國立臺灣師範大學機電科技學系 碩士論文 指導教授:葉 榮 木 博士...
TRANSCRIPT

國立臺灣師範大學機電科技學系 碩士論文
指導教授葉 榮 木 博士 邱 炳 樟 博士
車輛監控系統整合 GPS 和 GPRS 之研究與實現
Research and Implementation of The Vehicle Control System
Combined with GPS and GPRS
研究生陳誠鈺 撰
中華民國 95 年 7 月
國立臺灣師範大
學機電科技學系
碩士論文
車輛監控系統整合G
PS和G
PRS
之研究與實現
陳誠鈺
撰
中華民國九十五年
八月二十八日星期一年
書背
致謝
在這兩年的研究所生涯中首先我要感謝指導老師 葉榮木教授及邱炳樟
教授的用心指導在老師的指正與教導之下使得我得以順利完成此篇論文
老師在求學治學的方法與待人處事的態度也都讓我獲益良多
另外也感謝學長津超溥鑫賴科位大楷阮明輝小白在我遇
到問題時的解惑與建議讓我得以解決每次的難題最後感謝口試委員徐敬
文教授提供寶貴的意見使得本篇論文更甄完整
其次感謝人工智慧實驗室的同學宗岳柏智則謙影像處理實驗室
的同學宏洺國維家揚士軒以及學弟妹們盛均誌仁偉力智仰安
邦琪琪阿傑義霖嘉宏在我課業上與生活上的幫助
最後特別感謝我的父母親家人以及小公主對於我的支持與鼓勵還有
我在天上的爺爺(大家都很想你希望你過的好)謝謝你們
僅以此篇論文獻給所有關心我照顧我的朋友們
陳誠鈺 2006828
摘要
本文為以ARM 7為核心整合GPS receiver與GSMGPRS module之嵌入
式車輛監控系統設計本文將GPS與GPRS做結合將此ARM 7嵌入式平台
安置在車輛上並配合監控台的電子地圖如此不只可以將車輛目前所在
地的位置展現在電子地圖上
當發生緊急狀況時也能在第一時間將GPS所接收到的最新地理位置
透過GPRS上傳到網路上將資訊回傳到監控台並設計出提供多人同時
線上車輛監控和錄音等功能的監控端
經過模擬驗證吾人發現確實能夠即時的正確運作而回傳的資料也
能夠正確的顯示在電子地圖上進而達到車輛監控的目的
關鍵詞GPSGPRS嵌入式系統設計
I
Abstract
This paper discusses the implementation of the ARM 7 core as the basis
for combining GPS receiver and GSMGPRS module GPS and GPRS are
combined and this embedded system of the ARM 7 core is installed on the
vehicle Via linkage of the system through the internet the location of the
vehicle can be seen on an electronic map
In addition if a critical situation arises the most recent vehicle location
and coordinates recorded by the GPS can be quickly sent to control system
Moreover we design a server for multi-user to monitor and to tape-record
vehicles online
Simulations results showed that the system performs consistently and
correctly shows the location of the vehicle on the electronic map
KeywordsmdashGPS GPRS embedded system design
II
目 錄
摘要helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipI
AbstracthelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipII
目錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipIII
圖目錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipV
表目錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipVII
第一章 緒論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip1
11 研究動機helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip1
12 研究目的helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip1
13 系統簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip3
14 文獻回顧helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip4
15 論文組織與概觀helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip5
第二章 GPS 全球衛星定位系統分析helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip6
21 GPS發展概況helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip6
211 GPS 的緣起helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip6
212 GPS 的發展helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip7
213 GPS 的應用helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip8
22 GPS 系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
221 太空部分helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
222 控制部分helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip11
III
223 使用者部分helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
23 衛星訊號結構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip13
231 衛星信號格式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip14
24 衛星定位原理helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip16
241 GPS誤差分析helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip18
第三章 GIS 地理資訊系統發展概況helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip20
31 衛星座標系統與轉換helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21
第四章 GSMGPRS 無線行動通訊技術helliphelliphelliphelliphelliphelliphelliphelliphelliphellip25
41 GPRS 網路的發展方式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip25
第五章 車輛監控系統架構與移動系統的介紹helliphelliphelliphelliphelliphelliphellip29
51 車輛監控系統的整體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip29
52 嵌入式移動系統之硬體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip30
53 嵌入式移動系統韌體程式構成與流程helliphelliphelliphelliphelliphelliphellip33
54 即時監控系統程式介紹helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip37
第六章 操作說明與實驗結果helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip40
第七章 結論與未來展望helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip52
參考文獻helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip54
IV
圖目錄
圖 1-1 車輛監控系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip2
圖 1-2 車輛監控系統基本架構圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip3
圖 2-1 全球衛星定位系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
圖 2-2 衛星分布圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip10
圖 2-3 地球赤道面的傾角helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip10
圖 2-4 地面控制站與衛星的示意圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
圖 2-5 GPS 接收器helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip13
圖 2-6 衛星訊號結構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip14
圖 2-7 虛擬距離時間測量helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip17
圖 2-8 GPS的誤差helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip18
圖 3-1 台灣地區 TM 座標系統helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21 02
圖 3-2 WGS84 橢圓座標helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21
圖 3-3 座標轉換流程helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip22
圖 4-1 電路交換型態helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip26
圖 4-2 封包交換型態helliphelliphelliphelliphellip27
圖 4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式hellip28
圖 5-1 車輛管理系統之整體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip29
圖 5-2 嵌入式移動車載平台的架構圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip31
圖 5-3 ARNUX 7511 實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip32
圖 5-4 BENQ M22 GSMGPRS Module實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphellip32
圖 5-5 GPS Module 實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip33
圖 5-6 程式流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip37
圖 5-7 主畫面程式流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip38
圖 5-8 即時監控主畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip39
V
圖 6-1 嵌入式移動車載系統實體全圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip40
圖 6-2 Linux 主機畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
圖 6-3 終端機初使化程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
圖 6-4 回傳中繼點訊號畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
圖 6-5 回傳終點訊號定位數據畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
圖 6-6 緊急狀況發生時畫面一helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
圖 6-7 緊急狀況發生時畫面二helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
圖 6-8 緊急狀況解除畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
圖 6-9 語音通話與結束畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
圖 6-10 Power Off 跳出執行畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
圖 6-11 監控台處於Listening狀態畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
圖 6-12 車載端透過GPRS登入監控台的畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
圖 6-13 監控台行車資訊紀錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
圖 6-14 台科大的電子資訊大樓helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
圖 6-15 實際路測圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
圖 6-16 地圖顯示出發點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip48
圖 6-17 地圖顯示中繼點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip48
圖 6-18 地圖顯示中繼點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip49
圖 6-19 地圖顯示緊急狀況發生時位置之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphellip49
圖 6-20 地圖顯示終點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip50
圖 6-21 監控台多人連線測試畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip51
VI
表目錄
表4-1 GSM與GPRS的比較helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip27
VII
第一章 緒論
11 研究動機
近年來由於網際網路的蓬勃發展使得人類日常生活中常常和網際網
路有著密切的關係在此同時無線通訊的技術也是日新月異行動電話的發
展也逐漸的進入成熟的階段故許多與網際網路結合的行動通訊產品也大量
的出現
由於網際網路傳輸快速且行動通訊具有高移動性及高涵蓋性的特
性再加上 GPS 全球定位系統精準的定位所以車輛的即時監控系統現
今已愈來愈普遍許多先進國家相繼發展智慧型車輛系統在其相關系統中
又以全球衛星定位系統(Global Positioning System GPS)[1] 和地理資訊系統
(Geographic Information System GIS) 系統發展最為進步其包含了自動車
輛定位技術(Automatic Vehicle Location AVL)[11]以及地理資訊的提供等
等其中汽車導航系統導航的方式是將裝在汽車上的 GPS 接收器所接收的
衛星定位資訊傳送到車中的電腦處理再將座標及行徑路徑顯示在電子地圖
上其精確度必須考量衛星定位的誤差以及電子地圖的精準度
由於衛星是處在相當高的運行軌道上其傳送的訊號是相當的微弱因
此它不像一般通訊無線電可在室內使用或收到訊號在使用時需在室外及天
空開闊度較佳之地方才能使用否則若大部份之衛星信號被建築物金屬遮
蓋物濃密樹林等所阻擋接收器將無法獲得足夠的衛星訊息來計算出所在
位置之座標故 GPS 在定位應用上並不適合建構於一般個人行動電話上的
定位應用本文所設計的系統並非針對個人用途的定位而是針對道路上車
輛的定位應用因為道路上遮蔽物較少不至於影響衛星定位功能
12 研究目的
本文中的車輛即時監控管理系統的架構如圖 1 包含以 ARM 7 為核心的
嵌入式移動平台無線通訊技術網路監控中心即是網路與行動通訊結合
1
GPS 全球定位系統的最佳組合其功能主要在於提供駕駛者行的安全方便
快速並非只是侷限於汽車的動態定位而是廣泛的包括定位與定位後的導
引在日本與歐美等先進國家已發展多年也有實際的成果展現在世人眼前
但是在台灣還是屬於剛起步的階段
因此本系統的開發必須先從定位及導航觀念為出發點並結合地理資訊
系統(GIS)才能夠達成目標
由於美國國防部所建立的全球衛星定位系統與地理資訊系統為車輛監
控系統之主要基礎因此本論文首先就GPS 及GIS 的基本理論先加以探
討再利用GPS 衛星接收器將所需的所在地地理資訊資料擷取下來經過
座標轉換的步驟將所在地的地理位資料與電子地圖作一結合分析形成汽
車監控系統的雛形
圖 1-1 車輛監控系統架構
本論文著重於嵌入式移動系統之實現進而結合監控台的功能來達成
車輛監控之目標嵌入式移動系統包含 GPS 全球衛星定位系統GSMGPRS
無線通訊模組ARM 7TDMI CPU 核心處理器等三大部分主要利用 ARM 7
進行控制透過 GPS 衛星定位器接收來自衛星的定位訊號再加上車輛
ID 與車輛狀況的描述後經由 GSMGPRS 模組把加工後的定位資料傳至
監控台讓管理者能隨時掌握車輛的一舉一動並於必要時與之聯繫了解
2
車輛運行狀況或進行新路線的派遣若是發生緊急狀況時也能全程錄音
即時監控
此監控系統可應用在即時車輛管理及車輛監控上並可將交通運輸推展
至智慧運輸系統上使得車輛使用能夠更加有效率及安全
13 系統簡介
車輛監控系統的特色在於不僅能夠非常有效的掌握車輛位置狀況即時
下達指令至車載 Client 端上經由即時監控中心即可觀測每一台車輛的行車
狀況與緊急情況而且監控系統非常大的好處在於低廉的通信費用
透過 GPS 接收器與 GPRS(General Packet Radio Service) 的無線通訊
網路可動態取得車輛所在位置資訊即時傳遞至監控台由監控台人員執
行車輛管理監控台與路線規劃的動作將所有派遣資訊即時傳遞至執行勤務
的運送人員依據監控台指令完成遞送工作
監控台此時扮演更重要的溝通聯繫角色可以彙總即時路況資訊傳
遞綜合研判的行車動向指令協助線上動態運行的車輛獲得即時的行車指
南車輛上所裝置的嵌入式移動系統亦可依車輛運作狀況在發生緊急事件
時於監控台可獲得最即時的數據資料例如車輛故障之拖救服務交通事
故發生時之速度數據舉證等等車輛監控系統之基本架構圖如圖 1-2 所示
圖 1-2 車輛監控系統基本架構圖[10]
3
14 論文回顧
GPS 與 GIS 的發展已有相當的一段時間無論在期刊文獻論文各
方面都有許多的研究與探討我們特別針對 GPS 與 GIS 結合在汽車監控部
分加以提出做為研究的基礎
世界上已有許多國家早在多年前即實際的進行有關汽車導航系統開發
與研究像加拿大的 Calgary 大學所研發的 AVL2000 即為一個非常成功的
例子[2]~[6]
根據相關的文獻研究目前仍在繼續發展及改進的帶路系統共有 40 餘
種之多而且已從第一代的〝Where am I〞獨立系統(AutonomousStand alone
system)及第二代的〝Where are You〞快速傳遞系統(Dispatch system)和加入
了道路資訊或導引系統的第三代〝How do I get there〞發展到現在的智慧型
帶路系統[2][7]
由於在過去的文獻中如文獻[8][9]車輛的位置透過 GPS 接收完衛星
訊號之後是藉由 GSM 的簡訊發送系統來傳送 GPS 的定位資訊但是由
於很多因素如 GSM 基地台塞機塞車行動通訊模組暫時不在接收範圍內
網路傳輸品質不穩定如傳輸速度較慢或者行動電話記憶體滿了使得簡訊
遺失造成車輛的定位無法作一個即時的回報因此在車輛的監控方面將會
造成很大的缺失又因發送簡訊的時間是有時間間距的至少間距五分鐘以
上如果發生緊急狀況時就無法立即作一個很好的處置又因簡訊是以傳
送的封數來計算如此監控的花費將會非常大
由於 GPS 現今已經發展的非常成熟了所以有越來越多的導航系統
會跟 GPS 來做結合如文獻[10]~[14]以 electronic road pricing (ERP) system
電子收費系統文獻[14]來說結合 GPS 全球衛星定位系統就是一個非常創新
的想法使用 GPS 科技來做結合不只可以非常有效率划算但是它
必須透過公路上所架設固定的跨軌訊號杆來做資訊的傳送對於監控就比
4
較沒有效率了所以本文將會針對即時的監控以及車輛的防護安全作一
個完善的改進
隨著人類追求產品的服務功能與品質的提昇要求迅速以及智慧型功能
的增進相信更進步的汽車監控系統不久將會展現於世人的面前
15 論文組織及概觀
本篇論文總共分為六個章節概要分述如下
第一章說明本論文的研究動機與目的並對文中所用到的理論架構以及
介紹作一概略性的敘述
第二章針對整個 GPS 發展概況系統架構衛星訊號結構與訊號格式
定位原理GPS 誤差分析做一個詳細的介紹
第三章針對整個 GIS 地理資訊發展情況電子地圖的介紹以及衛星座
標系統轉換做一個詳細的介紹
第四章針對無線通訊 GPRS 網路的發展方式作一個詳盡的介紹
第五章介紹車輛監控系統的整體架構嵌入式移動車載系統的硬體架構設
計嵌入式移動系統韌體程式結構與流程以及即時監控程式與系
統的介紹
第六章操作說明與實驗結果討論說明實驗的程序實際道路路況測試
與實際的汽車導航操作
第七章結論與未來展望總結本論文的研究成果並說明未來應用的方向以
及其發展性
5
第二章 GPS 全球衛星定位系統分析
21 GPS 發展概況
所謂 GPS 是全球衛星定位系統(Global Position System)簡稱為美國國防
部為軍事上定位及導航目的所發展的GPS 可以極準確地提供七種定位所需
的訊息三度空間位置三度空間的速度以及時間因為它的全天候高
準確定位的特性不但成功地應用在現代軍事化設備上而且在民間用途方
面也因其實用潛力雄厚而深受矚目而 GPS 的優越性能已漸漸應用於各
方面例如船艦及飛機的導航定位可以在瞬間獲得位置及速度的數值
港灣內將導航及追蹤結合以減少碰撞的可能性增加航道安全性的管理
油井鑽勘平台的定位礦產源位置的定位飛彈上的導航航空海上陸
地之測量等等都應為有 GPS 的加入而更趨於完善的目標
211 GPS 的緣起
1958 年 12 月美國海軍武器實驗室開始建立為美國海軍軍艦導航服務
的衛星系統即「海軍導航衛星系統」(Navy Navigation Satellite System
NNSS)此系統中衛星運行的軌道大多通過地球南北極因此也稱為「子午
(Transit)衛星系統」1964 年該系統建構完成提供美國軍方使用1967
年 7 月 29 日美國政府宣佈將該系統解密並提供民間使用為衛星定位系
統運用的開始
由於該系統不受氣候條件影響自動化程度較高且具有良好的定位精
度所以解密之後立即引起各方學者的研究與應用雖然 NNSS 把導航技術
的發展推向另一個新時代但由於該系統的衛星數量較少(5-6 顆)衛星運
轉的高度較低(平均運行高度約 1000km)從地面站觀測到衛星的時間間隔
較長(平均約 15 小時)因而無法提供連續的三維導航且獲得一次導航
求解所需的時間較長無法滿足軍事方面(由其是高速飛行目標如飛機
6
導彈)導航需求
於是美國國防部為軍事定時定位與導航目的將美國海軍所開發的
TIMATION(Time And Navigation)系統和美國空軍的 621B 兩個專案予以合
併後並改名為「全球衛星定位系統」(NAVSTARGPSNavigation Satellite
Timing And RangingGlobal Positioning System直接簡稱為 GPS)希望能
以衛星導航為基礎的技術可構成主要的無線電導航系統滿足各方面科技的
應用
212 GPS 的發展
全球定位系統所使用的衛星稱為 NAVSTAR第一顆 GPS 衛星於 1978
年 2 月 22 日發射GPS 為美國繼阿波羅登月與太空梭發展計劃後的第三大
太空國防計劃此一計劃係利用 GPS 衛星發射電波訊號以提供定時定位
及導航使用其精確度極高且不受電波干擾及時間地點和天候的影響
提供使用者全天候即時的位置與時間資訊所能達到的精度較以往的導航
及測量方法都來得高
在 1993 年 12 月 8 日第 24 顆 GPS 衛星進入太空軌道運行後GPS 已達
到初步操作能力(Initial Operational CapabilityIOC)24 顆 GPS 衛星(包
含初期測試用的 Block I 與量產型 Block IIIIA)提供全世界 24 小時全天候定
位與導航資訊
美國空軍太空司令部(US Air Force Space CommandAFSC)於 1995
年 4 月 27 日宣布 GPS 已達到完整操作能力(Full Operational Capability
FOC)將 IOC 中的 Block I 衛星加以汰換24 顆衛星全部為 Block IIIIA 衛
星所組成成功地滿足軍事實務的操作
GPS 衛星佈署在離地球表面約 20200 公里上空的圓形軌道上採圓形
軌道的目的在於可增大地面可見範圍及增強全球均勻覆蓋它們平均分佈於
7
6 個軌道面上每個軌道面上各有 4 顆呈 55deg 角傾斜繞行地球運轉每
11 小時 58 分繞行地球一周不論任何時間地點同時至少有 4 顆以上的
衛星出現在我們的上空
由於 GPS 的運用技術迅速發展使得民間的應用需求與日俱增對傳
統導航方式更有革命性的影響
由於 GPS 操作簡便迅速成果精確其用途甚為廣泛除軍事用途外
更大量運用在民用航空航海車輛控制油源探測大氣地球科學等
特別是協助交通運輸環境生態森林地質等資訊之調查管理與土地測
量等目前國內外已大量在汽車上安裝 GPS 接收儀並配合電子地圖以幫
助駕駛者找到捷運及目的地同時如徒步登山及狩獵者亦可利用 GPS 提
供方位不致迷失我們可以肯定一點日後 GPS 在航電國防交通甚至
日常生活都將佔有非常重要的地位
213 GPS 的應用
一陸地應用
(一) 大地測量國家及區域控制網建立精密工程測量
(二) 測量及製圖地籍測量地理資訊系統之資料測量工程測量
(三) 交通路網圖繪製
(四) 地球動力研究與變形監測
(五) 高精度時間比對
(六) 陸上導航支援緊急車輛(警車救護車消防保全等)車輛
監控派遣(計程車危險性車輛貨櫃運輸火車等)
(七) 森林巡視員之搜救任務如登山意外事故山崩雪崩等
(八) 森林資源管理
8
二空中應用
(一) 機場精密進場著陸國內線國際線民航機及直昇機導航
(二)空中交通管制作業
(三) 航空攝影測量導引與控制空中重力及磁力測量之定位
(四)農藥噴灑
(五)休閒娛樂滑翔機飛行傘輕航機等
22 GPS 系統架構
全球衛星定位系統(GPS)只要是利用接收衛星軌道資料求解出衛星所在
位置再計算出接收器本身與衛星間的距離以求出GPS接收器的位置因
此全球定位系統是一套不受地點時間與天候影響的高精度定位系統
全球衛星定位系統架構可分為三大部份[15]太空部份( the space
segment)控制部份(the control segment)及使用者部份(the user segment)
圖 2-1 全球衛星定位系統架構[15]
221 太空部份(the space segment)
GPS 系統之太空部份針對運行的衛星本體而言目前係由 24 顆操作衛
9
星及 3 顆備用衛星所組成三顆備用衛星的功能主要在作為衛星失效時之備
用及加強衛星之幾何分佈在平時這些衛星也可用於定位故為主動預備
(active spare)方式運作
27 顆分佈於 6 個軌道面上如圖 2-2[1]衛星軌道相對地球赤道面的傾角
為 55deg如圖 2-3每個軌道面上至少分佈有 4 顆衛星軌道面與另一軌道面
上的衛星則相差 40deg衛星高度為 20200 公里每 11 小時 58 分繞行地球一
周這樣可以讓使用者在全球各地任何時刻都可以同時觀測到 4 顆以上的衛
星以利實施三度空間之定位測量
圖 2-2 衛星分布圖[1]
圖 2-3 地球赤道面的傾角[1]
10
222 控制部份(the control segment)
對於 GPS 導航定位而言GPS 衛星是一動態的已知點它是依據衛星
傳送的星曆計算而得所謂衛星星曆即是一系列描述衛星運動及其軌道的參
數每顆 GPS 衛星所傳送的星曆皆由 GPS 的地面監控系統所提供
衛星進入軌道運行之後其各種設備是否正常運作是否依預定軌道運
行等皆需要由地面設備來進行監測和控制
此外地面監控系統還有一個重要的工作就是保持各衛星處於同一時
間標準(即 GPS 時間系統)因此由地面監控系統監測各衛星的時間計
算它們的有關正數進而將導航訊息傳送給用戶以確保處於 GPS 時系
GPS 之操縱控制部分已於 1985 年 9 月完成整個控制部分包括了一個
主控站三個地面控制站五個監測站而五個監測站中的三個(Ascension
IslandDiego GarciaKwajalein)為地面控制站其擁有專有的地面天線
主控站位於美國科羅拉多州之 Springs主要功能為彙整監測站所蒐集
的資料並計算衛星的軌道與時間參數之後做軌道平滑處理並將資料傳送
至地面控制站然後在藉由監控站專用天線將資料上傳至衛星除此之外
衛星的控制與操作皆為主控站的主要任務
每個監測站均擁有一個GPS雙頻接收機標準銫原子鐘感測器及資料
處理機其座標都是經過美國國防製圖局精密測量而得每個監測站必須每
天24小時連續追蹤觀測每一顆衛星並將每一秒半之虛擬距離接收量及接收
所得之氣象資料及電離層資料聯合求解得每15分鐘一個平滑資料然後將
資料傳送至主控站主控站即整合個監視站之資料計算衛星星曆衛星時鐘
改正量及電離層改正係數等並且將所得結果彙集成導航訊息傳遞到地面天
線處再由地面天線傳送到各衛星上以更新衛星內的資料如此衛星即
可傳送新的資料給使用者接收使用如圖2-4
11
圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-
國立臺灣師範大
學機電科技學系
碩士論文
車輛監控系統整合G
PS和G
PRS
之研究與實現
陳誠鈺
撰
中華民國九十五年
八月二十八日星期一年
書背
致謝
在這兩年的研究所生涯中首先我要感謝指導老師 葉榮木教授及邱炳樟
教授的用心指導在老師的指正與教導之下使得我得以順利完成此篇論文
老師在求學治學的方法與待人處事的態度也都讓我獲益良多
另外也感謝學長津超溥鑫賴科位大楷阮明輝小白在我遇
到問題時的解惑與建議讓我得以解決每次的難題最後感謝口試委員徐敬
文教授提供寶貴的意見使得本篇論文更甄完整
其次感謝人工智慧實驗室的同學宗岳柏智則謙影像處理實驗室
的同學宏洺國維家揚士軒以及學弟妹們盛均誌仁偉力智仰安
邦琪琪阿傑義霖嘉宏在我課業上與生活上的幫助
最後特別感謝我的父母親家人以及小公主對於我的支持與鼓勵還有
我在天上的爺爺(大家都很想你希望你過的好)謝謝你們
僅以此篇論文獻給所有關心我照顧我的朋友們
陳誠鈺 2006828
摘要
本文為以ARM 7為核心整合GPS receiver與GSMGPRS module之嵌入
式車輛監控系統設計本文將GPS與GPRS做結合將此ARM 7嵌入式平台
安置在車輛上並配合監控台的電子地圖如此不只可以將車輛目前所在
地的位置展現在電子地圖上
當發生緊急狀況時也能在第一時間將GPS所接收到的最新地理位置
透過GPRS上傳到網路上將資訊回傳到監控台並設計出提供多人同時
線上車輛監控和錄音等功能的監控端
經過模擬驗證吾人發現確實能夠即時的正確運作而回傳的資料也
能夠正確的顯示在電子地圖上進而達到車輛監控的目的
關鍵詞GPSGPRS嵌入式系統設計
I
Abstract
This paper discusses the implementation of the ARM 7 core as the basis
for combining GPS receiver and GSMGPRS module GPS and GPRS are
combined and this embedded system of the ARM 7 core is installed on the
vehicle Via linkage of the system through the internet the location of the
vehicle can be seen on an electronic map
In addition if a critical situation arises the most recent vehicle location
and coordinates recorded by the GPS can be quickly sent to control system
Moreover we design a server for multi-user to monitor and to tape-record
vehicles online
Simulations results showed that the system performs consistently and
correctly shows the location of the vehicle on the electronic map
KeywordsmdashGPS GPRS embedded system design
II
目 錄
摘要helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipI
AbstracthelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipII
目錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipIII
圖目錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipV
表目錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipVII
第一章 緒論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip1
11 研究動機helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip1
12 研究目的helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip1
13 系統簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip3
14 文獻回顧helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip4
15 論文組織與概觀helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip5
第二章 GPS 全球衛星定位系統分析helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip6
21 GPS發展概況helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip6
211 GPS 的緣起helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip6
212 GPS 的發展helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip7
213 GPS 的應用helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip8
22 GPS 系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
221 太空部分helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
222 控制部分helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip11
III
223 使用者部分helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
23 衛星訊號結構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip13
231 衛星信號格式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip14
24 衛星定位原理helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip16
241 GPS誤差分析helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip18
第三章 GIS 地理資訊系統發展概況helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip20
31 衛星座標系統與轉換helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21
第四章 GSMGPRS 無線行動通訊技術helliphelliphelliphelliphelliphelliphelliphelliphelliphellip25
41 GPRS 網路的發展方式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip25
第五章 車輛監控系統架構與移動系統的介紹helliphelliphelliphelliphelliphelliphellip29
51 車輛監控系統的整體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip29
52 嵌入式移動系統之硬體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip30
53 嵌入式移動系統韌體程式構成與流程helliphelliphelliphelliphelliphelliphellip33
54 即時監控系統程式介紹helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip37
第六章 操作說明與實驗結果helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip40
第七章 結論與未來展望helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip52
參考文獻helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip54
IV
圖目錄
圖 1-1 車輛監控系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip2
圖 1-2 車輛監控系統基本架構圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip3
圖 2-1 全球衛星定位系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
圖 2-2 衛星分布圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip10
圖 2-3 地球赤道面的傾角helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip10
圖 2-4 地面控制站與衛星的示意圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
圖 2-5 GPS 接收器helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip13
圖 2-6 衛星訊號結構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip14
