ハンディgps -...
TRANSCRIPT

ハンディGPS
山林内における機種別精度検証
報告書

1.はじめに
2.検証実施環境
検証日 : 平成22年3月16日、4月1日の2日間
検証場所 : 栃木県佐野市岩崎地区
現場状況 : 林齢51年 ヒノキ 間伐後4年
地形 : 北斜面 高低角約23度、標高230m
面積 : 4,626平方メートル 12測点
(トータルステーション計測)
これまで困難だった森林内施業地におけるGPSの利用が、GPSの性能向上によりここ
数年で急速に普及してきた。しかし、いくらGPSの性能が向上しても、木々の生い茂った山林
内という環境では、当然位置精度は低下する。森林内調査向けのGPSは数多く販売されてお
り、これまで機種別に山林内での精度検証を行った事例は報告されているが、同一条件下で
複数のGPSを一度に比較する精度検証の例は少ない。
今回、森林内施業地を検証フィールドとして測量機器を持込み、公共測量作業規程に準じ
て境界点を設置し、代表的な携帯型GPSを観測時間や観測方法を変え、測位精度の検証を行っ
た。
林内状況図
上空状況
検証箇所平面図
1
3.検証対象機材
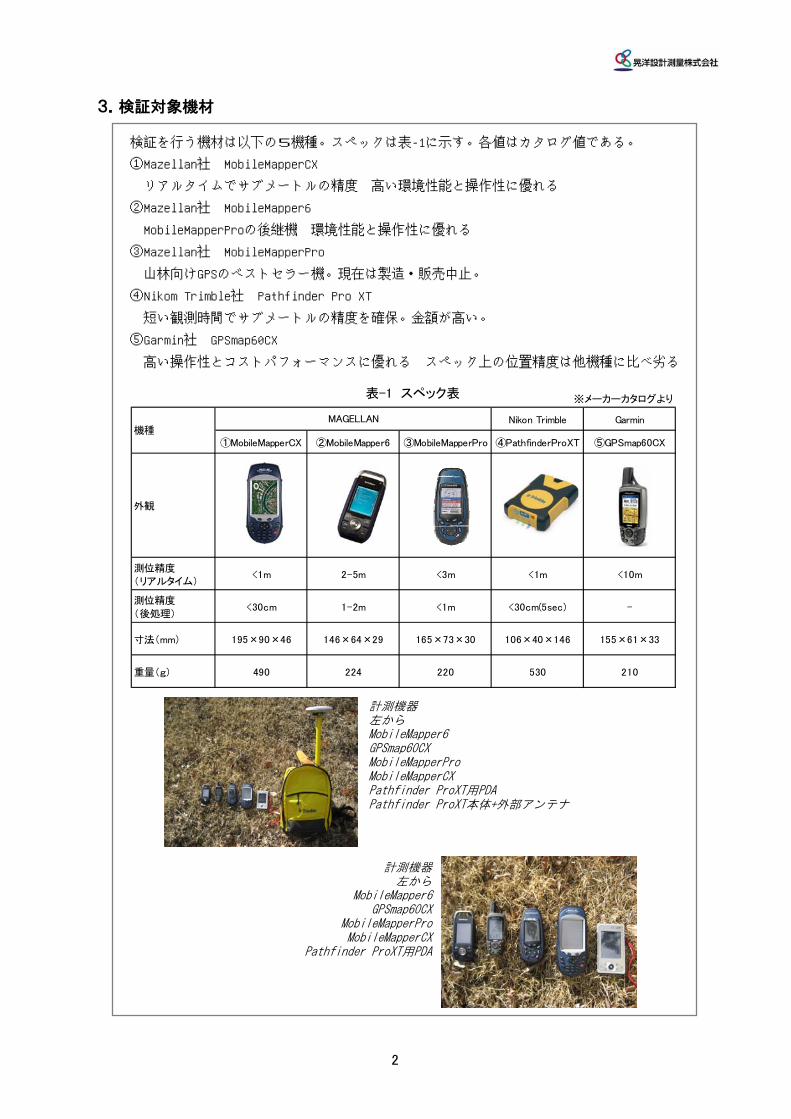
検証を行う機材は以下の5機種。スペックは表-1に示す。各値はカタログ値である。
①Mazellan社 MobileMapperCX
リアルタイムでサブメートルの精度 高い環境性能と操作性に優れる
②Mazellan社 MobileMapper6
MobileMapperProの後継機 環境性能と操作性に優れる
③Mazellan社 MobileMapperPro
山林向けGPSのベストセラー機。現在は製造・販売中止。
④Nikom Trimble社 Pathfinder Pro XT
短い観測時間でサブメートルの精度を確保。金額が高い。
⑤Garmin社 GPSmap60CX
高い操作性とコストパフォーマンスに優れる スペック上の位置精度は他機種に比べ劣る
計測機器左からMobileMapper6GPSmap60CXMobileMapperProMobileMapperCXPathfinder ProXT用PDAPathfinder ProXT本体+外部アンテナ
計測機器左から
MobileMapper6GPSmap60CX
MobileMapperProMobileMapperCX
Pathfinder ProXT用PDA
Nikon Trimble Garmin
①MobileMapperCX ②MobileMapper6 ③MobileMapperPro ④PathfinderProXT ⑤GPSmap60CX
外観
測位精度(リアルタイム)
<1m 2-5m <3m <1m <10m
測位精度
(後処理)<30cm 1-2m <1m <30cm(5sec) -
寸法(mm) 195×90×46 146×64×29 165×73×30 106×40×146 155×61×33
重量(g) 490 224 220 530 210
MAGELLAN機種
表-1 スペック表 ※メーカーカタログより
2

