kinematics 一、运动学的研究对象及任务 1 .研究对象 point(particle), rigid body and...
TRANSCRIPT
Kinematics
一、运动学的研究对象及任务 1 .研究对象 Point(particle), Rigid body and System of Rigid
Bodies.
Point: 不计大小的几何点 .
2 .研究任务(1) 研究物体的机械运动及运动 的几何性质。(2) 研究机构传动规律。

例 1 观察轮缘上 M 点的运动轨迹
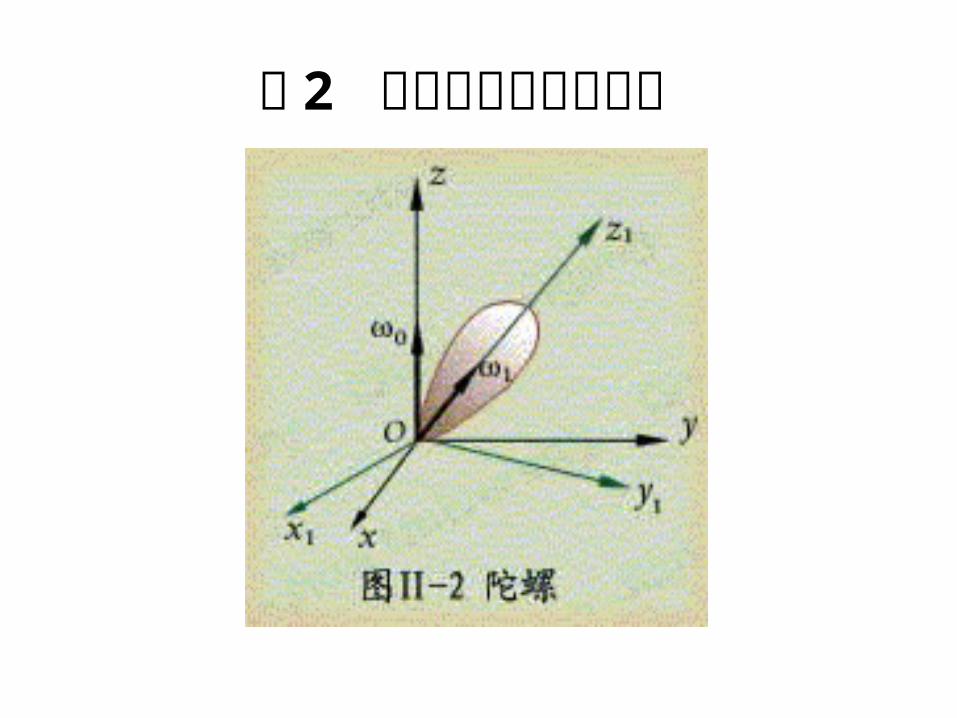
例 2 观察陀螺的运动特点

例 3 观察机构传动关系及点运动轨迹

二、学习运动学的目的1 学习动力学的基础
受力分析和运动分析是学习动力学的两大基础。
2 学习机械原理和设计传动机构的基础。
三、研究方法不考虑致动原因,只研究运动的几何性质。

Chapter 6 Kinetics of a Particle6.1 Position, Velocity and Acceleration of a Point:
Vector Method
)(trr rr
v dt
dt)( rv
va
dt
dt)(
nτa nt aat )(
Curvilinear Motion Of a Particle:
path. theof curvature of radius :
. , :Where2
2
2
v
adt
sd
dt
dva nt

6.2 Rectangular Coordinates, Curvilinear Coordinates,
Polar and Cylindrical Coordinates, etc..
Path:
)(
)(
)(
3
2
1
tfz
tfy
tfx消去 t 可以得到轨迹方程。
Position:
Curvature:
2/32
2
2
])(1[
1
dxdydx
yd