圖 2-7 虛擬距離時間測量helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip17
圖 2-8 GPS的誤差helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip18
圖 3-1 台灣地區 TM 座標系統helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21 02
圖 3-2 WGS84 橢圓座標helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21
圖 3-3 座標轉換流程helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip22
圖 4-1 電路交換型態helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip26
圖 4-2 封包交換型態helliphelliphelliphelliphellip27
圖 4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式hellip28
圖 5-1 車輛管理系統之整體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip29
圖 5-2 嵌入式移動車載平台的架構圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip31
圖 5-3 ARNUX 7511 實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip32
圖 5-4 BENQ M22 GSMGPRS Module實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphellip32
圖 5-5 GPS Module 實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip33
圖 5-6 程式流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip37
圖 5-7 主畫面程式流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip38
圖 5-8 即時監控主畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip39
V
圖 6-1 嵌入式移動車載系統實體全圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip40
圖 6-2 Linux 主機畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
圖 6-3 終端機初使化程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
圖 6-4 回傳中繼點訊號畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
圖 6-5 回傳終點訊號定位數據畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
圖 6-6 緊急狀況發生時畫面一helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
圖 6-7 緊急狀況發生時畫面二helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
圖 6-8 緊急狀況解除畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
圖 6-9 語音通話與結束畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
圖 6-10 Power Off 跳出執行畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
圖 6-11 監控台處於Listening狀態畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
圖 6-12 車載端透過GPRS登入監控台的畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
圖 6-13 監控台行車資訊紀錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
圖 6-14 台科大的電子資訊大樓helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
圖 6-15 實際路測圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
圖 6-16 地圖顯示出發點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip48
圖 6-17 地圖顯示中繼點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip48
圖 6-18 地圖顯示中繼點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip49
圖 6-19 地圖顯示緊急狀況發生時位置之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphellip49
圖 6-20 地圖顯示終點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip50
圖 6-21 監控台多人連線測試畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip51
VI
表目錄
表4-1 GSM與GPRS的比較helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip27
VII
第一章 緒論
11 研究動機
近年來由於網際網路的蓬勃發展使得人類日常生活中常常和網際網
路有著密切的關係在此同時無線通訊的技術也是日新月異行動電話的發
展也逐漸的進入成熟的階段故許多與網際網路結合的行動通訊產品也大量
的出現
由於網際網路傳輸快速且行動通訊具有高移動性及高涵蓋性的特
性再加上 GPS 全球定位系統精準的定位所以車輛的即時監控系統現
今已愈來愈普遍許多先進國家相繼發展智慧型車輛系統在其相關系統中
又以全球衛星定位系統(Global Positioning System GPS)[1] 和地理資訊系統
(Geographic Information System GIS) 系統發展最為進步其包含了自動車
輛定位技術(Automatic Vehicle Location AVL)[11]以及地理資訊的提供等
等其中汽車導航系統導航的方式是將裝在汽車上的 GPS 接收器所接收的
衛星定位資訊傳送到車中的電腦處理再將座標及行徑路徑顯示在電子地圖
上其精確度必須考量衛星定位的誤差以及電子地圖的精準度
由於衛星是處在相當高的運行軌道上其傳送的訊號是相當的微弱因
此它不像一般通訊無線電可在室內使用或收到訊號在使用時需在室外及天
空開闊度較佳之地方才能使用否則若大部份之衛星信號被建築物金屬遮
蓋物濃密樹林等所阻擋接收器將無法獲得足夠的衛星訊息來計算出所在
位置之座標故 GPS 在定位應用上並不適合建構於一般個人行動電話上的
定位應用本文所設計的系統並非針對個人用途的定位而是針對道路上車
輛的定位應用因為道路上遮蔽物較少不至於影響衛星定位功能
12 研究目的
本文中的車輛即時監控管理系統的架構如圖 1 包含以 ARM 7 為核心的
嵌入式移動平台無線通訊技術網路監控中心即是網路與行動通訊結合
1
GPS 全球定位系統的最佳組合其功能主要在於提供駕駛者行的安全方便
快速並非只是侷限於汽車的動態定位而是廣泛的包括定位與定位後的導
引在日本與歐美等先進國家已發展多年也有實際的成果展現在世人眼前
但是在台灣還是屬於剛起步的階段
因此本系統的開發必須先從定位及導航觀念為出發點並結合地理資訊
系統(GIS)才能夠達成目標
由於美國國防部所建立的全球衛星定位系統與地理資訊系統為車輛監
控系統之主要基礎因此本論文首先就GPS 及GIS 的基本理論先加以探
討再利用GPS 衛星接收器將所需的所在地地理資訊資料擷取下來經過
座標轉換的步驟將所在地的地理位資料與電子地圖作一結合分析形成汽
車監控系統的雛形
圖 1-1 車輛監控系統架構
本論文著重於嵌入式移動系統之實現進而結合監控台的功能來達成
車輛監控之目標嵌入式移動系統包含 GPS 全球衛星定位系統GSMGPRS
無線通訊模組ARM 7TDMI CPU 核心處理器等三大部分主要利用 ARM 7
進行控制透過 GPS 衛星定位器接收來自衛星的定位訊號再加上車輛
ID 與車輛狀況的描述後經由 GSMGPRS 模組把加工後的定位資料傳至
監控台讓管理者能隨時掌握車輛的一舉一動並於必要時與之聯繫了解
2
車輛運行狀況或進行新路線的派遣若是發生緊急狀況時也能全程錄音
即時監控
此監控系統可應用在即時車輛管理及車輛監控上並可將交通運輸推展
至智慧運輸系統上使得車輛使用能夠更加有效率及安全
13 系統簡介
車輛監控系統的特色在於不僅能夠非常有效的掌握車輛位置狀況即時
下達指令至車載 Client 端上經由即時監控中心即可觀測每一台車輛的行車
狀況與緊急情況而且監控系統非常大的好處在於低廉的通信費用
透過 GPS 接收器與 GPRS(General Packet Radio Service) 的無線通訊
網路可動態取得車輛所在位置資訊即時傳遞至監控台由監控台人員執
行車輛管理監控台與路線規劃的動作將所有派遣資訊即時傳遞至執行勤務
的運送人員依據監控台指令完成遞送工作
監控台此時扮演更重要的溝通聯繫角色可以彙總即時路況資訊傳
遞綜合研判的行車動向指令協助線上動態運行的車輛獲得即時的行車指
南車輛上所裝置的嵌入式移動系統亦可依車輛運作狀況在發生緊急事件
時於監控台可獲得最即時的數據資料例如車輛故障之拖救服務交通事
故發生時之速度數據舉證等等車輛監控系統之基本架構圖如圖 1-2 所示
圖 1-2 車輛監控系統基本架構圖[10]
3
14 論文回顧
GPS 與 GIS 的發展已有相當的一段時間無論在期刊文獻論文各
方面都有許多的研究與探討我們特別針對 GPS 與 GIS 結合在汽車監控部
分加以提出做為研究的基礎
世界上已有許多國家早在多年前即實際的進行有關汽車導航系統開發
與研究像加拿大的 Calgary 大學所研發的 AVL2000 即為一個非常成功的
例子[2]~[6]
根據相關的文獻研究目前仍在繼續發展及改進的帶路系統共有 40 餘
種之多而且已從第一代的〝Where am I〞獨立系統(AutonomousStand alone
system)及第二代的〝Where are You〞快速傳遞系統(Dispatch system)和加入
了道路資訊或導引系統的第三代〝How do I get there〞發展到現在的智慧型
帶路系統[2][7]
由於在過去的文獻中如文獻[8][9]車輛的位置透過 GPS 接收完衛星
訊號之後是藉由 GSM 的簡訊發送系統來傳送 GPS 的定位資訊但是由
於很多因素如 GSM 基地台塞機塞車行動通訊模組暫時不在接收範圍內
網路傳輸品質不穩定如傳輸速度較慢或者行動電話記憶體滿了使得簡訊
遺失造成車輛的定位無法作一個即時的回報因此在車輛的監控方面將會
造成很大的缺失又因發送簡訊的時間是有時間間距的至少間距五分鐘以
上如果發生緊急狀況時就無法立即作一個很好的處置又因簡訊是以傳
送的封數來計算如此監控的花費將會非常大
由於 GPS 現今已經發展的非常成熟了所以有越來越多的導航系統
會跟 GPS 來做結合如文獻[10]~[14]以 electronic road pricing (ERP) system
電子收費系統文獻[14]來說結合 GPS 全球衛星定位系統就是一個非常創新
的想法使用 GPS 科技來做結合不只可以非常有效率划算但是它
必須透過公路上所架設固定的跨軌訊號杆來做資訊的傳送對於監控就比
4
較沒有效率了所以本文將會針對即時的監控以及車輛的防護安全作一
個完善的改進
隨著人類追求產品的服務功能與品質的提昇要求迅速以及智慧型功能
的增進相信更進步的汽車監控系統不久將會展現於世人的面前
15 論文組織及概觀
本篇論文總共分為六個章節概要分述如下
第一章說明本論文的研究動機與目的並對文中所用到的理論架構以及
介紹作一概略性的敘述
第二章針對整個 GPS 發展概況系統架構衛星訊號結構與訊號格式
定位原理GPS 誤差分析做一個詳細的介紹
第三章針對整個 GIS 地理資訊發展情況電子地圖的介紹以及衛星座
標系統轉換做一個詳細的介紹
第四章針對無線通訊 GPRS 網路的發展方式作一個詳盡的介紹
第五章介紹車輛監控系統的整體架構嵌入式移動車載系統的硬體架構設
計嵌入式移動系統韌體程式結構與流程以及即時監控程式與系
統的介紹
第六章操作說明與實驗結果討論說明實驗的程序實際道路路況測試
與實際的汽車導航操作
第七章結論與未來展望總結本論文的研究成果並說明未來應用的方向以
及其發展性
5
第二章 GPS 全球衛星定位系統分析
21 GPS 發展概況
所謂 GPS 是全球衛星定位系統(Global Position System)簡稱為美國國防
部為軍事上定位及導航目的所發展的GPS 可以極準確地提供七種定位所需
的訊息三度空間位置三度空間的速度以及時間因為它的全天候高
準確定位的特性不但成功地應用在現代軍事化設備上而且在民間用途方
面也因其實用潛力雄厚而深受矚目而 GPS 的優越性能已漸漸應用於各
方面例如船艦及飛機的導航定位可以在瞬間獲得位置及速度的數值
港灣內將導航及追蹤結合以減少碰撞的可能性增加航道安全性的管理
油井鑽勘平台的定位礦產源位置的定位飛彈上的導航航空海上陸
地之測量等等都應為有 GPS 的加入而更趨於完善的目標
211 GPS 的緣起
1958 年 12 月美國海軍武器實驗室開始建立為美國海軍軍艦導航服務
的衛星系統即「海軍導航衛星系統」(Navy Navigation Satellite System
NNSS)此系統中衛星運行的軌道大多通過地球南北極因此也稱為「子午
(Transit)衛星系統」1964 年該系統建構完成提供美國軍方使用1967
年 7 月 29 日美國政府宣佈將該系統解密並提供民間使用為衛星定位系
統運用的開始
由於該系統不受氣候條件影響自動化程度較高且具有良好的定位精
度所以解密之後立即引起各方學者的研究與應用雖然 NNSS 把導航技術
的發展推向另一個新時代但由於該系統的衛星數量較少(5-6 顆)衛星運
轉的高度較低(平均運行高度約 1000km)從地面站觀測到衛星的時間間隔
較長(平均約 15 小時)因而無法提供連續的三維導航且獲得一次導航
求解所需的時間較長無法滿足軍事方面(由其是高速飛行目標如飛機
6
導彈)導航需求
於是美國國防部為軍事定時定位與導航目的將美國海軍所開發的
TIMATION(Time And Navigation)系統和美國空軍的 621B 兩個專案予以合
併後並改名為「全球衛星定位系統」(NAVSTARGPSNavigation Satellite
Timing And RangingGlobal Positioning System直接簡稱為 GPS)希望能
以衛星導航為基礎的技術可構成主要的無線電導航系統滿足各方面科技的
應用
212 GPS 的發展
全球定位系統所使用的衛星稱為 NAVSTAR第一顆 GPS 衛星於 1978
年 2 月 22 日發射GPS 為美國繼阿波羅登月與太空梭發展計劃後的第三大
太空國防計劃此一計劃係利用 GPS 衛星發射電波訊號以提供定時定位
及導航使用其精確度極高且不受電波干擾及時間地點和天候的影響
提供使用者全天候即時的位置與時間資訊所能達到的精度較以往的導航
及測量方法都來得高
在 1993 年 12 月 8 日第 24 顆 GPS 衛星進入太空軌道運行後GPS 已達
到初步操作能力(Initial Operational CapabilityIOC)24 顆 GPS 衛星(包
含初期測試用的 Block I 與量產型 Block IIIIA)提供全世界 24 小時全天候定
位與導航資訊
美國空軍太空司令部(US Air Force Space CommandAFSC)於 1995
年 4 月 27 日宣布 GPS 已達到完整操作能力(Full Operational Capability
FOC)將 IOC 中的 Block I 衛星加以汰換24 顆衛星全部為 Block IIIIA 衛
星所組成成功地滿足軍事實務的操作
GPS 衛星佈署在離地球表面約 20200 公里上空的圓形軌道上採圓形
軌道的目的在於可增大地面可見範圍及增強全球均勻覆蓋它們平均分佈於
7
6 個軌道面上每個軌道面上各有 4 顆呈 55deg 角傾斜繞行地球運轉每
11 小時 58 分繞行地球一周不論任何時間地點同時至少有 4 顆以上的
衛星出現在我們的上空
由於 GPS 的運用技術迅速發展使得民間的應用需求與日俱增對傳
統導航方式更有革命性的影響
由於 GPS 操作簡便迅速成果精確其用途甚為廣泛除軍事用途外
更大量運用在民用航空航海車輛控制油源探測大氣地球科學等
特別是協助交通運輸環境生態森林地質等資訊之調查管理與土地測
量等目前國內外已大量在汽車上安裝 GPS 接收儀並配合電子地圖以幫
助駕駛者找到捷運及目的地同時如徒步登山及狩獵者亦可利用 GPS 提
供方位不致迷失我們可以肯定一點日後 GPS 在航電國防交通甚至
日常生活都將佔有非常重要的地位
213 GPS 的應用
一陸地應用
(一) 大地測量國家及區域控制網建立精密工程測量
(二) 測量及製圖地籍測量地理資訊系統之資料測量工程測量
(三) 交通路網圖繪製
(四) 地球動力研究與變形監測
(五) 高精度時間比對
(六) 陸上導航支援緊急車輛(警車救護車消防保全等)車輛
監控派遣(計程車危險性車輛貨櫃運輸火車等)
(七) 森林巡視員之搜救任務如登山意外事故山崩雪崩等
(八) 森林資源管理
8
二空中應用
(一) 機場精密進場著陸國內線國際線民航機及直昇機導航
(二)空中交通管制作業
(三) 航空攝影測量導引與控制空中重力及磁力測量之定位
(四)農藥噴灑
(五)休閒娛樂滑翔機飛行傘輕航機等
22 GPS 系統架構
全球衛星定位系統(GPS)只要是利用接收衛星軌道資料求解出衛星所在
位置再計算出接收器本身與衛星間的距離以求出GPS接收器的位置因
此全球定位系統是一套不受地點時間與天候影響的高精度定位系統
全球衛星定位系統架構可分為三大部份[15]太空部份( the space
segment)控制部份(the control segment)及使用者部份(the user segment)
圖 2-1 全球衛星定位系統架構[15]
221 太空部份(the space segment)
GPS 系統之太空部份針對運行的衛星本體而言目前係由 24 顆操作衛
9
星及 3 顆備用衛星所組成三顆備用衛星的功能主要在作為衛星失效時之備
用及加強衛星之幾何分佈在平時這些衛星也可用於定位故為主動預備
(active spare)方式運作
27 顆分佈於 6 個軌道面上如圖 2-2[1]衛星軌道相對地球赤道面的傾角
為 55deg如圖 2-3每個軌道面上至少分佈有 4 顆衛星軌道面與另一軌道面
上的衛星則相差 40deg衛星高度為 20200 公里每 11 小時 58 分繞行地球一
周這樣可以讓使用者在全球各地任何時刻都可以同時觀測到 4 顆以上的衛
星以利實施三度空間之定位測量
圖 2-2 衛星分布圖[1]
圖 2-3 地球赤道面的傾角[1]
10
222 控制部份(the control segment)
對於 GPS 導航定位而言GPS 衛星是一動態的已知點它是依據衛星
傳送的星曆計算而得所謂衛星星曆即是一系列描述衛星運動及其軌道的參
數每顆 GPS 衛星所傳送的星曆皆由 GPS 的地面監控系統所提供
衛星進入軌道運行之後其各種設備是否正常運作是否依預定軌道運
行等皆需要由地面設備來進行監測和控制
此外地面監控系統還有一個重要的工作就是保持各衛星處於同一時
間標準(即 GPS 時間系統)因此由地面監控系統監測各衛星的時間計
算它們的有關正數進而將導航訊息傳送給用戶以確保處於 GPS 時系
GPS 之操縱控制部分已於 1985 年 9 月完成整個控制部分包括了一個
主控站三個地面控制站五個監測站而五個監測站中的三個(Ascension
IslandDiego GarciaKwajalein)為地面控制站其擁有專有的地面天線
主控站位於美國科羅拉多州之 Springs主要功能為彙整監測站所蒐集
的資料並計算衛星的軌道與時間參數之後做軌道平滑處理並將資料傳送
至地面控制站然後在藉由監控站專用天線將資料上傳至衛星除此之外
衛星的控制與操作皆為主控站的主要任務
每個監測站均擁有一個GPS雙頻接收機標準銫原子鐘感測器及資料
處理機其座標都是經過美國國防製圖局精密測量而得每個監測站必須每
天24小時連續追蹤觀測每一顆衛星並將每一秒半之虛擬距離接收量及接收
所得之氣象資料及電離層資料聯合求解得每15分鐘一個平滑資料然後將
資料傳送至主控站主控站即整合個監視站之資料計算衛星星曆衛星時鐘
改正量及電離層改正係數等並且將所得結果彙集成導航訊息傳遞到地面天
線處再由地面天線傳送到各衛星上以更新衛星內的資料如此衛星即
可傳送新的資料給使用者接收使用如圖2-4
11
圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

致謝
在這兩年的研究所生涯中首先我要感謝指導老師 葉榮木教授及邱炳樟
教授的用心指導在老師的指正與教導之下使得我得以順利完成此篇論文
老師在求學治學的方法與待人處事的態度也都讓我獲益良多
另外也感謝學長津超溥鑫賴科位大楷阮明輝小白在我遇
到問題時的解惑與建議讓我得以解決每次的難題最後感謝口試委員徐敬
文教授提供寶貴的意見使得本篇論文更甄完整
其次感謝人工智慧實驗室的同學宗岳柏智則謙影像處理實驗室
的同學宏洺國維家揚士軒以及學弟妹們盛均誌仁偉力智仰安
邦琪琪阿傑義霖嘉宏在我課業上與生活上的幫助
最後特別感謝我的父母親家人以及小公主對於我的支持與鼓勵還有
我在天上的爺爺(大家都很想你希望你過的好)謝謝你們
僅以此篇論文獻給所有關心我照顧我的朋友們
陳誠鈺 2006828
摘要
本文為以ARM 7為核心整合GPS receiver與GSMGPRS module之嵌入
式車輛監控系統設計本文將GPS與GPRS做結合將此ARM 7嵌入式平台
安置在車輛上並配合監控台的電子地圖如此不只可以將車輛目前所在
地的位置展現在電子地圖上
當發生緊急狀況時也能在第一時間將GPS所接收到的最新地理位置
透過GPRS上傳到網路上將資訊回傳到監控台並設計出提供多人同時
線上車輛監控和錄音等功能的監控端
經過模擬驗證吾人發現確實能夠即時的正確運作而回傳的資料也
能夠正確的顯示在電子地圖上進而達到車輛監控的目的
關鍵詞GPSGPRS嵌入式系統設計
I
Abstract
This paper discusses the implementation of the ARM 7 core as the basis
for combining GPS receiver and GSMGPRS module GPS and GPRS are
combined and this embedded system of the ARM 7 core is installed on the
vehicle Via linkage of the system through the internet the location of the
vehicle can be seen on an electronic map
In addition if a critical situation arises the most recent vehicle location
and coordinates recorded by the GPS can be quickly sent to control system
Moreover we design a server for multi-user to monitor and to tape-record
vehicles online
Simulations results showed that the system performs consistently and
correctly shows the location of the vehicle on the electronic map
KeywordsmdashGPS GPRS embedded system design
II
目 錄
摘要helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipI
AbstracthelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipII
目錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipIII
圖目錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipV
表目錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipVII
第一章 緒論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip1
11 研究動機helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip1
12 研究目的helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip1
13 系統簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip3
14 文獻回顧helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip4
15 論文組織與概觀helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip5
第二章 GPS 全球衛星定位系統分析helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip6
21 GPS發展概況helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip6
211 GPS 的緣起helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip6
212 GPS 的發展helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip7
213 GPS 的應用helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip8
22 GPS 系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
221 太空部分helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
222 控制部分helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip11
III
223 使用者部分helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
23 衛星訊號結構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip13
231 衛星信號格式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip14
24 衛星定位原理helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip16
241 GPS誤差分析helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip18
第三章 GIS 地理資訊系統發展概況helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip20
31 衛星座標系統與轉換helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21
第四章 GSMGPRS 無線行動通訊技術helliphelliphelliphelliphelliphelliphelliphelliphelliphellip25
41 GPRS 網路的發展方式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip25
第五章 車輛監控系統架構與移動系統的介紹helliphelliphelliphelliphelliphelliphellip29
51 車輛監控系統的整體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip29
52 嵌入式移動系統之硬體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip30
53 嵌入式移動系統韌體程式構成與流程helliphelliphelliphelliphelliphelliphellip33
54 即時監控系統程式介紹helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip37
第六章 操作說明與實驗結果helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip40
第七章 結論與未來展望helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip52
參考文獻helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip54
IV
圖目錄
圖 1-1 車輛監控系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip2
圖 1-2 車輛監控系統基本架構圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip3
圖 2-1 全球衛星定位系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
圖 2-2 衛星分布圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip10
圖 2-3 地球赤道面的傾角helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip10
圖 2-4 地面控制站與衛星的示意圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
圖 2-5 GPS 接收器helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip13
圖 2-6 衛星訊號結構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip14
圖 2-7 虛擬距離時間測量helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip17
圖 2-8 GPS的誤差helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip18
圖 3-1 台灣地區 TM 座標系統helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21 02
圖 3-2 WGS84 橢圓座標helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21
圖 3-3 座標轉換流程helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip22
圖 4-1 電路交換型態helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip26
圖 4-2 封包交換型態helliphelliphelliphelliphellip27
圖 4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式hellip28
圖 5-1 車輛管理系統之整體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip29
圖 5-2 嵌入式移動車載平台的架構圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip31
圖 5-3 ARNUX 7511 實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip32
圖 5-4 BENQ M22 GSMGPRS Module實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphellip32
圖 5-5 GPS Module 實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip33
圖 5-6 程式流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip37
圖 5-7 主畫面程式流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip38
圖 5-8 即時監控主畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip39
V
圖 6-1 嵌入式移動車載系統實體全圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip40
圖 6-2 Linux 主機畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
圖 6-3 終端機初使化程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
圖 6-4 回傳中繼點訊號畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
圖 6-5 回傳終點訊號定位數據畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
圖 6-6 緊急狀況發生時畫面一helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
圖 6-7 緊急狀況發生時畫面二helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
圖 6-8 緊急狀況解除畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
圖 6-9 語音通話與結束畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
圖 6-10 Power Off 跳出執行畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
圖 6-11 監控台處於Listening狀態畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
圖 6-12 車載端透過GPRS登入監控台的畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
圖 6-13 監控台行車資訊紀錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
圖 6-14 台科大的電子資訊大樓helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
圖 6-15 實際路測圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
圖 6-16 地圖顯示出發點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip48
圖 6-17 地圖顯示中繼點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip48
圖 6-18 地圖顯示中繼點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip49
圖 6-19 地圖顯示緊急狀況發生時位置之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphellip49
圖 6-20 地圖顯示終點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip50
圖 6-21 監控台多人連線測試畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip51
VI
表目錄
表4-1 GSM與GPRS的比較helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip27
VII
第一章 緒論
11 研究動機
近年來由於網際網路的蓬勃發展使得人類日常生活中常常和網際網
路有著密切的關係在此同時無線通訊的技術也是日新月異行動電話的發
展也逐漸的進入成熟的階段故許多與網際網路結合的行動通訊產品也大量
的出現
由於網際網路傳輸快速且行動通訊具有高移動性及高涵蓋性的特
性再加上 GPS 全球定位系統精準的定位所以車輛的即時監控系統現
今已愈來愈普遍許多先進國家相繼發展智慧型車輛系統在其相關系統中
又以全球衛星定位系統(Global Positioning System GPS)[1] 和地理資訊系統
(Geographic Information System GIS) 系統發展最為進步其包含了自動車
輛定位技術(Automatic Vehicle Location AVL)[11]以及地理資訊的提供等
等其中汽車導航系統導航的方式是將裝在汽車上的 GPS 接收器所接收的
衛星定位資訊傳送到車中的電腦處理再將座標及行徑路徑顯示在電子地圖
上其精確度必須考量衛星定位的誤差以及電子地圖的精準度
由於衛星是處在相當高的運行軌道上其傳送的訊號是相當的微弱因
此它不像一般通訊無線電可在室內使用或收到訊號在使用時需在室外及天
空開闊度較佳之地方才能使用否則若大部份之衛星信號被建築物金屬遮
蓋物濃密樹林等所阻擋接收器將無法獲得足夠的衛星訊息來計算出所在
位置之座標故 GPS 在定位應用上並不適合建構於一般個人行動電話上的
定位應用本文所設計的系統並非針對個人用途的定位而是針對道路上車
輛的定位應用因為道路上遮蔽物較少不至於影響衛星定位功能
12 研究目的
本文中的車輛即時監控管理系統的架構如圖 1 包含以 ARM 7 為核心的
嵌入式移動平台無線通訊技術網路監控中心即是網路與行動通訊結合
1
GPS 全球定位系統的最佳組合其功能主要在於提供駕駛者行的安全方便
快速並非只是侷限於汽車的動態定位而是廣泛的包括定位與定位後的導
引在日本與歐美等先進國家已發展多年也有實際的成果展現在世人眼前
但是在台灣還是屬於剛起步的階段
因此本系統的開發必須先從定位及導航觀念為出發點並結合地理資訊
系統(GIS)才能夠達成目標
由於美國國防部所建立的全球衛星定位系統與地理資訊系統為車輛監
控系統之主要基礎因此本論文首先就GPS 及GIS 的基本理論先加以探
討再利用GPS 衛星接收器將所需的所在地地理資訊資料擷取下來經過
座標轉換的步驟將所在地的地理位資料與電子地圖作一結合分析形成汽
車監控系統的雛形
圖 1-1 車輛監控系統架構
本論文著重於嵌入式移動系統之實現進而結合監控台的功能來達成
車輛監控之目標嵌入式移動系統包含 GPS 全球衛星定位系統GSMGPRS
無線通訊模組ARM 7TDMI CPU 核心處理器等三大部分主要利用 ARM 7
進行控制透過 GPS 衛星定位器接收來自衛星的定位訊號再加上車輛
ID 與車輛狀況的描述後經由 GSMGPRS 模組把加工後的定位資料傳至
監控台讓管理者能隨時掌握車輛的一舉一動並於必要時與之聯繫了解
2
車輛運行狀況或進行新路線的派遣若是發生緊急狀況時也能全程錄音
即時監控
此監控系統可應用在即時車輛管理及車輛監控上並可將交通運輸推展
至智慧運輸系統上使得車輛使用能夠更加有效率及安全
13 系統簡介
車輛監控系統的特色在於不僅能夠非常有效的掌握車輛位置狀況即時
下達指令至車載 Client 端上經由即時監控中心即可觀測每一台車輛的行車
狀況與緊急情況而且監控系統非常大的好處在於低廉的通信費用
透過 GPS 接收器與 GPRS(General Packet Radio Service) 的無線通訊
網路可動態取得車輛所在位置資訊即時傳遞至監控台由監控台人員執
行車輛管理監控台與路線規劃的動作將所有派遣資訊即時傳遞至執行勤務
的運送人員依據監控台指令完成遞送工作
監控台此時扮演更重要的溝通聯繫角色可以彙總即時路況資訊傳
遞綜合研判的行車動向指令協助線上動態運行的車輛獲得即時的行車指
南車輛上所裝置的嵌入式移動系統亦可依車輛運作狀況在發生緊急事件
時於監控台可獲得最即時的數據資料例如車輛故障之拖救服務交通事
故發生時之速度數據舉證等等車輛監控系統之基本架構圖如圖 1-2 所示
圖 1-2 車輛監控系統基本架構圖[10]
3
14 論文回顧
GPS 與 GIS 的發展已有相當的一段時間無論在期刊文獻論文各
方面都有許多的研究與探討我們特別針對 GPS 與 GIS 結合在汽車監控部
分加以提出做為研究的基礎
世界上已有許多國家早在多年前即實際的進行有關汽車導航系統開發
與研究像加拿大的 Calgary 大學所研發的 AVL2000 即為一個非常成功的
例子[2]~[6]
根據相關的文獻研究目前仍在繼續發展及改進的帶路系統共有 40 餘
