mems センサを用いた 小型 ins/gps 航法装置 の開発
DESCRIPTION
MEMS センサを用いた 小型 INS/GPS 航法装置 の開発. 56367 成岡 優 指導教員 : 土屋助教授. 概要. 背景 : 小型、軽量、安価かつ高精度な航法装置の必要性 手法 評価 : 精度 はどれくらいか ? 結論. 背景 (1/5) 高精度な航法データの必要性. 多くのアプリケーションて精度よい航法情報 ( 位置や速度、姿勢 ) が必要とされる 飛行機や宇宙機のナビゲーション 車や電車等の移動体の監視 ロボットや UAV の誘導制御. 航空機で培われたナビゲーション技術 を 汎用的に利用することはできないか ?. - PowerPoint PPT PresentationTRANSCRIPT
1
MEMS センサを用いた小型 INS/GPS 航法装置
の開発
56367 成岡 優指導教員 : 土屋助教授
23/04/20 修士輪講会 2006 2
MEMS センサを用いた小型 INS/GPS 航法装置の開発
概要1. 背景 : 小型、軽量、安価かつ高精
度な航法装置の必要性2. 手法3. 評価 : 精度はどれくらいか ?
4. 結論
23/04/20 修士輪講会 2006 3
MEMS センサを用いた小型 INS/GPS 航法装置の開発
背景 (1/5)高精度な航法データの必要性
多くのアプリケーションて精度よい航法情報 ( 位置や速度、姿勢 ) が必要とされる 飛行機や宇宙機のナビゲーション 車や電車等の移動体の監視 ロボットや UAV の誘導制御
航空機で培われたナビゲーション技術を汎用的に利用することはできないか ?
23/04/20 修士輪講会 2006 4
MEMS センサを用いた小型 INS/GPS 航法装置の開発
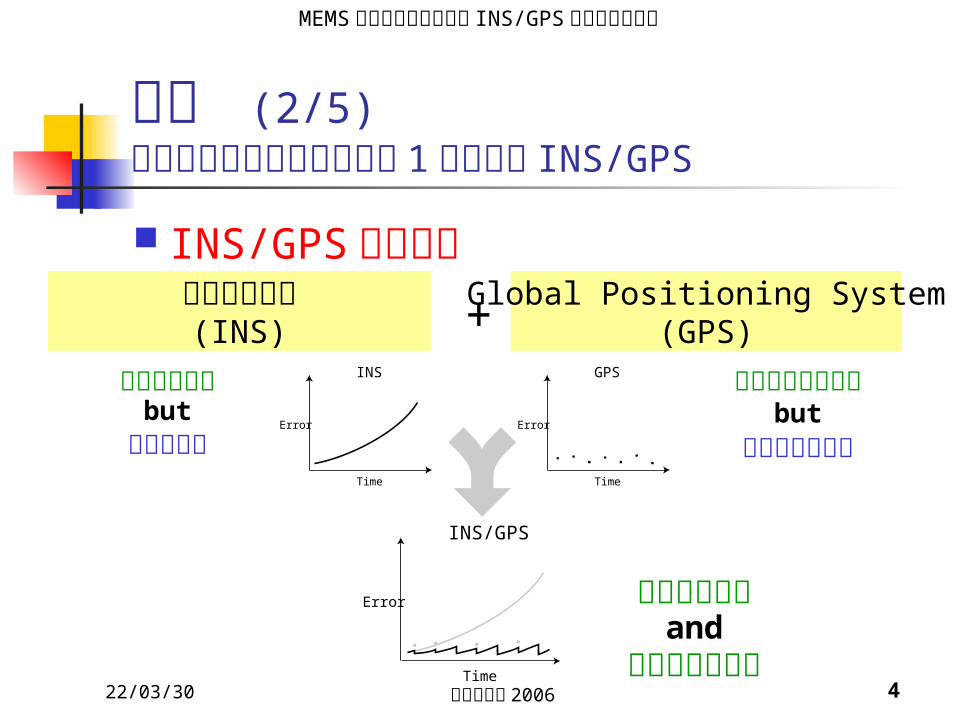
背景 (2/5)優れた航空機の航法技術の 1 つとして INS/GPS
INS/GPS 複合航法
早い更新周期but
誤差が蓄積
誤差が蓄積しないbut
更新周期が低い
