单元的刚体位移。也就是,当节点位移由某个刚体位移
引起时,弹性体内将不会产生应变。所以,位移模式不但要具有描述单元本
身形变的能力,而且还要具有描述由于其它单元形变而通过节点位移引起单
元刚体位移的能力。例如,平面三角形单元位移模式的常数项a1就是用于提
供刚体位移的。
⑵ 位移模式必须能包含单元的常应变。每个单元的应变一般包含两个部分:
一部分是与该单元中各点的坐标位置有关的应变,另一部分是与位置坐标无
关的应变(即所谓的常应变)。从物理意义上看,当单元尺寸无限缩小时,
每个单元中的应变应趋于常量。因此,在位移模式中必须包否则就不可能使
数值收敛于正确解。例如,平面三角形单元位移模式的常数项a1和a2就是用
于提供刚体位移的。

有限单元法 崔向阳
位移模式与有限元收敛准则
38
⑶ 位移模式在单元内要连续、且在相邻单元之间的位移必须协调。当选择多
项式来构成位移模式时,单元内的连续性要求总是得到满足的,单元间的位
移协调性,就是要求单元之间既不会出现开裂也不会出现重叠的现象。通常,
当单元交界面上的位移取决于该交界面上节点的位移时,就可以保证位移的
协调性。
在有限单元法中,把能够满足条件1和2的单元,称为完备单元;满足条件3的
单元,叫做协调单元。条件1和2通常较容易满足;在某些梁、板及壳体分析
中,要使单元满足条件3会比较困难,实践中有时也出现一些只满足条件1和2
的单元,其收敛性往往也能够令人满意。放松条件3的单元,即完备而不协调
的单元。不协调单元的缺点主要是不能事先确定其刚度与真实刚度之间的大
小关系。但不协调单元一般不像协调单元那样刚硬(即比较柔软),因此有
可能会比协调单元收敛得快。

有限单元法 崔向阳
位移模式与有限元收敛准则
39
在选择多项式作为单元的位移模式时,其阶次的确定要考虑解答的收敛性,
即单元的完备性和协调性要求。实践证明,虽然这两项确实是所要考虑的重
要因素,但并不是唯一的因素。选择多项式位移模式阶次时,需要考虑的另
一个因素是,所选的模式应该与局部坐标系的方位无关,这一性质称为几何
各向同性。对于线性多项式,各向同性的要求通常就等价于位移模式必须包
含常应变状态。对于高次位移模式,就是不应该有一个偏移的坐标方向,也
就是位移形式不应该随局部坐标的更换而改变。经验证明,实现几何各向同
性的一种有效方法是,可以根据帕斯卡三角形来选择二维多项式的各项。在
二维多项式中,如果包含有对称轴一边的某一项,就必须同时包含有另一边
的对称项。

有限单元法 崔向阳
平面三角形单元构造
40
三角形内任意一点的位移可表示为:
1
2I I I Ia b x c y
A
x, u
y, v
1 (x1, y1)
(u1, v1)
2 (x2, y2)
(u2, v2)
3 (x3, y3)
(u3, v3)
A
fsx fsy
1
1
2
2
3
3
e
u
v
u
v
u
v
d
节点1的位移
节点2的位移
节点3的位移
由前面可知,φ为三角形单元的形函数
1 1 2 2 3 3,v x y v v v
1 1 2 2 3 3,u x y u u u
( , ) ( , ) ex y x yu φ d
1 2 3
1 2 3
0 0 0
0 0 0
φ