種之多而且已從第一代的〝Where am I〞獨立系統(AutonomousStand alone
system)及第二代的〝Where are You〞快速傳遞系統(Dispatch system)和加入
了道路資訊或導引系統的第三代〝How do I get there〞發展到現在的智慧型
帶路系統[2][7]
由於在過去的文獻中如文獻[8][9]車輛的位置透過 GPS 接收完衛星
訊號之後是藉由 GSM 的簡訊發送系統來傳送 GPS 的定位資訊但是由
於很多因素如 GSM 基地台塞機塞車行動通訊模組暫時不在接收範圍內
網路傳輸品質不穩定如傳輸速度較慢或者行動電話記憶體滿了使得簡訊
遺失造成車輛的定位無法作一個即時的回報因此在車輛的監控方面將會
造成很大的缺失又因發送簡訊的時間是有時間間距的至少間距五分鐘以
上如果發生緊急狀況時就無法立即作一個很好的處置又因簡訊是以傳
送的封數來計算如此監控的花費將會非常大
由於 GPS 現今已經發展的非常成熟了所以有越來越多的導航系統
會跟 GPS 來做結合如文獻[10]~[14]以 electronic road pricing (ERP) system
電子收費系統文獻[14]來說結合 GPS 全球衛星定位系統就是一個非常創新
的想法使用 GPS 科技來做結合不只可以非常有效率划算但是它
必須透過公路上所架設固定的跨軌訊號杆來做資訊的傳送對於監控就比
4
較沒有效率了所以本文將會針對即時的監控以及車輛的防護安全作一
個完善的改進
隨著人類追求產品的服務功能與品質的提昇要求迅速以及智慧型功能
的增進相信更進步的汽車監控系統不久將會展現於世人的面前
15 論文組織及概觀
本篇論文總共分為六個章節概要分述如下
第一章說明本論文的研究動機與目的並對文中所用到的理論架構以及
介紹作一概略性的敘述
第二章針對整個 GPS 發展概況系統架構衛星訊號結構與訊號格式
定位原理GPS 誤差分析做一個詳細的介紹
第三章針對整個 GIS 地理資訊發展情況電子地圖的介紹以及衛星座
標系統轉換做一個詳細的介紹
第四章針對無線通訊 GPRS 網路的發展方式作一個詳盡的介紹
第五章介紹車輛監控系統的整體架構嵌入式移動車載系統的硬體架構設
計嵌入式移動系統韌體程式結構與流程以及即時監控程式與系
統的介紹
第六章操作說明與實驗結果討論說明實驗的程序實際道路路況測試
與實際的汽車導航操作
第七章結論與未來展望總結本論文的研究成果並說明未來應用的方向以
及其發展性
5
第二章 GPS 全球衛星定位系統分析
21 GPS 發展概況
所謂 GPS 是全球衛星定位系統(Global Position System)簡稱為美國國防
部為軍事上定位及導航目的所發展的GPS 可以極準確地提供七種定位所需
的訊息三度空間位置三度空間的速度以及時間因為它的全天候高
準確定位的特性不但成功地應用在現代軍事化設備上而且在民間用途方
面也因其實用潛力雄厚而深受矚目而 GPS 的優越性能已漸漸應用於各
方面例如船艦及飛機的導航定位可以在瞬間獲得位置及速度的數值
港灣內將導航及追蹤結合以減少碰撞的可能性增加航道安全性的管理
油井鑽勘平台的定位礦產源位置的定位飛彈上的導航航空海上陸
地之測量等等都應為有 GPS 的加入而更趨於完善的目標
211 GPS 的緣起
1958 年 12 月美國海軍武器實驗室開始建立為美國海軍軍艦導航服務
的衛星系統即「海軍導航衛星系統」(Navy Navigation Satellite System
NNSS)此系統中衛星運行的軌道大多通過地球南北極因此也稱為「子午
(Transit)衛星系統」1964 年該系統建構完成提供美國軍方使用1967
年 7 月 29 日美國政府宣佈將該系統解密並提供民間使用為衛星定位系
統運用的開始
由於該系統不受氣候條件影響自動化程度較高且具有良好的定位精
度所以解密之後立即引起各方學者的研究與應用雖然 NNSS 把導航技術
的發展推向另一個新時代但由於該系統的衛星數量較少(5-6 顆)衛星運
轉的高度較低(平均運行高度約 1000km)從地面站觀測到衛星的時間間隔
較長(平均約 15 小時)因而無法提供連續的三維導航且獲得一次導航
求解所需的時間較長無法滿足軍事方面(由其是高速飛行目標如飛機
6
導彈)導航需求
於是美國國防部為軍事定時定位與導航目的將美國海軍所開發的
TIMATION(Time And Navigation)系統和美國空軍的 621B 兩個專案予以合
併後並改名為「全球衛星定位系統」(NAVSTARGPSNavigation Satellite
Timing And RangingGlobal Positioning System直接簡稱為 GPS)希望能
以衛星導航為基礎的技術可構成主要的無線電導航系統滿足各方面科技的
應用
212 GPS 的發展
全球定位系統所使用的衛星稱為 NAVSTAR第一顆 GPS 衛星於 1978
年 2 月 22 日發射GPS 為美國繼阿波羅登月與太空梭發展計劃後的第三大
太空國防計劃此一計劃係利用 GPS 衛星發射電波訊號以提供定時定位
及導航使用其精確度極高且不受電波干擾及時間地點和天候的影響
提供使用者全天候即時的位置與時間資訊所能達到的精度較以往的導航
及測量方法都來得高
在 1993 年 12 月 8 日第 24 顆 GPS 衛星進入太空軌道運行後GPS 已達
到初步操作能力(Initial Operational CapabilityIOC)24 顆 GPS 衛星(包
含初期測試用的 Block I 與量產型 Block IIIIA)提供全世界 24 小時全天候定
位與導航資訊
美國空軍太空司令部(US Air Force Space CommandAFSC)於 1995
年 4 月 27 日宣布 GPS 已達到完整操作能力(Full Operational Capability
FOC)將 IOC 中的 Block I 衛星加以汰換24 顆衛星全部為 Block IIIIA 衛
星所組成成功地滿足軍事實務的操作
GPS 衛星佈署在離地球表面約 20200 公里上空的圓形軌道上採圓形
軌道的目的在於可增大地面可見範圍及增強全球均勻覆蓋它們平均分佈於
7
6 個軌道面上每個軌道面上各有 4 顆呈 55deg 角傾斜繞行地球運轉每
11 小時 58 分繞行地球一周不論任何時間地點同時至少有 4 顆以上的
衛星出現在我們的上空
由於 GPS 的運用技術迅速發展使得民間的應用需求與日俱增對傳
統導航方式更有革命性的影響
由於 GPS 操作簡便迅速成果精確其用途甚為廣泛除軍事用途外
更大量運用在民用航空航海車輛控制油源探測大氣地球科學等
特別是協助交通運輸環境生態森林地質等資訊之調查管理與土地測
量等目前國內外已大量在汽車上安裝 GPS 接收儀並配合電子地圖以幫
助駕駛者找到捷運及目的地同時如徒步登山及狩獵者亦可利用 GPS 提
供方位不致迷失我們可以肯定一點日後 GPS 在航電國防交通甚至
日常生活都將佔有非常重要的地位
213 GPS 的應用
一陸地應用
(一) 大地測量國家及區域控制網建立精密工程測量
(二) 測量及製圖地籍測量地理資訊系統之資料測量工程測量
(三) 交通路網圖繪製
(四) 地球動力研究與變形監測
(五) 高精度時間比對
(六) 陸上導航支援緊急車輛(警車救護車消防保全等)車輛
監控派遣(計程車危險性車輛貨櫃運輸火車等)
(七) 森林巡視員之搜救任務如登山意外事故山崩雪崩等
(八) 森林資源管理
8
二空中應用
(一) 機場精密進場著陸國內線國際線民航機及直昇機導航
(二)空中交通管制作業
(三) 航空攝影測量導引與控制空中重力及磁力測量之定位
(四)農藥噴灑
(五)休閒娛樂滑翔機飛行傘輕航機等
22 GPS 系統架構
全球衛星定位系統(GPS)只要是利用接收衛星軌道資料求解出衛星所在
位置再計算出接收器本身與衛星間的距離以求出GPS接收器的位置因
此全球定位系統是一套不受地點時間與天候影響的高精度定位系統
全球衛星定位系統架構可分為三大部份[15]太空部份( the space
segment)控制部份(the control segment)及使用者部份(the user segment)
圖 2-1 全球衛星定位系統架構[15]
221 太空部份(the space segment)
GPS 系統之太空部份針對運行的衛星本體而言目前係由 24 顆操作衛
9
星及 3 顆備用衛星所組成三顆備用衛星的功能主要在作為衛星失效時之備
用及加強衛星之幾何分佈在平時這些衛星也可用於定位故為主動預備
(active spare)方式運作
27 顆分佈於 6 個軌道面上如圖 2-2[1]衛星軌道相對地球赤道面的傾角
為 55deg如圖 2-3每個軌道面上至少分佈有 4 顆衛星軌道面與另一軌道面
上的衛星則相差 40deg衛星高度為 20200 公里每 11 小時 58 分繞行地球一
周這樣可以讓使用者在全球各地任何時刻都可以同時觀測到 4 顆以上的衛
星以利實施三度空間之定位測量
圖 2-2 衛星分布圖[1]
圖 2-3 地球赤道面的傾角[1]
10
222 控制部份(the control segment)
對於 GPS 導航定位而言GPS 衛星是一動態的已知點它是依據衛星
傳送的星曆計算而得所謂衛星星曆即是一系列描述衛星運動及其軌道的參
數每顆 GPS 衛星所傳送的星曆皆由 GPS 的地面監控系統所提供
衛星進入軌道運行之後其各種設備是否正常運作是否依預定軌道運
行等皆需要由地面設備來進行監測和控制
此外地面監控系統還有一個重要的工作就是保持各衛星處於同一時
間標準(即 GPS 時間系統)因此由地面監控系統監測各衛星的時間計
算它們的有關正數進而將導航訊息傳送給用戶以確保處於 GPS 時系
GPS 之操縱控制部分已於 1985 年 9 月完成整個控制部分包括了一個
主控站三個地面控制站五個監測站而五個監測站中的三個(Ascension
IslandDiego GarciaKwajalein)為地面控制站其擁有專有的地面天線
主控站位於美國科羅拉多州之 Springs主要功能為彙整監測站所蒐集
的資料並計算衛星的軌道與時間參數之後做軌道平滑處理並將資料傳送
至地面控制站然後在藉由監控站專用天線將資料上傳至衛星除此之外
衛星的控制與操作皆為主控站的主要任務
每個監測站均擁有一個GPS雙頻接收機標準銫原子鐘感測器及資料
處理機其座標都是經過美國國防製圖局精密測量而得每個監測站必須每
天24小時連續追蹤觀測每一顆衛星並將每一秒半之虛擬距離接收量及接收
所得之氣象資料及電離層資料聯合求解得每15分鐘一個平滑資料然後將
資料傳送至主控站主控站即整合個監視站之資料計算衛星星曆衛星時鐘
改正量及電離層改正係數等並且將所得結果彙集成導航訊息傳遞到地面天
線處再由地面天線傳送到各衛星上以更新衛星內的資料如此衛星即
可傳送新的資料給使用者接收使用如圖2-4
11
圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

摘要
本文為以ARM 7為核心整合GPS receiver與GSMGPRS module之嵌入
式車輛監控系統設計本文將GPS與GPRS做結合將此ARM 7嵌入式平台
安置在車輛上並配合監控台的電子地圖如此不只可以將車輛目前所在
地的位置展現在電子地圖上
當發生緊急狀況時也能在第一時間將GPS所接收到的最新地理位置
透過GPRS上傳到網路上將資訊回傳到監控台並設計出提供多人同時
線上車輛監控和錄音等功能的監控端
經過模擬驗證吾人發現確實能夠即時的正確運作而回傳的資料也
能夠正確的顯示在電子地圖上進而達到車輛監控的目的
關鍵詞GPSGPRS嵌入式系統設計
I
Abstract
This paper discusses the implementation of the ARM 7 core as the basis
for combining GPS receiver and GSMGPRS module GPS and GPRS are
combined and this embedded system of the ARM 7 core is installed on the
vehicle Via linkage of the system through the internet the location of the
vehicle can be seen on an electronic map
In addition if a critical situation arises the most recent vehicle location
and coordinates recorded by the GPS can be quickly sent to control system
Moreover we design a server for multi-user to monitor and to tape-record
vehicles online
Simulations results showed that the system performs consistently and
correctly shows the location of the vehicle on the electronic map
KeywordsmdashGPS GPRS embedded system design
II
目 錄
摘要helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipI
AbstracthelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipII
目錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipIII
圖目錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipV
表目錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipVII
第一章 緒論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip1
11 研究動機helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip1
12 研究目的helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip1
13 系統簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip3
14 文獻回顧helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip4
15 論文組織與概觀helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip5
第二章 GPS 全球衛星定位系統分析helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip6
21 GPS發展概況helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip6
211 GPS 的緣起helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip6
212 GPS 的發展helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip7
213 GPS 的應用helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip8
22 GPS 系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
221 太空部分helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
222 控制部分helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip11
III
223 使用者部分helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
23 衛星訊號結構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip13
231 衛星信號格式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip14
24 衛星定位原理helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip16
241 GPS誤差分析helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip18
第三章 GIS 地理資訊系統發展概況helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip20
31 衛星座標系統與轉換helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21
第四章 GSMGPRS 無線行動通訊技術helliphelliphelliphelliphelliphelliphelliphelliphelliphellip25
41 GPRS 網路的發展方式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip25
第五章 車輛監控系統架構與移動系統的介紹helliphelliphelliphelliphelliphelliphellip29
51 車輛監控系統的整體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip29
52 嵌入式移動系統之硬體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip30
53 嵌入式移動系統韌體程式構成與流程helliphelliphelliphelliphelliphelliphellip33
54 即時監控系統程式介紹helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip37
第六章 操作說明與實驗結果helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip40
第七章 結論與未來展望helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip52
參考文獻helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip54
IV
圖目錄
圖 1-1 車輛監控系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip2
圖 1-2 車輛監控系統基本架構圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip3
圖 2-1 全球衛星定位系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
圖 2-2 衛星分布圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip10
圖 2-3 地球赤道面的傾角helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip10
圖 2-4 地面控制站與衛星的示意圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
圖 2-5 GPS 接收器helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip13
圖 2-6 衛星訊號結構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip14
圖 2-7 虛擬距離時間測量helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip17
圖 2-8 GPS的誤差helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip18
圖 3-1 台灣地區 TM 座標系統helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21 02
圖 3-2 WGS84 橢圓座標helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21
圖 3-3 座標轉換流程helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip22
圖 4-1 電路交換型態helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip26
圖 4-2 封包交換型態helliphelliphelliphelliphellip27
圖 4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式hellip28
圖 5-1 車輛管理系統之整體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip29
圖 5-2 嵌入式移動車載平台的架構圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip31
圖 5-3 ARNUX 7511 實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip32
圖 5-4 BENQ M22 GSMGPRS Module實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphellip32
圖 5-5 GPS Module 實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip33
圖 5-6 程式流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip37
圖 5-7 主畫面程式流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip38
圖 5-8 即時監控主畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip39
V
圖 6-1 嵌入式移動車載系統實體全圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip40
圖 6-2 Linux 主機畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
圖 6-3 終端機初使化程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
圖 6-4 回傳中繼點訊號畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
圖 6-5 回傳終點訊號定位數據畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
圖 6-6 緊急狀況發生時畫面一helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
圖 6-7 緊急狀況發生時畫面二helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
圖 6-8 緊急狀況解除畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
圖 6-9 語音通話與結束畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
圖 6-10 Power Off 跳出執行畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
圖 6-11 監控台處於Listening狀態畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
圖 6-12 車載端透過GPRS登入監控台的畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
圖 6-13 監控台行車資訊紀錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
圖 6-14 台科大的電子資訊大樓helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
圖 6-15 實際路測圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
圖 6-16 地圖顯示出發點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip48
圖 6-17 地圖顯示中繼點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip48
圖 6-18 地圖顯示中繼點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip49
圖 6-19 地圖顯示緊急狀況發生時位置之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphellip49
圖 6-20 地圖顯示終點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip50
圖 6-21 監控台多人連線測試畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip51
VI
表目錄
表4-1 GSM與GPRS的比較helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip27
VII
第一章 緒論
11 研究動機
近年來由於網際網路的蓬勃發展使得人類日常生活中常常和網際網
路有著密切的關係在此同時無線通訊的技術也是日新月異行動電話的發
展也逐漸的進入成熟的階段故許多與網際網路結合的行動通訊產品也大量
的出現
由於網際網路傳輸快速且行動通訊具有高移動性及高涵蓋性的特
性再加上 GPS 全球定位系統精準的定位所以車輛的即時監控系統現
今已愈來愈普遍許多先進國家相繼發展智慧型車輛系統在其相關系統中
又以全球衛星定位系統(Global Positioning System GPS)[1] 和地理資訊系統
(Geographic Information System GIS) 系統發展最為進步其包含了自動車
輛定位技術(Automatic Vehicle Location AVL)[11]以及地理資訊的提供等
等其中汽車導航系統導航的方式是將裝在汽車上的 GPS 接收器所接收的
衛星定位資訊傳送到車中的電腦處理再將座標及行徑路徑顯示在電子地圖
上其精確度必須考量衛星定位的誤差以及電子地圖的精準度
由於衛星是處在相當高的運行軌道上其傳送的訊號是相當的微弱因
此它不像一般通訊無線電可在室內使用或收到訊號在使用時需在室外及天
空開闊度較佳之地方才能使用否則若大部份之衛星信號被建築物金屬遮
蓋物濃密樹林等所阻擋接收器將無法獲得足夠的衛星訊息來計算出所在
位置之座標故 GPS 在定位應用上並不適合建構於一般個人行動電話上的
定位應用本文所設計的系統並非針對個人用途的定位而是針對道路上車
輛的定位應用因為道路上遮蔽物較少不至於影響衛星定位功能
12 研究目的
本文中的車輛即時監控管理系統的架構如圖 1 包含以 ARM 7 為核心的
嵌入式移動平台無線通訊技術網路監控中心即是網路與行動通訊結合
1
GPS 全球定位系統的最佳組合其功能主要在於提供駕駛者行的安全方便
快速並非只是侷限於汽車的動態定位而是廣泛的包括定位與定位後的導
引在日本與歐美等先進國家已發展多年也有實際的成果展現在世人眼前
但是在台灣還是屬於剛起步的階段
因此本系統的開發必須先從定位及導航觀念為出發點並結合地理資訊
系統(GIS)才能夠達成目標
由於美國國防部所建立的全球衛星定位系統與地理資訊系統為車輛監
控系統之主要基礎因此本論文首先就GPS 及GIS 的基本理論先加以探
討再利用GPS 衛星接收器將所需的所在地地理資訊資料擷取下來經過
座標轉換的步驟將所在地的地理位資料與電子地圖作一結合分析形成汽
車監控系統的雛形
圖 1-1 車輛監控系統架構
本論文著重於嵌入式移動系統之實現進而結合監控台的功能來達成
車輛監控之目標嵌入式移動系統包含 GPS 全球衛星定位系統GSMGPRS
無線通訊模組ARM 7TDMI CPU 核心處理器等三大部分主要利用 ARM 7
進行控制透過 GPS 衛星定位器接收來自衛星的定位訊號再加上車輛
ID 與車輛狀況的描述後經由 GSMGPRS 模組把加工後的定位資料傳至
監控台讓管理者能隨時掌握車輛的一舉一動並於必要時與之聯繫了解
2
車輛運行狀況或進行新路線的派遣若是發生緊急狀況時也能全程錄音
即時監控
此監控系統可應用在即時車輛管理及車輛監控上並可將交通運輸推展
至智慧運輸系統上使得車輛使用能夠更加有效率及安全
13 系統簡介
車輛監控系統的特色在於不僅能夠非常有效的掌握車輛位置狀況即時
下達指令至車載 Client 端上經由即時監控中心即可觀測每一台車輛的行車
狀況與緊急情況而且監控系統非常大的好處在於低廉的通信費用
透過 GPS 接收器與 GPRS(General Packet Radio Service) 的無線通訊
網路可動態取得車輛所在位置資訊即時傳遞至監控台由監控台人員執
行車輛管理監控台與路線規劃的動作將所有派遣資訊即時傳遞至執行勤務
的運送人員依據監控台指令完成遞送工作
監控台此時扮演更重要的溝通聯繫角色可以彙總即時路況資訊傳
遞綜合研判的行車動向指令協助線上動態運行的車輛獲得即時的行車指
南車輛上所裝置的嵌入式移動系統亦可依車輛運作狀況在發生緊急事件
時於監控台可獲得最即時的數據資料例如車輛故障之拖救服務交通事
故發生時之速度數據舉證等等車輛監控系統之基本架構圖如圖 1-2 所示
圖 1-2 車輛監控系統基本架構圖[10]
3
14 論文回顧
GPS 與 GIS 的發展已有相當的一段時間無論在期刊文獻論文各
方面都有許多的研究與探討我們特別針對 GPS 與 GIS 結合在汽車監控部
分加以提出做為研究的基礎
世界上已有許多國家早在多年前即實際的進行有關汽車導航系統開發
與研究像加拿大的 Calgary 大學所研發的 AVL2000 即為一個非常成功的
例子[2]~[6]
根據相關的文獻研究目前仍在繼續發展及改進的帶路系統共有 40 餘
種之多而且已從第一代的〝Where am I〞獨立系統(AutonomousStand alone
system)及第二代的〝Where are You〞快速傳遞系統(Dispatch system)和加入
了道路資訊或導引系統的第三代〝How do I get there〞發展到現在的智慧型
帶路系統[2][7]
由於在過去的文獻中如文獻[8][9]車輛的位置透過 GPS 接收完衛星
訊號之後是藉由 GSM 的簡訊發送系統來傳送 GPS 的定位資訊但是由
於很多因素如 GSM 基地台塞機塞車行動通訊模組暫時不在接收範圍內
網路傳輸品質不穩定如傳輸速度較慢或者行動電話記憶體滿了使得簡訊
遺失造成車輛的定位無法作一個即時的回報因此在車輛的監控方面將會
造成很大的缺失又因發送簡訊的時間是有時間間距的至少間距五分鐘以
上如果發生緊急狀況時就無法立即作一個很好的處置又因簡訊是以傳
送的封數來計算如此監控的花費將會非常大
由於 GPS 現今已經發展的非常成熟了所以有越來越多的導航系統
會跟 GPS 來做結合如文獻[10]~[14]以 electronic road pricing (ERP) system
電子收費系統文獻[14]來說結合 GPS 全球衛星定位系統就是一個非常創新
的想法使用 GPS 科技來做結合不只可以非常有效率划算但是它
必須透過公路上所架設固定的跨軌訊號杆來做資訊的傳送對於監控就比
4
較沒有效率了所以本文將會針對即時的監控以及車輛的防護安全作一
個完善的改進
隨著人類追求產品的服務功能與品質的提昇要求迅速以及智慧型功能
的增進相信更進步的汽車監控系統不久將會展現於世人的面前
15 論文組織及概觀
本篇論文總共分為六個章節概要分述如下
第一章說明本論文的研究動機與目的並對文中所用到的理論架構以及
介紹作一概略性的敘述
第二章針對整個 GPS 發展概況系統架構衛星訊號結構與訊號格式
定位原理GPS 誤差分析做一個詳細的介紹
第三章針對整個 GIS 地理資訊發展情況電子地圖的介紹以及衛星座
標系統轉換做一個詳細的介紹
第四章針對無線通訊 GPRS 網路的發展方式作一個詳盡的介紹
第五章介紹車輛監控系統的整體架構嵌入式移動車載系統的硬體架構設
計嵌入式移動系統韌體程式結構與流程以及即時監控程式與系
統的介紹
第六章操作說明與實驗結果討論說明實驗的程序實際道路路況測試
與實際的汽車導航操作
第七章結論與未來展望總結本論文的研究成果並說明未來應用的方向以
及其發展性
5
第二章 GPS 全球衛星定位系統分析
21 GPS 發展概況
所謂 GPS 是全球衛星定位系統(Global Position System)簡稱為美國國防
部為軍事上定位及導航目的所發展的GPS 可以極準確地提供七種定位所需
的訊息三度空間位置三度空間的速度以及時間因為它的全天候高
準確定位的特性不但成功地應用在現代軍事化設備上而且在民間用途方
面也因其實用潛力雄厚而深受矚目而 GPS 的優越性能已漸漸應用於各
方面例如船艦及飛機的導航定位可以在瞬間獲得位置及速度的數值
港灣內將導航及追蹤結合以減少碰撞的可能性增加航道安全性的管理
油井鑽勘平台的定位礦產源位置的定位飛彈上的導航航空海上陸
地之測量等等都應為有 GPS 的加入而更趨於完善的目標
211 GPS 的緣起
1958 年 12 月美國海軍武器實驗室開始建立為美國海軍軍艦導航服務
的衛星系統即「海軍導航衛星系統」(Navy Navigation Satellite System
NNSS)此系統中衛星運行的軌道大多通過地球南北極因此也稱為「子午
(Transit)衛星系統」1964 年該系統建構完成提供美國軍方使用1967
年 7 月 29 日美國政府宣佈將該系統解密並提供民間使用為衛星定位系
統運用的開始
由於該系統不受氣候條件影響自動化程度較高且具有良好的定位精
度所以解密之後立即引起各方學者的研究與應用雖然 NNSS 把導航技術
的發展推向另一個新時代但由於該系統的衛星數量較少(5-6 顆)衛星運
轉的高度較低(平均運行高度約 1000km)從地面站觀測到衛星的時間間隔
較長(平均約 15 小時)因而無法提供連續的三維導航且獲得一次導航
求解所需的時間較長無法滿足軍事方面(由其是高速飛行目標如飛機
6
導彈)導航需求
於是美國國防部為軍事定時定位與導航目的將美國海軍所開發的
TIMATION(Time And Navigation)系統和美國空軍的 621B 兩個專案予以合
併後並改名為「全球衛星定位系統」(NAVSTARGPSNavigation Satellite
Timing And RangingGlobal Positioning System直接簡稱為 GPS)希望能
以衛星導航為基礎的技術可構成主要的無線電導航系統滿足各方面科技的
應用
212 GPS 的發展
全球定位系統所使用的衛星稱為 NAVSTAR第一顆 GPS 衛星於 1978
年 2 月 22 日發射GPS 為美國繼阿波羅登月與太空梭發展計劃後的第三大
太空國防計劃此一計劃係利用 GPS 衛星發射電波訊號以提供定時定位
及導航使用其精確度極高且不受電波干擾及時間地點和天候的影響
提供使用者全天候即時的位置與時間資訊所能達到的精度較以往的導航
及測量方法都來得高
在 1993 年 12 月 8 日第 24 顆 GPS 衛星進入太空軌道運行後GPS 已達
到初步操作能力(Initial Operational CapabilityIOC)24 顆 GPS 衛星(包
含初期測試用的 Block I 與量產型 Block IIIIA)提供全世界 24 小時全天候定
位與導航資訊
美國空軍太空司令部(US Air Force Space CommandAFSC)於 1995
年 4 月 27 日宣布 GPS 已達到完整操作能力(Full Operational Capability
FOC)將 IOC 中的 Block I 衛星加以汰換24 顆衛星全部為 Block IIIIA 衛
星所組成成功地滿足軍事實務的操作
GPS 衛星佈署在離地球表面約 20200 公里上空的圓形軌道上採圓形
軌道的目的在於可增大地面可見範圍及增強全球均勻覆蓋它們平均分佈於
7
6 個軌道面上每個軌道面上各有 4 顆呈 55deg 角傾斜繞行地球運轉每
11 小時 58 分繞行地球一周不論任何時間地點同時至少有 4 顆以上的
衛星出現在我們的上空
由於 GPS 的運用技術迅速發展使得民間的應用需求與日俱增對傳
統導航方式更有革命性的影響
由於 GPS 操作簡便迅速成果精確其用途甚為廣泛除軍事用途外
更大量運用在民用航空航海車輛控制油源探測大氣地球科學等
特別是協助交通運輸環境生態森林地質等資訊之調查管理與土地測
量等目前國內外已大量在汽車上安裝 GPS 接收儀並配合電子地圖以幫
助駕駛者找到捷運及目的地同時如徒步登山及狩獵者亦可利用 GPS 提
供方位不致迷失我們可以肯定一點日後 GPS 在航電國防交通甚至
日常生活都將佔有非常重要的地位
213 GPS 的應用
一陸地應用
(一) 大地測量國家及區域控制網建立精密工程測量
(二) 測量及製圖地籍測量地理資訊系統之資料測量工程測量
(三) 交通路網圖繪製
(四) 地球動力研究與變形監測
(五) 高精度時間比對
(六) 陸上導航支援緊急車輛(警車救護車消防保全等)車輛
監控派遣(計程車危險性車輛貨櫃運輸火車等)
(七) 森林巡視員之搜救任務如登山意外事故山崩雪崩等
(八) 森林資源管理
8
二空中應用
(一) 機場精密進場著陸國內線國際線民航機及直昇機導航
(二)空中交通管制作業
(三) 航空攝影測量導引與控制空中重力及磁力測量之定位
(四)農藥噴灑
(五)休閒娛樂滑翔機飛行傘輕航機等
22 GPS 系統架構
全球衛星定位系統(GPS)只要是利用接收衛星軌道資料求解出衛星所在
位置再計算出接收器本身與衛星間的距離以求出GPS接收器的位置因
此全球定位系統是一套不受地點時間與天候影響的高精度定位系統
全球衛星定位系統架構可分為三大部份[15]太空部份( the space
segment)控制部份(the control segment)及使用者部份(the user segment)
圖 2-1 全球衛星定位系統架構[15]
221 太空部份(the space segment)
GPS 系統之太空部份針對運行的衛星本體而言目前係由 24 顆操作衛
9
星及 3 顆備用衛星所組成三顆備用衛星的功能主要在作為衛星失效時之備
用及加強衛星之幾何分佈在平時這些衛星也可用於定位故為主動預備
(active spare)方式運作
27 顆分佈於 6 個軌道面上如圖 2-2[1]衛星軌道相對地球赤道面的傾角
為 55deg如圖 2-3每個軌道面上至少分佈有 4 顆衛星軌道面與另一軌道面
上的衛星則相差 40deg衛星高度為 20200 公里每 11 小時 58 分繞行地球一
周這樣可以讓使用者在全球各地任何時刻都可以同時觀測到 4 顆以上的衛
星以利實施三度空間之定位測量
圖 2-2 衛星分布圖[1]
圖 2-3 地球赤道面的傾角[1]
10
222 控制部份(the control segment)
對於 GPS 導航定位而言GPS 衛星是一動態的已知點它是依據衛星
傳送的星曆計算而得所謂衛星星曆即是一系列描述衛星運動及其軌道的參
數每顆 GPS 衛星所傳送的星曆皆由 GPS 的地面監控系統所提供
衛星進入軌道運行之後其各種設備是否正常運作是否依預定軌道運
行等皆需要由地面設備來進行監測和控制
此外地面監控系統還有一個重要的工作就是保持各衛星處於同一時
間標準(即 GPS 時間系統)因此由地面監控系統監測各衛星的時間計
算它們的有關正數進而將導航訊息傳送給用戶以確保處於 GPS 時系
GPS 之操縱控制部分已於 1985 年 9 月完成整個控制部分包括了一個
主控站三個地面控制站五個監測站而五個監測站中的三個(Ascension
IslandDiego GarciaKwajalein)為地面控制站其擁有專有的地面天線
主控站位於美國科羅拉多州之 Springs主要功能為彙整監測站所蒐集
的資料並計算衛星的軌道與時間參數之後做軌道平滑處理並將資料傳送
至地面控制站然後在藉由監控站專用天線將資料上傳至衛星除此之外
衛星的控制與操作皆為主控站的主要任務
每個監測站均擁有一個GPS雙頻接收機標準銫原子鐘感測器及資料
處理機其座標都是經過美國國防製圖局精密測量而得每個監測站必須每
天24小時連續追蹤觀測每一顆衛星並將每一秒半之虛擬距離接收量及接收
所得之氣象資料及電離層資料聯合求解得每15分鐘一個平滑資料然後將
資料傳送至主控站主控站即整合個監視站之資料計算衛星星曆衛星時鐘
改正量及電離層改正係數等並且將所得結果彙集成導航訊息傳遞到地面天
線處再由地面天線傳送到各衛星上以更新衛星內的資料如此衛星即
可傳送新的資料給使用者接收使用如圖2-4
11
圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

Abstract
This paper discusses the implementation of the ARM 7 core as the basis
for combining GPS receiver and GSMGPRS module GPS and GPRS are
combined and this embedded system of the ARM 7 core is installed on the
vehicle Via linkage of the system through the internet the location of the
vehicle can be seen on an electronic map
In addition if a critical situation arises the most recent vehicle location
and coordinates recorded by the GPS can be quickly sent to control system