早い更新周期and
誤差蓄積しない
Time
Error
INS
Time
Error
GPS
Time
Error
INS/GPS
慣性航法装置(INS)
Global Positioning System(GPS)+
23/04/20 修士輪講会 2006 5
MEMS センサを用いた小型 INS/GPS 航法装置の開発
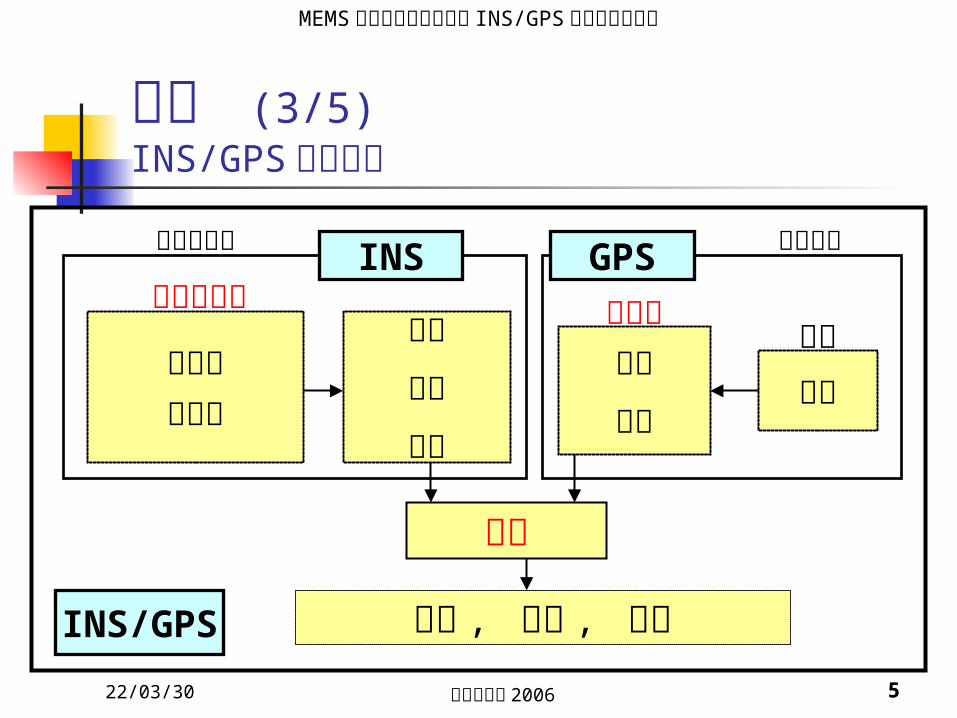
背景 (3/5)INS/GPS の仕組み
位置 , 速度 , 姿勢
慣性センサ
位置
速度
位置
速度
姿勢
INS GPS
統合
加速度
角速度
INS/GPS
電波
衛星
運動の法則 三角測量
受信機
23/04/20 修士輪講会 2006 6
MEMS センサを用いた小型 INS/GPS 航法装置の開発
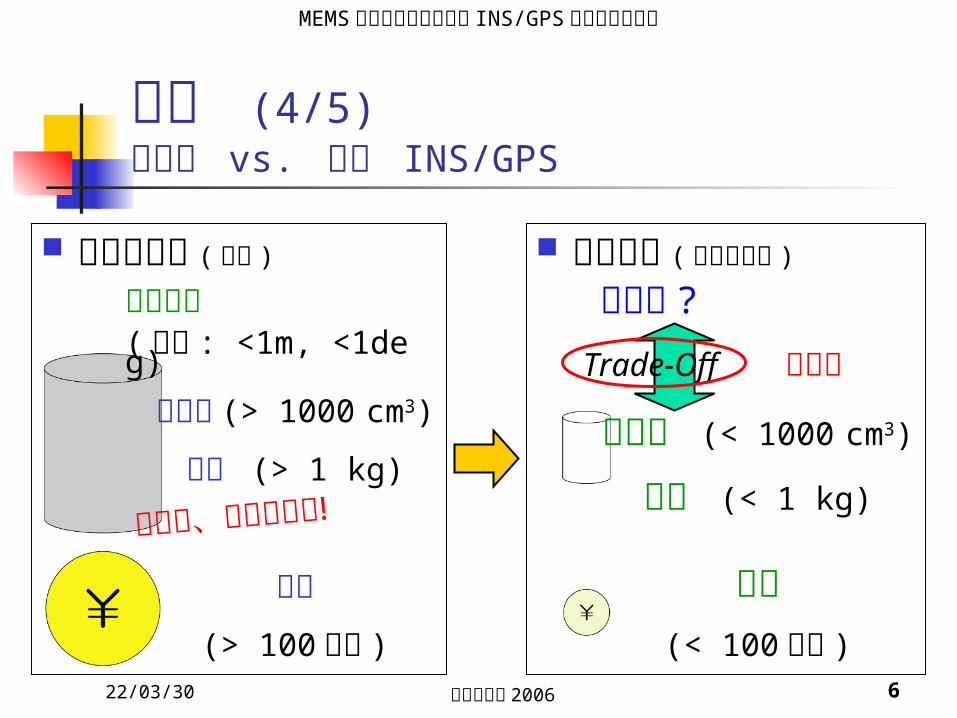
背景 (4/5)航空機 vs. 汎用 INS/GPS
航空機向け ( 既存 ) 汎用向け ( 近年開発中 )
大きい (> 1000 cm3)
重い (> 1 kg)
小さい (< 1000 cm3)
軽い (< 1 kg)
高価
(> 100 万円 )
安価
(< 100 万円 )
飛行機、宇宙機のみ !
超高精度( 誤差 : <1m, <1deg)
高精度 ?
着目点Trade-Off
23/04/20 修士輪講会 2006 7
MEMS センサを用いた小型 INS/GPS 航法装置の開発
背景 (5/5)研究目的
精度とその他スペックの間に存在するトレードオフを議論することは非常に重要である
本研究の目的1. できる限り小さく、軽く、安価な INS/G
PS 装置を構成し2. その精度を正確に評価し、汎用的に使用
可能か検討する
23/04/20 修士輪講会 2006 8
MEMS センサを用いた小型 INS/GPS 航法装置の開発
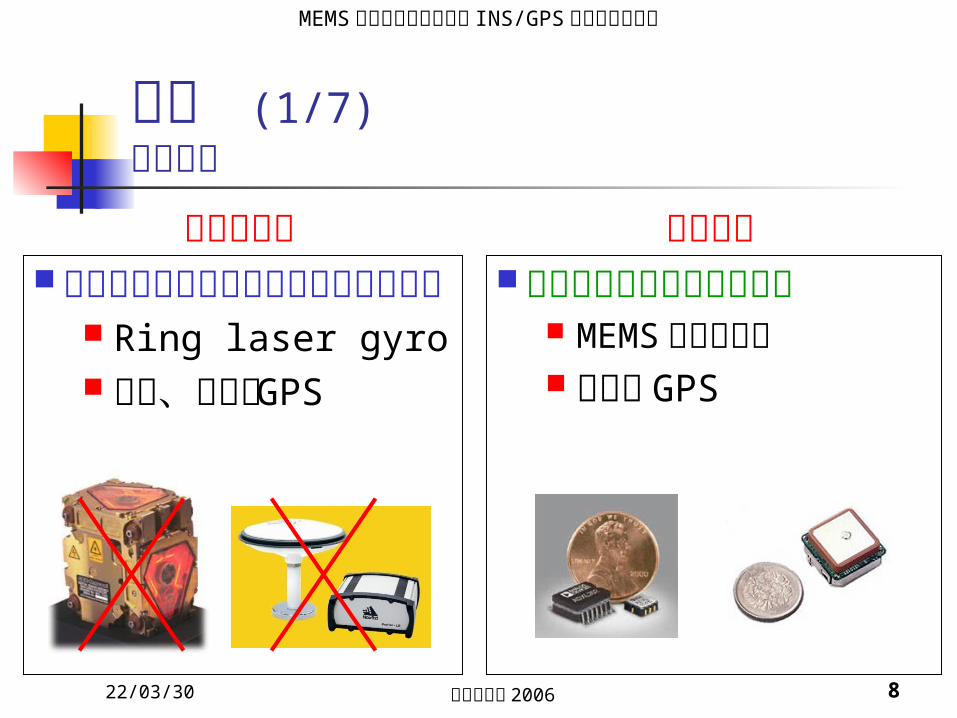
手法 (1/7)構成機器
高精度だが大きく重く高価な特殊部品 Ring laser gyro 軍用、特殊用 GPS