Chapter 7 Kinematics of Rigid Bodies: Simple motions Defination: Translation and rotation about a fixed axis of ri
gid bodies are called the simple motions of rigid bodies.
特点:刚体的简单运动是刚体运动的最简单形式 , 是不可分解的运动基本形态。刚体的复杂运动均可分解成若干简单运动的合成。
A rigid body is said to be translating if all lines in the body
remain parallel to their original positions.Since the shapes
of paths for every particle in a translating rigid body ar
e same, the velocities and accelerations of all points of the
body are equal. The kinematics of translation reduces to the
kinematics of a single point. 关键是平动的判定 .
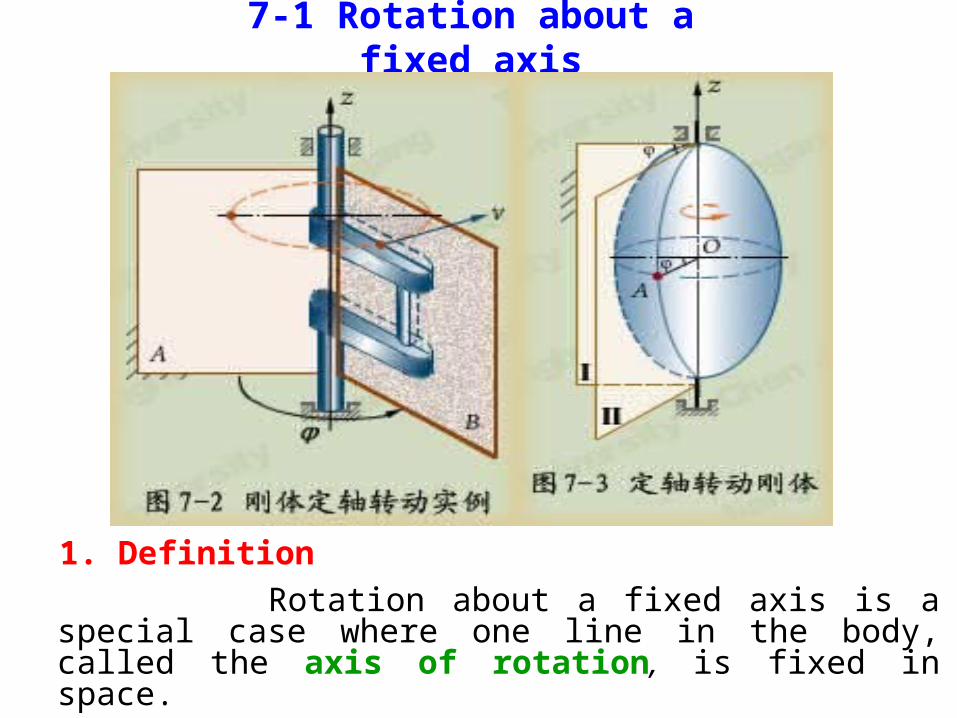
7-1 Rotation about a fixed axis
1. Definition
Rotation about a fixed axis is a special case where one line in the body, called the axis of rotation, is fixed in space.