Moreover we design a server for multi-user to monitor and to tape-record
vehicles online
Simulations results showed that the system performs consistently and
correctly shows the location of the vehicle on the electronic map
KeywordsmdashGPS GPRS embedded system design
II
目 錄
摘要helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipI
AbstracthelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipII
目錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipIII
圖目錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipV
表目錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipVII
第一章 緒論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip1
11 研究動機helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip1
12 研究目的helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip1
13 系統簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip3
14 文獻回顧helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip4
15 論文組織與概觀helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip5
第二章 GPS 全球衛星定位系統分析helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip6
21 GPS發展概況helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip6
211 GPS 的緣起helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip6
212 GPS 的發展helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip7
213 GPS 的應用helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip8
22 GPS 系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
221 太空部分helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
222 控制部分helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip11
III
223 使用者部分helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
23 衛星訊號結構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip13
231 衛星信號格式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip14
24 衛星定位原理helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip16
241 GPS誤差分析helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip18
第三章 GIS 地理資訊系統發展概況helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip20
31 衛星座標系統與轉換helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21
第四章 GSMGPRS 無線行動通訊技術helliphelliphelliphelliphelliphelliphelliphelliphelliphellip25
41 GPRS 網路的發展方式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip25
第五章 車輛監控系統架構與移動系統的介紹helliphelliphelliphelliphelliphelliphellip29
51 車輛監控系統的整體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip29
52 嵌入式移動系統之硬體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip30
53 嵌入式移動系統韌體程式構成與流程helliphelliphelliphelliphelliphelliphellip33
54 即時監控系統程式介紹helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip37
第六章 操作說明與實驗結果helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip40
第七章 結論與未來展望helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip52
參考文獻helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip54
IV
圖目錄
圖 1-1 車輛監控系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip2
圖 1-2 車輛監控系統基本架構圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip3
圖 2-1 全球衛星定位系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
圖 2-2 衛星分布圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip10
圖 2-3 地球赤道面的傾角helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip10
圖 2-4 地面控制站與衛星的示意圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
圖 2-5 GPS 接收器helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip13
圖 2-6 衛星訊號結構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip14
圖 2-7 虛擬距離時間測量helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip17
圖 2-8 GPS的誤差helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip18
圖 3-1 台灣地區 TM 座標系統helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21 02
圖 3-2 WGS84 橢圓座標helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21
圖 3-3 座標轉換流程helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip22
圖 4-1 電路交換型態helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip26
圖 4-2 封包交換型態helliphelliphelliphelliphellip27
圖 4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式hellip28
圖 5-1 車輛管理系統之整體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip29
圖 5-2 嵌入式移動車載平台的架構圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip31
圖 5-3 ARNUX 7511 實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip32
圖 5-4 BENQ M22 GSMGPRS Module實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphellip32
圖 5-5 GPS Module 實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip33
圖 5-6 程式流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip37
圖 5-7 主畫面程式流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip38
圖 5-8 即時監控主畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip39
V
圖 6-1 嵌入式移動車載系統實體全圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip40
圖 6-2 Linux 主機畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
圖 6-3 終端機初使化程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
圖 6-4 回傳中繼點訊號畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
圖 6-5 回傳終點訊號定位數據畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
圖 6-6 緊急狀況發生時畫面一helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
圖 6-7 緊急狀況發生時畫面二helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
圖 6-8 緊急狀況解除畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
圖 6-9 語音通話與結束畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
圖 6-10 Power Off 跳出執行畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
圖 6-11 監控台處於Listening狀態畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
圖 6-12 車載端透過GPRS登入監控台的畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
圖 6-13 監控台行車資訊紀錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
圖 6-14 台科大的電子資訊大樓helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
圖 6-15 實際路測圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
圖 6-16 地圖顯示出發點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip48
圖 6-17 地圖顯示中繼點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip48
圖 6-18 地圖顯示中繼點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip49
圖 6-19 地圖顯示緊急狀況發生時位置之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphellip49
圖 6-20 地圖顯示終點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip50
圖 6-21 監控台多人連線測試畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip51
VI
表目錄
表4-1 GSM與GPRS的比較helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip27
VII
第一章 緒論
11 研究動機
近年來由於網際網路的蓬勃發展使得人類日常生活中常常和網際網
路有著密切的關係在此同時無線通訊的技術也是日新月異行動電話的發
展也逐漸的進入成熟的階段故許多與網際網路結合的行動通訊產品也大量
的出現
由於網際網路傳輸快速且行動通訊具有高移動性及高涵蓋性的特
性再加上 GPS 全球定位系統精準的定位所以車輛的即時監控系統現
今已愈來愈普遍許多先進國家相繼發展智慧型車輛系統在其相關系統中
又以全球衛星定位系統(Global Positioning System GPS)[1] 和地理資訊系統
(Geographic Information System GIS) 系統發展最為進步其包含了自動車
輛定位技術(Automatic Vehicle Location AVL)[11]以及地理資訊的提供等
等其中汽車導航系統導航的方式是將裝在汽車上的 GPS 接收器所接收的
衛星定位資訊傳送到車中的電腦處理再將座標及行徑路徑顯示在電子地圖
上其精確度必須考量衛星定位的誤差以及電子地圖的精準度
由於衛星是處在相當高的運行軌道上其傳送的訊號是相當的微弱因
此它不像一般通訊無線電可在室內使用或收到訊號在使用時需在室外及天
空開闊度較佳之地方才能使用否則若大部份之衛星信號被建築物金屬遮
蓋物濃密樹林等所阻擋接收器將無法獲得足夠的衛星訊息來計算出所在
位置之座標故 GPS 在定位應用上並不適合建構於一般個人行動電話上的
定位應用本文所設計的系統並非針對個人用途的定位而是針對道路上車
輛的定位應用因為道路上遮蔽物較少不至於影響衛星定位功能
12 研究目的
本文中的車輛即時監控管理系統的架構如圖 1 包含以 ARM 7 為核心的
嵌入式移動平台無線通訊技術網路監控中心即是網路與行動通訊結合
1
GPS 全球定位系統的最佳組合其功能主要在於提供駕駛者行的安全方便
快速並非只是侷限於汽車的動態定位而是廣泛的包括定位與定位後的導
引在日本與歐美等先進國家已發展多年也有實際的成果展現在世人眼前
但是在台灣還是屬於剛起步的階段
因此本系統的開發必須先從定位及導航觀念為出發點並結合地理資訊
系統(GIS)才能夠達成目標
由於美國國防部所建立的全球衛星定位系統與地理資訊系統為車輛監
控系統之主要基礎因此本論文首先就GPS 及GIS 的基本理論先加以探
討再利用GPS 衛星接收器將所需的所在地地理資訊資料擷取下來經過
座標轉換的步驟將所在地的地理位資料與電子地圖作一結合分析形成汽
車監控系統的雛形
圖 1-1 車輛監控系統架構
本論文著重於嵌入式移動系統之實現進而結合監控台的功能來達成
車輛監控之目標嵌入式移動系統包含 GPS 全球衛星定位系統GSMGPRS
無線通訊模組ARM 7TDMI CPU 核心處理器等三大部分主要利用 ARM 7
進行控制透過 GPS 衛星定位器接收來自衛星的定位訊號再加上車輛
ID 與車輛狀況的描述後經由 GSMGPRS 模組把加工後的定位資料傳至
監控台讓管理者能隨時掌握車輛的一舉一動並於必要時與之聯繫了解
2
車輛運行狀況或進行新路線的派遣若是發生緊急狀況時也能全程錄音
即時監控
此監控系統可應用在即時車輛管理及車輛監控上並可將交通運輸推展
至智慧運輸系統上使得車輛使用能夠更加有效率及安全
13 系統簡介
車輛監控系統的特色在於不僅能夠非常有效的掌握車輛位置狀況即時
下達指令至車載 Client 端上經由即時監控中心即可觀測每一台車輛的行車
狀況與緊急情況而且監控系統非常大的好處在於低廉的通信費用
透過 GPS 接收器與 GPRS(General Packet Radio Service) 的無線通訊
網路可動態取得車輛所在位置資訊即時傳遞至監控台由監控台人員執
行車輛管理監控台與路線規劃的動作將所有派遣資訊即時傳遞至執行勤務
的運送人員依據監控台指令完成遞送工作
監控台此時扮演更重要的溝通聯繫角色可以彙總即時路況資訊傳
遞綜合研判的行車動向指令協助線上動態運行的車輛獲得即時的行車指
南車輛上所裝置的嵌入式移動系統亦可依車輛運作狀況在發生緊急事件
時於監控台可獲得最即時的數據資料例如車輛故障之拖救服務交通事
故發生時之速度數據舉證等等車輛監控系統之基本架構圖如圖 1-2 所示
圖 1-2 車輛監控系統基本架構圖[10]
3
14 論文回顧
GPS 與 GIS 的發展已有相當的一段時間無論在期刊文獻論文各
方面都有許多的研究與探討我們特別針對 GPS 與 GIS 結合在汽車監控部
分加以提出做為研究的基礎
世界上已有許多國家早在多年前即實際的進行有關汽車導航系統開發
與研究像加拿大的 Calgary 大學所研發的 AVL2000 即為一個非常成功的
例子[2]~[6]
根據相關的文獻研究目前仍在繼續發展及改進的帶路系統共有 40 餘
種之多而且已從第一代的〝Where am I〞獨立系統(AutonomousStand alone
system)及第二代的〝Where are You〞快速傳遞系統(Dispatch system)和加入
了道路資訊或導引系統的第三代〝How do I get there〞發展到現在的智慧型
帶路系統[2][7]
由於在過去的文獻中如文獻[8][9]車輛的位置透過 GPS 接收完衛星
訊號之後是藉由 GSM 的簡訊發送系統來傳送 GPS 的定位資訊但是由
於很多因素如 GSM 基地台塞機塞車行動通訊模組暫時不在接收範圍內
網路傳輸品質不穩定如傳輸速度較慢或者行動電話記憶體滿了使得簡訊
遺失造成車輛的定位無法作一個即時的回報因此在車輛的監控方面將會
造成很大的缺失又因發送簡訊的時間是有時間間距的至少間距五分鐘以
上如果發生緊急狀況時就無法立即作一個很好的處置又因簡訊是以傳
送的封數來計算如此監控的花費將會非常大
由於 GPS 現今已經發展的非常成熟了所以有越來越多的導航系統
會跟 GPS 來做結合如文獻[10]~[14]以 electronic road pricing (ERP) system
電子收費系統文獻[14]來說結合 GPS 全球衛星定位系統就是一個非常創新
的想法使用 GPS 科技來做結合不只可以非常有效率划算但是它
必須透過公路上所架設固定的跨軌訊號杆來做資訊的傳送對於監控就比
4
較沒有效率了所以本文將會針對即時的監控以及車輛的防護安全作一
個完善的改進
隨著人類追求產品的服務功能與品質的提昇要求迅速以及智慧型功能
的增進相信更進步的汽車監控系統不久將會展現於世人的面前
15 論文組織及概觀
本篇論文總共分為六個章節概要分述如下
第一章說明本論文的研究動機與目的並對文中所用到的理論架構以及
介紹作一概略性的敘述
第二章針對整個 GPS 發展概況系統架構衛星訊號結構與訊號格式
定位原理GPS 誤差分析做一個詳細的介紹
第三章針對整個 GIS 地理資訊發展情況電子地圖的介紹以及衛星座
標系統轉換做一個詳細的介紹
第四章針對無線通訊 GPRS 網路的發展方式作一個詳盡的介紹
第五章介紹車輛監控系統的整體架構嵌入式移動車載系統的硬體架構設
計嵌入式移動系統韌體程式結構與流程以及即時監控程式與系
統的介紹
第六章操作說明與實驗結果討論說明實驗的程序實際道路路況測試
與實際的汽車導航操作
第七章結論與未來展望總結本論文的研究成果並說明未來應用的方向以
及其發展性
5
第二章 GPS 全球衛星定位系統分析
21 GPS 發展概況
所謂 GPS 是全球衛星定位系統(Global Position System)簡稱為美國國防
部為軍事上定位及導航目的所發展的GPS 可以極準確地提供七種定位所需
的訊息三度空間位置三度空間的速度以及時間因為它的全天候高
準確定位的特性不但成功地應用在現代軍事化設備上而且在民間用途方
面也因其實用潛力雄厚而深受矚目而 GPS 的優越性能已漸漸應用於各
方面例如船艦及飛機的導航定位可以在瞬間獲得位置及速度的數值
港灣內將導航及追蹤結合以減少碰撞的可能性增加航道安全性的管理
油井鑽勘平台的定位礦產源位置的定位飛彈上的導航航空海上陸
地之測量等等都應為有 GPS 的加入而更趨於完善的目標
211 GPS 的緣起
1958 年 12 月美國海軍武器實驗室開始建立為美國海軍軍艦導航服務
的衛星系統即「海軍導航衛星系統」(Navy Navigation Satellite System
NNSS)此系統中衛星運行的軌道大多通過地球南北極因此也稱為「子午
(Transit)衛星系統」1964 年該系統建構完成提供美國軍方使用1967
年 7 月 29 日美國政府宣佈將該系統解密並提供民間使用為衛星定位系
統運用的開始
由於該系統不受氣候條件影響自動化程度較高且具有良好的定位精
度所以解密之後立即引起各方學者的研究與應用雖然 NNSS 把導航技術
的發展推向另一個新時代但由於該系統的衛星數量較少(5-6 顆)衛星運
轉的高度較低(平均運行高度約 1000km)從地面站觀測到衛星的時間間隔
較長(平均約 15 小時)因而無法提供連續的三維導航且獲得一次導航
求解所需的時間較長無法滿足軍事方面(由其是高速飛行目標如飛機
6
導彈)導航需求
於是美國國防部為軍事定時定位與導航目的將美國海軍所開發的
TIMATION(Time And Navigation)系統和美國空軍的 621B 兩個專案予以合
併後並改名為「全球衛星定位系統」(NAVSTARGPSNavigation Satellite
Timing And RangingGlobal Positioning System直接簡稱為 GPS)希望能
以衛星導航為基礎的技術可構成主要的無線電導航系統滿足各方面科技的
應用
212 GPS 的發展
全球定位系統所使用的衛星稱為 NAVSTAR第一顆 GPS 衛星於 1978
年 2 月 22 日發射GPS 為美國繼阿波羅登月與太空梭發展計劃後的第三大
太空國防計劃此一計劃係利用 GPS 衛星發射電波訊號以提供定時定位
及導航使用其精確度極高且不受電波干擾及時間地點和天候的影響
提供使用者全天候即時的位置與時間資訊所能達到的精度較以往的導航
及測量方法都來得高
在 1993 年 12 月 8 日第 24 顆 GPS 衛星進入太空軌道運行後GPS 已達
到初步操作能力(Initial Operational CapabilityIOC)24 顆 GPS 衛星(包
含初期測試用的 Block I 與量產型 Block IIIIA)提供全世界 24 小時全天候定
位與導航資訊
美國空軍太空司令部(US Air Force Space CommandAFSC)於 1995
年 4 月 27 日宣布 GPS 已達到完整操作能力(Full Operational Capability
FOC)將 IOC 中的 Block I 衛星加以汰換24 顆衛星全部為 Block IIIIA 衛
星所組成成功地滿足軍事實務的操作
GPS 衛星佈署在離地球表面約 20200 公里上空的圓形軌道上採圓形
軌道的目的在於可增大地面可見範圍及增強全球均勻覆蓋它們平均分佈於
7
6 個軌道面上每個軌道面上各有 4 顆呈 55deg 角傾斜繞行地球運轉每
11 小時 58 分繞行地球一周不論任何時間地點同時至少有 4 顆以上的
衛星出現在我們的上空
由於 GPS 的運用技術迅速發展使得民間的應用需求與日俱增對傳
統導航方式更有革命性的影響
由於 GPS 操作簡便迅速成果精確其用途甚為廣泛除軍事用途外
更大量運用在民用航空航海車輛控制油源探測大氣地球科學等
特別是協助交通運輸環境生態森林地質等資訊之調查管理與土地測
量等目前國內外已大量在汽車上安裝 GPS 接收儀並配合電子地圖以幫
助駕駛者找到捷運及目的地同時如徒步登山及狩獵者亦可利用 GPS 提
供方位不致迷失我們可以肯定一點日後 GPS 在航電國防交通甚至
日常生活都將佔有非常重要的地位
213 GPS 的應用
一陸地應用
(一) 大地測量國家及區域控制網建立精密工程測量
(二) 測量及製圖地籍測量地理資訊系統之資料測量工程測量
(三) 交通路網圖繪製
(四) 地球動力研究與變形監測
(五) 高精度時間比對
(六) 陸上導航支援緊急車輛(警車救護車消防保全等)車輛
監控派遣(計程車危險性車輛貨櫃運輸火車等)
(七) 森林巡視員之搜救任務如登山意外事故山崩雪崩等
(八) 森林資源管理
8
二空中應用
(一) 機場精密進場著陸國內線國際線民航機及直昇機導航
(二)空中交通管制作業
(三) 航空攝影測量導引與控制空中重力及磁力測量之定位
(四)農藥噴灑
(五)休閒娛樂滑翔機飛行傘輕航機等
22 GPS 系統架構
全球衛星定位系統(GPS)只要是利用接收衛星軌道資料求解出衛星所在
位置再計算出接收器本身與衛星間的距離以求出GPS接收器的位置因
此全球定位系統是一套不受地點時間與天候影響的高精度定位系統
全球衛星定位系統架構可分為三大部份[15]太空部份( the space
segment)控制部份(the control segment)及使用者部份(the user segment)
圖 2-1 全球衛星定位系統架構[15]
221 太空部份(the space segment)
GPS 系統之太空部份針對運行的衛星本體而言目前係由 24 顆操作衛
9
星及 3 顆備用衛星所組成三顆備用衛星的功能主要在作為衛星失效時之備
用及加強衛星之幾何分佈在平時這些衛星也可用於定位故為主動預備
(active spare)方式運作
27 顆分佈於 6 個軌道面上如圖 2-2[1]衛星軌道相對地球赤道面的傾角
為 55deg如圖 2-3每個軌道面上至少分佈有 4 顆衛星軌道面與另一軌道面
上的衛星則相差 40deg衛星高度為 20200 公里每 11 小時 58 分繞行地球一
周這樣可以讓使用者在全球各地任何時刻都可以同時觀測到 4 顆以上的衛
星以利實施三度空間之定位測量
圖 2-2 衛星分布圖[1]
圖 2-3 地球赤道面的傾角[1]
10
222 控制部份(the control segment)
對於 GPS 導航定位而言GPS 衛星是一動態的已知點它是依據衛星
傳送的星曆計算而得所謂衛星星曆即是一系列描述衛星運動及其軌道的參
數每顆 GPS 衛星所傳送的星曆皆由 GPS 的地面監控系統所提供
衛星進入軌道運行之後其各種設備是否正常運作是否依預定軌道運
行等皆需要由地面設備來進行監測和控制
此外地面監控系統還有一個重要的工作就是保持各衛星處於同一時
間標準(即 GPS 時間系統)因此由地面監控系統監測各衛星的時間計
算它們的有關正數進而將導航訊息傳送給用戶以確保處於 GPS 時系
GPS 之操縱控制部分已於 1985 年 9 月完成整個控制部分包括了一個
主控站三個地面控制站五個監測站而五個監測站中的三個(Ascension
IslandDiego GarciaKwajalein)為地面控制站其擁有專有的地面天線
主控站位於美國科羅拉多州之 Springs主要功能為彙整監測站所蒐集
的資料並計算衛星的軌道與時間參數之後做軌道平滑處理並將資料傳送
至地面控制站然後在藉由監控站專用天線將資料上傳至衛星除此之外
衛星的控制與操作皆為主控站的主要任務
每個監測站均擁有一個GPS雙頻接收機標準銫原子鐘感測器及資料
處理機其座標都是經過美國國防製圖局精密測量而得每個監測站必須每
天24小時連續追蹤觀測每一顆衛星並將每一秒半之虛擬距離接收量及接收
所得之氣象資料及電離層資料聯合求解得每15分鐘一個平滑資料然後將
資料傳送至主控站主控站即整合個監視站之資料計算衛星星曆衛星時鐘
改正量及電離層改正係數等並且將所得結果彙集成導航訊息傳遞到地面天
線處再由地面天線傳送到各衛星上以更新衛星內的資料如此衛星即
可傳送新的資料給使用者接收使用如圖2-4
11
圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

目 錄
摘要helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipI
AbstracthelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipII
目錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipIII
圖目錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipV
表目錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellipVII
第一章 緒論helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip1
11 研究動機helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip1
12 研究目的helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip1
13 系統簡介helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip3
14 文獻回顧helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip4
15 論文組織與概觀helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip5
第二章 GPS 全球衛星定位系統分析helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip6
21 GPS發展概況helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip6
211 GPS 的緣起helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip6
212 GPS 的發展helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip7
213 GPS 的應用helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip8
22 GPS 系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
221 太空部分helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
222 控制部分helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip11
III
223 使用者部分helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
23 衛星訊號結構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip13
231 衛星信號格式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip14
24 衛星定位原理helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip16
241 GPS誤差分析helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip18
第三章 GIS 地理資訊系統發展概況helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip20
31 衛星座標系統與轉換helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21
第四章 GSMGPRS 無線行動通訊技術helliphelliphelliphelliphelliphelliphelliphelliphelliphellip25
41 GPRS 網路的發展方式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip25
第五章 車輛監控系統架構與移動系統的介紹helliphelliphelliphelliphelliphelliphellip29
51 車輛監控系統的整體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip29
52 嵌入式移動系統之硬體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip30
53 嵌入式移動系統韌體程式構成與流程helliphelliphelliphelliphelliphelliphellip33
54 即時監控系統程式介紹helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip37
第六章 操作說明與實驗結果helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip40
第七章 結論與未來展望helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip52
參考文獻helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip54
IV
圖目錄
圖 1-1 車輛監控系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip2
圖 1-2 車輛監控系統基本架構圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip3
圖 2-1 全球衛星定位系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
圖 2-2 衛星分布圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip10
圖 2-3 地球赤道面的傾角helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip10
圖 2-4 地面控制站與衛星的示意圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
圖 2-5 GPS 接收器helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip13
圖 2-6 衛星訊號結構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip14
圖 2-7 虛擬距離時間測量helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip17
圖 2-8 GPS的誤差helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip18
圖 3-1 台灣地區 TM 座標系統helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21 02
圖 3-2 WGS84 橢圓座標helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21
圖 3-3 座標轉換流程helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip22
圖 4-1 電路交換型態helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip26
圖 4-2 封包交換型態helliphelliphelliphelliphellip27
圖 4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式hellip28
圖 5-1 車輛管理系統之整體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip29
圖 5-2 嵌入式移動車載平台的架構圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip31
圖 5-3 ARNUX 7511 實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip32
圖 5-4 BENQ M22 GSMGPRS Module實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphellip32
圖 5-5 GPS Module 實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip33
圖 5-6 程式流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip37
圖 5-7 主畫面程式流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip38
圖 5-8 即時監控主畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip39
V
圖 6-1 嵌入式移動車載系統實體全圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip40
圖 6-2 Linux 主機畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
圖 6-3 終端機初使化程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
圖 6-4 回傳中繼點訊號畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
圖 6-5 回傳終點訊號定位數據畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
圖 6-6 緊急狀況發生時畫面一helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
圖 6-7 緊急狀況發生時畫面二helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
圖 6-8 緊急狀況解除畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
圖 6-9 語音通話與結束畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
圖 6-10 Power Off 跳出執行畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
圖 6-11 監控台處於Listening狀態畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
圖 6-12 車載端透過GPRS登入監控台的畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
圖 6-13 監控台行車資訊紀錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
圖 6-14 台科大的電子資訊大樓helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
圖 6-15 實際路測圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
圖 6-16 地圖顯示出發點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip48
圖 6-17 地圖顯示中繼點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip48
圖 6-18 地圖顯示中繼點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip49
圖 6-19 地圖顯示緊急狀況發生時位置之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphellip49
圖 6-20 地圖顯示終點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip50
圖 6-21 監控台多人連線測試畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip51
VI
表目錄
表4-1 GSM與GPRS的比較helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip27
VII
第一章 緒論
11 研究動機