小さく軽く安価な汎用部品 MEMS 慣性センサ 民生用 GPS
使用しない 使用する
23/04/20 修士輪講会 2006 9
MEMS センサを用いた小型 INS/GPS 航法装置の開発
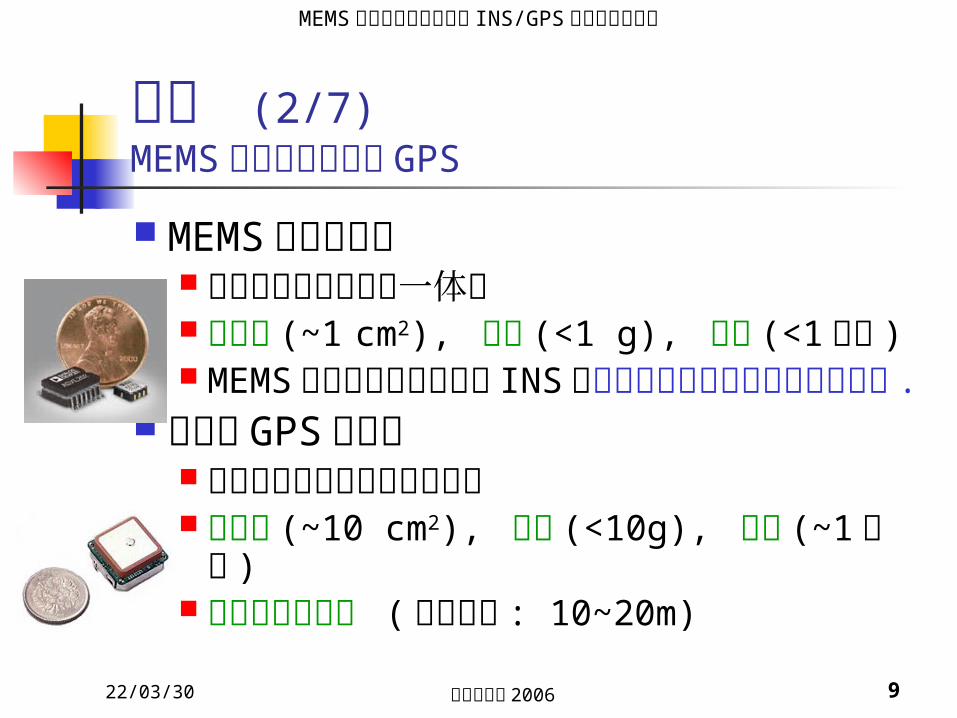
手法 (2/7)MEMS センサと民生用 GPS
MEMS 慣性センサ 電気回路と検出部を一体化 小さく (~1 cm2), 軽く (<1 g), 安価 (<1 万円 ) MEMS 慣性センサを用いた INS は誤差が非
常に早く溜まりやすい . 民生用 GPS 受信機
カーナビなどに使われている 小さく (~10 cm2), 軽く (<10g), 安価 (~1 万
円 ) 比較的よい精度 ( 位置誤差 : 10~20m)
23/04/20 修士輪講会 2006 10
MEMS センサを用いた小型 INS/GPS 航法装置の開発
手法 (3/7)INS/GPS アルゴリズム
Strap-down 構成 機械的なジンバルが必要ない
extended Kalman filtering (EKF) による統合 Loose-coupling: 計算リソースの節約
クォータニオンの活用 MEMS センサの大きな誤差を補償するための数学
的に単純なモデル オイラー角で発生するような特異点を完全に除去
23/04/20 修士輪講会 2006 11
MEMS センサを用いた小型 INS/GPS 航法装置の開発
手法 (4/7)式 (1) : INS 運動方程式
ne
eeie
eie
enn
enen
nie
nbnb
nbn
e
qr
qrg
qa
qrdt
d ~0~2
00~0~0
////
znen
en
en
ne rh
dt
dqq
dt
d
,0~
2
1~
/
bnn
ennie
bib
bn
bn qqq
dt
d ~000~2
1~
///
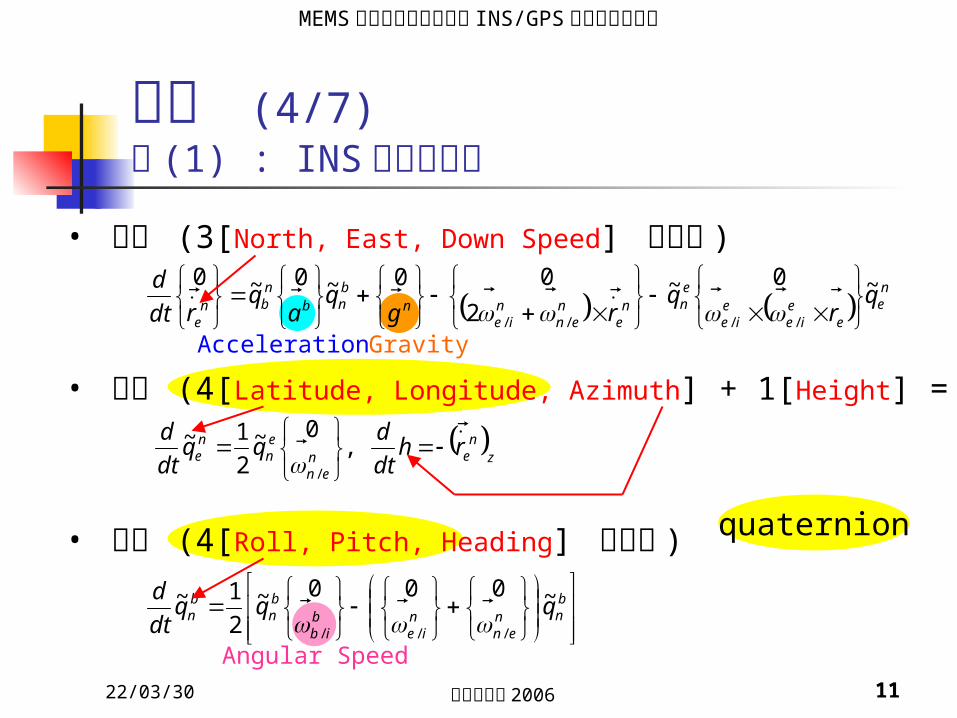
• 速度 (3[North, East, Down Speed] 状態量 )