2. Characteristics
Since the body is rigid, the path of each point (except points on the axis of rotation) is a circle, which lies in a plane perpendicular to the axis of rotation, with its center on the axis of rotation.
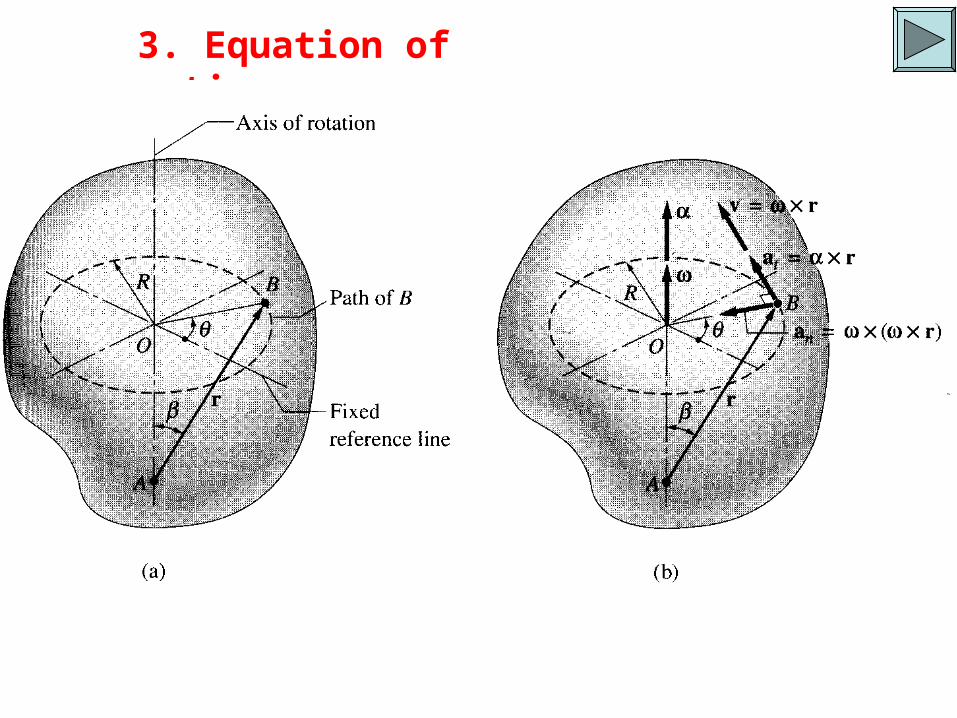
3. Equation of motion

Obviously, can determine the position of the body.
Thus the angular position of a rigid body that is rotating
about a fixed axis is specified by a scalar function as
following
= (t) (7.3a)
If the unit vector of the rotation axis is donated by k, as
right hand rule shown in the Fig. 7.3(c) the angular
displacement can also be represented as a vector as
= (t) k (7.3b)
where four fingers of right hand represent the direction of
the rotation and the thumb represents the direction of the
angular velocity vector.
4. Angular velocity and acceleration Taking the time derivative of Eq. (7.3b) while noting t
hat dk/dt=0 yields = k =(d/dt) k (7.4) where is the angular velocity of the body with magn
itude . Differentiating Eq. (7.4) with respect to time we ha
ve = k = =(d/dt) k (7.5) where is the angular acceleration of the body with
magnitude . It should be noted that , and are angular, i.e. int
egral, position, velocity and acceleration vectors of the body.