近年來由於網際網路的蓬勃發展使得人類日常生活中常常和網際網
路有著密切的關係在此同時無線通訊的技術也是日新月異行動電話的發
展也逐漸的進入成熟的階段故許多與網際網路結合的行動通訊產品也大量
的出現
由於網際網路傳輸快速且行動通訊具有高移動性及高涵蓋性的特
性再加上 GPS 全球定位系統精準的定位所以車輛的即時監控系統現
今已愈來愈普遍許多先進國家相繼發展智慧型車輛系統在其相關系統中
又以全球衛星定位系統(Global Positioning System GPS)[1] 和地理資訊系統
(Geographic Information System GIS) 系統發展最為進步其包含了自動車
輛定位技術(Automatic Vehicle Location AVL)[11]以及地理資訊的提供等
等其中汽車導航系統導航的方式是將裝在汽車上的 GPS 接收器所接收的
衛星定位資訊傳送到車中的電腦處理再將座標及行徑路徑顯示在電子地圖
上其精確度必須考量衛星定位的誤差以及電子地圖的精準度
由於衛星是處在相當高的運行軌道上其傳送的訊號是相當的微弱因
此它不像一般通訊無線電可在室內使用或收到訊號在使用時需在室外及天
空開闊度較佳之地方才能使用否則若大部份之衛星信號被建築物金屬遮
蓋物濃密樹林等所阻擋接收器將無法獲得足夠的衛星訊息來計算出所在
位置之座標故 GPS 在定位應用上並不適合建構於一般個人行動電話上的
定位應用本文所設計的系統並非針對個人用途的定位而是針對道路上車
輛的定位應用因為道路上遮蔽物較少不至於影響衛星定位功能
12 研究目的
本文中的車輛即時監控管理系統的架構如圖 1 包含以 ARM 7 為核心的
嵌入式移動平台無線通訊技術網路監控中心即是網路與行動通訊結合
1
GPS 全球定位系統的最佳組合其功能主要在於提供駕駛者行的安全方便
快速並非只是侷限於汽車的動態定位而是廣泛的包括定位與定位後的導
引在日本與歐美等先進國家已發展多年也有實際的成果展現在世人眼前
但是在台灣還是屬於剛起步的階段
因此本系統的開發必須先從定位及導航觀念為出發點並結合地理資訊
系統(GIS)才能夠達成目標
由於美國國防部所建立的全球衛星定位系統與地理資訊系統為車輛監
控系統之主要基礎因此本論文首先就GPS 及GIS 的基本理論先加以探
討再利用GPS 衛星接收器將所需的所在地地理資訊資料擷取下來經過
座標轉換的步驟將所在地的地理位資料與電子地圖作一結合分析形成汽
車監控系統的雛形
圖 1-1 車輛監控系統架構
本論文著重於嵌入式移動系統之實現進而結合監控台的功能來達成
車輛監控之目標嵌入式移動系統包含 GPS 全球衛星定位系統GSMGPRS
無線通訊模組ARM 7TDMI CPU 核心處理器等三大部分主要利用 ARM 7
進行控制透過 GPS 衛星定位器接收來自衛星的定位訊號再加上車輛
ID 與車輛狀況的描述後經由 GSMGPRS 模組把加工後的定位資料傳至
監控台讓管理者能隨時掌握車輛的一舉一動並於必要時與之聯繫了解
2
車輛運行狀況或進行新路線的派遣若是發生緊急狀況時也能全程錄音
即時監控
此監控系統可應用在即時車輛管理及車輛監控上並可將交通運輸推展
至智慧運輸系統上使得車輛使用能夠更加有效率及安全
13 系統簡介
車輛監控系統的特色在於不僅能夠非常有效的掌握車輛位置狀況即時
下達指令至車載 Client 端上經由即時監控中心即可觀測每一台車輛的行車
狀況與緊急情況而且監控系統非常大的好處在於低廉的通信費用
透過 GPS 接收器與 GPRS(General Packet Radio Service) 的無線通訊
網路可動態取得車輛所在位置資訊即時傳遞至監控台由監控台人員執
行車輛管理監控台與路線規劃的動作將所有派遣資訊即時傳遞至執行勤務
的運送人員依據監控台指令完成遞送工作
監控台此時扮演更重要的溝通聯繫角色可以彙總即時路況資訊傳
遞綜合研判的行車動向指令協助線上動態運行的車輛獲得即時的行車指
南車輛上所裝置的嵌入式移動系統亦可依車輛運作狀況在發生緊急事件
時於監控台可獲得最即時的數據資料例如車輛故障之拖救服務交通事
故發生時之速度數據舉證等等車輛監控系統之基本架構圖如圖 1-2 所示
圖 1-2 車輛監控系統基本架構圖[10]
3
14 論文回顧
GPS 與 GIS 的發展已有相當的一段時間無論在期刊文獻論文各
方面都有許多的研究與探討我們特別針對 GPS 與 GIS 結合在汽車監控部
分加以提出做為研究的基礎
世界上已有許多國家早在多年前即實際的進行有關汽車導航系統開發
與研究像加拿大的 Calgary 大學所研發的 AVL2000 即為一個非常成功的
例子[2]~[6]
根據相關的文獻研究目前仍在繼續發展及改進的帶路系統共有 40 餘
種之多而且已從第一代的〝Where am I〞獨立系統(AutonomousStand alone
system)及第二代的〝Where are You〞快速傳遞系統(Dispatch system)和加入
了道路資訊或導引系統的第三代〝How do I get there〞發展到現在的智慧型
帶路系統[2][7]
由於在過去的文獻中如文獻[8][9]車輛的位置透過 GPS 接收完衛星
訊號之後是藉由 GSM 的簡訊發送系統來傳送 GPS 的定位資訊但是由
於很多因素如 GSM 基地台塞機塞車行動通訊模組暫時不在接收範圍內
網路傳輸品質不穩定如傳輸速度較慢或者行動電話記憶體滿了使得簡訊
遺失造成車輛的定位無法作一個即時的回報因此在車輛的監控方面將會
造成很大的缺失又因發送簡訊的時間是有時間間距的至少間距五分鐘以
上如果發生緊急狀況時就無法立即作一個很好的處置又因簡訊是以傳
送的封數來計算如此監控的花費將會非常大
由於 GPS 現今已經發展的非常成熟了所以有越來越多的導航系統
會跟 GPS 來做結合如文獻[10]~[14]以 electronic road pricing (ERP) system
電子收費系統文獻[14]來說結合 GPS 全球衛星定位系統就是一個非常創新
的想法使用 GPS 科技來做結合不只可以非常有效率划算但是它
必須透過公路上所架設固定的跨軌訊號杆來做資訊的傳送對於監控就比
4
較沒有效率了所以本文將會針對即時的監控以及車輛的防護安全作一
個完善的改進
隨著人類追求產品的服務功能與品質的提昇要求迅速以及智慧型功能
的增進相信更進步的汽車監控系統不久將會展現於世人的面前
15 論文組織及概觀
本篇論文總共分為六個章節概要分述如下
第一章說明本論文的研究動機與目的並對文中所用到的理論架構以及
介紹作一概略性的敘述
第二章針對整個 GPS 發展概況系統架構衛星訊號結構與訊號格式
定位原理GPS 誤差分析做一個詳細的介紹
第三章針對整個 GIS 地理資訊發展情況電子地圖的介紹以及衛星座
標系統轉換做一個詳細的介紹
第四章針對無線通訊 GPRS 網路的發展方式作一個詳盡的介紹
第五章介紹車輛監控系統的整體架構嵌入式移動車載系統的硬體架構設
計嵌入式移動系統韌體程式結構與流程以及即時監控程式與系
統的介紹
第六章操作說明與實驗結果討論說明實驗的程序實際道路路況測試
與實際的汽車導航操作
第七章結論與未來展望總結本論文的研究成果並說明未來應用的方向以
及其發展性
5
第二章 GPS 全球衛星定位系統分析
21 GPS 發展概況
所謂 GPS 是全球衛星定位系統(Global Position System)簡稱為美國國防
部為軍事上定位及導航目的所發展的GPS 可以極準確地提供七種定位所需
的訊息三度空間位置三度空間的速度以及時間因為它的全天候高
準確定位的特性不但成功地應用在現代軍事化設備上而且在民間用途方
面也因其實用潛力雄厚而深受矚目而 GPS 的優越性能已漸漸應用於各
方面例如船艦及飛機的導航定位可以在瞬間獲得位置及速度的數值
港灣內將導航及追蹤結合以減少碰撞的可能性增加航道安全性的管理
油井鑽勘平台的定位礦產源位置的定位飛彈上的導航航空海上陸
地之測量等等都應為有 GPS 的加入而更趨於完善的目標
211 GPS 的緣起
1958 年 12 月美國海軍武器實驗室開始建立為美國海軍軍艦導航服務
的衛星系統即「海軍導航衛星系統」(Navy Navigation Satellite System
NNSS)此系統中衛星運行的軌道大多通過地球南北極因此也稱為「子午
(Transit)衛星系統」1964 年該系統建構完成提供美國軍方使用1967
年 7 月 29 日美國政府宣佈將該系統解密並提供民間使用為衛星定位系
統運用的開始
由於該系統不受氣候條件影響自動化程度較高且具有良好的定位精
度所以解密之後立即引起各方學者的研究與應用雖然 NNSS 把導航技術
的發展推向另一個新時代但由於該系統的衛星數量較少(5-6 顆)衛星運
轉的高度較低(平均運行高度約 1000km)從地面站觀測到衛星的時間間隔
較長(平均約 15 小時)因而無法提供連續的三維導航且獲得一次導航
求解所需的時間較長無法滿足軍事方面(由其是高速飛行目標如飛機
6
導彈)導航需求
於是美國國防部為軍事定時定位與導航目的將美國海軍所開發的
TIMATION(Time And Navigation)系統和美國空軍的 621B 兩個專案予以合
併後並改名為「全球衛星定位系統」(NAVSTARGPSNavigation Satellite
Timing And RangingGlobal Positioning System直接簡稱為 GPS)希望能
以衛星導航為基礎的技術可構成主要的無線電導航系統滿足各方面科技的
應用
212 GPS 的發展
全球定位系統所使用的衛星稱為 NAVSTAR第一顆 GPS 衛星於 1978
年 2 月 22 日發射GPS 為美國繼阿波羅登月與太空梭發展計劃後的第三大
太空國防計劃此一計劃係利用 GPS 衛星發射電波訊號以提供定時定位
及導航使用其精確度極高且不受電波干擾及時間地點和天候的影響
提供使用者全天候即時的位置與時間資訊所能達到的精度較以往的導航
及測量方法都來得高
在 1993 年 12 月 8 日第 24 顆 GPS 衛星進入太空軌道運行後GPS 已達
到初步操作能力(Initial Operational CapabilityIOC)24 顆 GPS 衛星(包
含初期測試用的 Block I 與量產型 Block IIIIA)提供全世界 24 小時全天候定
位與導航資訊
美國空軍太空司令部(US Air Force Space CommandAFSC)於 1995
年 4 月 27 日宣布 GPS 已達到完整操作能力(Full Operational Capability
FOC)將 IOC 中的 Block I 衛星加以汰換24 顆衛星全部為 Block IIIIA 衛
星所組成成功地滿足軍事實務的操作
GPS 衛星佈署在離地球表面約 20200 公里上空的圓形軌道上採圓形
軌道的目的在於可增大地面可見範圍及增強全球均勻覆蓋它們平均分佈於
7
6 個軌道面上每個軌道面上各有 4 顆呈 55deg 角傾斜繞行地球運轉每
11 小時 58 分繞行地球一周不論任何時間地點同時至少有 4 顆以上的
衛星出現在我們的上空
由於 GPS 的運用技術迅速發展使得民間的應用需求與日俱增對傳
統導航方式更有革命性的影響
由於 GPS 操作簡便迅速成果精確其用途甚為廣泛除軍事用途外
更大量運用在民用航空航海車輛控制油源探測大氣地球科學等
特別是協助交通運輸環境生態森林地質等資訊之調查管理與土地測
量等目前國內外已大量在汽車上安裝 GPS 接收儀並配合電子地圖以幫
助駕駛者找到捷運及目的地同時如徒步登山及狩獵者亦可利用 GPS 提
供方位不致迷失我們可以肯定一點日後 GPS 在航電國防交通甚至
日常生活都將佔有非常重要的地位
213 GPS 的應用
一陸地應用
(一) 大地測量國家及區域控制網建立精密工程測量
(二) 測量及製圖地籍測量地理資訊系統之資料測量工程測量
(三) 交通路網圖繪製
(四) 地球動力研究與變形監測
(五) 高精度時間比對
(六) 陸上導航支援緊急車輛(警車救護車消防保全等)車輛
監控派遣(計程車危險性車輛貨櫃運輸火車等)
(七) 森林巡視員之搜救任務如登山意外事故山崩雪崩等
(八) 森林資源管理
8
二空中應用
(一) 機場精密進場著陸國內線國際線民航機及直昇機導航
(二)空中交通管制作業
(三) 航空攝影測量導引與控制空中重力及磁力測量之定位
(四)農藥噴灑
(五)休閒娛樂滑翔機飛行傘輕航機等
22 GPS 系統架構
全球衛星定位系統(GPS)只要是利用接收衛星軌道資料求解出衛星所在
位置再計算出接收器本身與衛星間的距離以求出GPS接收器的位置因
此全球定位系統是一套不受地點時間與天候影響的高精度定位系統
全球衛星定位系統架構可分為三大部份[15]太空部份( the space
segment)控制部份(the control segment)及使用者部份(the user segment)
圖 2-1 全球衛星定位系統架構[15]
221 太空部份(the space segment)
GPS 系統之太空部份針對運行的衛星本體而言目前係由 24 顆操作衛
9
星及 3 顆備用衛星所組成三顆備用衛星的功能主要在作為衛星失效時之備
用及加強衛星之幾何分佈在平時這些衛星也可用於定位故為主動預備
(active spare)方式運作
27 顆分佈於 6 個軌道面上如圖 2-2[1]衛星軌道相對地球赤道面的傾角
為 55deg如圖 2-3每個軌道面上至少分佈有 4 顆衛星軌道面與另一軌道面
上的衛星則相差 40deg衛星高度為 20200 公里每 11 小時 58 分繞行地球一
周這樣可以讓使用者在全球各地任何時刻都可以同時觀測到 4 顆以上的衛
星以利實施三度空間之定位測量
圖 2-2 衛星分布圖[1]
圖 2-3 地球赤道面的傾角[1]
10
222 控制部份(the control segment)
對於 GPS 導航定位而言GPS 衛星是一動態的已知點它是依據衛星
傳送的星曆計算而得所謂衛星星曆即是一系列描述衛星運動及其軌道的參
數每顆 GPS 衛星所傳送的星曆皆由 GPS 的地面監控系統所提供
衛星進入軌道運行之後其各種設備是否正常運作是否依預定軌道運
行等皆需要由地面設備來進行監測和控制
此外地面監控系統還有一個重要的工作就是保持各衛星處於同一時
間標準(即 GPS 時間系統)因此由地面監控系統監測各衛星的時間計
算它們的有關正數進而將導航訊息傳送給用戶以確保處於 GPS 時系
GPS 之操縱控制部分已於 1985 年 9 月完成整個控制部分包括了一個
主控站三個地面控制站五個監測站而五個監測站中的三個(Ascension
IslandDiego GarciaKwajalein)為地面控制站其擁有專有的地面天線
主控站位於美國科羅拉多州之 Springs主要功能為彙整監測站所蒐集
的資料並計算衛星的軌道與時間參數之後做軌道平滑處理並將資料傳送
至地面控制站然後在藉由監控站專用天線將資料上傳至衛星除此之外
衛星的控制與操作皆為主控站的主要任務
每個監測站均擁有一個GPS雙頻接收機標準銫原子鐘感測器及資料
處理機其座標都是經過美國國防製圖局精密測量而得每個監測站必須每
天24小時連續追蹤觀測每一顆衛星並將每一秒半之虛擬距離接收量及接收
所得之氣象資料及電離層資料聯合求解得每15分鐘一個平滑資料然後將
資料傳送至主控站主控站即整合個監視站之資料計算衛星星曆衛星時鐘
改正量及電離層改正係數等並且將所得結果彙集成導航訊息傳遞到地面天
線處再由地面天線傳送到各衛星上以更新衛星內的資料如此衛星即
可傳送新的資料給使用者接收使用如圖2-4
11
圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-
223 使用者部分helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
23 衛星訊號結構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip13
231 衛星信號格式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip14
24 衛星定位原理helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip16
241 GPS誤差分析helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip18
第三章 GIS 地理資訊系統發展概況helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip20
31 衛星座標系統與轉換helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21
第四章 GSMGPRS 無線行動通訊技術helliphelliphelliphelliphelliphelliphelliphelliphelliphellip25
41 GPRS 網路的發展方式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip25
第五章 車輛監控系統架構與移動系統的介紹helliphelliphelliphelliphelliphelliphellip29
51 車輛監控系統的整體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip29
52 嵌入式移動系統之硬體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip30
53 嵌入式移動系統韌體程式構成與流程helliphelliphelliphelliphelliphelliphellip33
54 即時監控系統程式介紹helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip37
第六章 操作說明與實驗結果helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip40
第七章 結論與未來展望helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip52
參考文獻helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip54
IV
圖目錄
圖 1-1 車輛監控系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip2
圖 1-2 車輛監控系統基本架構圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip3
圖 2-1 全球衛星定位系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
圖 2-2 衛星分布圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip10
圖 2-3 地球赤道面的傾角helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip10
圖 2-4 地面控制站與衛星的示意圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
圖 2-5 GPS 接收器helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip13
圖 2-6 衛星訊號結構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip14
圖 2-7 虛擬距離時間測量helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip17
圖 2-8 GPS的誤差helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip18
圖 3-1 台灣地區 TM 座標系統helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21 02
圖 3-2 WGS84 橢圓座標helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21
圖 3-3 座標轉換流程helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip22
圖 4-1 電路交換型態helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip26
圖 4-2 封包交換型態helliphelliphelliphelliphellip27
圖 4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式hellip28
圖 5-1 車輛管理系統之整體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip29
圖 5-2 嵌入式移動車載平台的架構圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip31
圖 5-3 ARNUX 7511 實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip32
圖 5-4 BENQ M22 GSMGPRS Module實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphellip32
圖 5-5 GPS Module 實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip33
圖 5-6 程式流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip37
圖 5-7 主畫面程式流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip38
圖 5-8 即時監控主畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip39
V
圖 6-1 嵌入式移動車載系統實體全圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip40
圖 6-2 Linux 主機畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
圖 6-3 終端機初使化程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
圖 6-4 回傳中繼點訊號畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
圖 6-5 回傳終點訊號定位數據畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
圖 6-6 緊急狀況發生時畫面一helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
圖 6-7 緊急狀況發生時畫面二helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
圖 6-8 緊急狀況解除畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
圖 6-9 語音通話與結束畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
圖 6-10 Power Off 跳出執行畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
圖 6-11 監控台處於Listening狀態畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
圖 6-12 車載端透過GPRS登入監控台的畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
圖 6-13 監控台行車資訊紀錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
圖 6-14 台科大的電子資訊大樓helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
圖 6-15 實際路測圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
圖 6-16 地圖顯示出發點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip48
圖 6-17 地圖顯示中繼點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip48
圖 6-18 地圖顯示中繼點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip49
圖 6-19 地圖顯示緊急狀況發生時位置之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphellip49
圖 6-20 地圖顯示終點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip50
圖 6-21 監控台多人連線測試畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip51
VI
表目錄
表4-1 GSM與GPRS的比較helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip27
VII
第一章 緒論
11 研究動機
近年來由於網際網路的蓬勃發展使得人類日常生活中常常和網際網
路有著密切的關係在此同時無線通訊的技術也是日新月異行動電話的發
展也逐漸的進入成熟的階段故許多與網際網路結合的行動通訊產品也大量
的出現
由於網際網路傳輸快速且行動通訊具有高移動性及高涵蓋性的特
性再加上 GPS 全球定位系統精準的定位所以車輛的即時監控系統現
今已愈來愈普遍許多先進國家相繼發展智慧型車輛系統在其相關系統中
又以全球衛星定位系統(Global Positioning System GPS)[1] 和地理資訊系統
(Geographic Information System GIS) 系統發展最為進步其包含了自動車
輛定位技術(Automatic Vehicle Location AVL)[11]以及地理資訊的提供等
等其中汽車導航系統導航的方式是將裝在汽車上的 GPS 接收器所接收的
衛星定位資訊傳送到車中的電腦處理再將座標及行徑路徑顯示在電子地圖
上其精確度必須考量衛星定位的誤差以及電子地圖的精準度
由於衛星是處在相當高的運行軌道上其傳送的訊號是相當的微弱因
此它不像一般通訊無線電可在室內使用或收到訊號在使用時需在室外及天
空開闊度較佳之地方才能使用否則若大部份之衛星信號被建築物金屬遮
蓋物濃密樹林等所阻擋接收器將無法獲得足夠的衛星訊息來計算出所在
位置之座標故 GPS 在定位應用上並不適合建構於一般個人行動電話上的
定位應用本文所設計的系統並非針對個人用途的定位而是針對道路上車
輛的定位應用因為道路上遮蔽物較少不至於影響衛星定位功能
12 研究目的
本文中的車輛即時監控管理系統的架構如圖 1 包含以 ARM 7 為核心的
嵌入式移動平台無線通訊技術網路監控中心即是網路與行動通訊結合
1
GPS 全球定位系統的最佳組合其功能主要在於提供駕駛者行的安全方便
快速並非只是侷限於汽車的動態定位而是廣泛的包括定位與定位後的導
引在日本與歐美等先進國家已發展多年也有實際的成果展現在世人眼前
但是在台灣還是屬於剛起步的階段
因此本系統的開發必須先從定位及導航觀念為出發點並結合地理資訊
系統(GIS)才能夠達成目標
由於美國國防部所建立的全球衛星定位系統與地理資訊系統為車輛監
控系統之主要基礎因此本論文首先就GPS 及GIS 的基本理論先加以探
討再利用GPS 衛星接收器將所需的所在地地理資訊資料擷取下來經過
座標轉換的步驟將所在地的地理位資料與電子地圖作一結合分析形成汽
車監控系統的雛形
圖 1-1 車輛監控系統架構
本論文著重於嵌入式移動系統之實現進而結合監控台的功能來達成
車輛監控之目標嵌入式移動系統包含 GPS 全球衛星定位系統GSMGPRS
無線通訊模組ARM 7TDMI CPU 核心處理器等三大部分主要利用 ARM 7
進行控制透過 GPS 衛星定位器接收來自衛星的定位訊號再加上車輛
ID 與車輛狀況的描述後經由 GSMGPRS 模組把加工後的定位資料傳至
監控台讓管理者能隨時掌握車輛的一舉一動並於必要時與之聯繫了解
2
車輛運行狀況或進行新路線的派遣若是發生緊急狀況時也能全程錄音
即時監控
此監控系統可應用在即時車輛管理及車輛監控上並可將交通運輸推展
至智慧運輸系統上使得車輛使用能夠更加有效率及安全
13 系統簡介
車輛監控系統的特色在於不僅能夠非常有效的掌握車輛位置狀況即時
下達指令至車載 Client 端上經由即時監控中心即可觀測每一台車輛的行車
狀況與緊急情況而且監控系統非常大的好處在於低廉的通信費用
透過 GPS 接收器與 GPRS(General Packet Radio Service) 的無線通訊
網路可動態取得車輛所在位置資訊即時傳遞至監控台由監控台人員執
行車輛管理監控台與路線規劃的動作將所有派遣資訊即時傳遞至執行勤務
的運送人員依據監控台指令完成遞送工作
監控台此時扮演更重要的溝通聯繫角色可以彙總即時路況資訊傳
遞綜合研判的行車動向指令協助線上動態運行的車輛獲得即時的行車指
南車輛上所裝置的嵌入式移動系統亦可依車輛運作狀況在發生緊急事件
時於監控台可獲得最即時的數據資料例如車輛故障之拖救服務交通事
故發生時之速度數據舉證等等車輛監控系統之基本架構圖如圖 1-2 所示
圖 1-2 車輛監控系統基本架構圖[10]
3
14 論文回顧
GPS 與 GIS 的發展已有相當的一段時間無論在期刊文獻論文各
方面都有許多的研究與探討我們特別針對 GPS 與 GIS 結合在汽車監控部
分加以提出做為研究的基礎
世界上已有許多國家早在多年前即實際的進行有關汽車導航系統開發
與研究像加拿大的 Calgary 大學所研發的 AVL2000 即為一個非常成功的
例子[2]~[6]
根據相關的文獻研究目前仍在繼續發展及改進的帶路系統共有 40 餘
種之多而且已從第一代的〝Where am I〞獨立系統(AutonomousStand alone
system)及第二代的〝Where are You〞快速傳遞系統(Dispatch system)和加入
了道路資訊或導引系統的第三代〝How do I get there〞發展到現在的智慧型
帶路系統[2][7]
由於在過去的文獻中如文獻[8][9]車輛的位置透過 GPS 接收完衛星
訊號之後是藉由 GSM 的簡訊發送系統來傳送 GPS 的定位資訊但是由
於很多因素如 GSM 基地台塞機塞車行動通訊模組暫時不在接收範圍內
網路傳輸品質不穩定如傳輸速度較慢或者行動電話記憶體滿了使得簡訊
遺失造成車輛的定位無法作一個即時的回報因此在車輛的監控方面將會
造成很大的缺失又因發送簡訊的時間是有時間間距的至少間距五分鐘以
上如果發生緊急狀況時就無法立即作一個很好的處置又因簡訊是以傳
送的封數來計算如此監控的花費將會非常大
由於 GPS 現今已經發展的非常成熟了所以有越來越多的導航系統
會跟 GPS 來做結合如文獻[10]~[14]以 electronic road pricing (ERP) system
電子收費系統文獻[14]來說結合 GPS 全球衛星定位系統就是一個非常創新
的想法使用 GPS 科技來做結合不只可以非常有效率划算但是它
必須透過公路上所架設固定的跨軌訊號杆來做資訊的傳送對於監控就比
4
較沒有效率了所以本文將會針對即時的監控以及車輛的防護安全作一
個完善的改進
隨著人類追求產品的服務功能與品質的提昇要求迅速以及智慧型功能
的增進相信更進步的汽車監控系統不久將會展現於世人的面前
15 論文組織及概觀
本篇論文總共分為六個章節概要分述如下
第一章說明本論文的研究動機與目的並對文中所用到的理論架構以及
介紹作一概略性的敘述
第二章針對整個 GPS 發展概況系統架構衛星訊號結構與訊號格式
定位原理GPS 誤差分析做一個詳細的介紹
第三章針對整個 GIS 地理資訊發展情況電子地圖的介紹以及衛星座
標系統轉換做一個詳細的介紹
第四章針對無線通訊 GPRS 網路的發展方式作一個詳盡的介紹
第五章介紹車輛監控系統的整體架構嵌入式移動車載系統的硬體架構設
計嵌入式移動系統韌體程式結構與流程以及即時監控程式與系
統的介紹
第六章操作說明與實驗結果討論說明實驗的程序實際道路路況測試
與實際的汽車導航操作
第七章結論與未來展望總結本論文的研究成果並說明未來應用的方向以
及其發展性
5
第二章 GPS 全球衛星定位系統分析
21 GPS 發展概況
所謂 GPS 是全球衛星定位系統(Global Position System)簡稱為美國國防
部為軍事上定位及導航目的所發展的GPS 可以極準確地提供七種定位所需
的訊息三度空間位置三度空間的速度以及時間因為它的全天候高
準確定位的特性不但成功地應用在現代軍事化設備上而且在民間用途方
面也因其實用潛力雄厚而深受矚目而 GPS 的優越性能已漸漸應用於各
方面例如船艦及飛機的導航定位可以在瞬間獲得位置及速度的數值
港灣內將導航及追蹤結合以減少碰撞的可能性增加航道安全性的管理
油井鑽勘平台的定位礦產源位置的定位飛彈上的導航航空海上陸
地之測量等等都應為有 GPS 的加入而更趨於完善的目標
211 GPS 的緣起
1958 年 12 月美國海軍武器實驗室開始建立為美國海軍軍艦導航服務
的衛星系統即「海軍導航衛星系統」(Navy Navigation Satellite System
NNSS)此系統中衛星運行的軌道大多通過地球南北極因此也稱為「子午
(Transit)衛星系統」1964 年該系統建構完成提供美國軍方使用1967
年 7 月 29 日美國政府宣佈將該系統解密並提供民間使用為衛星定位系
統運用的開始
由於該系統不受氣候條件影響自動化程度較高且具有良好的定位精
度所以解密之後立即引起各方學者的研究與應用雖然 NNSS 把導航技術
的發展推向另一個新時代但由於該系統的衛星數量較少(5-6 顆)衛星運
轉的高度較低(平均運行高度約 1000km)從地面站觀測到衛星的時間間隔
較長(平均約 15 小時)因而無法提供連續的三維導航且獲得一次導航
求解所需的時間較長無法滿足軍事方面(由其是高速飛行目標如飛機
6
導彈)導航需求
於是美國國防部為軍事定時定位與導航目的將美國海軍所開發的
TIMATION(Time And Navigation)系統和美國空軍的 621B 兩個專案予以合
併後並改名為「全球衛星定位系統」(NAVSTARGPSNavigation Satellite
Timing And RangingGlobal Positioning System直接簡稱為 GPS)希望能
以衛星導航為基礎的技術可構成主要的無線電導航系統滿足各方面科技的
應用
212 GPS 的發展
全球定位系統所使用的衛星稱為 NAVSTAR第一顆 GPS 衛星於 1978
年 2 月 22 日發射GPS 為美國繼阿波羅登月與太空梭發展計劃後的第三大
太空國防計劃此一計劃係利用 GPS 衛星發射電波訊號以提供定時定位
及導航使用其精確度極高且不受電波干擾及時間地點和天候的影響
提供使用者全天候即時的位置與時間資訊所能達到的精度較以往的導航
及測量方法都來得高
在 1993 年 12 月 8 日第 24 顆 GPS 衛星進入太空軌道運行後GPS 已達
到初步操作能力(Initial Operational CapabilityIOC)24 顆 GPS 衛星(包
含初期測試用的 Block I 與量產型 Block IIIIA)提供全世界 24 小時全天候定
位與導航資訊
美國空軍太空司令部(US Air Force Space CommandAFSC)於 1995
年 4 月 27 日宣布 GPS 已達到完整操作能力(Full Operational Capability
FOC)將 IOC 中的 Block I 衛星加以汰換24 顆衛星全部為 Block IIIIA 衛
星所組成成功地滿足軍事實務的操作
GPS 衛星佈署在離地球表面約 20200 公里上空的圓形軌道上採圓形
軌道的目的在於可增大地面可見範圍及增強全球均勻覆蓋它們平均分佈於
7
6 個軌道面上每個軌道面上各有 4 顆呈 55deg 角傾斜繞行地球運轉每
11 小時 58 分繞行地球一周不論任何時間地點同時至少有 4 顆以上的
衛星出現在我們的上空
由於 GPS 的運用技術迅速發展使得民間的應用需求與日俱增對傳
統導航方式更有革命性的影響
由於 GPS 操作簡便迅速成果精確其用途甚為廣泛除軍事用途外
更大量運用在民用航空航海車輛控制油源探測大氣地球科學等
特別是協助交通運輸環境生態森林地質等資訊之調查管理與土地測
量等目前國內外已大量在汽車上安裝 GPS 接收儀並配合電子地圖以幫
助駕駛者找到捷運及目的地同時如徒步登山及狩獵者亦可利用 GPS 提
供方位不致迷失我們可以肯定一點日後 GPS 在航電國防交通甚至
日常生活都將佔有非常重要的地位
213 GPS 的應用
一陸地應用
(一) 大地測量國家及區域控制網建立精密工程測量
(二) 測量及製圖地籍測量地理資訊系統之資料測量工程測量
(三) 交通路網圖繪製
(四) 地球動力研究與變形監測
(五) 高精度時間比對
(六) 陸上導航支援緊急車輛(警車救護車消防保全等)車輛
監控派遣(計程車危險性車輛貨櫃運輸火車等)
(七) 森林巡視員之搜救任務如登山意外事故山崩雪崩等
(八) 森林資源管理
8
二空中應用
(一) 機場精密進場著陸國內線國際線民航機及直昇機導航
(二)空中交通管制作業
(三) 航空攝影測量導引與控制空中重力及磁力測量之定位
(四)農藥噴灑
(五)休閒娛樂滑翔機飛行傘輕航機等
22 GPS 系統架構
全球衛星定位系統(GPS)只要是利用接收衛星軌道資料求解出衛星所在
位置再計算出接收器本身與衛星間的距離以求出GPS接收器的位置因
此全球定位系統是一套不受地點時間與天候影響的高精度定位系統
全球衛星定位系統架構可分為三大部份[15]太空部份( the space
segment)控制部份(the control segment)及使用者部份(the user segment)
圖 2-1 全球衛星定位系統架構[15]
221 太空部份(the space segment)
GPS 系統之太空部份針對運行的衛星本體而言目前係由 24 顆操作衛
9
星及 3 顆備用衛星所組成三顆備用衛星的功能主要在作為衛星失效時之備
用及加強衛星之幾何分佈在平時這些衛星也可用於定位故為主動預備
(active spare)方式運作
27 顆分佈於 6 個軌道面上如圖 2-2[1]衛星軌道相對地球赤道面的傾角
為 55deg如圖 2-3每個軌道面上至少分佈有 4 顆衛星軌道面與另一軌道面
上的衛星則相差 40deg衛星高度為 20200 公里每 11 小時 58 分繞行地球一
周這樣可以讓使用者在全球各地任何時刻都可以同時觀測到 4 顆以上的衛
星以利實施三度空間之定位測量
圖 2-2 衛星分布圖[1]
圖 2-3 地球赤道面的傾角[1]
10
222 控制部份(the control segment)
對於 GPS 導航定位而言GPS 衛星是一動態的已知點它是依據衛星
傳送的星曆計算而得所謂衛星星曆即是一系列描述衛星運動及其軌道的參
數每顆 GPS 衛星所傳送的星曆皆由 GPS 的地面監控系統所提供
衛星進入軌道運行之後其各種設備是否正常運作是否依預定軌道運
行等皆需要由地面設備來進行監測和控制
此外地面監控系統還有一個重要的工作就是保持各衛星處於同一時
間標準(即 GPS 時間系統)因此由地面監控系統監測各衛星的時間計
算它們的有關正數進而將導航訊息傳送給用戶以確保處於 GPS 時系
GPS 之操縱控制部分已於 1985 年 9 月完成整個控制部分包括了一個
主控站三個地面控制站五個監測站而五個監測站中的三個(Ascension
IslandDiego GarciaKwajalein)為地面控制站其擁有專有的地面天線
主控站位於美國科羅拉多州之 Springs主要功能為彙整監測站所蒐集
的資料並計算衛星的軌道與時間參數之後做軌道平滑處理並將資料傳送
至地面控制站然後在藉由監控站專用天線將資料上傳至衛星除此之外
衛星的控制與操作皆為主控站的主要任務
每個監測站均擁有一個GPS雙頻接收機標準銫原子鐘感測器及資料
處理機其座標都是經過美國國防製圖局精密測量而得每個監測站必須每
天24小時連續追蹤觀測每一顆衛星並將每一秒半之虛擬距離接收量及接收
所得之氣象資料及電離層資料聯合求解得每15分鐘一個平滑資料然後將
資料傳送至主控站主控站即整合個監視站之資料計算衛星星曆衛星時鐘
改正量及電離層改正係數等並且將所得結果彙集成導航訊息傳遞到地面天
線處再由地面天線傳送到各衛星上以更新衛星內的資料如此衛星即
可傳送新的資料給使用者接收使用如圖2-4
11
圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

圖目錄
圖 1-1 車輛監控系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip2
圖 1-2 車輛監控系統基本架構圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip3
圖 2-1 全球衛星定位系統架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip9
圖 2-2 衛星分布圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip10
圖 2-3 地球赤道面的傾角helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip10
圖 2-4 地面控制站與衛星的示意圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip12
圖 2-5 GPS 接收器helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip13
圖 2-6 衛星訊號結構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip14
圖 2-7 虛擬距離時間測量helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip17
圖 2-8 GPS的誤差helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip18
圖 3-1 台灣地區 TM 座標系統helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21 02