• 位置 (4[Latitude, Longitude, Azimuth] + 1[Height] = 5 状態量 )
• 姿勢 (4[Roll, Pitch, Heading] 状態量 ) quaternion
Acceleration
Angular Speed
Gravity
23/04/20 修士輪講会 2006 12
MEMS センサを用いた小型 INS/GPS 航法装置の開発
手法 (5/7)式 (2) : EKF 向け線形化
ne
ne
ne rrr
hhhqu
q nen
e
ne
,~1~
bnb
n
bn q
uq ~1~
gggaaa bib
bib
bib
bbb ,, ///
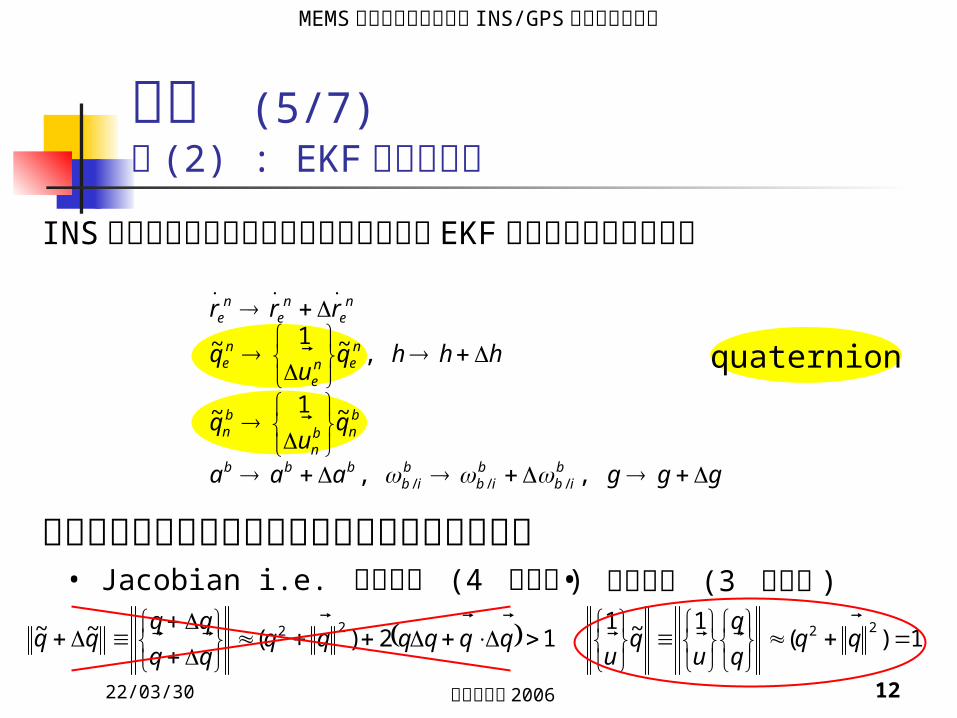
• Jacobian i.e. 足し算型 (4 状態量 ) • 掛け算型 (3 状態量 )
INS 運動方程式に以下の代入をすることで EKF 用の線形化が完了する
quaternion
12)(~~ 22
qqqqqqqq
qqqq
1)(
1~1 22
qqq
q
uq
u
大きさを維持したままのクォータニオンの線形化
23/04/20 修士輪講会 2006 13
MEMS センサを用いた小型 INS/GPS 航法装置の開発
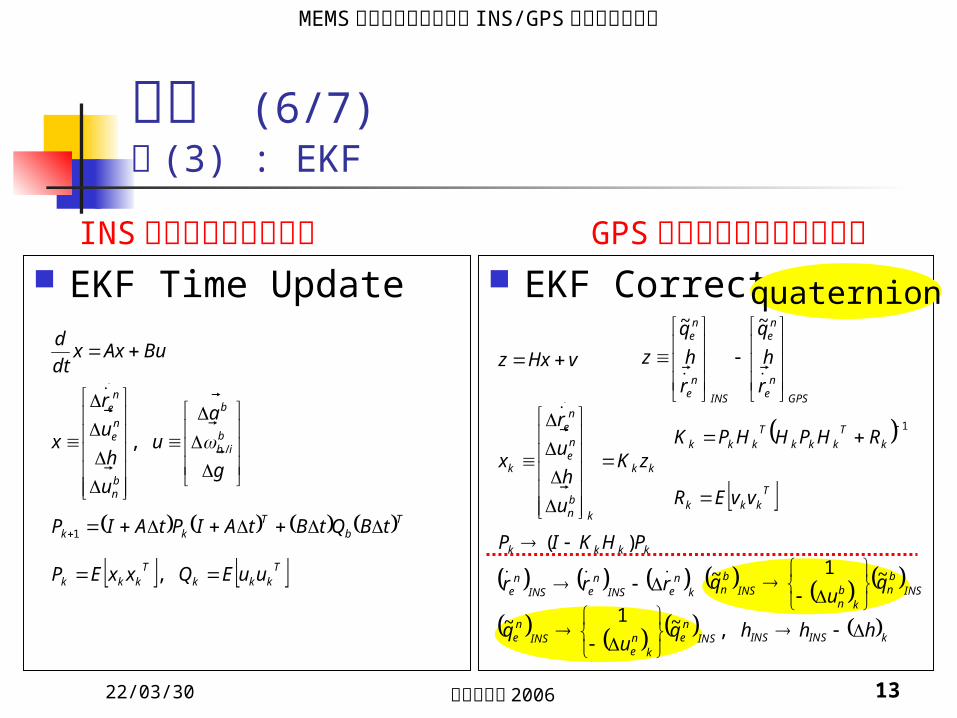
手法 (6/7)式 (3) : EKF
EKF Time Update EKF Correct
BuAxxdt
d
g
a
u
u
h
u
r
x bib
b
bn
ne
ne
/,
TbT
kk tBQtBtAIPtAIP 1
TkkkTkkk uuEQxxEP ,
GPS
ne
ne
INS
ne
ne
r
h
q
r
h
q
z
~~
vHxz
kkkk PHKIP )(
kneINS
neINS
ne rrr
kINSINSINSne
kne
INSne hhhq
uq
,~1~
INSbn
kbn
INSbn q
uq ~1~
1 k
Tkkk
Tkkk RHPHHPK