4.基準点・境界点設置
写真左:ネットワーク型RTKーGPS測量の観測状況
写真下:黄色い端末が観測した結果を記録する「データコレクタ」
今回の検証用に、基準点と小班境に境界点を設けた。
基準点は既知点がないため新たに設置した。検証実施場所に近い上空が開けている場所に
「ネットワーク型RTK-GPS法」の観測で設置した。ネットワーク型RTK-GPS法は山林のような
基準点がない場所でも、上空が開け、携帯電話が通じる場所であれば、短い観測時間で基準
点を設置できるのが特徴である。精度確認のため2箇所基準点を設置し、トータルステー
ションにて精度検証を行った。
境界点は、基準点よりトータルステーションで検証実施場所に設置した測点を放射で観測
を行った。(図1参照)
これらの作業はすべて「公共測量作業規程の準則」に準じている。
境界点間観測・境界観測
ネットワーク型RTKーGPS測量
写真左
トータルステーション
写真下
測点間を観測するためのミラー
写真上:境界点観測作業
3

5.検証方法
2010年 3月16日と同年 4月 1日の2日間で栃木県佐野市岩崎地内において検証作業を行っ
た。
検証対象機種はMobileMapperCX,MobileMapper6,MobileMapperPro,Pro XT,GPSmap60CXの5
機種。観測するデータ機種の仕様上、MobileMapperCX,MobileMapper6,MobileMapperProの3
機種は国土地理院の電子基準点の補正データを使用して補正を行う後処理補正データ。
Pathfinder PRO XT、GPSmap60CXの2機種はリアルタイム補正のデータである。
観測はあらかじめ設置した境界点(図-2)12点を5機種同時観測した。
観測は観測者自身が衛星捕捉を遮断しないようにGPSmap60CX以外は外部アンテナを使用し
た。MobileMapperの3機種は伸縮ポール先端に設置したアンテナ台座に固定(図-3)。
Pathfinder Pro XTは専用アンテナ台座付き背負子(図-4)を使用した。
図-3:外部アンテナ設置状況 図-4:Trimble ProXT外部アンテナ
図-2観測対象地
境界点
5