圖 3-2 WGS84 橢圓座標helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip21
圖 3-3 座標轉換流程helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip22
圖 4-1 電路交換型態helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip26
圖 4-2 封包交換型態helliphelliphelliphelliphellip27
圖 4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式hellip28
圖 5-1 車輛管理系統之整體架構helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip29
圖 5-2 嵌入式移動車載平台的架構圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip31
圖 5-3 ARNUX 7511 實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip32
圖 5-4 BENQ M22 GSMGPRS Module實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphellip32
圖 5-5 GPS Module 實體圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip33
圖 5-6 程式流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip37
圖 5-7 主畫面程式流程圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip38
圖 5-8 即時監控主畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip39
V
圖 6-1 嵌入式移動車載系統實體全圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip40
圖 6-2 Linux 主機畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
圖 6-3 終端機初使化程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
圖 6-4 回傳中繼點訊號畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
圖 6-5 回傳終點訊號定位數據畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
圖 6-6 緊急狀況發生時畫面一helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
圖 6-7 緊急狀況發生時畫面二helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
圖 6-8 緊急狀況解除畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
圖 6-9 語音通話與結束畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
圖 6-10 Power Off 跳出執行畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
圖 6-11 監控台處於Listening狀態畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
圖 6-12 車載端透過GPRS登入監控台的畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
圖 6-13 監控台行車資訊紀錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
圖 6-14 台科大的電子資訊大樓helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
圖 6-15 實際路測圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
圖 6-16 地圖顯示出發點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip48
圖 6-17 地圖顯示中繼點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip48
圖 6-18 地圖顯示中繼點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip49
圖 6-19 地圖顯示緊急狀況發生時位置之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphellip49
圖 6-20 地圖顯示終點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip50
圖 6-21 監控台多人連線測試畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip51
VI
表目錄
表4-1 GSM與GPRS的比較helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip27
VII
第一章 緒論
11 研究動機
近年來由於網際網路的蓬勃發展使得人類日常生活中常常和網際網
路有著密切的關係在此同時無線通訊的技術也是日新月異行動電話的發
展也逐漸的進入成熟的階段故許多與網際網路結合的行動通訊產品也大量
的出現
由於網際網路傳輸快速且行動通訊具有高移動性及高涵蓋性的特
性再加上 GPS 全球定位系統精準的定位所以車輛的即時監控系統現
今已愈來愈普遍許多先進國家相繼發展智慧型車輛系統在其相關系統中
又以全球衛星定位系統(Global Positioning System GPS)[1] 和地理資訊系統
(Geographic Information System GIS) 系統發展最為進步其包含了自動車
輛定位技術(Automatic Vehicle Location AVL)[11]以及地理資訊的提供等
等其中汽車導航系統導航的方式是將裝在汽車上的 GPS 接收器所接收的
衛星定位資訊傳送到車中的電腦處理再將座標及行徑路徑顯示在電子地圖
上其精確度必須考量衛星定位的誤差以及電子地圖的精準度
由於衛星是處在相當高的運行軌道上其傳送的訊號是相當的微弱因
此它不像一般通訊無線電可在室內使用或收到訊號在使用時需在室外及天
空開闊度較佳之地方才能使用否則若大部份之衛星信號被建築物金屬遮
蓋物濃密樹林等所阻擋接收器將無法獲得足夠的衛星訊息來計算出所在
位置之座標故 GPS 在定位應用上並不適合建構於一般個人行動電話上的
定位應用本文所設計的系統並非針對個人用途的定位而是針對道路上車
輛的定位應用因為道路上遮蔽物較少不至於影響衛星定位功能
12 研究目的
本文中的車輛即時監控管理系統的架構如圖 1 包含以 ARM 7 為核心的
嵌入式移動平台無線通訊技術網路監控中心即是網路與行動通訊結合
1
GPS 全球定位系統的最佳組合其功能主要在於提供駕駛者行的安全方便
快速並非只是侷限於汽車的動態定位而是廣泛的包括定位與定位後的導
引在日本與歐美等先進國家已發展多年也有實際的成果展現在世人眼前
但是在台灣還是屬於剛起步的階段
因此本系統的開發必須先從定位及導航觀念為出發點並結合地理資訊
系統(GIS)才能夠達成目標
由於美國國防部所建立的全球衛星定位系統與地理資訊系統為車輛監
控系統之主要基礎因此本論文首先就GPS 及GIS 的基本理論先加以探
討再利用GPS 衛星接收器將所需的所在地地理資訊資料擷取下來經過
座標轉換的步驟將所在地的地理位資料與電子地圖作一結合分析形成汽
車監控系統的雛形
圖 1-1 車輛監控系統架構
本論文著重於嵌入式移動系統之實現進而結合監控台的功能來達成
車輛監控之目標嵌入式移動系統包含 GPS 全球衛星定位系統GSMGPRS
無線通訊模組ARM 7TDMI CPU 核心處理器等三大部分主要利用 ARM 7
進行控制透過 GPS 衛星定位器接收來自衛星的定位訊號再加上車輛
ID 與車輛狀況的描述後經由 GSMGPRS 模組把加工後的定位資料傳至
監控台讓管理者能隨時掌握車輛的一舉一動並於必要時與之聯繫了解
2
車輛運行狀況或進行新路線的派遣若是發生緊急狀況時也能全程錄音
即時監控
此監控系統可應用在即時車輛管理及車輛監控上並可將交通運輸推展
至智慧運輸系統上使得車輛使用能夠更加有效率及安全
13 系統簡介
車輛監控系統的特色在於不僅能夠非常有效的掌握車輛位置狀況即時
下達指令至車載 Client 端上經由即時監控中心即可觀測每一台車輛的行車
狀況與緊急情況而且監控系統非常大的好處在於低廉的通信費用
透過 GPS 接收器與 GPRS(General Packet Radio Service) 的無線通訊
網路可動態取得車輛所在位置資訊即時傳遞至監控台由監控台人員執
行車輛管理監控台與路線規劃的動作將所有派遣資訊即時傳遞至執行勤務
的運送人員依據監控台指令完成遞送工作
監控台此時扮演更重要的溝通聯繫角色可以彙總即時路況資訊傳
遞綜合研判的行車動向指令協助線上動態運行的車輛獲得即時的行車指
南車輛上所裝置的嵌入式移動系統亦可依車輛運作狀況在發生緊急事件
時於監控台可獲得最即時的數據資料例如車輛故障之拖救服務交通事
故發生時之速度數據舉證等等車輛監控系統之基本架構圖如圖 1-2 所示
圖 1-2 車輛監控系統基本架構圖[10]
3
14 論文回顧
GPS 與 GIS 的發展已有相當的一段時間無論在期刊文獻論文各
方面都有許多的研究與探討我們特別針對 GPS 與 GIS 結合在汽車監控部
分加以提出做為研究的基礎
世界上已有許多國家早在多年前即實際的進行有關汽車導航系統開發
與研究像加拿大的 Calgary 大學所研發的 AVL2000 即為一個非常成功的
例子[2]~[6]
根據相關的文獻研究目前仍在繼續發展及改進的帶路系統共有 40 餘
種之多而且已從第一代的〝Where am I〞獨立系統(AutonomousStand alone
system)及第二代的〝Where are You〞快速傳遞系統(Dispatch system)和加入
了道路資訊或導引系統的第三代〝How do I get there〞發展到現在的智慧型
帶路系統[2][7]
由於在過去的文獻中如文獻[8][9]車輛的位置透過 GPS 接收完衛星
訊號之後是藉由 GSM 的簡訊發送系統來傳送 GPS 的定位資訊但是由
於很多因素如 GSM 基地台塞機塞車行動通訊模組暫時不在接收範圍內
網路傳輸品質不穩定如傳輸速度較慢或者行動電話記憶體滿了使得簡訊
遺失造成車輛的定位無法作一個即時的回報因此在車輛的監控方面將會
造成很大的缺失又因發送簡訊的時間是有時間間距的至少間距五分鐘以
上如果發生緊急狀況時就無法立即作一個很好的處置又因簡訊是以傳
送的封數來計算如此監控的花費將會非常大
由於 GPS 現今已經發展的非常成熟了所以有越來越多的導航系統
會跟 GPS 來做結合如文獻[10]~[14]以 electronic road pricing (ERP) system
電子收費系統文獻[14]來說結合 GPS 全球衛星定位系統就是一個非常創新
的想法使用 GPS 科技來做結合不只可以非常有效率划算但是它
必須透過公路上所架設固定的跨軌訊號杆來做資訊的傳送對於監控就比
4
較沒有效率了所以本文將會針對即時的監控以及車輛的防護安全作一
個完善的改進
隨著人類追求產品的服務功能與品質的提昇要求迅速以及智慧型功能
的增進相信更進步的汽車監控系統不久將會展現於世人的面前
15 論文組織及概觀
本篇論文總共分為六個章節概要分述如下
第一章說明本論文的研究動機與目的並對文中所用到的理論架構以及
介紹作一概略性的敘述
第二章針對整個 GPS 發展概況系統架構衛星訊號結構與訊號格式
定位原理GPS 誤差分析做一個詳細的介紹
第三章針對整個 GIS 地理資訊發展情況電子地圖的介紹以及衛星座
標系統轉換做一個詳細的介紹
第四章針對無線通訊 GPRS 網路的發展方式作一個詳盡的介紹
第五章介紹車輛監控系統的整體架構嵌入式移動車載系統的硬體架構設
計嵌入式移動系統韌體程式結構與流程以及即時監控程式與系
統的介紹
第六章操作說明與實驗結果討論說明實驗的程序實際道路路況測試
與實際的汽車導航操作
第七章結論與未來展望總結本論文的研究成果並說明未來應用的方向以
及其發展性
5
第二章 GPS 全球衛星定位系統分析
21 GPS 發展概況
所謂 GPS 是全球衛星定位系統(Global Position System)簡稱為美國國防
部為軍事上定位及導航目的所發展的GPS 可以極準確地提供七種定位所需
的訊息三度空間位置三度空間的速度以及時間因為它的全天候高
準確定位的特性不但成功地應用在現代軍事化設備上而且在民間用途方
面也因其實用潛力雄厚而深受矚目而 GPS 的優越性能已漸漸應用於各
方面例如船艦及飛機的導航定位可以在瞬間獲得位置及速度的數值
港灣內將導航及追蹤結合以減少碰撞的可能性增加航道安全性的管理
油井鑽勘平台的定位礦產源位置的定位飛彈上的導航航空海上陸
地之測量等等都應為有 GPS 的加入而更趨於完善的目標
211 GPS 的緣起
1958 年 12 月美國海軍武器實驗室開始建立為美國海軍軍艦導航服務
的衛星系統即「海軍導航衛星系統」(Navy Navigation Satellite System
NNSS)此系統中衛星運行的軌道大多通過地球南北極因此也稱為「子午
(Transit)衛星系統」1964 年該系統建構完成提供美國軍方使用1967
年 7 月 29 日美國政府宣佈將該系統解密並提供民間使用為衛星定位系
統運用的開始
由於該系統不受氣候條件影響自動化程度較高且具有良好的定位精
度所以解密之後立即引起各方學者的研究與應用雖然 NNSS 把導航技術
的發展推向另一個新時代但由於該系統的衛星數量較少(5-6 顆)衛星運
轉的高度較低(平均運行高度約 1000km)從地面站觀測到衛星的時間間隔
較長(平均約 15 小時)因而無法提供連續的三維導航且獲得一次導航
求解所需的時間較長無法滿足軍事方面(由其是高速飛行目標如飛機
6
導彈)導航需求
於是美國國防部為軍事定時定位與導航目的將美國海軍所開發的
TIMATION(Time And Navigation)系統和美國空軍的 621B 兩個專案予以合
併後並改名為「全球衛星定位系統」(NAVSTARGPSNavigation Satellite
Timing And RangingGlobal Positioning System直接簡稱為 GPS)希望能
以衛星導航為基礎的技術可構成主要的無線電導航系統滿足各方面科技的
應用
212 GPS 的發展
全球定位系統所使用的衛星稱為 NAVSTAR第一顆 GPS 衛星於 1978
年 2 月 22 日發射GPS 為美國繼阿波羅登月與太空梭發展計劃後的第三大
太空國防計劃此一計劃係利用 GPS 衛星發射電波訊號以提供定時定位
及導航使用其精確度極高且不受電波干擾及時間地點和天候的影響
提供使用者全天候即時的位置與時間資訊所能達到的精度較以往的導航
及測量方法都來得高
在 1993 年 12 月 8 日第 24 顆 GPS 衛星進入太空軌道運行後GPS 已達
到初步操作能力(Initial Operational CapabilityIOC)24 顆 GPS 衛星(包
含初期測試用的 Block I 與量產型 Block IIIIA)提供全世界 24 小時全天候定
位與導航資訊
美國空軍太空司令部(US Air Force Space CommandAFSC)於 1995
年 4 月 27 日宣布 GPS 已達到完整操作能力(Full Operational Capability
FOC)將 IOC 中的 Block I 衛星加以汰換24 顆衛星全部為 Block IIIIA 衛
星所組成成功地滿足軍事實務的操作
GPS 衛星佈署在離地球表面約 20200 公里上空的圓形軌道上採圓形
軌道的目的在於可增大地面可見範圍及增強全球均勻覆蓋它們平均分佈於
7
6 個軌道面上每個軌道面上各有 4 顆呈 55deg 角傾斜繞行地球運轉每
11 小時 58 分繞行地球一周不論任何時間地點同時至少有 4 顆以上的
衛星出現在我們的上空
由於 GPS 的運用技術迅速發展使得民間的應用需求與日俱增對傳
統導航方式更有革命性的影響
由於 GPS 操作簡便迅速成果精確其用途甚為廣泛除軍事用途外
更大量運用在民用航空航海車輛控制油源探測大氣地球科學等
特別是協助交通運輸環境生態森林地質等資訊之調查管理與土地測
量等目前國內外已大量在汽車上安裝 GPS 接收儀並配合電子地圖以幫
助駕駛者找到捷運及目的地同時如徒步登山及狩獵者亦可利用 GPS 提
供方位不致迷失我們可以肯定一點日後 GPS 在航電國防交通甚至
日常生活都將佔有非常重要的地位
213 GPS 的應用
一陸地應用
(一) 大地測量國家及區域控制網建立精密工程測量
(二) 測量及製圖地籍測量地理資訊系統之資料測量工程測量
(三) 交通路網圖繪製
(四) 地球動力研究與變形監測
(五) 高精度時間比對
(六) 陸上導航支援緊急車輛(警車救護車消防保全等)車輛
監控派遣(計程車危險性車輛貨櫃運輸火車等)
(七) 森林巡視員之搜救任務如登山意外事故山崩雪崩等
(八) 森林資源管理
8
二空中應用
(一) 機場精密進場著陸國內線國際線民航機及直昇機導航
(二)空中交通管制作業
(三) 航空攝影測量導引與控制空中重力及磁力測量之定位
(四)農藥噴灑
(五)休閒娛樂滑翔機飛行傘輕航機等
22 GPS 系統架構
全球衛星定位系統(GPS)只要是利用接收衛星軌道資料求解出衛星所在
位置再計算出接收器本身與衛星間的距離以求出GPS接收器的位置因
此全球定位系統是一套不受地點時間與天候影響的高精度定位系統
全球衛星定位系統架構可分為三大部份[15]太空部份( the space
segment)控制部份(the control segment)及使用者部份(the user segment)
圖 2-1 全球衛星定位系統架構[15]
221 太空部份(the space segment)
GPS 系統之太空部份針對運行的衛星本體而言目前係由 24 顆操作衛
9
星及 3 顆備用衛星所組成三顆備用衛星的功能主要在作為衛星失效時之備
用及加強衛星之幾何分佈在平時這些衛星也可用於定位故為主動預備
(active spare)方式運作
27 顆分佈於 6 個軌道面上如圖 2-2[1]衛星軌道相對地球赤道面的傾角
為 55deg如圖 2-3每個軌道面上至少分佈有 4 顆衛星軌道面與另一軌道面
上的衛星則相差 40deg衛星高度為 20200 公里每 11 小時 58 分繞行地球一
周這樣可以讓使用者在全球各地任何時刻都可以同時觀測到 4 顆以上的衛
星以利實施三度空間之定位測量
圖 2-2 衛星分布圖[1]
圖 2-3 地球赤道面的傾角[1]
10
222 控制部份(the control segment)
對於 GPS 導航定位而言GPS 衛星是一動態的已知點它是依據衛星
傳送的星曆計算而得所謂衛星星曆即是一系列描述衛星運動及其軌道的參
數每顆 GPS 衛星所傳送的星曆皆由 GPS 的地面監控系統所提供
衛星進入軌道運行之後其各種設備是否正常運作是否依預定軌道運
行等皆需要由地面設備來進行監測和控制
此外地面監控系統還有一個重要的工作就是保持各衛星處於同一時
間標準(即 GPS 時間系統)因此由地面監控系統監測各衛星的時間計
算它們的有關正數進而將導航訊息傳送給用戶以確保處於 GPS 時系
GPS 之操縱控制部分已於 1985 年 9 月完成整個控制部分包括了一個
主控站三個地面控制站五個監測站而五個監測站中的三個(Ascension
IslandDiego GarciaKwajalein)為地面控制站其擁有專有的地面天線
主控站位於美國科羅拉多州之 Springs主要功能為彙整監測站所蒐集
的資料並計算衛星的軌道與時間參數之後做軌道平滑處理並將資料傳送
至地面控制站然後在藉由監控站專用天線將資料上傳至衛星除此之外
衛星的控制與操作皆為主控站的主要任務
每個監測站均擁有一個GPS雙頻接收機標準銫原子鐘感測器及資料
處理機其座標都是經過美國國防製圖局精密測量而得每個監測站必須每
天24小時連續追蹤觀測每一顆衛星並將每一秒半之虛擬距離接收量及接收
所得之氣象資料及電離層資料聯合求解得每15分鐘一個平滑資料然後將
資料傳送至主控站主控站即整合個監視站之資料計算衛星星曆衛星時鐘
改正量及電離層改正係數等並且將所得結果彙集成導航訊息傳遞到地面天
線處再由地面天線傳送到各衛星上以更新衛星內的資料如此衛星即
可傳送新的資料給使用者接收使用如圖2-4
11
圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

圖 6-1 嵌入式移動車載系統實體全圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip40
圖 6-2 Linux 主機畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
圖 6-3 終端機初使化程式helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip41
圖 6-4 回傳中繼點訊號畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
圖 6-5 回傳終點訊號定位數據畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip42
圖 6-6 緊急狀況發生時畫面一helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
圖 6-7 緊急狀況發生時畫面二helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip43
圖 6-8 緊急狀況解除畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
圖 6-9 語音通話與結束畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip44
圖 6-10 Power Off 跳出執行畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
圖 6-11 監控台處於Listening狀態畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip45
圖 6-12 車載端透過GPRS登入監控台的畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
圖 6-13 監控台行車資訊紀錄helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip46
圖 6-14 台科大的電子資訊大樓helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
圖 6-15 實際路測圖helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip47
圖 6-16 地圖顯示出發點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip48
圖 6-17 地圖顯示中繼點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip48
圖 6-18 地圖顯示中繼點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip49
圖 6-19 地圖顯示緊急狀況發生時位置之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphellip49
圖 6-20 地圖顯示終點之畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip50
圖 6-21 監控台多人連線測試畫面helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip51
VI
表目錄
表4-1 GSM與GPRS的比較helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip27
VII
第一章 緒論
11 研究動機
近年來由於網際網路的蓬勃發展使得人類日常生活中常常和網際網
路有著密切的關係在此同時無線通訊的技術也是日新月異行動電話的發
展也逐漸的進入成熟的階段故許多與網際網路結合的行動通訊產品也大量
的出現
由於網際網路傳輸快速且行動通訊具有高移動性及高涵蓋性的特
性再加上 GPS 全球定位系統精準的定位所以車輛的即時監控系統現
今已愈來愈普遍許多先進國家相繼發展智慧型車輛系統在其相關系統中
又以全球衛星定位系統(Global Positioning System GPS)[1] 和地理資訊系統
(Geographic Information System GIS) 系統發展最為進步其包含了自動車
輛定位技術(Automatic Vehicle Location AVL)[11]以及地理資訊的提供等
等其中汽車導航系統導航的方式是將裝在汽車上的 GPS 接收器所接收的
衛星定位資訊傳送到車中的電腦處理再將座標及行徑路徑顯示在電子地圖
上其精確度必須考量衛星定位的誤差以及電子地圖的精準度
由於衛星是處在相當高的運行軌道上其傳送的訊號是相當的微弱因
此它不像一般通訊無線電可在室內使用或收到訊號在使用時需在室外及天
空開闊度較佳之地方才能使用否則若大部份之衛星信號被建築物金屬遮
蓋物濃密樹林等所阻擋接收器將無法獲得足夠的衛星訊息來計算出所在
位置之座標故 GPS 在定位應用上並不適合建構於一般個人行動電話上的
定位應用本文所設計的系統並非針對個人用途的定位而是針對道路上車
輛的定位應用因為道路上遮蔽物較少不至於影響衛星定位功能
12 研究目的
本文中的車輛即時監控管理系統的架構如圖 1 包含以 ARM 7 為核心的
嵌入式移動平台無線通訊技術網路監控中心即是網路與行動通訊結合
1
GPS 全球定位系統的最佳組合其功能主要在於提供駕駛者行的安全方便
快速並非只是侷限於汽車的動態定位而是廣泛的包括定位與定位後的導
引在日本與歐美等先進國家已發展多年也有實際的成果展現在世人眼前
但是在台灣還是屬於剛起步的階段
因此本系統的開發必須先從定位及導航觀念為出發點並結合地理資訊
系統(GIS)才能夠達成目標
由於美國國防部所建立的全球衛星定位系統與地理資訊系統為車輛監
控系統之主要基礎因此本論文首先就GPS 及GIS 的基本理論先加以探
討再利用GPS 衛星接收器將所需的所在地地理資訊資料擷取下來經過
座標轉換的步驟將所在地的地理位資料與電子地圖作一結合分析形成汽
車監控系統的雛形
圖 1-1 車輛監控系統架構
本論文著重於嵌入式移動系統之實現進而結合監控台的功能來達成
車輛監控之目標嵌入式移動系統包含 GPS 全球衛星定位系統GSMGPRS
無線通訊模組ARM 7TDMI CPU 核心處理器等三大部分主要利用 ARM 7
進行控制透過 GPS 衛星定位器接收來自衛星的定位訊號再加上車輛
ID 與車輛狀況的描述後經由 GSMGPRS 模組把加工後的定位資料傳至
監控台讓管理者能隨時掌握車輛的一舉一動並於必要時與之聯繫了解
2
車輛運行狀況或進行新路線的派遣若是發生緊急狀況時也能全程錄音
即時監控
此監控系統可應用在即時車輛管理及車輛監控上並可將交通運輸推展
至智慧運輸系統上使得車輛使用能夠更加有效率及安全
13 系統簡介
車輛監控系統的特色在於不僅能夠非常有效的掌握車輛位置狀況即時
下達指令至車載 Client 端上經由即時監控中心即可觀測每一台車輛的行車
狀況與緊急情況而且監控系統非常大的好處在於低廉的通信費用
透過 GPS 接收器與 GPRS(General Packet Radio Service) 的無線通訊
網路可動態取得車輛所在位置資訊即時傳遞至監控台由監控台人員執
行車輛管理監控台與路線規劃的動作將所有派遣資訊即時傳遞至執行勤務
的運送人員依據監控台指令完成遞送工作
監控台此時扮演更重要的溝通聯繫角色可以彙總即時路況資訊傳
遞綜合研判的行車動向指令協助線上動態運行的車輛獲得即時的行車指
南車輛上所裝置的嵌入式移動系統亦可依車輛運作狀況在發生緊急事件
時於監控台可獲得最即時的數據資料例如車輛故障之拖救服務交通事
故發生時之速度數據舉證等等車輛監控系統之基本架構圖如圖 1-2 所示
圖 1-2 車輛監控系統基本架構圖[10]
3
14 論文回顧
GPS 與 GIS 的發展已有相當的一段時間無論在期刊文獻論文各
方面都有許多的研究與探討我們特別針對 GPS 與 GIS 結合在汽車監控部
分加以提出做為研究的基礎
世界上已有許多國家早在多年前即實際的進行有關汽車導航系統開發
與研究像加拿大的 Calgary 大學所研發的 AVL2000 即為一個非常成功的
例子[2]~[6]
根據相關的文獻研究目前仍在繼續發展及改進的帶路系統共有 40 餘
種之多而且已從第一代的〝Where am I〞獨立系統(AutonomousStand alone
system)及第二代的〝Where are You〞快速傳遞系統(Dispatch system)和加入
了道路資訊或導引系統的第三代〝How do I get there〞發展到現在的智慧型
帶路系統[2][7]
由於在過去的文獻中如文獻[8][9]車輛的位置透過 GPS 接收完衛星
訊號之後是藉由 GSM 的簡訊發送系統來傳送 GPS 的定位資訊但是由
於很多因素如 GSM 基地台塞機塞車行動通訊模組暫時不在接收範圍內
網路傳輸品質不穩定如傳輸速度較慢或者行動電話記憶體滿了使得簡訊
遺失造成車輛的定位無法作一個即時的回報因此在車輛的監控方面將會
造成很大的缺失又因發送簡訊的時間是有時間間距的至少間距五分鐘以
上如果發生緊急狀況時就無法立即作一個很好的處置又因簡訊是以傳
送的封數來計算如此監控的花費將會非常大
由於 GPS 現今已經發展的非常成熟了所以有越來越多的導航系統
會跟 GPS 來做結合如文獻[10]~[14]以 electronic road pricing (ERP) system
電子收費系統文獻[14]來說結合 GPS 全球衛星定位系統就是一個非常創新
的想法使用 GPS 科技來做結合不只可以非常有效率划算但是它
必須透過公路上所架設固定的跨軌訊號杆來做資訊的傳送對於監控就比
4
較沒有效率了所以本文將會針對即時的監控以及車輛的防護安全作一
個完善的改進
隨著人類追求產品的服務功能與品質的提昇要求迅速以及智慧型功能
的增進相信更進步的汽車監控系統不久將會展現於世人的面前
15 論文組織及概觀
本篇論文總共分為六個章節概要分述如下
第一章說明本論文的研究動機與目的並對文中所用到的理論架構以及
介紹作一概略性的敘述
第二章針對整個 GPS 發展概況系統架構衛星訊號結構與訊號格式
定位原理GPS 誤差分析做一個詳細的介紹
第三章針對整個 GIS 地理資訊發展情況電子地圖的介紹以及衛星座
標系統轉換做一個詳細的介紹
第四章針對無線通訊 GPRS 網路的發展方式作一個詳盡的介紹
第五章介紹車輛監控系統的整體架構嵌入式移動車載系統的硬體架構設
計嵌入式移動系統韌體程式結構與流程以及即時監控程式與系
統的介紹
第六章操作說明與實驗結果討論說明實驗的程序實際道路路況測試
與實際的汽車導航操作
第七章結論與未來展望總結本論文的研究成果並說明未來應用的方向以
及其發展性
5
第二章 GPS 全球衛星定位系統分析
21 GPS 發展概況
所謂 GPS 是全球衛星定位系統(Global Position System)簡稱為美國國防
部為軍事上定位及導航目的所發展的GPS 可以極準確地提供七種定位所需
的訊息三度空間位置三度空間的速度以及時間因為它的全天候高
準確定位的特性不但成功地應用在現代軍事化設備上而且在民間用途方
面也因其實用潛力雄厚而深受矚目而 GPS 的優越性能已漸漸應用於各
方面例如船艦及飛機的導航定位可以在瞬間獲得位置及速度的數值
港灣內將導航及追蹤結合以減少碰撞的可能性增加航道安全性的管理
油井鑽勘平台的定位礦產源位置的定位飛彈上的導航航空海上陸
地之測量等等都應為有 GPS 的加入而更趨於完善的目標
211 GPS 的緣起
1958 年 12 月美國海軍武器實驗室開始建立為美國海軍軍艦導航服務
的衛星系統即「海軍導航衛星系統」(Navy Navigation Satellite System
NNSS)此系統中衛星運行的軌道大多通過地球南北極因此也稱為「子午
(Transit)衛星系統」1964 年該系統建構完成提供美國軍方使用1967
年 7 月 29 日美國政府宣佈將該系統解密並提供民間使用為衛星定位系
統運用的開始
由於該系統不受氣候條件影響自動化程度較高且具有良好的定位精
度所以解密之後立即引起各方學者的研究與應用雖然 NNSS 把導航技術
的發展推向另一個新時代但由於該系統的衛星數量較少(5-6 顆)衛星運
轉的高度較低(平均運行高度約 1000km)從地面站觀測到衛星的時間間隔
較長(平均約 15 小時)因而無法提供連續的三維導航且獲得一次導航
求解所需的時間較長無法滿足軍事方面(由其是高速飛行目標如飛機
6
導彈)導航需求
於是美國國防部為軍事定時定位與導航目的將美國海軍所開發的
TIMATION(Time And Navigation)系統和美國空軍的 621B 兩個專案予以合
併後並改名為「全球衛星定位系統」(NAVSTARGPSNavigation Satellite
Timing And RangingGlobal Positioning System直接簡稱為 GPS)希望能
以衛星導航為基礎的技術可構成主要的無線電導航系統滿足各方面科技的
應用
212 GPS 的發展
全球定位系統所使用的衛星稱為 NAVSTAR第一顆 GPS 衛星於 1978
年 2 月 22 日發射GPS 為美國繼阿波羅登月與太空梭發展計劃後的第三大
太空國防計劃此一計劃係利用 GPS 衛星發射電波訊號以提供定時定位
及導航使用其精確度極高且不受電波干擾及時間地點和天候的影響
提供使用者全天候即時的位置與時間資訊所能達到的精度較以往的導航
及測量方法都來得高
在 1993 年 12 月 8 日第 24 顆 GPS 衛星進入太空軌道運行後GPS 已達
到初步操作能力(Initial Operational CapabilityIOC)24 顆 GPS 衛星(包
含初期測試用的 Block I 與量產型 Block IIIIA)提供全世界 24 小時全天候定
位與導航資訊
美國空軍太空司令部(US Air Force Space CommandAFSC)於 1995
年 4 月 27 日宣布 GPS 已達到完整操作能力(Full Operational Capability
FOC)將 IOC 中的 Block I 衛星加以汰換24 顆衛星全部為 Block IIIIA 衛
星所組成成功地滿足軍事實務的操作
GPS 衛星佈署在離地球表面約 20200 公里上空的圓形軌道上採圓形
軌道的目的在於可增大地面可見範圍及增強全球均勻覆蓋它們平均分佈於
7
6 個軌道面上每個軌道面上各有 4 顆呈 55deg 角傾斜繞行地球運轉每
11 小時 58 分繞行地球一周不論任何時間地點同時至少有 4 顆以上的
衛星出現在我們的上空
由於 GPS 的運用技術迅速發展使得民間的應用需求與日俱增對傳
統導航方式更有革命性的影響
由於 GPS 操作簡便迅速成果精確其用途甚為廣泛除軍事用途外
更大量運用在民用航空航海車輛控制油源探測大氣地球科學等
特別是協助交通運輸環境生態森林地質等資訊之調查管理與土地測
量等目前國內外已大量在汽車上安裝 GPS 接收儀並配合電子地圖以幫
助駕駛者找到捷運及目的地同時如徒步登山及狩獵者亦可利用 GPS 提
供方位不致迷失我們可以肯定一點日後 GPS 在航電國防交通甚至
日常生活都將佔有非常重要的地位
213 GPS 的應用
一陸地應用
(一) 大地測量國家及區域控制網建立精密工程測量
(二) 測量及製圖地籍測量地理資訊系統之資料測量工程測量
(三) 交通路網圖繪製
(四) 地球動力研究與變形監測
(五) 高精度時間比對
(六) 陸上導航支援緊急車輛(警車救護車消防保全等)車輛
監控派遣(計程車危險性車輛貨櫃運輸火車等)
(七) 森林巡視員之搜救任務如登山意外事故山崩雪崩等
(八) 森林資源管理
8
二空中應用
(一) 機場精密進場著陸國內線國際線民航機及直昇機導航
(二)空中交通管制作業
(三) 航空攝影測量導引與控制空中重力及磁力測量之定位
(四)農藥噴灑
(五)休閒娛樂滑翔機飛行傘輕航機等
22 GPS 系統架構
全球衛星定位系統(GPS)只要是利用接收衛星軌道資料求解出衛星所在
位置再計算出接收器本身與衛星間的距離以求出GPS接收器的位置因
此全球定位系統是一套不受地點時間與天候影響的高精度定位系統
全球衛星定位系統架構可分為三大部份[15]太空部份( the space
segment)控制部份(the control segment)及使用者部份(the user segment)
圖 2-1 全球衛星定位系統架構[15]
221 太空部份(the space segment)
GPS 系統之太空部份針對運行的衛星本體而言目前係由 24 顆操作衛
9
星及 3 顆備用衛星所組成三顆備用衛星的功能主要在作為衛星失效時之備
用及加強衛星之幾何分佈在平時這些衛星也可用於定位故為主動預備
(active spare)方式運作
27 顆分佈於 6 個軌道面上如圖 2-2[1]衛星軌道相對地球赤道面的傾角
為 55deg如圖 2-3每個軌道面上至少分佈有 4 顆衛星軌道面與另一軌道面
上的衛星則相差 40deg衛星高度為 20200 公里每 11 小時 58 分繞行地球一
周這樣可以讓使用者在全球各地任何時刻都可以同時觀測到 4 顆以上的衛
星以利實施三度空間之定位測量
圖 2-2 衛星分布圖[1]
圖 2-3 地球赤道面的傾角[1]
10
222 控制部份(the control segment)
對於 GPS 導航定位而言GPS 衛星是一動態的已知點它是依據衛星
傳送的星曆計算而得所謂衛星星曆即是一系列描述衛星運動及其軌道的參
數每顆 GPS 衛星所傳送的星曆皆由 GPS 的地面監控系統所提供
衛星進入軌道運行之後其各種設備是否正常運作是否依預定軌道運
行等皆需要由地面設備來進行監測和控制
此外地面監控系統還有一個重要的工作就是保持各衛星處於同一時
間標準(即 GPS 時間系統)因此由地面監控系統監測各衛星的時間計
算它們的有關正數進而將導航訊息傳送給用戶以確保處於 GPS 時系
GPS 之操縱控制部分已於 1985 年 9 月完成整個控制部分包括了一個
主控站三個地面控制站五個監測站而五個監測站中的三個(Ascension
IslandDiego GarciaKwajalein)為地面控制站其擁有專有的地面天線
主控站位於美國科羅拉多州之 Springs主要功能為彙整監測站所蒐集
的資料並計算衛星的軌道與時間參數之後做軌道平滑處理並將資料傳送
至地面控制站然後在藉由監控站專用天線將資料上傳至衛星除此之外
衛星的控制與操作皆為主控站的主要任務
每個監測站均擁有一個GPS雙頻接收機標準銫原子鐘感測器及資料
處理機其座標都是經過美國國防製圖局精密測量而得每個監測站必須每
天24小時連續追蹤觀測每一顆衛星並將每一秒半之虛擬距離接收量及接收
所得之氣象資料及電離層資料聯合求解得每15分鐘一個平滑資料然後將
資料傳送至主控站主控站即整合個監視站之資料計算衛星星曆衛星時鐘
改正量及電離層改正係數等並且將所得結果彙集成導航訊息傳遞到地面天
線處再由地面天線傳送到各衛星上以更新衛星內的資料如此衛星即
可傳送新的資料給使用者接收使用如圖2-4
11
圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

表目錄
表4-1 GSM與GPRS的比較helliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphelliphellip27
VII
第一章 緒論
11 研究動機
近年來由於網際網路的蓬勃發展使得人類日常生活中常常和網際網
路有著密切的關係在此同時無線通訊的技術也是日新月異行動電話的發
展也逐漸的進入成熟的階段故許多與網際網路結合的行動通訊產品也大量
的出現
由於網際網路傳輸快速且行動通訊具有高移動性及高涵蓋性的特
性再加上 GPS 全球定位系統精準的定位所以車輛的即時監控系統現
今已愈來愈普遍許多先進國家相繼發展智慧型車輛系統在其相關系統中
又以全球衛星定位系統(Global Positioning System GPS)[1] 和地理資訊系統
(Geographic Information System GIS) 系統發展最為進步其包含了自動車
輛定位技術(Automatic Vehicle Location AVL)[11]以及地理資訊的提供等
等其中汽車導航系統導航的方式是將裝在汽車上的 GPS 接收器所接收的
衛星定位資訊傳送到車中的電腦處理再將座標及行徑路徑顯示在電子地圖
上其精確度必須考量衛星定位的誤差以及電子地圖的精準度
由於衛星是處在相當高的運行軌道上其傳送的訊號是相當的微弱因
此它不像一般通訊無線電可在室內使用或收到訊號在使用時需在室外及天
空開闊度較佳之地方才能使用否則若大部份之衛星信號被建築物金屬遮
蓋物濃密樹林等所阻擋接收器將無法獲得足夠的衛星訊息來計算出所在
位置之座標故 GPS 在定位應用上並不適合建構於一般個人行動電話上的
定位應用本文所設計的系統並非針對個人用途的定位而是針對道路上車
輛的定位應用因為道路上遮蔽物較少不至於影響衛星定位功能
12 研究目的
本文中的車輛即時監控管理系統的架構如圖 1 包含以 ARM 7 為核心的
嵌入式移動平台無線通訊技術網路監控中心即是網路與行動通訊結合
1
GPS 全球定位系統的最佳組合其功能主要在於提供駕駛者行的安全方便
快速並非只是侷限於汽車的動態定位而是廣泛的包括定位與定位後的導
引在日本與歐美等先進國家已發展多年也有實際的成果展現在世人眼前
但是在台灣還是屬於剛起步的階段
因此本系統的開發必須先從定位及導航觀念為出發點並結合地理資訊
系統(GIS)才能夠達成目標
由於美國國防部所建立的全球衛星定位系統與地理資訊系統為車輛監
控系統之主要基礎因此本論文首先就GPS 及GIS 的基本理論先加以探