In engineering, number of revolution per minute n (r
ev/min) is usually used as unit of angular velocity. It has
the relation with (rad/s) as following
3060
2 nn (7.6)
Two important special cases:
(1) Uniformly Rotation = constant
= 0 + t (7.7)
where 0 is the initial angular position of the body.
(2) Uniformly Changeable Velocity Rotation
=constant
= 0 + t (7.8)
= 0 +0 t +0.5 t2 (7.9)
where 0 and 0 are the initial angular position and
velocity of the body.
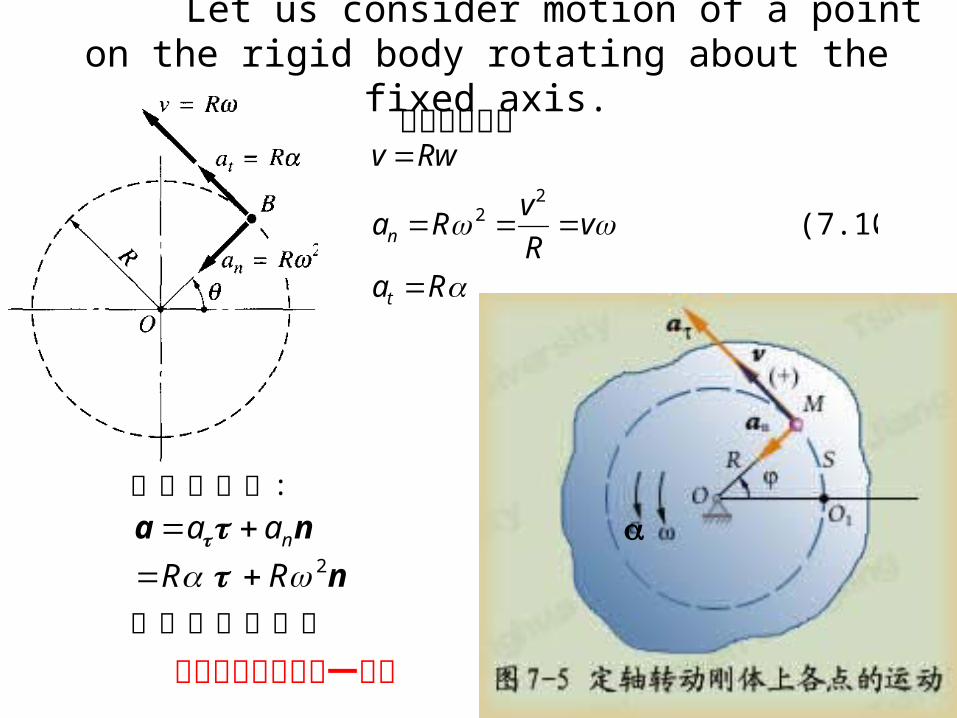
Let us consider motion of a point on the rigid body rotating about the fixed axis.
Ra
vR
vRa
Rwv
t
n
(7.10) 2
2
由点的运动学
注意转向与指向的一致性
全加速度为:
na naa R n2R
各矢量方向如图
The vector form of the velocity and acceleration of B is
V = r = r and )()( rαrωωa
(1) v is tangent to the path of B; (2) the acceleration component (r) is directed toward O, i.e., normal to the path; and (3) the acceleration component r is tangent to the path. In Fig. 7.3(b) we refer to the acceleration components as an and at, because they turn out to be identical to the normal and tangential acceleration components of particle. Recognizing from Fig. 7.3(a) that rsin = R, the magnitude of the velocity vector is v = |r | = rsin = R. The magnitudes of the acceleration components are an = |(r)| = |r | = 2 rsin =2 R and at,= |r| = rsin = R.
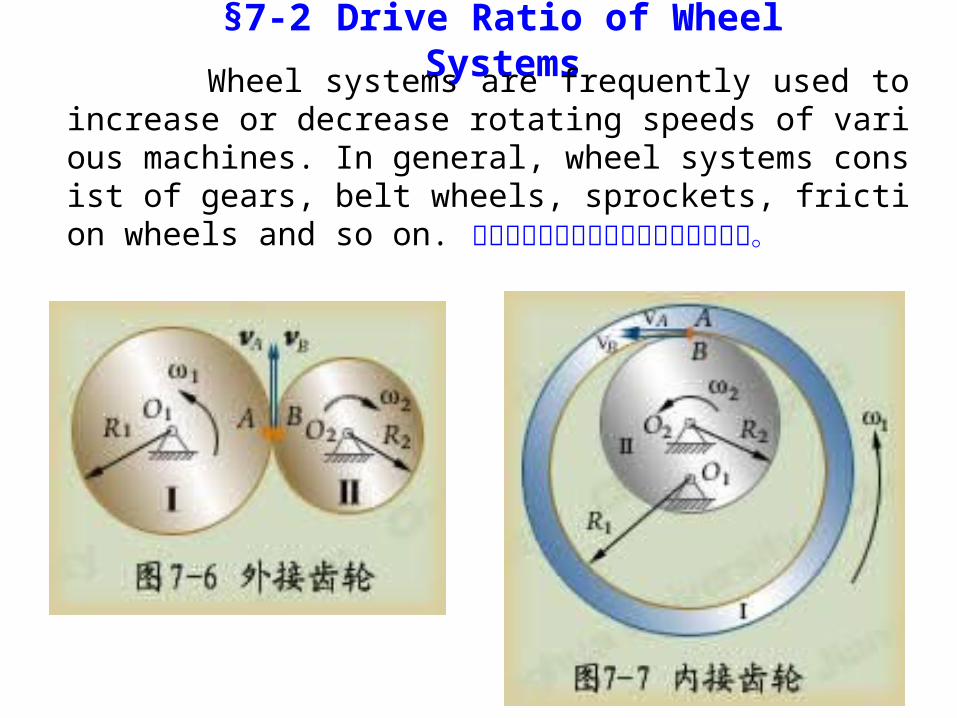
§7-2 Drive Ratio of Wheel Systems Wheel systems are frequently used to increase or decr
ease rotating speeds of various machines. In general, wheel systems consist of gears, belt wheels, sprockets, friction wheels and so on. 各轮均作定轴转动的轮系称为定轴轮系。