各GPS端末の電源は観測前の30分前に受信状態の良い上空が開けた場所で入れた。
観測時間はMobileMapperCX,6,Proが30秒、60秒、180秒。Pathfinder ProXTは5回測位と3
0回測位。GPSmap60CXは1回測位と30回測位の観測を実施した(図-4)。観測は観測地点へ移
動してから30秒間静止(図-5)した後に行った。
また、観測時間の都合により観測は2日に分けて実施した。観測時間帯を事前に図6の衛
星情報を確認し、衛星数7以上、PDOP値2.5以下の条件で観測を行った。
図-4 図-5
図-6 衛星情報
観測日:2010年4月1日
観測日:2010年3月16日
(出典:株式会社ジェノバ[国土位置情報 PAS]http://www.jenoba.jp/pas/planning/planning.html,2010年4月1日)
6
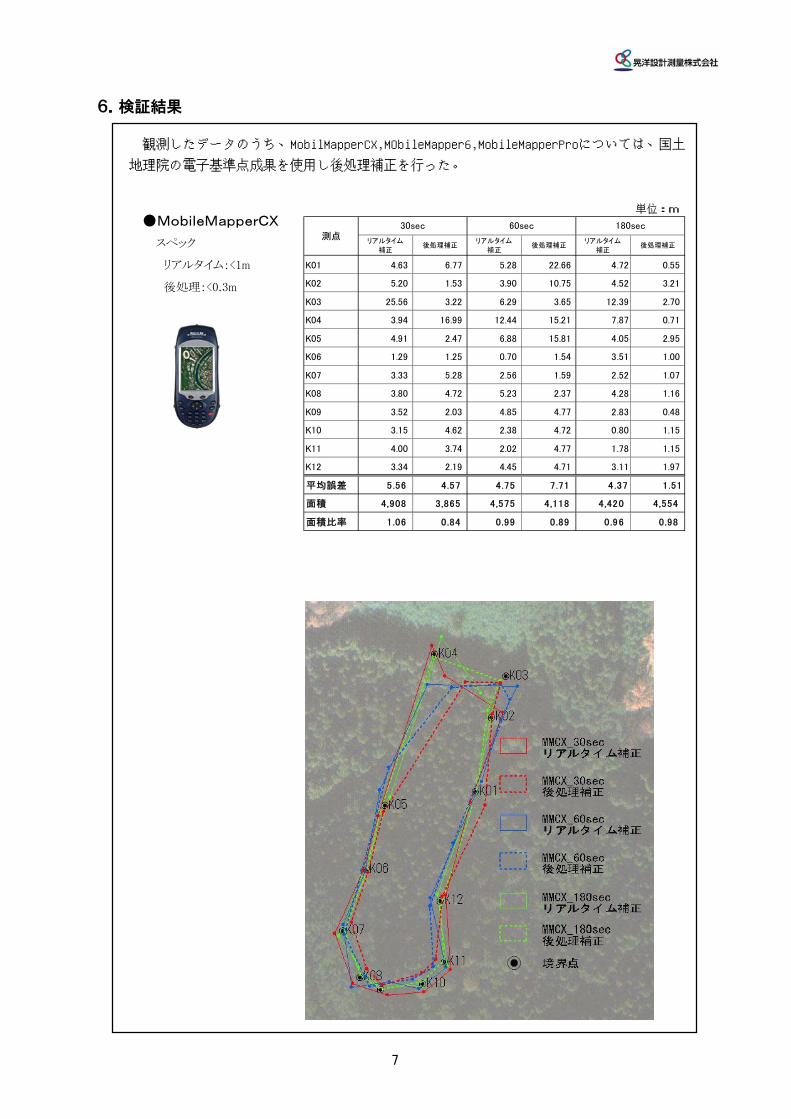
6.検証結果
観測したデータのうち、MobilMapperCX,MObileMapper6,MobileMapperProについては、国土
地理院の電子基準点成果を使用し後処理補正を行った。
単位:m●MobileMapperCX
スペック
リアルタイム:<1m
後処理:<0.3m
リアルタイム
補正後処理補正
リアルタイム
補正後処理補正
リアルタイム
補正後処理補正
K01 4.63 6.77 5.28 22.66 4.72 0.55
K02 5.20 1.53 3.90 10.75 4.52 3.21
K03 25.56 3.22 6.29 3.65 12.39 2.70
K04 3.94 16.99 12.44 15.21 7.87 0.71
K05 4.91 2.47 6.88 15.81 4.05 2.95
K06 1.29 1.25 0.70 1.54 3.51 1.00
K07 3.33 5.28 2.56 1.59 2.52 1.07
K08 3.80 4.72 5.23 2.37 4.28 1.16
K09 3.52 2.03 4.85 4.77 2.83 0.48
K10 3.15 4.62 2.38 4.72 0.80 1.15
K11 4.00 3.74 2.02 4.77 1.78 1.15
K12 3.34 2.19 4.45 4.71 3.11 1.97
平均誤差 5.56 4.57 4.75 7.71 4 .37 1.51
面積 4,908 3,865 4,575 4,118 4,420 4,554
面積比率 1.06 0.84 0.99 0.89 0.96 0.98
30sec 60sec 180sec測点
7