討再利用GPS 衛星接收器將所需的所在地地理資訊資料擷取下來經過
座標轉換的步驟將所在地的地理位資料與電子地圖作一結合分析形成汽
車監控系統的雛形
圖 1-1 車輛監控系統架構
本論文著重於嵌入式移動系統之實現進而結合監控台的功能來達成
車輛監控之目標嵌入式移動系統包含 GPS 全球衛星定位系統GSMGPRS
無線通訊模組ARM 7TDMI CPU 核心處理器等三大部分主要利用 ARM 7
進行控制透過 GPS 衛星定位器接收來自衛星的定位訊號再加上車輛
ID 與車輛狀況的描述後經由 GSMGPRS 模組把加工後的定位資料傳至
監控台讓管理者能隨時掌握車輛的一舉一動並於必要時與之聯繫了解
2
車輛運行狀況或進行新路線的派遣若是發生緊急狀況時也能全程錄音
即時監控
此監控系統可應用在即時車輛管理及車輛監控上並可將交通運輸推展
至智慧運輸系統上使得車輛使用能夠更加有效率及安全
13 系統簡介
車輛監控系統的特色在於不僅能夠非常有效的掌握車輛位置狀況即時
下達指令至車載 Client 端上經由即時監控中心即可觀測每一台車輛的行車
狀況與緊急情況而且監控系統非常大的好處在於低廉的通信費用
透過 GPS 接收器與 GPRS(General Packet Radio Service) 的無線通訊
網路可動態取得車輛所在位置資訊即時傳遞至監控台由監控台人員執
行車輛管理監控台與路線規劃的動作將所有派遣資訊即時傳遞至執行勤務
的運送人員依據監控台指令完成遞送工作
監控台此時扮演更重要的溝通聯繫角色可以彙總即時路況資訊傳
遞綜合研判的行車動向指令協助線上動態運行的車輛獲得即時的行車指
南車輛上所裝置的嵌入式移動系統亦可依車輛運作狀況在發生緊急事件
時於監控台可獲得最即時的數據資料例如車輛故障之拖救服務交通事
故發生時之速度數據舉證等等車輛監控系統之基本架構圖如圖 1-2 所示
圖 1-2 車輛監控系統基本架構圖[10]
3
14 論文回顧
GPS 與 GIS 的發展已有相當的一段時間無論在期刊文獻論文各
方面都有許多的研究與探討我們特別針對 GPS 與 GIS 結合在汽車監控部
分加以提出做為研究的基礎
世界上已有許多國家早在多年前即實際的進行有關汽車導航系統開發
與研究像加拿大的 Calgary 大學所研發的 AVL2000 即為一個非常成功的
例子[2]~[6]
根據相關的文獻研究目前仍在繼續發展及改進的帶路系統共有 40 餘
種之多而且已從第一代的〝Where am I〞獨立系統(AutonomousStand alone
system)及第二代的〝Where are You〞快速傳遞系統(Dispatch system)和加入
了道路資訊或導引系統的第三代〝How do I get there〞發展到現在的智慧型
帶路系統[2][7]
由於在過去的文獻中如文獻[8][9]車輛的位置透過 GPS 接收完衛星
訊號之後是藉由 GSM 的簡訊發送系統來傳送 GPS 的定位資訊但是由
於很多因素如 GSM 基地台塞機塞車行動通訊模組暫時不在接收範圍內
網路傳輸品質不穩定如傳輸速度較慢或者行動電話記憶體滿了使得簡訊
遺失造成車輛的定位無法作一個即時的回報因此在車輛的監控方面將會
造成很大的缺失又因發送簡訊的時間是有時間間距的至少間距五分鐘以
上如果發生緊急狀況時就無法立即作一個很好的處置又因簡訊是以傳
送的封數來計算如此監控的花費將會非常大
由於 GPS 現今已經發展的非常成熟了所以有越來越多的導航系統
會跟 GPS 來做結合如文獻[10]~[14]以 electronic road pricing (ERP) system
電子收費系統文獻[14]來說結合 GPS 全球衛星定位系統就是一個非常創新
的想法使用 GPS 科技來做結合不只可以非常有效率划算但是它
必須透過公路上所架設固定的跨軌訊號杆來做資訊的傳送對於監控就比
4
較沒有效率了所以本文將會針對即時的監控以及車輛的防護安全作一
個完善的改進
隨著人類追求產品的服務功能與品質的提昇要求迅速以及智慧型功能
的增進相信更進步的汽車監控系統不久將會展現於世人的面前
15 論文組織及概觀
本篇論文總共分為六個章節概要分述如下
第一章說明本論文的研究動機與目的並對文中所用到的理論架構以及
介紹作一概略性的敘述
第二章針對整個 GPS 發展概況系統架構衛星訊號結構與訊號格式
定位原理GPS 誤差分析做一個詳細的介紹
第三章針對整個 GIS 地理資訊發展情況電子地圖的介紹以及衛星座
標系統轉換做一個詳細的介紹
第四章針對無線通訊 GPRS 網路的發展方式作一個詳盡的介紹
第五章介紹車輛監控系統的整體架構嵌入式移動車載系統的硬體架構設
計嵌入式移動系統韌體程式結構與流程以及即時監控程式與系
統的介紹
第六章操作說明與實驗結果討論說明實驗的程序實際道路路況測試
與實際的汽車導航操作
第七章結論與未來展望總結本論文的研究成果並說明未來應用的方向以
及其發展性
5
第二章 GPS 全球衛星定位系統分析
21 GPS 發展概況
所謂 GPS 是全球衛星定位系統(Global Position System)簡稱為美國國防
部為軍事上定位及導航目的所發展的GPS 可以極準確地提供七種定位所需
的訊息三度空間位置三度空間的速度以及時間因為它的全天候高
準確定位的特性不但成功地應用在現代軍事化設備上而且在民間用途方
面也因其實用潛力雄厚而深受矚目而 GPS 的優越性能已漸漸應用於各
方面例如船艦及飛機的導航定位可以在瞬間獲得位置及速度的數值
港灣內將導航及追蹤結合以減少碰撞的可能性增加航道安全性的管理
油井鑽勘平台的定位礦產源位置的定位飛彈上的導航航空海上陸
地之測量等等都應為有 GPS 的加入而更趨於完善的目標
211 GPS 的緣起
1958 年 12 月美國海軍武器實驗室開始建立為美國海軍軍艦導航服務
的衛星系統即「海軍導航衛星系統」(Navy Navigation Satellite System
NNSS)此系統中衛星運行的軌道大多通過地球南北極因此也稱為「子午
(Transit)衛星系統」1964 年該系統建構完成提供美國軍方使用1967
年 7 月 29 日美國政府宣佈將該系統解密並提供民間使用為衛星定位系
統運用的開始
由於該系統不受氣候條件影響自動化程度較高且具有良好的定位精
度所以解密之後立即引起各方學者的研究與應用雖然 NNSS 把導航技術
的發展推向另一個新時代但由於該系統的衛星數量較少(5-6 顆)衛星運
轉的高度較低(平均運行高度約 1000km)從地面站觀測到衛星的時間間隔
較長(平均約 15 小時)因而無法提供連續的三維導航且獲得一次導航
求解所需的時間較長無法滿足軍事方面(由其是高速飛行目標如飛機
6
導彈)導航需求
於是美國國防部為軍事定時定位與導航目的將美國海軍所開發的
TIMATION(Time And Navigation)系統和美國空軍的 621B 兩個專案予以合
併後並改名為「全球衛星定位系統」(NAVSTARGPSNavigation Satellite
Timing And RangingGlobal Positioning System直接簡稱為 GPS)希望能
以衛星導航為基礎的技術可構成主要的無線電導航系統滿足各方面科技的
應用
212 GPS 的發展
全球定位系統所使用的衛星稱為 NAVSTAR第一顆 GPS 衛星於 1978
年 2 月 22 日發射GPS 為美國繼阿波羅登月與太空梭發展計劃後的第三大
太空國防計劃此一計劃係利用 GPS 衛星發射電波訊號以提供定時定位
及導航使用其精確度極高且不受電波干擾及時間地點和天候的影響
提供使用者全天候即時的位置與時間資訊所能達到的精度較以往的導航
及測量方法都來得高
在 1993 年 12 月 8 日第 24 顆 GPS 衛星進入太空軌道運行後GPS 已達
到初步操作能力(Initial Operational CapabilityIOC)24 顆 GPS 衛星(包
含初期測試用的 Block I 與量產型 Block IIIIA)提供全世界 24 小時全天候定
位與導航資訊
美國空軍太空司令部(US Air Force Space CommandAFSC)於 1995
年 4 月 27 日宣布 GPS 已達到完整操作能力(Full Operational Capability
FOC)將 IOC 中的 Block I 衛星加以汰換24 顆衛星全部為 Block IIIIA 衛
星所組成成功地滿足軍事實務的操作
GPS 衛星佈署在離地球表面約 20200 公里上空的圓形軌道上採圓形
軌道的目的在於可增大地面可見範圍及增強全球均勻覆蓋它們平均分佈於
7
6 個軌道面上每個軌道面上各有 4 顆呈 55deg 角傾斜繞行地球運轉每
11 小時 58 分繞行地球一周不論任何時間地點同時至少有 4 顆以上的
衛星出現在我們的上空
由於 GPS 的運用技術迅速發展使得民間的應用需求與日俱增對傳
統導航方式更有革命性的影響
由於 GPS 操作簡便迅速成果精確其用途甚為廣泛除軍事用途外
更大量運用在民用航空航海車輛控制油源探測大氣地球科學等
特別是協助交通運輸環境生態森林地質等資訊之調查管理與土地測
量等目前國內外已大量在汽車上安裝 GPS 接收儀並配合電子地圖以幫
助駕駛者找到捷運及目的地同時如徒步登山及狩獵者亦可利用 GPS 提
供方位不致迷失我們可以肯定一點日後 GPS 在航電國防交通甚至
日常生活都將佔有非常重要的地位
213 GPS 的應用
一陸地應用
(一) 大地測量國家及區域控制網建立精密工程測量
(二) 測量及製圖地籍測量地理資訊系統之資料測量工程測量
(三) 交通路網圖繪製
(四) 地球動力研究與變形監測
(五) 高精度時間比對
(六) 陸上導航支援緊急車輛(警車救護車消防保全等)車輛
監控派遣(計程車危險性車輛貨櫃運輸火車等)
(七) 森林巡視員之搜救任務如登山意外事故山崩雪崩等
(八) 森林資源管理
8
二空中應用
(一) 機場精密進場著陸國內線國際線民航機及直昇機導航
(二)空中交通管制作業
(三) 航空攝影測量導引與控制空中重力及磁力測量之定位
(四)農藥噴灑
(五)休閒娛樂滑翔機飛行傘輕航機等
22 GPS 系統架構
全球衛星定位系統(GPS)只要是利用接收衛星軌道資料求解出衛星所在
位置再計算出接收器本身與衛星間的距離以求出GPS接收器的位置因
此全球定位系統是一套不受地點時間與天候影響的高精度定位系統
全球衛星定位系統架構可分為三大部份[15]太空部份( the space
segment)控制部份(the control segment)及使用者部份(the user segment)
圖 2-1 全球衛星定位系統架構[15]
221 太空部份(the space segment)
GPS 系統之太空部份針對運行的衛星本體而言目前係由 24 顆操作衛
9
星及 3 顆備用衛星所組成三顆備用衛星的功能主要在作為衛星失效時之備
用及加強衛星之幾何分佈在平時這些衛星也可用於定位故為主動預備
(active spare)方式運作
27 顆分佈於 6 個軌道面上如圖 2-2[1]衛星軌道相對地球赤道面的傾角
為 55deg如圖 2-3每個軌道面上至少分佈有 4 顆衛星軌道面與另一軌道面
上的衛星則相差 40deg衛星高度為 20200 公里每 11 小時 58 分繞行地球一
周這樣可以讓使用者在全球各地任何時刻都可以同時觀測到 4 顆以上的衛
星以利實施三度空間之定位測量
圖 2-2 衛星分布圖[1]
圖 2-3 地球赤道面的傾角[1]
10
222 控制部份(the control segment)
對於 GPS 導航定位而言GPS 衛星是一動態的已知點它是依據衛星
傳送的星曆計算而得所謂衛星星曆即是一系列描述衛星運動及其軌道的參
數每顆 GPS 衛星所傳送的星曆皆由 GPS 的地面監控系統所提供
衛星進入軌道運行之後其各種設備是否正常運作是否依預定軌道運
行等皆需要由地面設備來進行監測和控制
此外地面監控系統還有一個重要的工作就是保持各衛星處於同一時
間標準(即 GPS 時間系統)因此由地面監控系統監測各衛星的時間計
算它們的有關正數進而將導航訊息傳送給用戶以確保處於 GPS 時系
GPS 之操縱控制部分已於 1985 年 9 月完成整個控制部分包括了一個
主控站三個地面控制站五個監測站而五個監測站中的三個(Ascension
IslandDiego GarciaKwajalein)為地面控制站其擁有專有的地面天線
主控站位於美國科羅拉多州之 Springs主要功能為彙整監測站所蒐集
的資料並計算衛星的軌道與時間參數之後做軌道平滑處理並將資料傳送
至地面控制站然後在藉由監控站專用天線將資料上傳至衛星除此之外
衛星的控制與操作皆為主控站的主要任務
每個監測站均擁有一個GPS雙頻接收機標準銫原子鐘感測器及資料
處理機其座標都是經過美國國防製圖局精密測量而得每個監測站必須每
天24小時連續追蹤觀測每一顆衛星並將每一秒半之虛擬距離接收量及接收
所得之氣象資料及電離層資料聯合求解得每15分鐘一個平滑資料然後將
資料傳送至主控站主控站即整合個監視站之資料計算衛星星曆衛星時鐘
改正量及電離層改正係數等並且將所得結果彙集成導航訊息傳遞到地面天
線處再由地面天線傳送到各衛星上以更新衛星內的資料如此衛星即
可傳送新的資料給使用者接收使用如圖2-4
11
圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

第一章 緒論
11 研究動機
近年來由於網際網路的蓬勃發展使得人類日常生活中常常和網際網
路有著密切的關係在此同時無線通訊的技術也是日新月異行動電話的發
展也逐漸的進入成熟的階段故許多與網際網路結合的行動通訊產品也大量
的出現
由於網際網路傳輸快速且行動通訊具有高移動性及高涵蓋性的特
性再加上 GPS 全球定位系統精準的定位所以車輛的即時監控系統現
今已愈來愈普遍許多先進國家相繼發展智慧型車輛系統在其相關系統中
又以全球衛星定位系統(Global Positioning System GPS)[1] 和地理資訊系統
(Geographic Information System GIS) 系統發展最為進步其包含了自動車
輛定位技術(Automatic Vehicle Location AVL)[11]以及地理資訊的提供等
等其中汽車導航系統導航的方式是將裝在汽車上的 GPS 接收器所接收的
衛星定位資訊傳送到車中的電腦處理再將座標及行徑路徑顯示在電子地圖
上其精確度必須考量衛星定位的誤差以及電子地圖的精準度
由於衛星是處在相當高的運行軌道上其傳送的訊號是相當的微弱因
此它不像一般通訊無線電可在室內使用或收到訊號在使用時需在室外及天
空開闊度較佳之地方才能使用否則若大部份之衛星信號被建築物金屬遮
蓋物濃密樹林等所阻擋接收器將無法獲得足夠的衛星訊息來計算出所在
位置之座標故 GPS 在定位應用上並不適合建構於一般個人行動電話上的
定位應用本文所設計的系統並非針對個人用途的定位而是針對道路上車
輛的定位應用因為道路上遮蔽物較少不至於影響衛星定位功能
12 研究目的
本文中的車輛即時監控管理系統的架構如圖 1 包含以 ARM 7 為核心的
嵌入式移動平台無線通訊技術網路監控中心即是網路與行動通訊結合
1
GPS 全球定位系統的最佳組合其功能主要在於提供駕駛者行的安全方便
快速並非只是侷限於汽車的動態定位而是廣泛的包括定位與定位後的導
引在日本與歐美等先進國家已發展多年也有實際的成果展現在世人眼前
但是在台灣還是屬於剛起步的階段
因此本系統的開發必須先從定位及導航觀念為出發點並結合地理資訊
系統(GIS)才能夠達成目標
由於美國國防部所建立的全球衛星定位系統與地理資訊系統為車輛監
控系統之主要基礎因此本論文首先就GPS 及GIS 的基本理論先加以探
討再利用GPS 衛星接收器將所需的所在地地理資訊資料擷取下來經過
座標轉換的步驟將所在地的地理位資料與電子地圖作一結合分析形成汽
車監控系統的雛形
圖 1-1 車輛監控系統架構
本論文著重於嵌入式移動系統之實現進而結合監控台的功能來達成
車輛監控之目標嵌入式移動系統包含 GPS 全球衛星定位系統GSMGPRS
無線通訊模組ARM 7TDMI CPU 核心處理器等三大部分主要利用 ARM 7
進行控制透過 GPS 衛星定位器接收來自衛星的定位訊號再加上車輛
ID 與車輛狀況的描述後經由 GSMGPRS 模組把加工後的定位資料傳至
監控台讓管理者能隨時掌握車輛的一舉一動並於必要時與之聯繫了解
2
車輛運行狀況或進行新路線的派遣若是發生緊急狀況時也能全程錄音
即時監控
此監控系統可應用在即時車輛管理及車輛監控上並可將交通運輸推展
至智慧運輸系統上使得車輛使用能夠更加有效率及安全
13 系統簡介
車輛監控系統的特色在於不僅能夠非常有效的掌握車輛位置狀況即時
下達指令至車載 Client 端上經由即時監控中心即可觀測每一台車輛的行車
狀況與緊急情況而且監控系統非常大的好處在於低廉的通信費用
透過 GPS 接收器與 GPRS(General Packet Radio Service) 的無線通訊
網路可動態取得車輛所在位置資訊即時傳遞至監控台由監控台人員執
行車輛管理監控台與路線規劃的動作將所有派遣資訊即時傳遞至執行勤務
的運送人員依據監控台指令完成遞送工作
監控台此時扮演更重要的溝通聯繫角色可以彙總即時路況資訊傳
遞綜合研判的行車動向指令協助線上動態運行的車輛獲得即時的行車指
南車輛上所裝置的嵌入式移動系統亦可依車輛運作狀況在發生緊急事件
時於監控台可獲得最即時的數據資料例如車輛故障之拖救服務交通事
故發生時之速度數據舉證等等車輛監控系統之基本架構圖如圖 1-2 所示
圖 1-2 車輛監控系統基本架構圖[10]
3
14 論文回顧
GPS 與 GIS 的發展已有相當的一段時間無論在期刊文獻論文各
方面都有許多的研究與探討我們特別針對 GPS 與 GIS 結合在汽車監控部
分加以提出做為研究的基礎
世界上已有許多國家早在多年前即實際的進行有關汽車導航系統開發
與研究像加拿大的 Calgary 大學所研發的 AVL2000 即為一個非常成功的
例子[2]~[6]
根據相關的文獻研究目前仍在繼續發展及改進的帶路系統共有 40 餘
種之多而且已從第一代的〝Where am I〞獨立系統(AutonomousStand alone
system)及第二代的〝Where are You〞快速傳遞系統(Dispatch system)和加入
了道路資訊或導引系統的第三代〝How do I get there〞發展到現在的智慧型
帶路系統[2][7]
由於在過去的文獻中如文獻[8][9]車輛的位置透過 GPS 接收完衛星
訊號之後是藉由 GSM 的簡訊發送系統來傳送 GPS 的定位資訊但是由
於很多因素如 GSM 基地台塞機塞車行動通訊模組暫時不在接收範圍內
網路傳輸品質不穩定如傳輸速度較慢或者行動電話記憶體滿了使得簡訊
遺失造成車輛的定位無法作一個即時的回報因此在車輛的監控方面將會
造成很大的缺失又因發送簡訊的時間是有時間間距的至少間距五分鐘以
上如果發生緊急狀況時就無法立即作一個很好的處置又因簡訊是以傳
送的封數來計算如此監控的花費將會非常大
由於 GPS 現今已經發展的非常成熟了所以有越來越多的導航系統
會跟 GPS 來做結合如文獻[10]~[14]以 electronic road pricing (ERP) system
電子收費系統文獻[14]來說結合 GPS 全球衛星定位系統就是一個非常創新
的想法使用 GPS 科技來做結合不只可以非常有效率划算但是它
必須透過公路上所架設固定的跨軌訊號杆來做資訊的傳送對於監控就比
4
較沒有效率了所以本文將會針對即時的監控以及車輛的防護安全作一
個完善的改進
隨著人類追求產品的服務功能與品質的提昇要求迅速以及智慧型功能
的增進相信更進步的汽車監控系統不久將會展現於世人的面前
15 論文組織及概觀
本篇論文總共分為六個章節概要分述如下
第一章說明本論文的研究動機與目的並對文中所用到的理論架構以及
介紹作一概略性的敘述
第二章針對整個 GPS 發展概況系統架構衛星訊號結構與訊號格式
定位原理GPS 誤差分析做一個詳細的介紹
第三章針對整個 GIS 地理資訊發展情況電子地圖的介紹以及衛星座
標系統轉換做一個詳細的介紹
第四章針對無線通訊 GPRS 網路的發展方式作一個詳盡的介紹
第五章介紹車輛監控系統的整體架構嵌入式移動車載系統的硬體架構設
計嵌入式移動系統韌體程式結構與流程以及即時監控程式與系
統的介紹
第六章操作說明與實驗結果討論說明實驗的程序實際道路路況測試
與實際的汽車導航操作
第七章結論與未來展望總結本論文的研究成果並說明未來應用的方向以
及其發展性
5
第二章 GPS 全球衛星定位系統分析
21 GPS 發展概況
所謂 GPS 是全球衛星定位系統(Global Position System)簡稱為美國國防
部為軍事上定位及導航目的所發展的GPS 可以極準確地提供七種定位所需
的訊息三度空間位置三度空間的速度以及時間因為它的全天候高
準確定位的特性不但成功地應用在現代軍事化設備上而且在民間用途方
面也因其實用潛力雄厚而深受矚目而 GPS 的優越性能已漸漸應用於各
方面例如船艦及飛機的導航定位可以在瞬間獲得位置及速度的數值
港灣內將導航及追蹤結合以減少碰撞的可能性增加航道安全性的管理
油井鑽勘平台的定位礦產源位置的定位飛彈上的導航航空海上陸
地之測量等等都應為有 GPS 的加入而更趨於完善的目標
211 GPS 的緣起
1958 年 12 月美國海軍武器實驗室開始建立為美國海軍軍艦導航服務
的衛星系統即「海軍導航衛星系統」(Navy Navigation Satellite System
NNSS)此系統中衛星運行的軌道大多通過地球南北極因此也稱為「子午
(Transit)衛星系統」1964 年該系統建構完成提供美國軍方使用1967
年 7 月 29 日美國政府宣佈將該系統解密並提供民間使用為衛星定位系
統運用的開始
由於該系統不受氣候條件影響自動化程度較高且具有良好的定位精
度所以解密之後立即引起各方學者的研究與應用雖然 NNSS 把導航技術
的發展推向另一個新時代但由於該系統的衛星數量較少(5-6 顆)衛星運
轉的高度較低(平均運行高度約 1000km)從地面站觀測到衛星的時間間隔
較長(平均約 15 小時)因而無法提供連續的三維導航且獲得一次導航
求解所需的時間較長無法滿足軍事方面(由其是高速飛行目標如飛機
6
導彈)導航需求
於是美國國防部為軍事定時定位與導航目的將美國海軍所開發的
TIMATION(Time And Navigation)系統和美國空軍的 621B 兩個專案予以合
併後並改名為「全球衛星定位系統」(NAVSTARGPSNavigation Satellite
Timing And RangingGlobal Positioning System直接簡稱為 GPS)希望能
以衛星導航為基礎的技術可構成主要的無線電導航系統滿足各方面科技的
應用
212 GPS 的發展
全球定位系統所使用的衛星稱為 NAVSTAR第一顆 GPS 衛星於 1978
年 2 月 22 日發射GPS 為美國繼阿波羅登月與太空梭發展計劃後的第三大
太空國防計劃此一計劃係利用 GPS 衛星發射電波訊號以提供定時定位
及導航使用其精確度極高且不受電波干擾及時間地點和天候的影響
提供使用者全天候即時的位置與時間資訊所能達到的精度較以往的導航
及測量方法都來得高
在 1993 年 12 月 8 日第 24 顆 GPS 衛星進入太空軌道運行後GPS 已達
到初步操作能力(Initial Operational CapabilityIOC)24 顆 GPS 衛星(包
含初期測試用的 Block I 與量產型 Block IIIIA)提供全世界 24 小時全天候定
位與導航資訊
美國空軍太空司令部(US Air Force Space CommandAFSC)於 1995
年 4 月 27 日宣布 GPS 已達到完整操作能力(Full Operational Capability
FOC)將 IOC 中的 Block I 衛星加以汰換24 顆衛星全部為 Block IIIIA 衛
星所組成成功地滿足軍事實務的操作
GPS 衛星佈署在離地球表面約 20200 公里上空的圓形軌道上採圓形
軌道的目的在於可增大地面可見範圍及增強全球均勻覆蓋它們平均分佈於
7
6 個軌道面上每個軌道面上各有 4 顆呈 55deg 角傾斜繞行地球運轉每
11 小時 58 分繞行地球一周不論任何時間地點同時至少有 4 顆以上的
衛星出現在我們的上空
由於 GPS 的運用技術迅速發展使得民間的應用需求與日俱增對傳
統導航方式更有革命性的影響
由於 GPS 操作簡便迅速成果精確其用途甚為廣泛除軍事用途外
更大量運用在民用航空航海車輛控制油源探測大氣地球科學等
特別是協助交通運輸環境生態森林地質等資訊之調查管理與土地測
量等目前國內外已大量在汽車上安裝 GPS 接收儀並配合電子地圖以幫
助駕駛者找到捷運及目的地同時如徒步登山及狩獵者亦可利用 GPS 提
供方位不致迷失我們可以肯定一點日後 GPS 在航電國防交通甚至
日常生活都將佔有非常重要的地位
213 GPS 的應用
一陸地應用
(一) 大地測量國家及區域控制網建立精密工程測量
(二) 測量及製圖地籍測量地理資訊系統之資料測量工程測量
(三) 交通路網圖繪製
(四) 地球動力研究與變形監測
(五) 高精度時間比對
(六) 陸上導航支援緊急車輛(警車救護車消防保全等)車輛
監控派遣(計程車危險性車輛貨櫃運輸火車等)
(七) 森林巡視員之搜救任務如登山意外事故山崩雪崩等
(八) 森林資源管理
8
二空中應用
(一) 機場精密進場著陸國內線國際線民航機及直昇機導航
(二)空中交通管制作業
(三) 航空攝影測量導引與控制空中重力及磁力測量之定位
(四)農藥噴灑
(五)休閒娛樂滑翔機飛行傘輕航機等
22 GPS 系統架構
全球衛星定位系統(GPS)只要是利用接收衛星軌道資料求解出衛星所在
位置再計算出接收器本身與衛星間的距離以求出GPS接收器的位置因
此全球定位系統是一套不受地點時間與天候影響的高精度定位系統
全球衛星定位系統架構可分為三大部份[15]太空部份( the space
segment)控制部份(the control segment)及使用者部份(the user segment)
圖 2-1 全球衛星定位系統架構[15]
221 太空部份(the space segment)
GPS 系統之太空部份針對運行的衛星本體而言目前係由 24 顆操作衛
9
星及 3 顆備用衛星所組成三顆備用衛星的功能主要在作為衛星失效時之備
用及加強衛星之幾何分佈在平時這些衛星也可用於定位故為主動預備
(active spare)方式運作
27 顆分佈於 6 個軌道面上如圖 2-2[1]衛星軌道相對地球赤道面的傾角
為 55deg如圖 2-3每個軌道面上至少分佈有 4 顆衛星軌道面與另一軌道面
上的衛星則相差 40deg衛星高度為 20200 公里每 11 小時 58 分繞行地球一
周這樣可以讓使用者在全球各地任何時刻都可以同時觀測到 4 顆以上的衛
星以利實施三度空間之定位測量
圖 2-2 衛星分布圖[1]
圖 2-3 地球赤道面的傾角[1]
10
222 控制部份(the control segment)
對於 GPS 導航定位而言GPS 衛星是一動態的已知點它是依據衛星
傳送的星曆計算而得所謂衛星星曆即是一系列描述衛星運動及其軌道的參
數每顆 GPS 衛星所傳送的星曆皆由 GPS 的地面監控系統所提供
衛星進入軌道運行之後其各種設備是否正常運作是否依預定軌道運
行等皆需要由地面設備來進行監測和控制
此外地面監控系統還有一個重要的工作就是保持各衛星處於同一時
間標準(即 GPS 時間系統)因此由地面監控系統監測各衛星的時間計
算它們的有關正數進而將導航訊息傳送給用戶以確保處於 GPS 時系
GPS 之操縱控制部分已於 1985 年 9 月完成整個控制部分包括了一個
主控站三個地面控制站五個監測站而五個監測站中的三個(Ascension
IslandDiego GarciaKwajalein)為地面控制站其擁有專有的地面天線
主控站位於美國科羅拉多州之 Springs主要功能為彙整監測站所蒐集
的資料並計算衛星的軌道與時間參數之後做軌道平滑處理並將資料傳送
至地面控制站然後在藉由監控站專用天線將資料上傳至衛星除此之外
衛星的控制與操作皆為主控站的主要任務
每個監測站均擁有一個GPS雙頻接收機標準銫原子鐘感測器及資料
處理機其座標都是經過美國國防製圖局精密測量而得每個監測站必須每
天24小時連續追蹤觀測每一顆衛星並將每一秒半之虛擬距離接收量及接收
所得之氣象資料及電離層資料聯合求解得每15分鐘一個平滑資料然後將
資料傳送至主控站主控站即整合個監視站之資料計算衛星星曆衛星時鐘
改正量及電離層改正係數等並且將所得結果彙集成導航訊息傳遞到地面天
線處再由地面天線傳送到各衛星上以更新衛星內的資料如此衛星即
可傳送新的資料給使用者接收使用如圖2-4
11
圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

GPS 全球定位系統的最佳組合其功能主要在於提供駕駛者行的安全方便
快速並非只是侷限於汽車的動態定位而是廣泛的包括定位與定位後的導
引在日本與歐美等先進國家已發展多年也有實際的成果展現在世人眼前
但是在台灣還是屬於剛起步的階段
因此本系統的開發必須先從定位及導航觀念為出發點並結合地理資訊
系統(GIS)才能夠達成目標
由於美國國防部所建立的全球衛星定位系統與地理資訊系統為車輛監
控系統之主要基礎因此本論文首先就GPS 及GIS 的基本理論先加以探
討再利用GPS 衛星接收器將所需的所在地地理資訊資料擷取下來經過
座標轉換的步驟將所在地的地理位資料與電子地圖作一結合分析形成汽
車監控系統的雛形
圖 1-1 車輛監控系統架構
本論文著重於嵌入式移動系統之實現進而結合監控台的功能來達成
車輛監控之目標嵌入式移動系統包含 GPS 全球衛星定位系統GSMGPRS
無線通訊模組ARM 7TDMI CPU 核心處理器等三大部分主要利用 ARM 7
進行控制透過 GPS 衛星定位器接收來自衛星的定位訊號再加上車輛
ID 與車輛狀況的描述後經由 GSMGPRS 模組把加工後的定位資料傳至
監控台讓管理者能隨時掌握車輛的一舉一動並於必要時與之聯繫了解
2
車輛運行狀況或進行新路線的派遣若是發生緊急狀況時也能全程錄音
即時監控
此監控系統可應用在即時車輛管理及車輛監控上並可將交通運輸推展
至智慧運輸系統上使得車輛使用能夠更加有效率及安全
13 系統簡介
車輛監控系統的特色在於不僅能夠非常有效的掌握車輛位置狀況即時
下達指令至車載 Client 端上經由即時監控中心即可觀測每一台車輛的行車
狀況與緊急情況而且監控系統非常大的好處在於低廉的通信費用
透過 GPS 接收器與 GPRS(General Packet Radio Service) 的無線通訊
網路可動態取得車輛所在位置資訊即時傳遞至監控台由監控台人員執
行車輛管理監控台與路線規劃的動作將所有派遣資訊即時傳遞至執行勤務
的運送人員依據監控台指令完成遞送工作
監控台此時扮演更重要的溝通聯繫角色可以彙總即時路況資訊傳
遞綜合研判的行車動向指令協助線上動態運行的車輛獲得即時的行車指
南車輛上所裝置的嵌入式移動系統亦可依車輛運作狀況在發生緊急事件
時於監控台可獲得最即時的數據資料例如車輛故障之拖救服務交通事
故發生時之速度數據舉證等等車輛監控系統之基本架構圖如圖 1-2 所示
圖 1-2 車輛監控系統基本架構圖[10]
3
14 論文回顧
GPS 與 GIS 的發展已有相當的一段時間無論在期刊文獻論文各
方面都有許多的研究與探討我們特別針對 GPS 與 GIS 結合在汽車監控部
分加以提出做為研究的基礎
世界上已有許多國家早在多年前即實際的進行有關汽車導航系統開發
與研究像加拿大的 Calgary 大學所研發的 AVL2000 即為一個非常成功的
例子[2]~[6]
根據相關的文獻研究目前仍在繼續發展及改進的帶路系統共有 40 餘
種之多而且已從第一代的〝Where am I〞獨立系統(AutonomousStand alone
system)及第二代的〝Where are You〞快速傳遞系統(Dispatch system)和加入
了道路資訊或導引系統的第三代〝How do I get there〞發展到現在的智慧型
帶路系統[2][7]
由於在過去的文獻中如文獻[8][9]車輛的位置透過 GPS 接收完衛星
訊號之後是藉由 GSM 的簡訊發送系統來傳送 GPS 的定位資訊但是由
於很多因素如 GSM 基地台塞機塞車行動通訊模組暫時不在接收範圍內
網路傳輸品質不穩定如傳輸速度較慢或者行動電話記憶體滿了使得簡訊
遺失造成車輛的定位無法作一個即時的回報因此在車輛的監控方面將會
造成很大的缺失又因發送簡訊的時間是有時間間距的至少間距五分鐘以
上如果發生緊急狀況時就無法立即作一個很好的處置又因簡訊是以傳
送的封數來計算如此監控的花費將會非常大
由於 GPS 現今已經發展的非常成熟了所以有越來越多的導航系統
會跟 GPS 來做結合如文獻[10]~[14]以 electronic road pricing (ERP) system
電子收費系統文獻[14]來說結合 GPS 全球衛星定位系統就是一個非常創新
的想法使用 GPS 科技來做結合不只可以非常有效率划算但是它
必須透過公路上所架設固定的跨軌訊號杆來做資訊的傳送對於監控就比
4
較沒有效率了所以本文將會針對即時的監控以及車輛的防護安全作一
個完善的改進
隨著人類追求產品的服務功能與品質的提昇要求迅速以及智慧型功能
的增進相信更進步的汽車監控系統不久將會展現於世人的面前
15 論文組織及概觀
本篇論文總共分為六個章節概要分述如下
第一章說明本論文的研究動機與目的並對文中所用到的理論架構以及
介紹作一概略性的敘述
第二章針對整個 GPS 發展概況系統架構衛星訊號結構與訊號格式
定位原理GPS 誤差分析做一個詳細的介紹
第三章針對整個 GIS 地理資訊發展情況電子地圖的介紹以及衛星座
標系統轉換做一個詳細的介紹
第四章針對無線通訊 GPRS 網路的發展方式作一個詳盡的介紹
第五章介紹車輛監控系統的整體架構嵌入式移動車載系統的硬體架構設
計嵌入式移動系統韌體程式結構與流程以及即時監控程式與系
統的介紹
第六章操作說明與實驗結果討論說明實驗的程序實際道路路況測試
與實際的汽車導航操作
第七章結論與未來展望總結本論文的研究成果並說明未來應用的方向以
及其發展性
5
第二章 GPS 全球衛星定位系統分析
21 GPS 發展概況
所謂 GPS 是全球衛星定位系統(Global Position System)簡稱為美國國防
部為軍事上定位及導航目的所發展的GPS 可以極準確地提供七種定位所需
的訊息三度空間位置三度空間的速度以及時間因為它的全天候高
準確定位的特性不但成功地應用在現代軍事化設備上而且在民間用途方
面也因其實用潛力雄厚而深受矚目而 GPS 的優越性能已漸漸應用於各
方面例如船艦及飛機的導航定位可以在瞬間獲得位置及速度的數值
港灣內將導航及追蹤結合以減少碰撞的可能性增加航道安全性的管理
油井鑽勘平台的定位礦產源位置的定位飛彈上的導航航空海上陸
地之測量等等都應為有 GPS 的加入而更趨於完善的目標
211 GPS 的緣起
1958 年 12 月美國海軍武器實驗室開始建立為美國海軍軍艦導航服務
的衛星系統即「海軍導航衛星系統」(Navy Navigation Satellite System
NNSS)此系統中衛星運行的軌道大多通過地球南北極因此也稱為「子午
(Transit)衛星系統」1964 年該系統建構完成提供美國軍方使用1967
年 7 月 29 日美國政府宣佈將該系統解密並提供民間使用為衛星定位系
統運用的開始
由於該系統不受氣候條件影響自動化程度較高且具有良好的定位精
度所以解密之後立即引起各方學者的研究與應用雖然 NNSS 把導航技術
的發展推向另一個新時代但由於該系統的衛星數量較少(5-6 顆)衛星運
轉的高度較低(平均運行高度約 1000km)從地面站觀測到衛星的時間間隔
較長(平均約 15 小時)因而無法提供連續的三維導航且獲得一次導航
求解所需的時間較長無法滿足軍事方面(由其是高速飛行目標如飛機
6
導彈)導航需求
於是美國國防部為軍事定時定位與導航目的將美國海軍所開發的
TIMATION(Time And Navigation)系統和美國空軍的 621B 兩個專案予以合
併後並改名為「全球衛星定位系統」(NAVSTARGPSNavigation Satellite
Timing And RangingGlobal Positioning System直接簡稱為 GPS)希望能
以衛星導航為基礎的技術可構成主要的無線電導航系統滿足各方面科技的
應用
212 GPS 的發展
全球定位系統所使用的衛星稱為 NAVSTAR第一顆 GPS 衛星於 1978
年 2 月 22 日發射GPS 為美國繼阿波羅登月與太空梭發展計劃後的第三大
太空國防計劃此一計劃係利用 GPS 衛星發射電波訊號以提供定時定位
及導航使用其精確度極高且不受電波干擾及時間地點和天候的影響
提供使用者全天候即時的位置與時間資訊所能達到的精度較以往的導航
及測量方法都來得高
在 1993 年 12 月 8 日第 24 顆 GPS 衛星進入太空軌道運行後GPS 已達
到初步操作能力(Initial Operational CapabilityIOC)24 顆 GPS 衛星(包
含初期測試用的 Block I 與量產型 Block IIIIA)提供全世界 24 小時全天候定
位與導航資訊
美國空軍太空司令部(US Air Force Space CommandAFSC)於 1995
年 4 月 27 日宣布 GPS 已達到完整操作能力(Full Operational Capability
FOC)將 IOC 中的 Block I 衛星加以汰換24 顆衛星全部為 Block IIIIA 衛
星所組成成功地滿足軍事實務的操作
GPS 衛星佈署在離地球表面約 20200 公里上空的圓形軌道上採圓形
軌道的目的在於可增大地面可見範圍及增強全球均勻覆蓋它們平均分佈於
7
6 個軌道面上每個軌道面上各有 4 顆呈 55deg 角傾斜繞行地球運轉每
11 小時 58 分繞行地球一周不論任何時間地點同時至少有 4 顆以上的
衛星出現在我們的上空
由於 GPS 的運用技術迅速發展使得民間的應用需求與日俱增對傳
統導航方式更有革命性的影響
由於 GPS 操作簡便迅速成果精確其用途甚為廣泛除軍事用途外
更大量運用在民用航空航海車輛控制油源探測大氣地球科學等
特別是協助交通運輸環境生態森林地質等資訊之調查管理與土地測
量等目前國內外已大量在汽車上安裝 GPS 接收儀並配合電子地圖以幫
助駕駛者找到捷運及目的地同時如徒步登山及狩獵者亦可利用 GPS 提
供方位不致迷失我們可以肯定一點日後 GPS 在航電國防交通甚至
日常生活都將佔有非常重要的地位
213 GPS 的應用
一陸地應用
(一) 大地測量國家及區域控制網建立精密工程測量
(二) 測量及製圖地籍測量地理資訊系統之資料測量工程測量
(三) 交通路網圖繪製
(四) 地球動力研究與變形監測
(五) 高精度時間比對
(六) 陸上導航支援緊急車輛(警車救護車消防保全等)車輛
監控派遣(計程車危險性車輛貨櫃運輸火車等)
(七) 森林巡視員之搜救任務如登山意外事故山崩雪崩等
(八) 森林資源管理
8
二空中應用
(一) 機場精密進場著陸國內線國際線民航機及直昇機導航
(二)空中交通管制作業
(三) 航空攝影測量導引與控制空中重力及磁力測量之定位
(四)農藥噴灑
(五)休閒娛樂滑翔機飛行傘輕航機等
22 GPS 系統架構
全球衛星定位系統(GPS)只要是利用接收衛星軌道資料求解出衛星所在
位置再計算出接收器本身與衛星間的距離以求出GPS接收器的位置因
此全球定位系統是一套不受地點時間與天候影響的高精度定位系統
全球衛星定位系統架構可分為三大部份[15]太空部份( the space
segment)控制部份(the control segment)及使用者部份(the user segment)
圖 2-1 全球衛星定位系統架構[15]
221 太空部份(the space segment)
GPS 系統之太空部份針對運行的衛星本體而言目前係由 24 顆操作衛
9
星及 3 顆備用衛星所組成三顆備用衛星的功能主要在作為衛星失效時之備
用及加強衛星之幾何分佈在平時這些衛星也可用於定位故為主動預備
(active spare)方式運作
27 顆分佈於 6 個軌道面上如圖 2-2[1]衛星軌道相對地球赤道面的傾角
為 55deg如圖 2-3每個軌道面上至少分佈有 4 顆衛星軌道面與另一軌道面
上的衛星則相差 40deg衛星高度為 20200 公里每 11 小時 58 分繞行地球一
周這樣可以讓使用者在全球各地任何時刻都可以同時觀測到 4 顆以上的衛
星以利實施三度空間之定位測量
圖 2-2 衛星分布圖[1]
圖 2-3 地球赤道面的傾角[1]
10
222 控制部份(the control segment)
對於 GPS 導航定位而言GPS 衛星是一動態的已知點它是依據衛星
傳送的星曆計算而得所謂衛星星曆即是一系列描述衛星運動及其軌道的參
數每顆 GPS 衛星所傳送的星曆皆由 GPS 的地面監控系統所提供
衛星進入軌道運行之後其各種設備是否正常運作是否依預定軌道運
行等皆需要由地面設備來進行監測和控制
此外地面監控系統還有一個重要的工作就是保持各衛星處於同一時
間標準(即 GPS 時間系統)因此由地面監控系統監測各衛星的時間計
算它們的有關正數進而將導航訊息傳送給用戶以確保處於 GPS 時系
GPS 之操縱控制部分已於 1985 年 9 月完成整個控制部分包括了一個
主控站三個地面控制站五個監測站而五個監測站中的三個(Ascension
IslandDiego GarciaKwajalein)為地面控制站其擁有專有的地面天線
主控站位於美國科羅拉多州之 Springs主要功能為彙整監測站所蒐集
的資料並計算衛星的軌道與時間參數之後做軌道平滑處理並將資料傳送
至地面控制站然後在藉由監控站專用天線將資料上傳至衛星除此之外
衛星的控制與操作皆為主控站的主要任務
每個監測站均擁有一個GPS雙頻接收機標準銫原子鐘感測器及資料
處理機其座標都是經過美國國防製圖局精密測量而得每個監測站必須每
天24小時連續追蹤觀測每一顆衛星並將每一秒半之虛擬距離接收量及接收
所得之氣象資料及電離層資料聯合求解得每15分鐘一個平滑資料然後將
資料傳送至主控站主控站即整合個監視站之資料計算衛星星曆衛星時鐘
改正量及電離層改正係數等並且將所得結果彙集成導航訊息傳遞到地面天
線處再由地面天線傳送到各衛星上以更新衛星內的資料如此衛星即
可傳送新的資料給使用者接收使用如圖2-4
11
圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-
車輛運行狀況或進行新路線的派遣若是發生緊急狀況時也能全程錄音
即時監控
此監控系統可應用在即時車輛管理及車輛監控上並可將交通運輸推展
至智慧運輸系統上使得車輛使用能夠更加有效率及安全
13 系統簡介
車輛監控系統的特色在於不僅能夠非常有效的掌握車輛位置狀況即時
下達指令至車載 Client 端上經由即時監控中心即可觀測每一台車輛的行車
狀況與緊急情況而且監控系統非常大的好處在於低廉的通信費用
透過 GPS 接收器與 GPRS(General Packet Radio Service) 的無線通訊
網路可動態取得車輛所在位置資訊即時傳遞至監控台由監控台人員執
行車輛管理監控台與路線規劃的動作將所有派遣資訊即時傳遞至執行勤務
的運送人員依據監控台指令完成遞送工作
監控台此時扮演更重要的溝通聯繫角色可以彙總即時路況資訊傳