有限单元法 崔向阳
平面三角形单元构造
41
1
1
1 2 3 2
21 2 3
0 0
0 0 00 0
0 0 0
x
y
xy
u
vx x
uu
vvy y
y x y x
ε
3
3
e
u
v
Bd
单元内的应变可表示为:
31 2
31 2
1 1 2 2 3 3
0 0 0
0 0 0
xx x
y y y
y x y x y x
B
应变矩阵为:
1
2I I I Ia b x c y
A
有限单元法 崔向阳
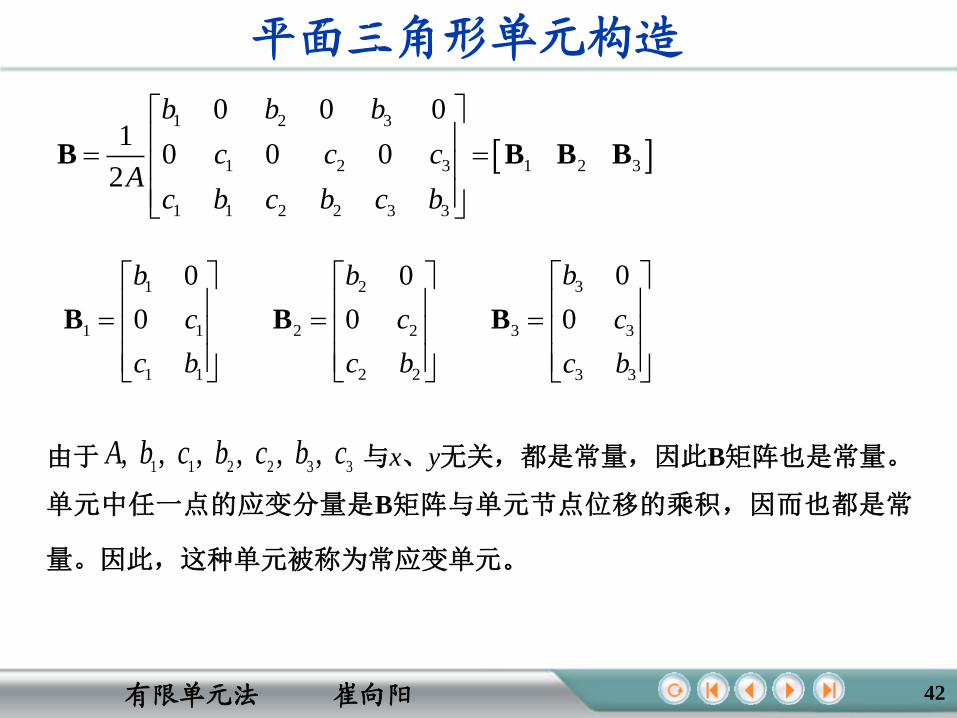
1 2 3
1 2 3 1 2 3
1 1 2 2 3 3
0 0 01
0 0 0 2
b b b
c c cA
c b c b c b
B B B B
31 2
1 1 2 2 3 3
1 1 2 2 3 3
0 0 0
0 0 0
bb b
c c c
c b c b c b
B B B
由于 与x、y无关,都是常量,因此B矩阵也是常量。
单元中任一点的应变分量是B矩阵与单元节点位移的乘积,因而也都是常
量。因此,这种单元被称为常应变单元。
332211,,,,,, cbcbcbA
42
平面三角形单元构造

有限单元法 崔向阳
e σ Dε DBd
单元应力:
43
平面三角形单元构造
由于同一单元中的D、B矩阵都是常数矩阵,所以单元内的应力不随坐标
变化而变化。也就是说,三角形三节点单元内的应力分量是常量。
当然,相邻单元的E, , A, bI及cI一般不完全相同,因而具有不同的应力,
这就造成在相邻单元的公共边上存在着应力突变现象。但是随着网格的细
分,这种突变将会迅速减小。

有限单元法 崔向阳 44
平面三角形单元构造
T Tde
e eA
K B DB B DB
三角形单元的刚度矩阵为:
对于整个问题域,系统刚度矩阵可由单元刚度矩阵集成得到
elem
1
Ne
e
K K
elem
1
Ne
e
f f
Kd f欲求解系统平衡方程
我们还需要求解载荷向量
T Td de e
q
e
f φ b φ p
接下来我们基于三角形单元讲述如何求解单元载荷向量。

有限单元法 崔向阳 45
单元载荷向量
在结构有限元整体分析时,结构的载荷向量f是由结构的全部单元的单元载
荷向量集成而成,而单元载荷向量fe 则是由作用在单元上的集中力、表面
力和体积力分别等效到节点上,再逐点加以合成求得。
单元载荷向量在集成过程中相互联接的单元之间存在大小相等方向相反的作
用力和反作用力,它们之间相互抵消,因此,结构载荷列阵中只有与外载荷
有关的节点有值。
I
J
K
x
yqV
·I
J
K
x
yqs
·I
J
K
x
y fc

有限单元法 崔向阳
有限元计算过程框图
剖分结构为有限个单元,对节点、单元编号
构建单元刚度矩阵和单元等价节点力向量
组装系统刚度矩阵并引入约束
组装整体等价节点荷载向量
从节点平衡方程解未知节点位移
计算结构应变、应力
46