6.検証結果
観測したデータのうち、MobilMapperCX,MObileMapper6,MobileMapperProについては、国土
地理院の電子基準点成果を使用し後処理補正を行った。
●MobileMapper6
スペック
リアルタイム:2-5m
後処理:1-2m
リアルタイム
補正後処理補正
リアルタイム
補正後処理補正
リアルタイム
補正後処理補正
K01 10.09 6.22 12.18 3.92 3.55 0.54
K02 12.28 8.43 4.02 3.12 3.64 2.03
K03 8.12 4.96 7.89 7.45 5.67 2.56
K04 8.88 4.69 4.12 8.89 10.14 2.35
K05 5.70 0.85 5.71 2.38 0.96 0.79
K06 3.47 1.59 6.72 2.79 4.20 2.85
K07 4.72 2.12 1.67 4.12 6.64 0.69
K08 3.38 3.13 6.86 2.65 4.38 1.58
K09 3.80 2.29 4.10 1.60 5.20 3.45
K10 2.24 1.84 2.18 2.81 2.95 1.43
K11 4.78 1.41 1.69 2.83 4.04 1.80
K12 6.77 2.39 3.80 2.17 0.46 0.21
平均誤差 6.19 3.33 5.08 3.73 4.32 1.69
面積 4,910 4,881 4,571 4,328 4,865 4,701
面積比率 1.06 1.06 0.99 0.94 1.05 1.02
30sec 60sec 180sec測点
単位:m
7

●MobileMapperPro
スペック
リアルタイム:<3m
後処理:<1m
リアルタイム
補正後処理補正
リアルタイム
補正後処理補正
リアルタイム
補正後処理補正
K01 25.52 4.98 15.90 20.90 3.07 3.26
K02 0.58 6.19 1.74 2.92 0.95 4.04
K03 11.07 9.52 9.41 1.09 11.39 4.25
K04 13.89 9.64 24.08 13.62 3.09 6.68
K05 7.73 2.28 7.58 2.21 1.54 1.55
K06 4.41 2.38 3.79 3.41 3.11 1.70
K07 2.97 5.51 1.25 4.09 6.98 1.98
K08 5.34 5.40 4.64 3.10 8.20 3.51
K09 4.30 5.55 8.59 4.14 4.64 1.70
K10 5.74 5.63 4.56 3.85 5.90 1.88
K11 3.58 4.54 7.90 4.76 5.85 1.53
K12 4.41 2.36 10.84 5.53 6.18 3.45
平均誤差 7.46 5.33 8.36 5.80 5.08 2.96
面積 5,423 4,047 4,915 3,773 5,032 4,459
面積比率 1.17 0.87 1.06 0.82 1.09 0.96
30sec 60sec 180sec測点
単位:m
8

●Nikon Trimble Pathfinder Pro XT
スペック
リアルタイム:<1m
後処理: -
●Garmin GPSmap60CX
スペック
リアルタイム:<1m
後処理: -
5回測位 30回測位
K01 3.10 2.72
K02 5.70 1.17
K03 1.96 7.20
K04 0.25 3.45
K05 1.47 1.78
K06 4.15 1.61
K07 0.43 0.56
K08 0.82 0.70
K09 0.64 0.26
K10 0.81 1.28
K11 1.92 1.28
K12 1.35 3.22
平均誤差 1.88 2 .10
面積 4,685 4 ,5 55
面積比率 1 .01 0 .9 8
リアルタイム補正測点
1回測位 30回測位
K01 4.64 5.39
K02 5.58 4.41
K03 7.54 13.14
K04 6.20 4.81
K05 7.33 1.76
K06 1.97 1.34
K07 2.30 6.71
K08 3.75 0.98
K09 1.62 1.47
K10 4.14 2.45
K11 6.26 1.74
K12 12.63 3.91
平均誤差 5.33 4 .01
面積 4,239 4 ,3 51
面積比率 0 .92 0 .9 4
リアルタイム補正測点
単位:m
単位:m
8