kk
k
bn
ne
ne
k zK
u
h
u
r
x
Tkkk vvER
quaternion
INS が時間更新するとき GPS から情報が得られたとき
23/04/20 修士輪講会 2006 14
MEMS センサを用いた小型 INS/GPS 航法装置の開発
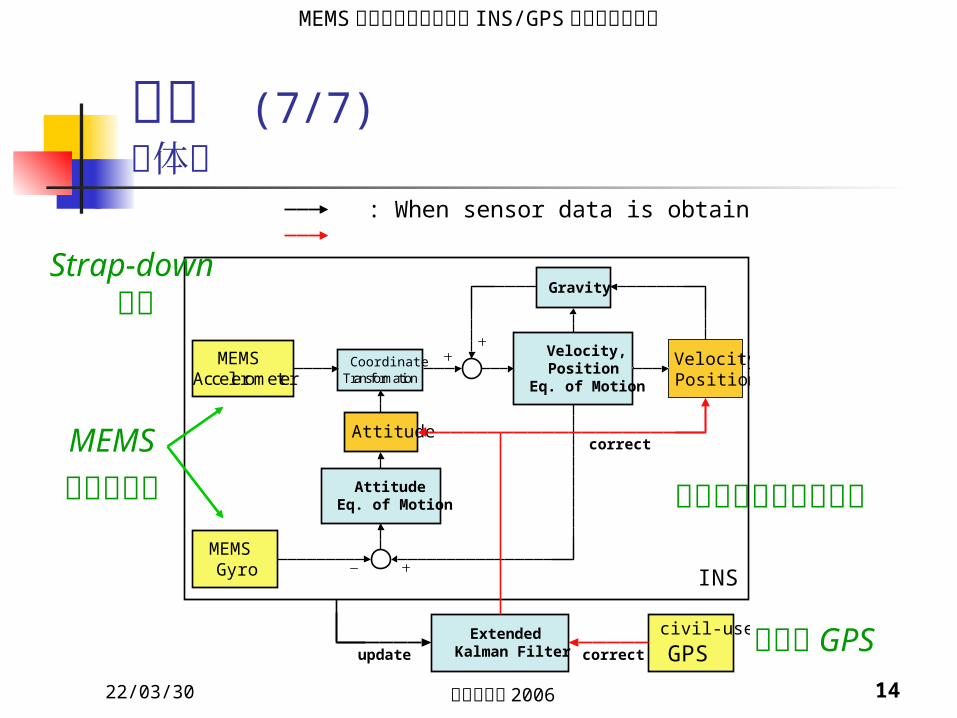
手法 (7/7)全体図
AttitudeEq. of Motion
Velocity,Position
Eq. of Motion
Gravity
CoordinateTransformation
Velocity,Position
Attitude
MEMSGyro
MEMSAccelerometer
civil-use
GPSExtended
Kalman Filterupdate correct
correct
INS
: When sensor data is obtained
クォータニオンの利用
Strap-down構成
MEMS慣性セン
サ
民生用 GPS
23/04/20 修士輪講会 2006 15
MEMS センサを用いた小型 INS/GPS 航法装置の開発
評価 (1/11)概要
プロトタイプ提案手法に基づいて作成 較正を行う
精度評価試験 プロトタイプと高精度な既存航法装置の比
較
23/04/20 修士輪講会 2006 16
MEMS センサを用いた小型 INS/GPS 航法装置の開発
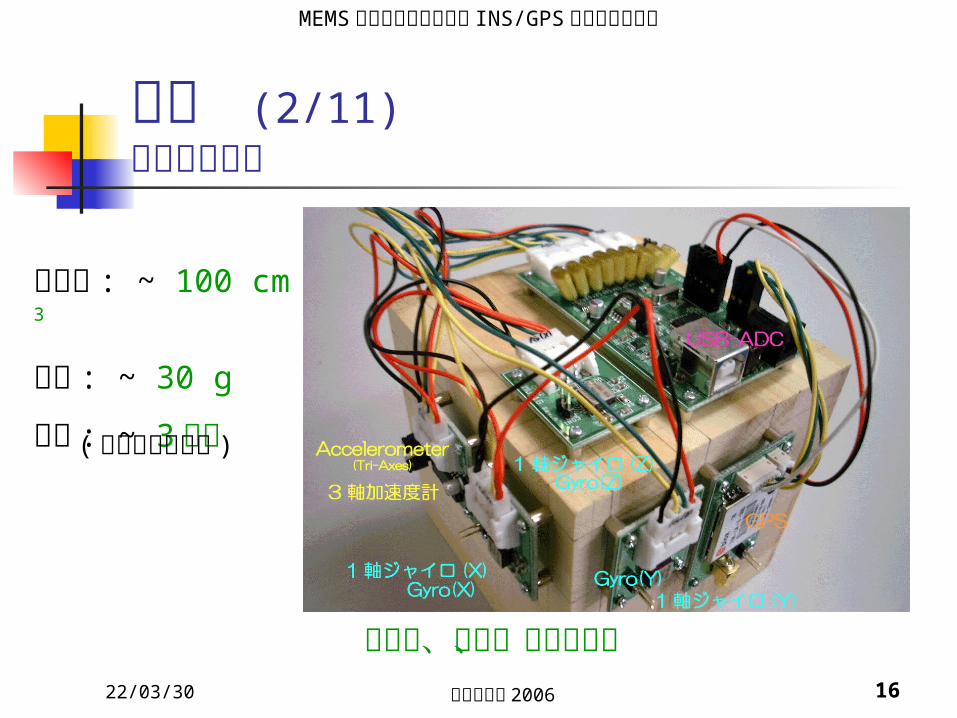
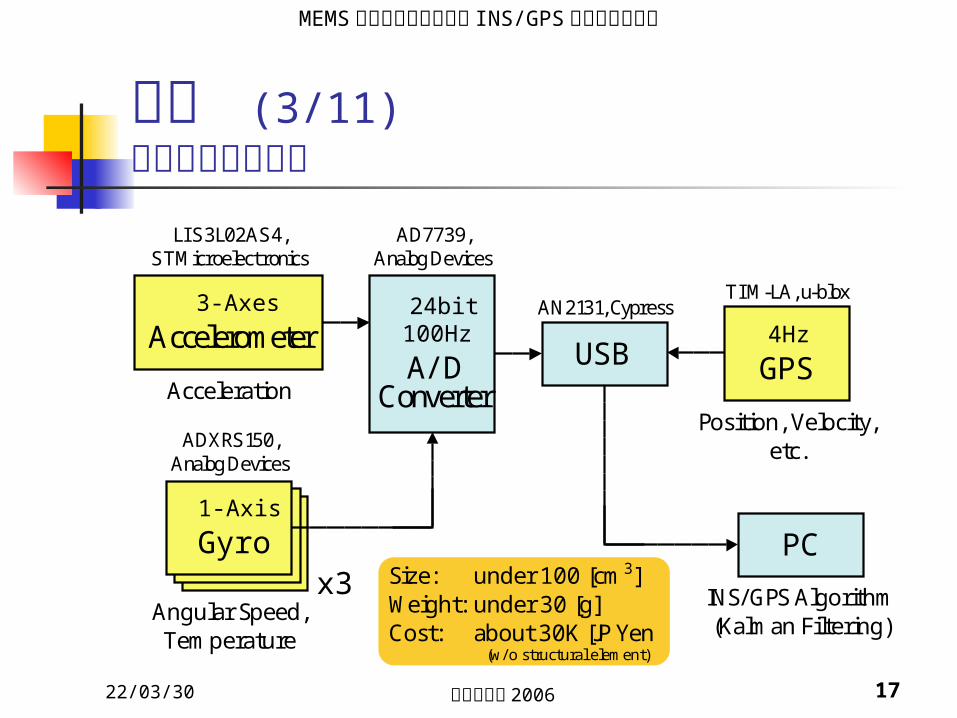
評価 (2/11)プロトタイプ
大きさ : ~ 100 cm3
重さ : ~ 30 g
費用 : ~ 3 万円( 構造部材ぬきで )
小さく、軽く、安価である
23/04/20 修士輪講会 2006 17
MEMS センサを用いた小型 INS/GPS 航法装置の開発
評価 (3/11)プロトタイプ詳細
USB
AN2131,Cypress24bit100Hz