有限单元法 崔向阳
(0,0)A
(0, 2)B
(4,0)D
(4, 1)C
1F
考虑一个平面应力问题如图所示,假设厚度h=1,材料为各项同性,杨氏模量为E=1,泊松比为ν=0,相关力和位移边界条件如图中所示,问题左端为固定约束。试用两个三角形单元分析此问题,三角形单元的网格划分如图所示。试求问题各节点位移u、v和应力σx,σy和σxy。
1
2
4
3 1
2
例题
47

有限单元法 崔向阳09:51
1
2
4
3 1
2
1 2 3 2 3 3 1 1 2
1 2 3 3 2 1 3 2 1
1 1 2 2 3 3 3 2 2 3 1 3 3 1 2 1 1 2
0 0 0 0 0 01
0 0 0 0 0 02 e
b b b y y y y y y
c c c x x x x x xA
c b c b c b x x y y x x y y x x y y
B
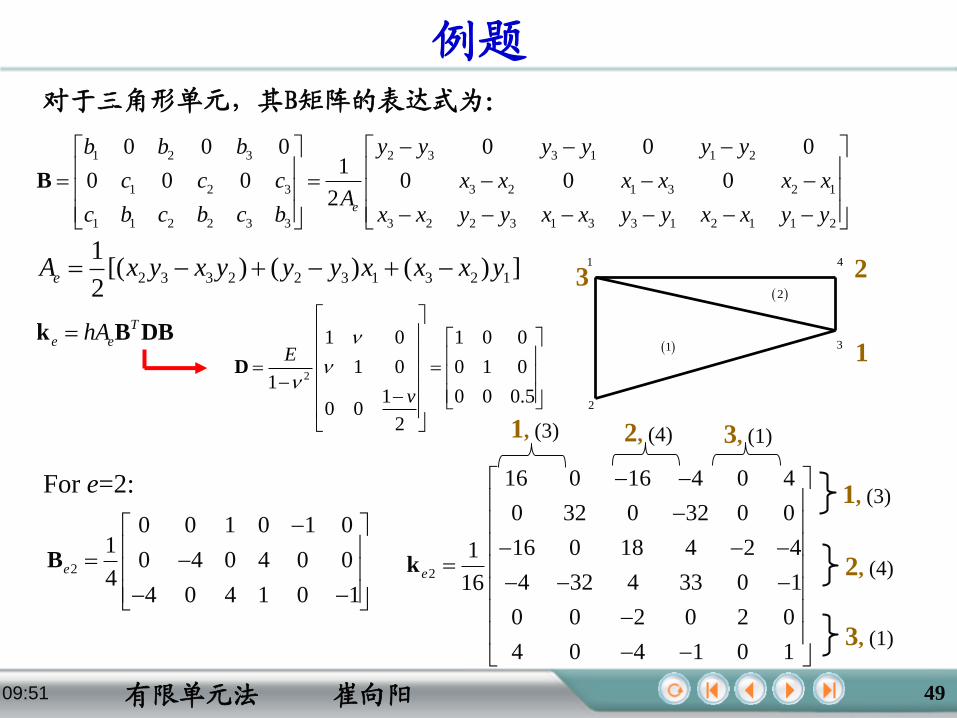
对于三角形单元,其B矩阵的表达式为:
2 3 3 2 2 3 1 3 2 1
1[( ) ( ) ( ) ]
2eA x y x y y y x x x y
1
2
3
T
e ehAk B DB
2
1 0 1 0 0
1 0 0 1 01
1 0 0 0.50 0
2
E
v
D
For e=1:
1
9 2 2 4 7 2
2 16.5 0 1 2 15.5
2 0 4 0 2 01
4 1 0 2 4 116
7 2 2 4 9 2
2 15.5 0 1 2 16.5
e
k1
1 0 2 0 1 01
0 4 0 0 0 48
4 1 0 2 4 1
e
B
1, (2)
3, (1)
2, (3)
1, (2) 2, (3) 3, (1)
例题
48
有限单元法 崔向阳09:51
1
2
4
3 1
2
1 2 3 2 3 3 1 1 2
1 2 3 3 2 1 3 2 1
1 1 2 2 3 3 3 2 2 3 1 3 3 1 2 1 1 2
0 0 0 0 0 01
0 0 0 0 0 02 e
b b b y y y y y y
c c c x x x x x xA
c b c b c b x x y y x x y y x x y y
B
2 3 3 2 2 3 1 3 2 1
1[( ) ( ) ( ) ]
2eA x y x y y y x x x y
1
23
T
e ehAk B DB
2
1 0 1 0 0
1 0 0 1 01
1 0 0 0.50 0
2
E
v
D
For e=2:
2
16 0 16 4 0 4
0 32 0 32 0 0
16 0 18 4 2 41
4 32 4 33 0 116
0 0 2 0 2 0
4 0 4 1 0 1
e
k2
0 0 1 0 1 01
0 4 0 4 0 04
4 0 4 1 0 1
e
B
1, (3)
3, (1)
2, (4)
1, (3) 2, (4) 3, (1)
对于三角形单元,其B矩阵的表达式为:
例题
49