6.検証結果
MobileMapperCX MobileMapper6 MobileMapperPro PathFinderXT GPS60CX
リアルタイム - - - - 5.33
面積比率 - - - - 0.92
リアルタイム - - - 1.88 -
面積比率 - - - 1.01 -
リアルタイム - - - 2.10 4.01
面積 - - - 0.98 0.94
リアルタイム 5.56 6.19 7.46 - -
面積 1.06 1.06 1.17 - -
後処理 4.57 3.33 5.33 - -
面積 0.84 1.06 0.87 - -
リアルタイム 4.75 5.08 8.36 - -
面積 0.99 0.99 1.06 - -
後処理 7.71 3.73 5.80 - -
面積 0.89 0.94 0.82 - -
リアルタイム 4.37 4.32 5.09 - -
面積 0.96 1.05 1.09 - -
後処理 1.51 1.69 2.96 - -
面積 0.98 1.02 0.96 - -
30sec
60sec
180sec
1回測位
5回測位
30回測位
機種
観測方法
表-3 観測結果一覧表
観測結果をまとめたものを表-3に示す。はじめに機種別に評価を行い、最後に全体を総括
して評価する。
まずMobileMapperシリーズ3機種から。観測時間による結果を比較すると、リアルタイ
ム、後処理とも180秒観測の精度が良かった。これは観測時間が短くなると誤差を含んだデー
タの割合が多くなるのが原因と思われ、1番良い結果に比べ2~3倍誤差が増える傾向にあ
る。観測誤差による比較では3機種とも、後処理を行ったものがリアルタイムに比べ誤差が
少なかった。これは山林内の観測でも電離層や対流圏の電波の遅延による誤差等を除去する
国土地理院の電子基準点による後処理補正の効果があることが証明された。
次にリアルタイム補正観測のPathFinder ProXTとGPSmap60CX。PathFinderは5回観測、30回
観測とも誤差2.0m前後で、測位回数による誤差の影響はほとんどなかった。GPSmap60CXは、
測位回数が増加するほど誤差は少なくなる傾向にあった。
最後に5機種を総括して評価する。機種により観測時間、補正方法が異なるため同一条件の
比較とならないが、本検証で一番誤差が少なかったのはMobileMapperCX(観測時間180秒,誤
差1.51m)。次にMobileMapper6(観測時間180秒,誤差1.69m)、PathFinder ProXT(5回測位,
誤差1.88m)。以後MobiieMapperPro、GPSmap60CXの順である。観測精度が求められる場合に
はMobileMapperCX,MobileMapper6が。リアルタイム補正で2mぐらいの精度で十分な場合には
Pathfinder ProXTが良い。現在地を確認したり、精度を気にせずに手軽にポイントを記録し
たい場合にはGPSmap60CXが好ましい。
9

7.まとめ
○MobileMapperCX,MobileMapper6,MobileMapperPro(販売終了)
高い観測精度を得るために、1箇所あたり3分程度の観測時間を要するが、外部アンテナ、
ポールを使用することにより、観測中はポールを地面に刺して他の作業を行うことができる
(図-7)。金額はPathfinder ProXTと比べると1/2~1/3のため、日常業務の補助ツールとし
て、GPSを数多く揃え、積極的に活用したいときに向いている。
○Pathfinder ProXT
観測時間は短くても誤差2.0m程度の精度が得られる。しかし、外部アンテナを背中に背負
い、観測中は動かず、その場に静止していなくてはならないため、あまり日常業務向きではな
い。また、観測用ソフト等を入れると総額で高くなってしまう。短期間に多くの地点を観測す
る業務のときは有効な機種である。
○GPSmap60CX
リアルタイム補正の結果しか得られないため、観測精度は時間を掛けて観測しても森林内で
は4.0m位が限界と思われる。しかし、世界中で利用されているだけあって、操作性、視認性は
優れている。金額も手頃である。自分の位置の確認や境界などの目標物を手軽に観測したい利
用には有効な機種である。森林基本図などユーザー側独自の地図を背景図に読み込むことがで
きないのが難である。
その他、GPSの観測にあたり精度を向上させる注意点として、①観測地点に立ち止まってか
ら数秒おいてから観測を始めること、②事前に観測日の衛星の状況を把握してから観測を行う
の2点が挙げられる。
①はGPS観測の鉄則である。本検証はすべて観測前に30秒間静止している。本検証に載せて
いないが、観測前に静止せずに観測した結果は後処理を行っても約3倍精度が低下する結果が
出ている。
②は事前にWEBサイト(株式会社ジェノバ[国土位置精度PAS],http:jenoba.jp/pas/planning/
planningpas/planning/planning)より観測日の衛星配置を確認し、観測スケジュールを立てる
のが好ましい。数値で重視するのが衛星の配置に起因した精度の劣化を数値で表すPDOPの値で
ある。衛星数が同じでもPDOP値は時間毎に変わってくる。数値の低いほうが精度は向上し、3
以下が好ましいとされているが森林内での観測を考慮し2.5以下の時間帯を選ぶことが精度向
上に繋がる。また、PDOP値は端末上でリアルタイムで確認ができるので、観測時に数値が高く
(精度が悪く)なった時は観測時間を少し長めにするなどの工夫が必要である。しかし、地形
的な条件でGPSの観測が困難な場所では、レーザー測距器などを使用した観測に切り替えるな
どの対応も必要だ。
今後は、観測精度が落ちる樹冠が混みいった場所、谷筋や斜面の勾配がきつい場所でのGPS
の観測誤差について調査を行い、さらなるGPS観測の最適な観測方法を確立していきたいと
思っている。
図-7
10