A/DConverter
AD7739,AnalogDevices
4Hz
GPS
TI M-LA,u-blox
Position, Velocity,etc.ADXRS150,
AnalogDevices
1-Axis
Gyrox3
Angular Speed,Temperature
LI S3L02AS4,STMicroelectronics
3-Axes
Accelerometer
Acceleration
PC
INS/GPSAlgorithm(Kalman Filtering)
(w/o structural element)
Size:Weight:Cost:
under 100 [cm3]under 30 [g]about 30K [JP Yen
23/04/20 修士輪講会 2006 18
MEMS センサを用いた小型 INS/GPS 航法装置の開発
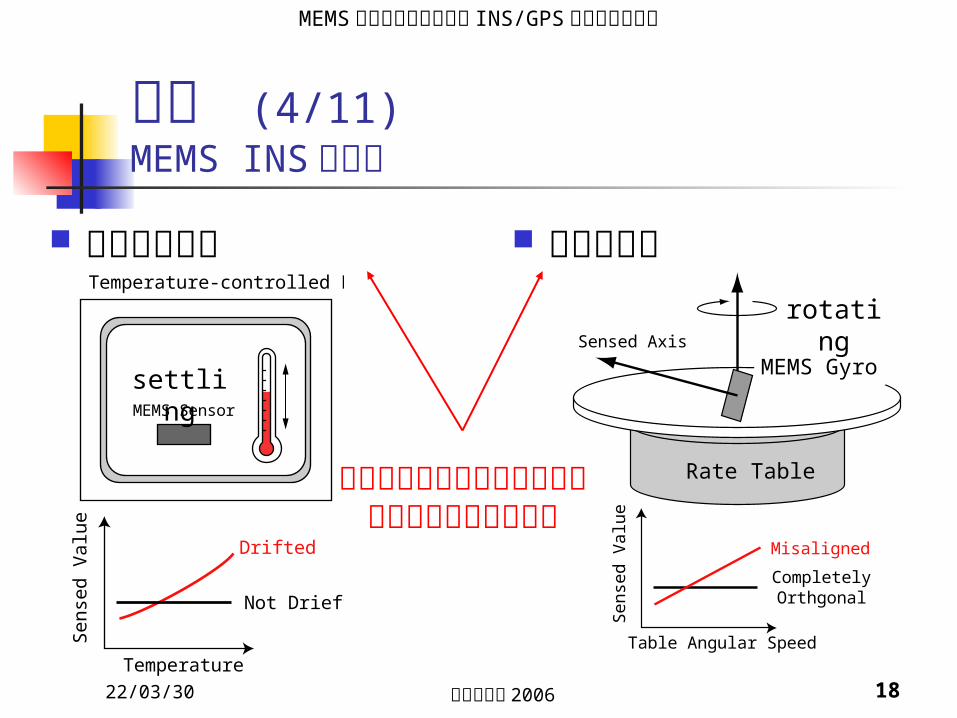
評価 (4/11)MEMS INS の較正
温度ドリフト 取付け誤差Temperature-controlled Bath
MEMS Sensor
Temperature
Sen
sed
Val
ue Drifted
Not Driefted
Rate Table
MEMS GyroSensed Axis
Table Angular Speed
Sen
sed
Val
ue
CompletelyOrthgonal
Misaligned
容易に取り除ける誤差要因の中で最も効果が大
きい
settling
rotating
23/04/20 修士輪講会 2006 19
MEMS センサを用いた小型 INS/GPS 航法装置の開発
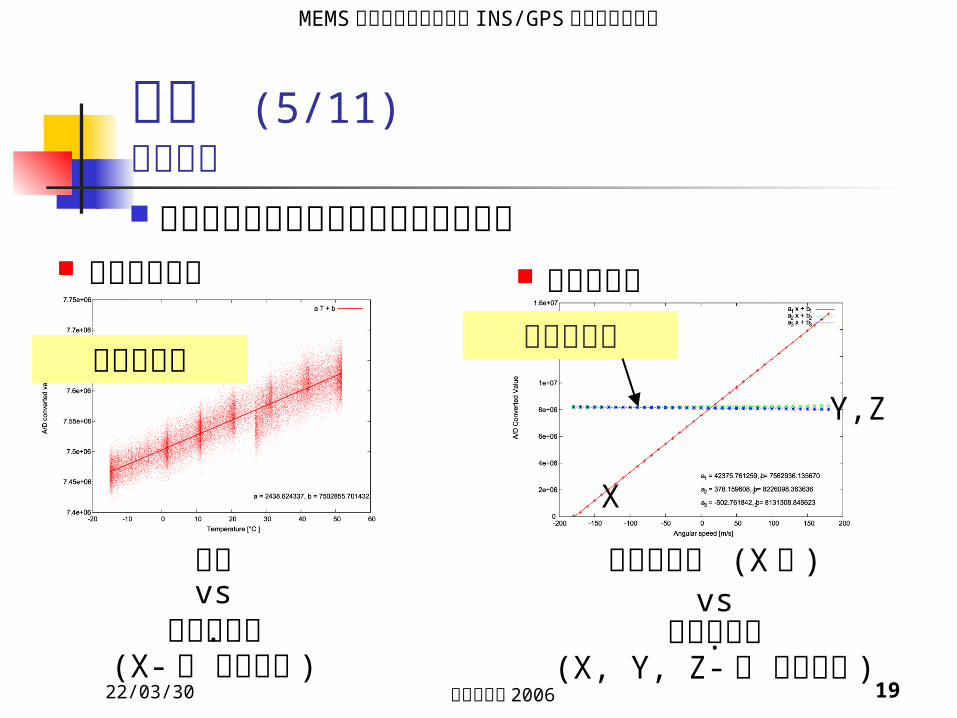
評価 (5/11)較正結果
温度ドリフト 取付け誤差
温度ドリフトと取付け誤差の測定結果
温度
傾いている傾いている
検出角速度(X, Y, Z- 軸 ジャイロ )
X
検出加速度(X- 軸 加速度計 )
真の角速度 (X 軸 )vs. vs.