有限单元法 崔向阳
组装刚度矩阵
1 2
11 2 7 2 2 4 2 4
2 17.5 2 15.5 4 1 0 1
7 2 9 2 2 4 0 0
2 15.5 2 16.5 0 1 0 01
2 4 2 0 20 0 16 416
4 1 4 1 0 34 0 32
2 0 0 0 16 0 18 4
4 1 0 0 4 32 4 33
e e
K = k + k
1, (2)3+3, (1)
2+1, (3)
2, (4)
3+3, (1)
1, (2)
2+1, (3) 2, (4)
1
2
4
3 1
2
例题
50

有限单元法 崔向阳
载荷向量1
2
4
3 1
2
1
23
1
2
3
F=1
2
0
0
0
1
0
0
e
f1
0
0
0
0
0
0
e
f
1, (2)
3, (1)
2, (3)
1, (3)
3, (1)
2, (4)
1 2
0
0
0
0
0
0
0
1
e e
f f f
2+1, (3)
2, (4)
3+3, (1)
1, (2)
例题
51

有限单元法 崔向阳
1
1
2
2
3
3
4
4
11 2 7 2 2 4 2 4 0
2 17.5 2 15.5 4 1 0 1 0
7 2 9 2 2 4 0 0 0
2 15.5 2 16.5 0 1 0 0 01
2 4 2 0 20 0 16 4 016
4 1 4 1 0 34 0 32 0
2 0 0 0 16 0 18 4 0
4 1 0 0 4 32 4 33 1
u
v
u
v
u
v
u
v
Ku = f
系统方程可表示为:
例题
52