1. Definition
The ratio of driving wheel angular velocity to driven wheel angular velocity is called the drive ratio, i.e.
i12 = 1 2 n1 n2
a. Gears transmission
齿轮传动特点 : ① 两轮接触点的速度大小、方向相同。②两轮接触点的切向加速度大小、方向相同。
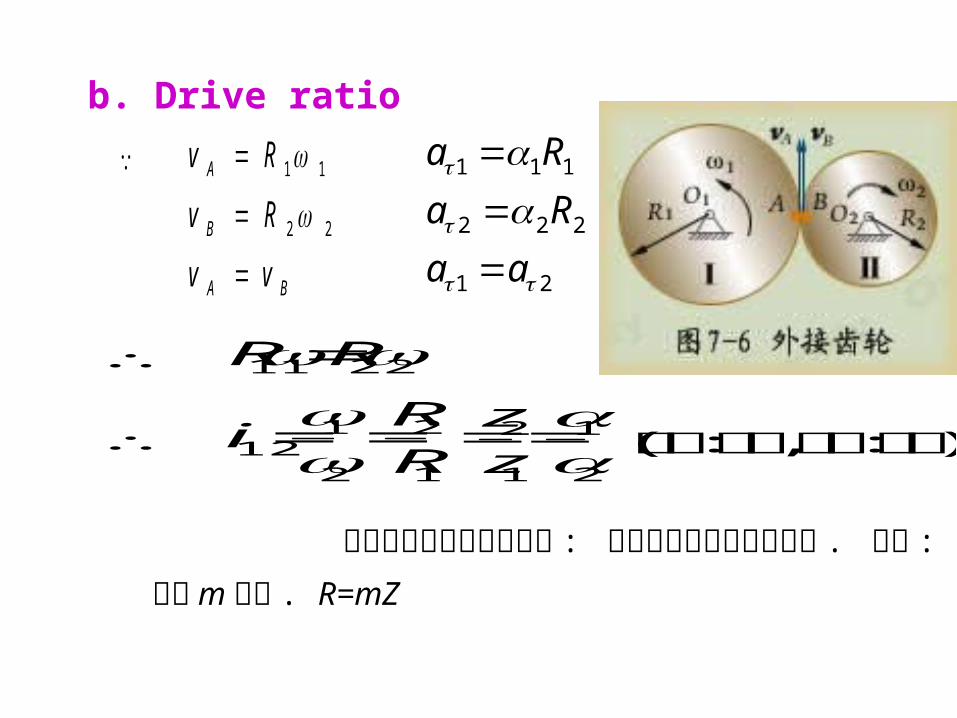
这里用到齿轮的设计原则 : 齿轮的齿数与半径成正比 .
因为 : 模数 m 相同 . R=mZ
∵ 11 Rv A
22 Rv B
BA vv
∴ 2211 RR
∴ 2
112i
1
2
R
R
2
1
1
2
z
z (外接: 反向, 内接: 同向)
b. Drive ratio
21
222
111
aa
Ra
Ra
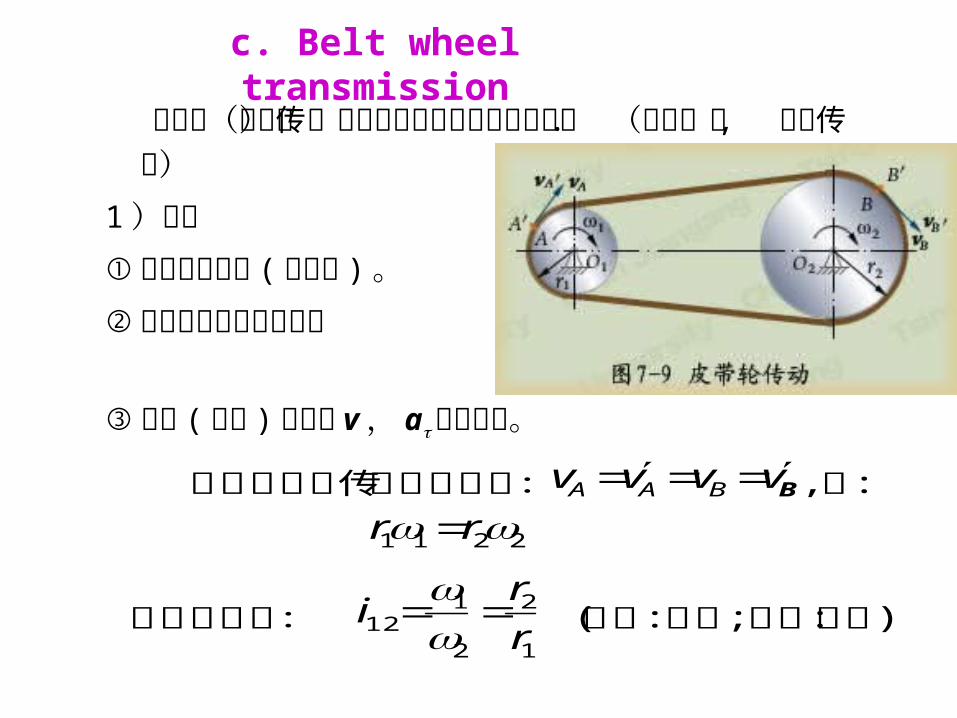
c. Belt wheel transmission
皮带轮(链轮)传动适用于两轴距离较远的情况 .
(开口传动 , 交叉传动) 1 )特点① 皮带不可伸长 ( 理想化 ) 。② 设皮带与轮之间无相对 滑
动。③ 皮带 ( 链条 ) 上各点 v , a 大小相同。由上述皮带传动特点可知: Bvvvv BAA , 得:
2211 rr
所以传动比: 1
2
2
112 r
ri
(开口: 同向; 交叉:反向)

二、轮系传动比若定轴传动轮系由 1~n 个轮组成 , 其传动比 :
i 1,n = 1 / n
1, ( )( 1)
1, ( )k n
n
在 间啮合的各从动轮半径 齿数的乘积在 间啮合的各主动轮半径 齿数的乘积
‘-’ 表示反向传动 ;
k: 轮系中外啮合齿轮和交叉皮带传动的次数 .

A reducing gear box consists of four gears as shown in Fig. (a). Gear II and gear III are on same shaft. Tooth numbers for these gears are: z1=36, z2=112, z3=32, z4=128. Revolution number per minute of driving shaft I is: n=1450 rev/min. Determine revolution number per minute of driven shaft IV.
31
422
4
114 )1(
zz
zz
n
ni 4.12
3236
128112
Ⅳ Ⅰ可见,从动轮 和主动轮 的转向相同。
Ⅳ最后,求得从动轮 的转速为
1174.12
1450
14
14
i
nn r/m in
Solution
Using n1, n2, n3 and n4 to expressing angular velocity of four
gears and noting n2=n3, we find
Sample problem 7.1

7.3 Poisson Formula
kωk
jωj
iωi
dt
ddt
ddt
d