Y,Z
23/04/20 修士輪講会 2006 20
MEMS センサを用いた小型 INS/GPS 航法装置の開発
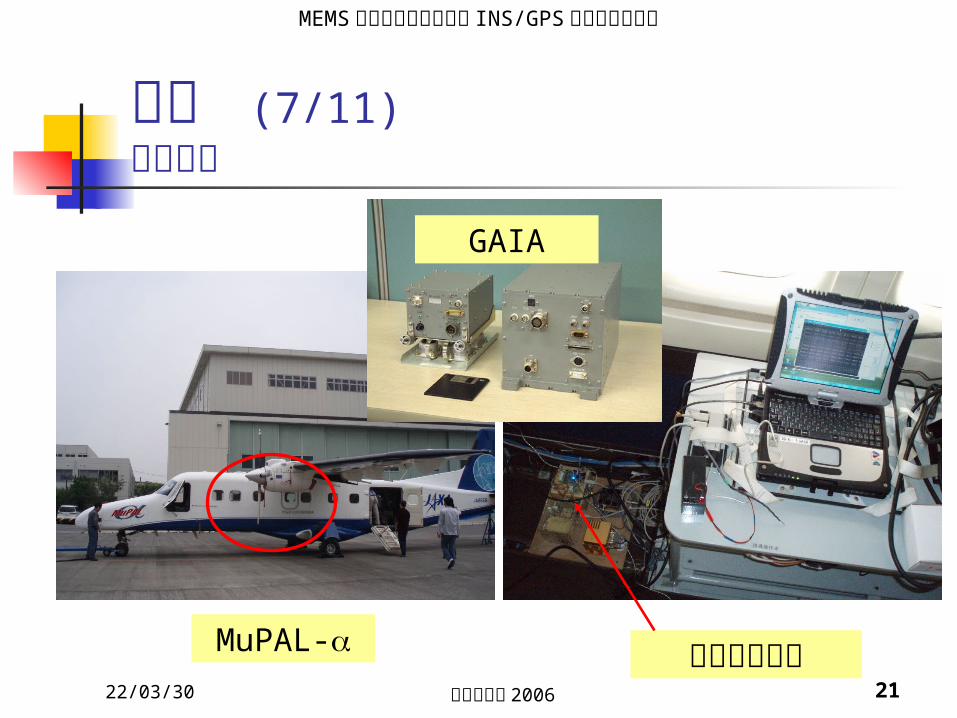
評価 (6/11)精度評価試験
GAIA との比較 (2006/06) GAIA: JAXA によって開発された超高精度
な INS/GPS 装置、誤差は絶対位置で < 1m
同 JAXA 所有の実験用航空機 MuPAL- 内内内内内内内内内 GAIA を設置
飛行し、両者の履歴を比較
23/04/20 修士輪講会 2006 21
MEMS センサを用いた小型 INS/GPS 航法装置の開発
評価 (7/11)実景風景
プロトタイプMuPAL-
GAIA
23/04/20 修士輪講会 2006 22
MEMS センサを用いた小型 INS/GPS 航法装置の開発
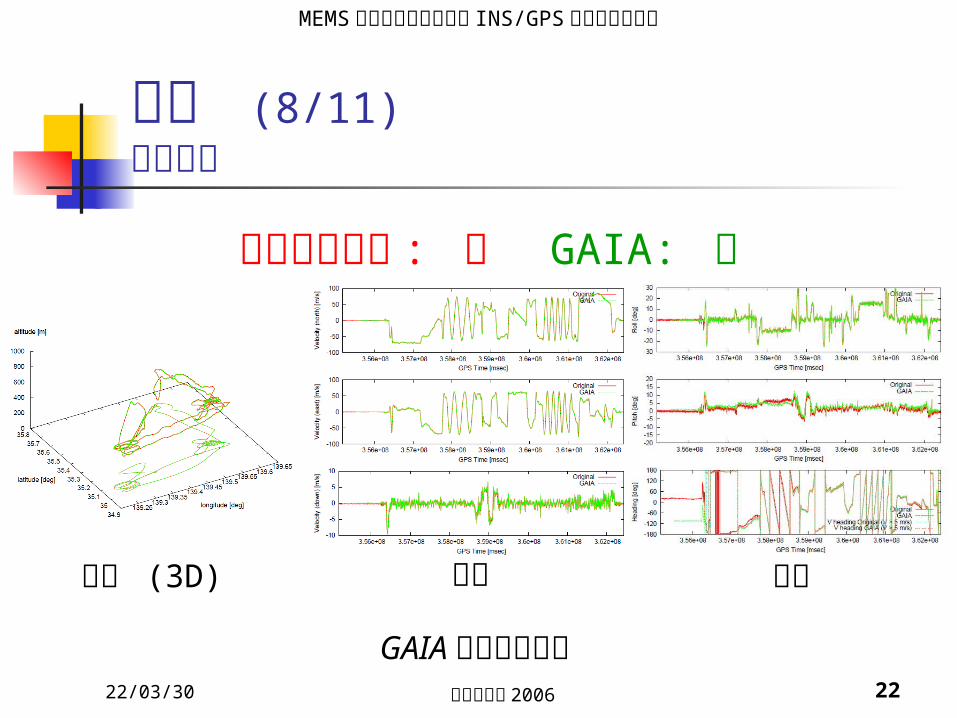
評価 (8/11)試験結果
プロトタイプ : 赤 GAIA: 緑
位置 (3D) 速度 姿勢
GAIA とほぼ等しい
23/04/20 修士輪講会 2006 23
MEMS センサを用いた小型 INS/GPS 航法装置の開発
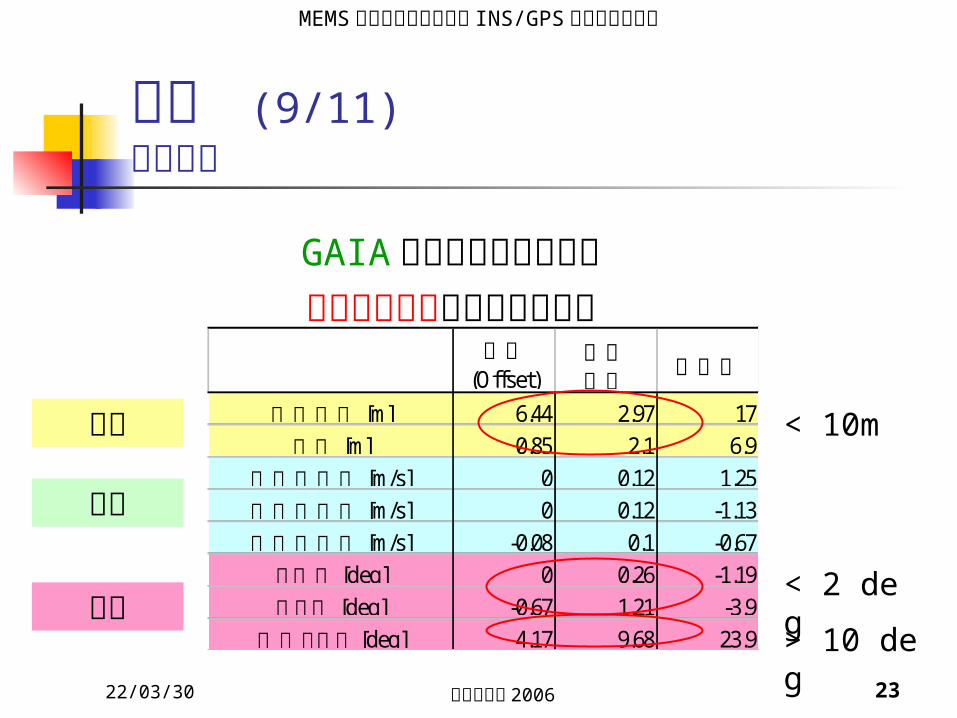
評価 (9/11)結果詳細
平均(Offset)
標準偏差 最悪値
水平距離 [m] 6.44 2.97 17
姿勢 [m] 0.85 2.1 6.9
北方向速度 [m/s] 0 0.12 1.25
東方向速度 [m/s] 0 0.12 -1.13
下方向速度 [m/s] -0.08 0.1 -0.67
ロール [deg] 0 0.26 -1.19
ピッチ [deg] -0.67 1.21 -3.9
ヘディング [deg] 4.17 9.68 23.9
GAIA を基準としたときのプロトタイプの誤差の統計量
位置
速度
姿勢