有限单元法 崔向阳
3
3
4
4
011 2 7 2 2 4 2 4 0
02 17.5 2 15.5 4 1 0 1 0
07 2 9 2 2 4 0 0 0
02 15.5 2 16.5 0 1 0 0 01
2 4 2 0 20 0 16 4 016
4 1 4 1 0 34 0 32 0
2 0 0 0 16 0 18 4 0
4 1 0 0 4 32 4 33 1
u
v
u
v
Ku = f
施加 BCs: 1 11( 0, 0)u v
3 33( , )u v
4 44( , )u v
2 22( 0, 0)u v
5
6
7
8
0.6282
7.6859
1.2564
8.1663
u
u
u
u
例题
53
有限单元法 崔向阳
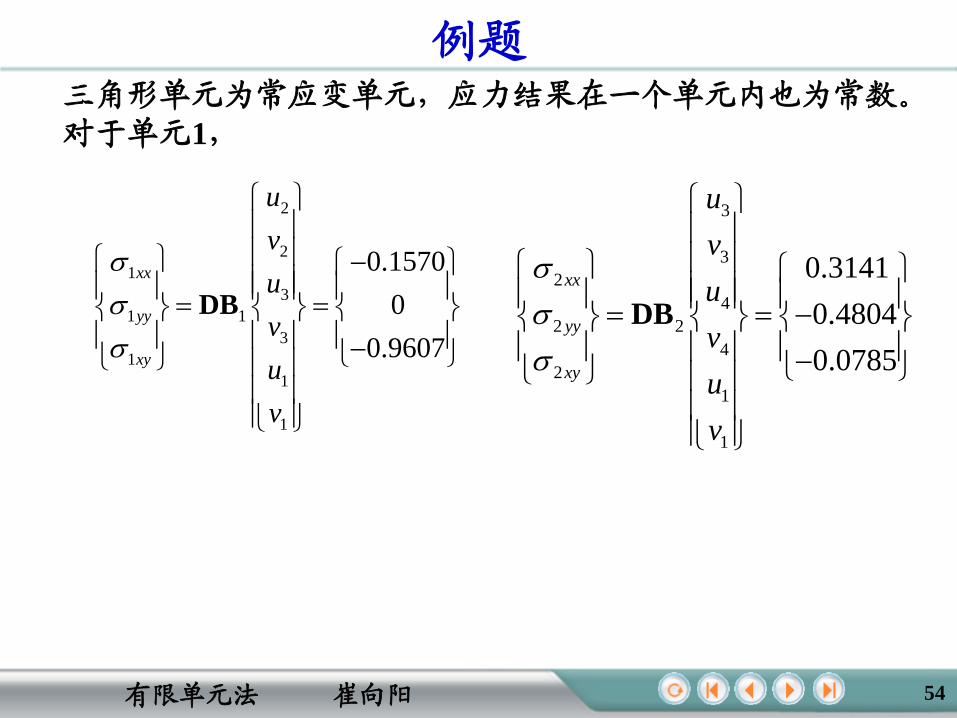
例题三角形单元为常应变单元,应力结果在一个单元内也为常数。对于单元1,
2
2
1
3
1 1
3
1
1
1
0.1570
0
0.9607
xx
yy
xy
u
v
u
v
u
v
DB
3
3
2
4
2 2
4
2
1
1
0.3141
0.4804
0.0785
xx
yy
xy
u
v
u
v
u
v
DB
54
有限单元法 崔向阳
例题0.1570
0
0.9607
0.3141
0.4804
0.0785
0.0785
0.2402
0.5196
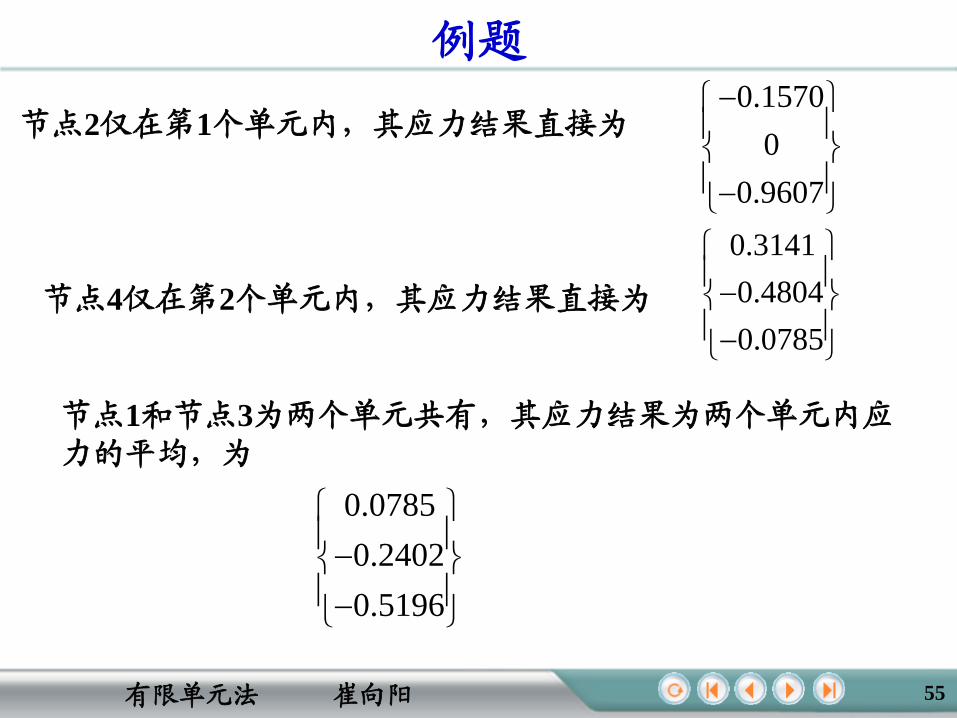
节点2仅在第1个单元内,其应力结果直接为
节点4仅在第2个单元内,其应力结果直接为
节点1和节点3为两个单元共有,其应力结果为两个单元内应力的平均,为
55
有限单元法 崔向阳 56