< 10m
< 2 deg
> 10 deg
23/04/20 修士輪講会 2006 24
MEMS センサを用いた小型 INS/GPS 航法装置の開発
評価 (10/11)試験結果のまとめと考察
誤差 : < 10 m( 位置 ), < 2 deg( ロール、ピッチ ) 汎用的に使用するのに十分な精度と考えられる
ヘディングが特に悪い ( 誤差 : >10 deg) 運動の周波数モードの影響が考えられる
ロールやピッチは比較的高い周波数の運動 (> 1Hz) 一方ヘディングは周波数の低い運動 (< 1 Hz)除去が難しい周波数の低いノイズ成分、例えばゼロ
点変動と重なってしまっている
23/04/20 修士輪講会 2006 25
MEMS センサを用いた小型 INS/GPS 航法装置の開発
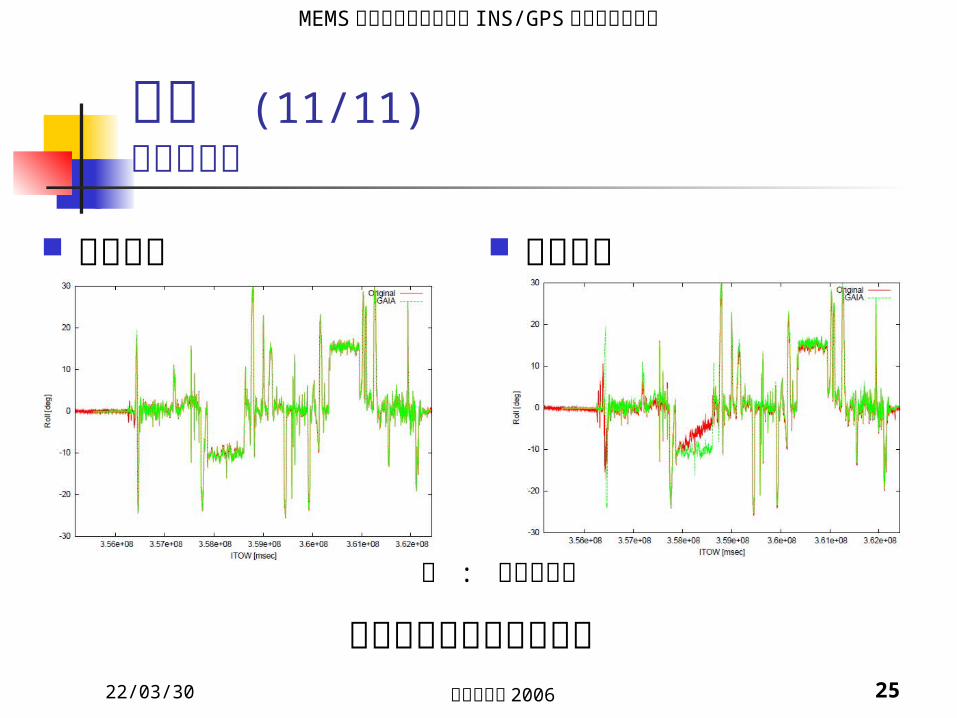
評価 (11/11)較正の効果
較正あり 較正なし
例 : ロール履歴
較正の効果を確認できる
23/04/20 修士輪講会 2006 26
MEMS センサを用いた小型 INS/GPS 航法装置の開発
結論 提案した手法とその結果
汎用的利用を目指した小さく、軽く、安価な INS/GPS を提案した
MEMS 慣性センサと民生用 GPS 受信機を構成機器とし、 Strap-down 構成をとった
アルゴリズムでは EKF と Quaternion を利用した 温度ドリフトと取付け誤差を較正し、その効果を確認した 試験結果によると、汎用利用には十分な精度を有する、誤
差は位置で 10 m以内、ロールとピッチで 2 度以内であった
23/04/20 修士輪講会 2006 27
MEMS センサを用いた小型 INS/GPS 航法装置の開発
今後の課題 低い周波数のノイズへの対応
時間 - 周波数解析 Wavelet による多重解像度解析 Wavelet によるノイズ除去
他の補強システムの利用地磁気センサ