遞綜合研判的行車動向指令協助線上動態運行的車輛獲得即時的行車指
南車輛上所裝置的嵌入式移動系統亦可依車輛運作狀況在發生緊急事件
時於監控台可獲得最即時的數據資料例如車輛故障之拖救服務交通事
故發生時之速度數據舉證等等車輛監控系統之基本架構圖如圖 1-2 所示
圖 1-2 車輛監控系統基本架構圖[10]
3
14 論文回顧
GPS 與 GIS 的發展已有相當的一段時間無論在期刊文獻論文各
方面都有許多的研究與探討我們特別針對 GPS 與 GIS 結合在汽車監控部
分加以提出做為研究的基礎
世界上已有許多國家早在多年前即實際的進行有關汽車導航系統開發
與研究像加拿大的 Calgary 大學所研發的 AVL2000 即為一個非常成功的
例子[2]~[6]
根據相關的文獻研究目前仍在繼續發展及改進的帶路系統共有 40 餘
種之多而且已從第一代的〝Where am I〞獨立系統(AutonomousStand alone
system)及第二代的〝Where are You〞快速傳遞系統(Dispatch system)和加入
了道路資訊或導引系統的第三代〝How do I get there〞發展到現在的智慧型
帶路系統[2][7]
由於在過去的文獻中如文獻[8][9]車輛的位置透過 GPS 接收完衛星
訊號之後是藉由 GSM 的簡訊發送系統來傳送 GPS 的定位資訊但是由
於很多因素如 GSM 基地台塞機塞車行動通訊模組暫時不在接收範圍內
網路傳輸品質不穩定如傳輸速度較慢或者行動電話記憶體滿了使得簡訊
遺失造成車輛的定位無法作一個即時的回報因此在車輛的監控方面將會
造成很大的缺失又因發送簡訊的時間是有時間間距的至少間距五分鐘以
上如果發生緊急狀況時就無法立即作一個很好的處置又因簡訊是以傳
送的封數來計算如此監控的花費將會非常大
由於 GPS 現今已經發展的非常成熟了所以有越來越多的導航系統
會跟 GPS 來做結合如文獻[10]~[14]以 electronic road pricing (ERP) system
電子收費系統文獻[14]來說結合 GPS 全球衛星定位系統就是一個非常創新
的想法使用 GPS 科技來做結合不只可以非常有效率划算但是它
必須透過公路上所架設固定的跨軌訊號杆來做資訊的傳送對於監控就比
4
較沒有效率了所以本文將會針對即時的監控以及車輛的防護安全作一
個完善的改進
隨著人類追求產品的服務功能與品質的提昇要求迅速以及智慧型功能
的增進相信更進步的汽車監控系統不久將會展現於世人的面前
15 論文組織及概觀
本篇論文總共分為六個章節概要分述如下
第一章說明本論文的研究動機與目的並對文中所用到的理論架構以及
介紹作一概略性的敘述
第二章針對整個 GPS 發展概況系統架構衛星訊號結構與訊號格式
定位原理GPS 誤差分析做一個詳細的介紹
第三章針對整個 GIS 地理資訊發展情況電子地圖的介紹以及衛星座
標系統轉換做一個詳細的介紹
第四章針對無線通訊 GPRS 網路的發展方式作一個詳盡的介紹
第五章介紹車輛監控系統的整體架構嵌入式移動車載系統的硬體架構設
計嵌入式移動系統韌體程式結構與流程以及即時監控程式與系
統的介紹
第六章操作說明與實驗結果討論說明實驗的程序實際道路路況測試
與實際的汽車導航操作
第七章結論與未來展望總結本論文的研究成果並說明未來應用的方向以
及其發展性
5
第二章 GPS 全球衛星定位系統分析
21 GPS 發展概況
所謂 GPS 是全球衛星定位系統(Global Position System)簡稱為美國國防
部為軍事上定位及導航目的所發展的GPS 可以極準確地提供七種定位所需
的訊息三度空間位置三度空間的速度以及時間因為它的全天候高
準確定位的特性不但成功地應用在現代軍事化設備上而且在民間用途方
面也因其實用潛力雄厚而深受矚目而 GPS 的優越性能已漸漸應用於各
方面例如船艦及飛機的導航定位可以在瞬間獲得位置及速度的數值
港灣內將導航及追蹤結合以減少碰撞的可能性增加航道安全性的管理
油井鑽勘平台的定位礦產源位置的定位飛彈上的導航航空海上陸
地之測量等等都應為有 GPS 的加入而更趨於完善的目標
211 GPS 的緣起
1958 年 12 月美國海軍武器實驗室開始建立為美國海軍軍艦導航服務
的衛星系統即「海軍導航衛星系統」(Navy Navigation Satellite System
NNSS)此系統中衛星運行的軌道大多通過地球南北極因此也稱為「子午
(Transit)衛星系統」1964 年該系統建構完成提供美國軍方使用1967
年 7 月 29 日美國政府宣佈將該系統解密並提供民間使用為衛星定位系
統運用的開始
由於該系統不受氣候條件影響自動化程度較高且具有良好的定位精
度所以解密之後立即引起各方學者的研究與應用雖然 NNSS 把導航技術
的發展推向另一個新時代但由於該系統的衛星數量較少(5-6 顆)衛星運
轉的高度較低(平均運行高度約 1000km)從地面站觀測到衛星的時間間隔
較長(平均約 15 小時)因而無法提供連續的三維導航且獲得一次導航
求解所需的時間較長無法滿足軍事方面(由其是高速飛行目標如飛機
6
導彈)導航需求
於是美國國防部為軍事定時定位與導航目的將美國海軍所開發的
TIMATION(Time And Navigation)系統和美國空軍的 621B 兩個專案予以合
併後並改名為「全球衛星定位系統」(NAVSTARGPSNavigation Satellite
Timing And RangingGlobal Positioning System直接簡稱為 GPS)希望能
以衛星導航為基礎的技術可構成主要的無線電導航系統滿足各方面科技的
應用
212 GPS 的發展
全球定位系統所使用的衛星稱為 NAVSTAR第一顆 GPS 衛星於 1978
年 2 月 22 日發射GPS 為美國繼阿波羅登月與太空梭發展計劃後的第三大
太空國防計劃此一計劃係利用 GPS 衛星發射電波訊號以提供定時定位
及導航使用其精確度極高且不受電波干擾及時間地點和天候的影響
提供使用者全天候即時的位置與時間資訊所能達到的精度較以往的導航
及測量方法都來得高
在 1993 年 12 月 8 日第 24 顆 GPS 衛星進入太空軌道運行後GPS 已達
到初步操作能力(Initial Operational CapabilityIOC)24 顆 GPS 衛星(包
含初期測試用的 Block I 與量產型 Block IIIIA)提供全世界 24 小時全天候定
位與導航資訊
美國空軍太空司令部(US Air Force Space CommandAFSC)於 1995
年 4 月 27 日宣布 GPS 已達到完整操作能力(Full Operational Capability
FOC)將 IOC 中的 Block I 衛星加以汰換24 顆衛星全部為 Block IIIIA 衛
星所組成成功地滿足軍事實務的操作
GPS 衛星佈署在離地球表面約 20200 公里上空的圓形軌道上採圓形
軌道的目的在於可增大地面可見範圍及增強全球均勻覆蓋它們平均分佈於
7
6 個軌道面上每個軌道面上各有 4 顆呈 55deg 角傾斜繞行地球運轉每
11 小時 58 分繞行地球一周不論任何時間地點同時至少有 4 顆以上的
衛星出現在我們的上空
由於 GPS 的運用技術迅速發展使得民間的應用需求與日俱增對傳
統導航方式更有革命性的影響
由於 GPS 操作簡便迅速成果精確其用途甚為廣泛除軍事用途外
更大量運用在民用航空航海車輛控制油源探測大氣地球科學等
特別是協助交通運輸環境生態森林地質等資訊之調查管理與土地測
量等目前國內外已大量在汽車上安裝 GPS 接收儀並配合電子地圖以幫
助駕駛者找到捷運及目的地同時如徒步登山及狩獵者亦可利用 GPS 提
供方位不致迷失我們可以肯定一點日後 GPS 在航電國防交通甚至
日常生活都將佔有非常重要的地位
213 GPS 的應用
一陸地應用
(一) 大地測量國家及區域控制網建立精密工程測量
(二) 測量及製圖地籍測量地理資訊系統之資料測量工程測量
(三) 交通路網圖繪製
(四) 地球動力研究與變形監測
(五) 高精度時間比對
(六) 陸上導航支援緊急車輛(警車救護車消防保全等)車輛
監控派遣(計程車危險性車輛貨櫃運輸火車等)
(七) 森林巡視員之搜救任務如登山意外事故山崩雪崩等
(八) 森林資源管理
8
二空中應用
(一) 機場精密進場著陸國內線國際線民航機及直昇機導航
(二)空中交通管制作業
(三) 航空攝影測量導引與控制空中重力及磁力測量之定位
(四)農藥噴灑
(五)休閒娛樂滑翔機飛行傘輕航機等
22 GPS 系統架構
全球衛星定位系統(GPS)只要是利用接收衛星軌道資料求解出衛星所在
位置再計算出接收器本身與衛星間的距離以求出GPS接收器的位置因
此全球定位系統是一套不受地點時間與天候影響的高精度定位系統
全球衛星定位系統架構可分為三大部份[15]太空部份( the space
segment)控制部份(the control segment)及使用者部份(the user segment)
圖 2-1 全球衛星定位系統架構[15]
221 太空部份(the space segment)
GPS 系統之太空部份針對運行的衛星本體而言目前係由 24 顆操作衛
9
星及 3 顆備用衛星所組成三顆備用衛星的功能主要在作為衛星失效時之備
用及加強衛星之幾何分佈在平時這些衛星也可用於定位故為主動預備
(active spare)方式運作
27 顆分佈於 6 個軌道面上如圖 2-2[1]衛星軌道相對地球赤道面的傾角
為 55deg如圖 2-3每個軌道面上至少分佈有 4 顆衛星軌道面與另一軌道面
上的衛星則相差 40deg衛星高度為 20200 公里每 11 小時 58 分繞行地球一
周這樣可以讓使用者在全球各地任何時刻都可以同時觀測到 4 顆以上的衛
星以利實施三度空間之定位測量
圖 2-2 衛星分布圖[1]
圖 2-3 地球赤道面的傾角[1]
10
222 控制部份(the control segment)
對於 GPS 導航定位而言GPS 衛星是一動態的已知點它是依據衛星
傳送的星曆計算而得所謂衛星星曆即是一系列描述衛星運動及其軌道的參
數每顆 GPS 衛星所傳送的星曆皆由 GPS 的地面監控系統所提供
衛星進入軌道運行之後其各種設備是否正常運作是否依預定軌道運
行等皆需要由地面設備來進行監測和控制
此外地面監控系統還有一個重要的工作就是保持各衛星處於同一時
間標準(即 GPS 時間系統)因此由地面監控系統監測各衛星的時間計
算它們的有關正數進而將導航訊息傳送給用戶以確保處於 GPS 時系
GPS 之操縱控制部分已於 1985 年 9 月完成整個控制部分包括了一個
主控站三個地面控制站五個監測站而五個監測站中的三個(Ascension
IslandDiego GarciaKwajalein)為地面控制站其擁有專有的地面天線
主控站位於美國科羅拉多州之 Springs主要功能為彙整監測站所蒐集
的資料並計算衛星的軌道與時間參數之後做軌道平滑處理並將資料傳送
至地面控制站然後在藉由監控站專用天線將資料上傳至衛星除此之外
衛星的控制與操作皆為主控站的主要任務
每個監測站均擁有一個GPS雙頻接收機標準銫原子鐘感測器及資料
處理機其座標都是經過美國國防製圖局精密測量而得每個監測站必須每
天24小時連續追蹤觀測每一顆衛星並將每一秒半之虛擬距離接收量及接收
所得之氣象資料及電離層資料聯合求解得每15分鐘一個平滑資料然後將
資料傳送至主控站主控站即整合個監視站之資料計算衛星星曆衛星時鐘
改正量及電離層改正係數等並且將所得結果彙集成導航訊息傳遞到地面天
線處再由地面天線傳送到各衛星上以更新衛星內的資料如此衛星即
可傳送新的資料給使用者接收使用如圖2-4
11
圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-
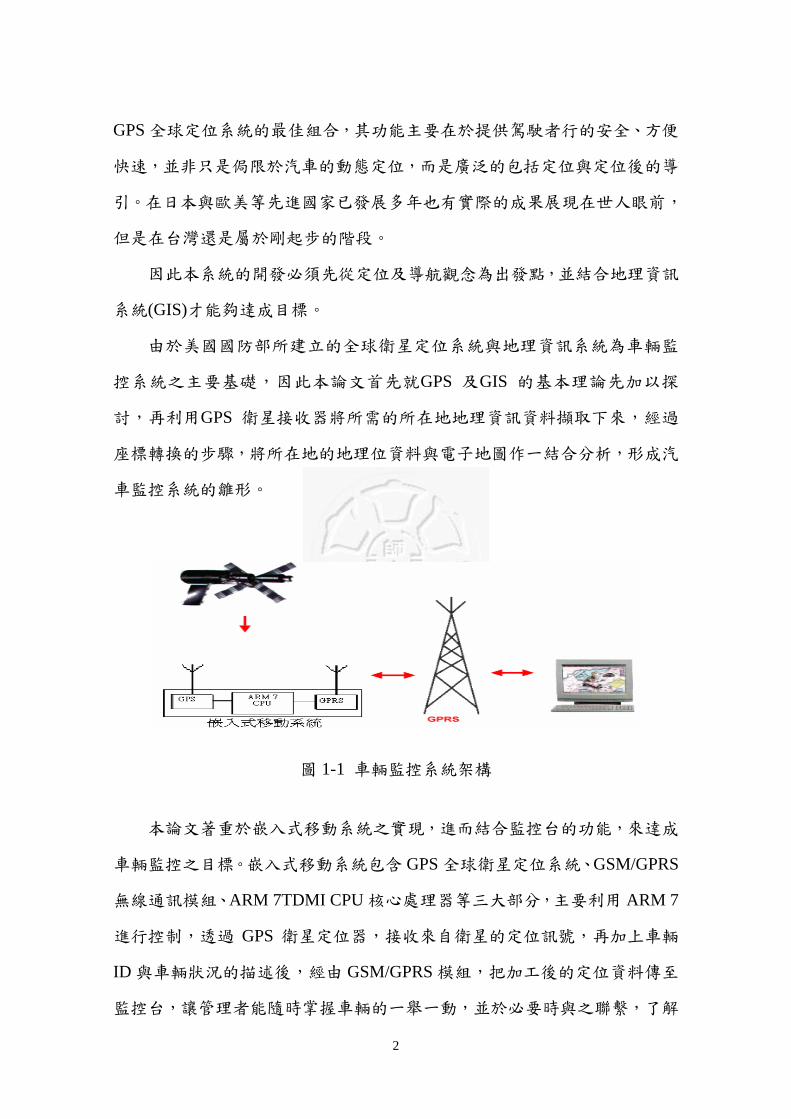
14 論文回顧
GPS 與 GIS 的發展已有相當的一段時間無論在期刊文獻論文各
方面都有許多的研究與探討我們特別針對 GPS 與 GIS 結合在汽車監控部
分加以提出做為研究的基礎
世界上已有許多國家早在多年前即實際的進行有關汽車導航系統開發
與研究像加拿大的 Calgary 大學所研發的 AVL2000 即為一個非常成功的
例子[2]~[6]
根據相關的文獻研究目前仍在繼續發展及改進的帶路系統共有 40 餘
種之多而且已從第一代的〝Where am I〞獨立系統(AutonomousStand alone
system)及第二代的〝Where are You〞快速傳遞系統(Dispatch system)和加入
了道路資訊或導引系統的第三代〝How do I get there〞發展到現在的智慧型
帶路系統[2][7]
由於在過去的文獻中如文獻[8][9]車輛的位置透過 GPS 接收完衛星
訊號之後是藉由 GSM 的簡訊發送系統來傳送 GPS 的定位資訊但是由
於很多因素如 GSM 基地台塞機塞車行動通訊模組暫時不在接收範圍內
網路傳輸品質不穩定如傳輸速度較慢或者行動電話記憶體滿了使得簡訊
遺失造成車輛的定位無法作一個即時的回報因此在車輛的監控方面將會
造成很大的缺失又因發送簡訊的時間是有時間間距的至少間距五分鐘以
上如果發生緊急狀況時就無法立即作一個很好的處置又因簡訊是以傳
送的封數來計算如此監控的花費將會非常大
由於 GPS 現今已經發展的非常成熟了所以有越來越多的導航系統
會跟 GPS 來做結合如文獻[10]~[14]以 electronic road pricing (ERP) system
電子收費系統文獻[14]來說結合 GPS 全球衛星定位系統就是一個非常創新
的想法使用 GPS 科技來做結合不只可以非常有效率划算但是它
必須透過公路上所架設固定的跨軌訊號杆來做資訊的傳送對於監控就比
4
較沒有效率了所以本文將會針對即時的監控以及車輛的防護安全作一
個完善的改進
隨著人類追求產品的服務功能與品質的提昇要求迅速以及智慧型功能
的增進相信更進步的汽車監控系統不久將會展現於世人的面前
15 論文組織及概觀
本篇論文總共分為六個章節概要分述如下
第一章說明本論文的研究動機與目的並對文中所用到的理論架構以及
介紹作一概略性的敘述
第二章針對整個 GPS 發展概況系統架構衛星訊號結構與訊號格式
定位原理GPS 誤差分析做一個詳細的介紹
第三章針對整個 GIS 地理資訊發展情況電子地圖的介紹以及衛星座
標系統轉換做一個詳細的介紹
第四章針對無線通訊 GPRS 網路的發展方式作一個詳盡的介紹
第五章介紹車輛監控系統的整體架構嵌入式移動車載系統的硬體架構設
計嵌入式移動系統韌體程式結構與流程以及即時監控程式與系
統的介紹
第六章操作說明與實驗結果討論說明實驗的程序實際道路路況測試
與實際的汽車導航操作
第七章結論與未來展望總結本論文的研究成果並說明未來應用的方向以
及其發展性
5
第二章 GPS 全球衛星定位系統分析
21 GPS 發展概況
所謂 GPS 是全球衛星定位系統(Global Position System)簡稱為美國國防
部為軍事上定位及導航目的所發展的GPS 可以極準確地提供七種定位所需
的訊息三度空間位置三度空間的速度以及時間因為它的全天候高
準確定位的特性不但成功地應用在現代軍事化設備上而且在民間用途方
面也因其實用潛力雄厚而深受矚目而 GPS 的優越性能已漸漸應用於各
方面例如船艦及飛機的導航定位可以在瞬間獲得位置及速度的數值
港灣內將導航及追蹤結合以減少碰撞的可能性增加航道安全性的管理
油井鑽勘平台的定位礦產源位置的定位飛彈上的導航航空海上陸
地之測量等等都應為有 GPS 的加入而更趨於完善的目標
211 GPS 的緣起
1958 年 12 月美國海軍武器實驗室開始建立為美國海軍軍艦導航服務
的衛星系統即「海軍導航衛星系統」(Navy Navigation Satellite System
NNSS)此系統中衛星運行的軌道大多通過地球南北極因此也稱為「子午
(Transit)衛星系統」1964 年該系統建構完成提供美國軍方使用1967
年 7 月 29 日美國政府宣佈將該系統解密並提供民間使用為衛星定位系
統運用的開始
由於該系統不受氣候條件影響自動化程度較高且具有良好的定位精
度所以解密之後立即引起各方學者的研究與應用雖然 NNSS 把導航技術
的發展推向另一個新時代但由於該系統的衛星數量較少(5-6 顆)衛星運
轉的高度較低(平均運行高度約 1000km)從地面站觀測到衛星的時間間隔
較長(平均約 15 小時)因而無法提供連續的三維導航且獲得一次導航
求解所需的時間較長無法滿足軍事方面(由其是高速飛行目標如飛機
6
導彈)導航需求
於是美國國防部為軍事定時定位與導航目的將美國海軍所開發的
TIMATION(Time And Navigation)系統和美國空軍的 621B 兩個專案予以合
併後並改名為「全球衛星定位系統」(NAVSTARGPSNavigation Satellite
Timing And RangingGlobal Positioning System直接簡稱為 GPS)希望能
以衛星導航為基礎的技術可構成主要的無線電導航系統滿足各方面科技的
應用
212 GPS 的發展
全球定位系統所使用的衛星稱為 NAVSTAR第一顆 GPS 衛星於 1978
年 2 月 22 日發射GPS 為美國繼阿波羅登月與太空梭發展計劃後的第三大
太空國防計劃此一計劃係利用 GPS 衛星發射電波訊號以提供定時定位
及導航使用其精確度極高且不受電波干擾及時間地點和天候的影響
提供使用者全天候即時的位置與時間資訊所能達到的精度較以往的導航
及測量方法都來得高
在 1993 年 12 月 8 日第 24 顆 GPS 衛星進入太空軌道運行後GPS 已達
到初步操作能力(Initial Operational CapabilityIOC)24 顆 GPS 衛星(包
含初期測試用的 Block I 與量產型 Block IIIIA)提供全世界 24 小時全天候定
位與導航資訊
美國空軍太空司令部(US Air Force Space CommandAFSC)於 1995
年 4 月 27 日宣布 GPS 已達到完整操作能力(Full Operational Capability
FOC)將 IOC 中的 Block I 衛星加以汰換24 顆衛星全部為 Block IIIIA 衛
星所組成成功地滿足軍事實務的操作
GPS 衛星佈署在離地球表面約 20200 公里上空的圓形軌道上採圓形
軌道的目的在於可增大地面可見範圍及增強全球均勻覆蓋它們平均分佈於
7
6 個軌道面上每個軌道面上各有 4 顆呈 55deg 角傾斜繞行地球運轉每
11 小時 58 分繞行地球一周不論任何時間地點同時至少有 4 顆以上的
衛星出現在我們的上空
由於 GPS 的運用技術迅速發展使得民間的應用需求與日俱增對傳
統導航方式更有革命性的影響
由於 GPS 操作簡便迅速成果精確其用途甚為廣泛除軍事用途外
更大量運用在民用航空航海車輛控制油源探測大氣地球科學等
特別是協助交通運輸環境生態森林地質等資訊之調查管理與土地測
量等目前國內外已大量在汽車上安裝 GPS 接收儀並配合電子地圖以幫
助駕駛者找到捷運及目的地同時如徒步登山及狩獵者亦可利用 GPS 提
供方位不致迷失我們可以肯定一點日後 GPS 在航電國防交通甚至
日常生活都將佔有非常重要的地位
213 GPS 的應用
一陸地應用
(一) 大地測量國家及區域控制網建立精密工程測量
(二) 測量及製圖地籍測量地理資訊系統之資料測量工程測量
(三) 交通路網圖繪製
(四) 地球動力研究與變形監測
(五) 高精度時間比對
(六) 陸上導航支援緊急車輛(警車救護車消防保全等)車輛
監控派遣(計程車危險性車輛貨櫃運輸火車等)
(七) 森林巡視員之搜救任務如登山意外事故山崩雪崩等
(八) 森林資源管理
8
二空中應用
(一) 機場精密進場著陸國內線國際線民航機及直昇機導航
(二)空中交通管制作業
(三) 航空攝影測量導引與控制空中重力及磁力測量之定位
(四)農藥噴灑
(五)休閒娛樂滑翔機飛行傘輕航機等
22 GPS 系統架構
全球衛星定位系統(GPS)只要是利用接收衛星軌道資料求解出衛星所在
位置再計算出接收器本身與衛星間的距離以求出GPS接收器的位置因
此全球定位系統是一套不受地點時間與天候影響的高精度定位系統
全球衛星定位系統架構可分為三大部份[15]太空部份( the space
segment)控制部份(the control segment)及使用者部份(the user segment)
圖 2-1 全球衛星定位系統架構[15]
221 太空部份(the space segment)
GPS 系統之太空部份針對運行的衛星本體而言目前係由 24 顆操作衛
9
星及 3 顆備用衛星所組成三顆備用衛星的功能主要在作為衛星失效時之備
用及加強衛星之幾何分佈在平時這些衛星也可用於定位故為主動預備
(active spare)方式運作
27 顆分佈於 6 個軌道面上如圖 2-2[1]衛星軌道相對地球赤道面的傾角
為 55deg如圖 2-3每個軌道面上至少分佈有 4 顆衛星軌道面與另一軌道面
上的衛星則相差 40deg衛星高度為 20200 公里每 11 小時 58 分繞行地球一
周這樣可以讓使用者在全球各地任何時刻都可以同時觀測到 4 顆以上的衛
星以利實施三度空間之定位測量
圖 2-2 衛星分布圖[1]
圖 2-3 地球赤道面的傾角[1]
10
222 控制部份(the control segment)
對於 GPS 導航定位而言GPS 衛星是一動態的已知點它是依據衛星
傳送的星曆計算而得所謂衛星星曆即是一系列描述衛星運動及其軌道的參
數每顆 GPS 衛星所傳送的星曆皆由 GPS 的地面監控系統所提供
衛星進入軌道運行之後其各種設備是否正常運作是否依預定軌道運
行等皆需要由地面設備來進行監測和控制
此外地面監控系統還有一個重要的工作就是保持各衛星處於同一時
間標準(即 GPS 時間系統)因此由地面監控系統監測各衛星的時間計
算它們的有關正數進而將導航訊息傳送給用戶以確保處於 GPS 時系
GPS 之操縱控制部分已於 1985 年 9 月完成整個控制部分包括了一個
主控站三個地面控制站五個監測站而五個監測站中的三個(Ascension
IslandDiego GarciaKwajalein)為地面控制站其擁有專有的地面天線
主控站位於美國科羅拉多州之 Springs主要功能為彙整監測站所蒐集
的資料並計算衛星的軌道與時間參數之後做軌道平滑處理並將資料傳送
至地面控制站然後在藉由監控站專用天線將資料上傳至衛星除此之外
衛星的控制與操作皆為主控站的主要任務
每個監測站均擁有一個GPS雙頻接收機標準銫原子鐘感測器及資料
處理機其座標都是經過美國國防製圖局精密測量而得每個監測站必須每
天24小時連續追蹤觀測每一顆衛星並將每一秒半之虛擬距離接收量及接收
所得之氣象資料及電離層資料聯合求解得每15分鐘一個平滑資料然後將
資料傳送至主控站主控站即整合個監視站之資料計算衛星星曆衛星時鐘
改正量及電離層改正係數等並且將所得結果彙集成導航訊息傳遞到地面天
線處再由地面天線傳送到各衛星上以更新衛星內的資料如此衛星即
可傳送新的資料給使用者接收使用如圖2-4
11
圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-
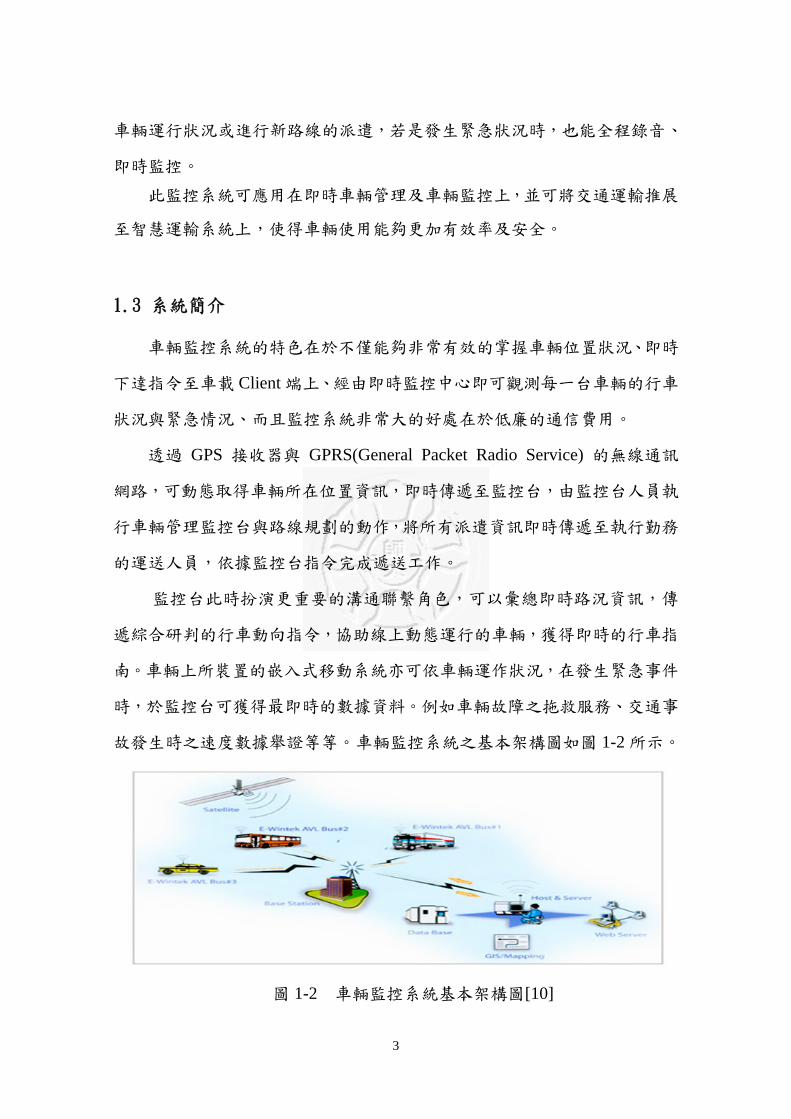
較沒有效率了所以本文將會針對即時的監控以及車輛的防護安全作一
個完善的改進
隨著人類追求產品的服務功能與品質的提昇要求迅速以及智慧型功能
的增進相信更進步的汽車監控系統不久將會展現於世人的面前
15 論文組織及概觀
本篇論文總共分為六個章節概要分述如下
第一章說明本論文的研究動機與目的並對文中所用到的理論架構以及
介紹作一概略性的敘述
第二章針對整個 GPS 發展概況系統架構衛星訊號結構與訊號格式
定位原理GPS 誤差分析做一個詳細的介紹
第三章針對整個 GIS 地理資訊發展情況電子地圖的介紹以及衛星座
標系統轉換做一個詳細的介紹
第四章針對無線通訊 GPRS 網路的發展方式作一個詳盡的介紹
第五章介紹車輛監控系統的整體架構嵌入式移動車載系統的硬體架構設
計嵌入式移動系統韌體程式結構與流程以及即時監控程式與系
統的介紹
第六章操作說明與實驗結果討論說明實驗的程序實際道路路況測試
與實際的汽車導航操作
第七章結論與未來展望總結本論文的研究成果並說明未來應用的方向以
及其發展性
5
第二章 GPS 全球衛星定位系統分析
21 GPS 發展概況
所謂 GPS 是全球衛星定位系統(Global Position System)簡稱為美國國防
部為軍事上定位及導航目的所發展的GPS 可以極準確地提供七種定位所需
的訊息三度空間位置三度空間的速度以及時間因為它的全天候高
準確定位的特性不但成功地應用在現代軍事化設備上而且在民間用途方
面也因其實用潛力雄厚而深受矚目而 GPS 的優越性能已漸漸應用於各
方面例如船艦及飛機的導航定位可以在瞬間獲得位置及速度的數值
港灣內將導航及追蹤結合以減少碰撞的可能性增加航道安全性的管理
油井鑽勘平台的定位礦產源位置的定位飛彈上的導航航空海上陸
地之測量等等都應為有 GPS 的加入而更趨於完善的目標
211 GPS 的緣起
1958 年 12 月美國海軍武器實驗室開始建立為美國海軍軍艦導航服務
的衛星系統即「海軍導航衛星系統」(Navy Navigation Satellite System
NNSS)此系統中衛星運行的軌道大多通過地球南北極因此也稱為「子午
(Transit)衛星系統」1964 年該系統建構完成提供美國軍方使用1967
年 7 月 29 日美國政府宣佈將該系統解密並提供民間使用為衛星定位系
統運用的開始
由於該系統不受氣候條件影響自動化程度較高且具有良好的定位精
度所以解密之後立即引起各方學者的研究與應用雖然 NNSS 把導航技術
的發展推向另一個新時代但由於該系統的衛星數量較少(5-6 顆)衛星運
轉的高度較低(平均運行高度約 1000km)從地面站觀測到衛星的時間間隔
較長(平均約 15 小時)因而無法提供連續的三維導航且獲得一次導航
求解所需的時間較長無法滿足軍事方面(由其是高速飛行目標如飛機
6
導彈)導航需求
於是美國國防部為軍事定時定位與導航目的將美國海軍所開發的
TIMATION(Time And Navigation)系統和美國空軍的 621B 兩個專案予以合
併後並改名為「全球衛星定位系統」(NAVSTARGPSNavigation Satellite
Timing And RangingGlobal Positioning System直接簡稱為 GPS)希望能
以衛星導航為基礎的技術可構成主要的無線電導航系統滿足各方面科技的
應用
212 GPS 的發展
全球定位系統所使用的衛星稱為 NAVSTAR第一顆 GPS 衛星於 1978
年 2 月 22 日發射GPS 為美國繼阿波羅登月與太空梭發展計劃後的第三大
太空國防計劃此一計劃係利用 GPS 衛星發射電波訊號以提供定時定位
及導航使用其精確度極高且不受電波干擾及時間地點和天候的影響
提供使用者全天候即時的位置與時間資訊所能達到的精度較以往的導航
及測量方法都來得高
在 1993 年 12 月 8 日第 24 顆 GPS 衛星進入太空軌道運行後GPS 已達
到初步操作能力(Initial Operational CapabilityIOC)24 顆 GPS 衛星(包
含初期測試用的 Block I 與量產型 Block IIIIA)提供全世界 24 小時全天候定
位與導航資訊
美國空軍太空司令部(US Air Force Space CommandAFSC)於 1995
年 4 月 27 日宣布 GPS 已達到完整操作能力(Full Operational Capability
FOC)將 IOC 中的 Block I 衛星加以汰換24 顆衛星全部為 Block IIIIA 衛
星所組成成功地滿足軍事實務的操作
GPS 衛星佈署在離地球表面約 20200 公里上空的圓形軌道上採圓形
軌道的目的在於可增大地面可見範圍及增強全球均勻覆蓋它們平均分佈於
7
6 個軌道面上每個軌道面上各有 4 顆呈 55deg 角傾斜繞行地球運轉每
11 小時 58 分繞行地球一周不論任何時間地點同時至少有 4 顆以上的
衛星出現在我們的上空
由於 GPS 的運用技術迅速發展使得民間的應用需求與日俱增對傳
統導航方式更有革命性的影響
由於 GPS 操作簡便迅速成果精確其用途甚為廣泛除軍事用途外
更大量運用在民用航空航海車輛控制油源探測大氣地球科學等
特別是協助交通運輸環境生態森林地質等資訊之調查管理與土地測
量等目前國內外已大量在汽車上安裝 GPS 接收儀並配合電子地圖以幫
助駕駛者找到捷運及目的地同時如徒步登山及狩獵者亦可利用 GPS 提
供方位不致迷失我們可以肯定一點日後 GPS 在航電國防交通甚至
日常生活都將佔有非常重要的地位
213 GPS 的應用
一陸地應用
(一) 大地測量國家及區域控制網建立精密工程測量
(二) 測量及製圖地籍測量地理資訊系統之資料測量工程測量
(三) 交通路網圖繪製
(四) 地球動力研究與變形監測
(五) 高精度時間比對
(六) 陸上導航支援緊急車輛(警車救護車消防保全等)車輛
監控派遣(計程車危險性車輛貨櫃運輸火車等)
(七) 森林巡視員之搜救任務如登山意外事故山崩雪崩等
(八) 森林資源管理
8
二空中應用
(一) 機場精密進場著陸國內線國際線民航機及直昇機導航
(二)空中交通管制作業
(三) 航空攝影測量導引與控制空中重力及磁力測量之定位
(四)農藥噴灑
(五)休閒娛樂滑翔機飛行傘輕航機等
22 GPS 系統架構
全球衛星定位系統(GPS)只要是利用接收衛星軌道資料求解出衛星所在
位置再計算出接收器本身與衛星間的距離以求出GPS接收器的位置因
此全球定位系統是一套不受地點時間與天候影響的高精度定位系統
全球衛星定位系統架構可分為三大部份[15]太空部份( the space
segment)控制部份(the control segment)及使用者部份(the user segment)
圖 2-1 全球衛星定位系統架構[15]
221 太空部份(the space segment)
GPS 系統之太空部份針對運行的衛星本體而言目前係由 24 顆操作衛
9
星及 3 顆備用衛星所組成三顆備用衛星的功能主要在作為衛星失效時之備
用及加強衛星之幾何分佈在平時這些衛星也可用於定位故為主動預備
(active spare)方式運作
27 顆分佈於 6 個軌道面上如圖 2-2[1]衛星軌道相對地球赤道面的傾角
為 55deg如圖 2-3每個軌道面上至少分佈有 4 顆衛星軌道面與另一軌道面
上的衛星則相差 40deg衛星高度為 20200 公里每 11 小時 58 分繞行地球一
周這樣可以讓使用者在全球各地任何時刻都可以同時觀測到 4 顆以上的衛
星以利實施三度空間之定位測量
圖 2-2 衛星分布圖[1]
圖 2-3 地球赤道面的傾角[1]
10
222 控制部份(the control segment)
對於 GPS 導航定位而言GPS 衛星是一動態的已知點它是依據衛星
傳送的星曆計算而得所謂衛星星曆即是一系列描述衛星運動及其軌道的參
數每顆 GPS 衛星所傳送的星曆皆由 GPS 的地面監控系統所提供
衛星進入軌道運行之後其各種設備是否正常運作是否依預定軌道運
行等皆需要由地面設備來進行監測和控制
此外地面監控系統還有一個重要的工作就是保持各衛星處於同一時
間標準(即 GPS 時間系統)因此由地面監控系統監測各衛星的時間計
算它們的有關正數進而將導航訊息傳送給用戶以確保處於 GPS 時系
GPS 之操縱控制部分已於 1985 年 9 月完成整個控制部分包括了一個
主控站三個地面控制站五個監測站而五個監測站中的三個(Ascension
IslandDiego GarciaKwajalein)為地面控制站其擁有專有的地面天線
主控站位於美國科羅拉多州之 Springs主要功能為彙整監測站所蒐集
的資料並計算衛星的軌道與時間參數之後做軌道平滑處理並將資料傳送
至地面控制站然後在藉由監控站專用天線將資料上傳至衛星除此之外
衛星的控制與操作皆為主控站的主要任務
每個監測站均擁有一個GPS雙頻接收機標準銫原子鐘感測器及資料
處理機其座標都是經過美國國防製圖局精密測量而得每個監測站必須每
天24小時連續追蹤觀測每一顆衛星並將每一秒半之虛擬距離接收量及接收
所得之氣象資料及電離層資料聯合求解得每15分鐘一個平滑資料然後將
資料傳送至主控站主控站即整合個監視站之資料計算衛星星曆衛星時鐘
改正量及電離層改正係數等並且將所得結果彙集成導航訊息傳遞到地面天
線處再由地面天線傳送到各衛星上以更新衛星內的資料如此衛星即
可傳送新的資料給使用者接收使用如圖2-4
11
圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

第二章 GPS 全球衛星定位系統分析
21 GPS 發展概況
所謂 GPS 是全球衛星定位系統(Global Position System)簡稱為美國國防
部為軍事上定位及導航目的所發展的GPS 可以極準確地提供七種定位所需
的訊息三度空間位置三度空間的速度以及時間因為它的全天候高
準確定位的特性不但成功地應用在現代軍事化設備上而且在民間用途方
面也因其實用潛力雄厚而深受矚目而 GPS 的優越性能已漸漸應用於各
方面例如船艦及飛機的導航定位可以在瞬間獲得位置及速度的數值
港灣內將導航及追蹤結合以減少碰撞的可能性增加航道安全性的管理
油井鑽勘平台的定位礦產源位置的定位飛彈上的導航航空海上陸
地之測量等等都應為有 GPS 的加入而更趨於完善的目標
211 GPS 的緣起
1958 年 12 月美國海軍武器實驗室開始建立為美國海軍軍艦導航服務
的衛星系統即「海軍導航衛星系統」(Navy Navigation Satellite System
NNSS)此系統中衛星運行的軌道大多通過地球南北極因此也稱為「子午
(Transit)衛星系統」1964 年該系統建構完成提供美國軍方使用1967
年 7 月 29 日美國政府宣佈將該系統解密並提供民間使用為衛星定位系
統運用的開始
由於該系統不受氣候條件影響自動化程度較高且具有良好的定位精
度所以解密之後立即引起各方學者的研究與應用雖然 NNSS 把導航技術
的發展推向另一個新時代但由於該系統的衛星數量較少(5-6 顆)衛星運
轉的高度較低(平均運行高度約 1000km)從地面站觀測到衛星的時間間隔
較長(平均約 15 小時)因而無法提供連續的三維導航且獲得一次導航
求解所需的時間較長無法滿足軍事方面(由其是高速飛行目標如飛機
6
導彈)導航需求
於是美國國防部為軍事定時定位與導航目的將美國海軍所開發的
TIMATION(Time And Navigation)系統和美國空軍的 621B 兩個專案予以合
併後並改名為「全球衛星定位系統」(NAVSTARGPSNavigation Satellite
Timing And RangingGlobal Positioning System直接簡稱為 GPS)希望能
以衛星導航為基礎的技術可構成主要的無線電導航系統滿足各方面科技的
應用
212 GPS 的發展
全球定位系統所使用的衛星稱為 NAVSTAR第一顆 GPS 衛星於 1978
年 2 月 22 日發射GPS 為美國繼阿波羅登月與太空梭發展計劃後的第三大
太空國防計劃此一計劃係利用 GPS 衛星發射電波訊號以提供定時定位
及導航使用其精確度極高且不受電波干擾及時間地點和天候的影響
提供使用者全天候即時的位置與時間資訊所能達到的精度較以往的導航
及測量方法都來得高
在 1993 年 12 月 8 日第 24 顆 GPS 衛星進入太空軌道運行後GPS 已達
到初步操作能力(Initial Operational CapabilityIOC)24 顆 GPS 衛星(包
含初期測試用的 Block I 與量產型 Block IIIIA)提供全世界 24 小時全天候定
位與導航資訊
美國空軍太空司令部(US Air Force Space CommandAFSC)於 1995
年 4 月 27 日宣布 GPS 已達到完整操作能力(Full Operational Capability
FOC)將 IOC 中的 Block I 衛星加以汰換24 顆衛星全部為 Block IIIIA 衛
星所組成成功地滿足軍事實務的操作
GPS 衛星佈署在離地球表面約 20200 公里上空的圓形軌道上採圓形
軌道的目的在於可增大地面可見範圍及增強全球均勻覆蓋它們平均分佈於
7
6 個軌道面上每個軌道面上各有 4 顆呈 55deg 角傾斜繞行地球運轉每
11 小時 58 分繞行地球一周不論任何時間地點同時至少有 4 顆以上的
衛星出現在我們的上空
由於 GPS 的運用技術迅速發展使得民間的應用需求與日俱增對傳
統導航方式更有革命性的影響
由於 GPS 操作簡便迅速成果精確其用途甚為廣泛除軍事用途外
更大量運用在民用航空航海車輛控制油源探測大氣地球科學等
特別是協助交通運輸環境生態森林地質等資訊之調查管理與土地測
量等目前國內外已大量在汽車上安裝 GPS 接收儀並配合電子地圖以幫
助駕駛者找到捷運及目的地同時如徒步登山及狩獵者亦可利用 GPS 提
供方位不致迷失我們可以肯定一點日後 GPS 在航電國防交通甚至
日常生活都將佔有非常重要的地位
213 GPS 的應用
一陸地應用
(一) 大地測量國家及區域控制網建立精密工程測量
(二) 測量及製圖地籍測量地理資訊系統之資料測量工程測量
(三) 交通路網圖繪製
(四) 地球動力研究與變形監測
(五) 高精度時間比對
(六) 陸上導航支援緊急車輛(警車救護車消防保全等)車輛
監控派遣(計程車危險性車輛貨櫃運輸火車等)
(七) 森林巡視員之搜救任務如登山意外事故山崩雪崩等
(八) 森林資源管理
8
二空中應用
(一) 機場精密進場著陸國內線國際線民航機及直昇機導航
(二)空中交通管制作業
(三) 航空攝影測量導引與控制空中重力及磁力測量之定位
(四)農藥噴灑
(五)休閒娛樂滑翔機飛行傘輕航機等
22 GPS 系統架構
全球衛星定位系統(GPS)只要是利用接收衛星軌道資料求解出衛星所在
位置再計算出接收器本身與衛星間的距離以求出GPS接收器的位置因
此全球定位系統是一套不受地點時間與天候影響的高精度定位系統
全球衛星定位系統架構可分為三大部份[15]太空部份( the space
segment)控制部份(the control segment)及使用者部份(the user segment)
圖 2-1 全球衛星定位系統架構[15]
221 太空部份(the space segment)
GPS 系統之太空部份針對運行的衛星本體而言目前係由 24 顆操作衛
9
星及 3 顆備用衛星所組成三顆備用衛星的功能主要在作為衛星失效時之備
用及加強衛星之幾何分佈在平時這些衛星也可用於定位故為主動預備
(active spare)方式運作
27 顆分佈於 6 個軌道面上如圖 2-2[1]衛星軌道相對地球赤道面的傾角
為 55deg如圖 2-3每個軌道面上至少分佈有 4 顆衛星軌道面與另一軌道面
上的衛星則相差 40deg衛星高度為 20200 公里每 11 小時 58 分繞行地球一
周這樣可以讓使用者在全球各地任何時刻都可以同時觀測到 4 顆以上的衛
星以利實施三度空間之定位測量
圖 2-2 衛星分布圖[1]
圖 2-3 地球赤道面的傾角[1]
10
222 控制部份(the control segment)
對於 GPS 導航定位而言GPS 衛星是一動態的已知點它是依據衛星
傳送的星曆計算而得所謂衛星星曆即是一系列描述衛星運動及其軌道的參
數每顆 GPS 衛星所傳送的星曆皆由 GPS 的地面監控系統所提供
衛星進入軌道運行之後其各種設備是否正常運作是否依預定軌道運
行等皆需要由地面設備來進行監測和控制
此外地面監控系統還有一個重要的工作就是保持各衛星處於同一時
間標準(即 GPS 時間系統)因此由地面監控系統監測各衛星的時間計
算它們的有關正數進而將導航訊息傳送給用戶以確保處於 GPS 時系
GPS 之操縱控制部分已於 1985 年 9 月完成整個控制部分包括了一個
主控站三個地面控制站五個監測站而五個監測站中的三個(Ascension
IslandDiego GarciaKwajalein)為地面控制站其擁有專有的地面天線
主控站位於美國科羅拉多州之 Springs主要功能為彙整監測站所蒐集
的資料並計算衛星的軌道與時間參數之後做軌道平滑處理並將資料傳送
至地面控制站然後在藉由監控站專用天線將資料上傳至衛星除此之外
衛星的控制與操作皆為主控站的主要任務
每個監測站均擁有一個GPS雙頻接收機標準銫原子鐘感測器及資料
處理機其座標都是經過美國國防製圖局精密測量而得每個監測站必須每
天24小時連續追蹤觀測每一顆衛星並將每一秒半之虛擬距離接收量及接收
所得之氣象資料及電離層資料聯合求解得每15分鐘一個平滑資料然後將
資料傳送至主控站主控站即整合個監視站之資料計算衛星星曆衛星時鐘
改正量及電離層改正係數等並且將所得結果彙集成導航訊息傳遞到地面天
線處再由地面天線傳送到各衛星上以更新衛星內的資料如此衛星即
可傳送新的資料給使用者接收使用如圖2-4
11
圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

導彈)導航需求
於是美國國防部為軍事定時定位與導航目的將美國海軍所開發的
TIMATION(Time And Navigation)系統和美國空軍的 621B 兩個專案予以合
併後並改名為「全球衛星定位系統」(NAVSTARGPSNavigation Satellite
Timing And RangingGlobal Positioning System直接簡稱為 GPS)希望能
以衛星導航為基礎的技術可構成主要的無線電導航系統滿足各方面科技的
應用
212 GPS 的發展
全球定位系統所使用的衛星稱為 NAVSTAR第一顆 GPS 衛星於 1978
年 2 月 22 日發射GPS 為美國繼阿波羅登月與太空梭發展計劃後的第三大
太空國防計劃此一計劃係利用 GPS 衛星發射電波訊號以提供定時定位
及導航使用其精確度極高且不受電波干擾及時間地點和天候的影響
提供使用者全天候即時的位置與時間資訊所能達到的精度較以往的導航
及測量方法都來得高
在 1993 年 12 月 8 日第 24 顆 GPS 衛星進入太空軌道運行後GPS 已達
到初步操作能力(Initial Operational CapabilityIOC)24 顆 GPS 衛星(包
含初期測試用的 Block I 與量產型 Block IIIIA)提供全世界 24 小時全天候定
位與導航資訊
美國空軍太空司令部(US Air Force Space CommandAFSC)於 1995
年 4 月 27 日宣布 GPS 已達到完整操作能力(Full Operational Capability
FOC)將 IOC 中的 Block I 衛星加以汰換24 顆衛星全部為 Block IIIIA 衛
星所組成成功地滿足軍事實務的操作
GPS 衛星佈署在離地球表面約 20200 公里上空的圓形軌道上採圓形
軌道的目的在於可增大地面可見範圍及增強全球均勻覆蓋它們平均分佈於
7
6 個軌道面上每個軌道面上各有 4 顆呈 55deg 角傾斜繞行地球運轉每
11 小時 58 分繞行地球一周不論任何時間地點同時至少有 4 顆以上的
衛星出現在我們的上空
由於 GPS 的運用技術迅速發展使得民間的應用需求與日俱增對傳
統導航方式更有革命性的影響
由於 GPS 操作簡便迅速成果精確其用途甚為廣泛除軍事用途外
更大量運用在民用航空航海車輛控制油源探測大氣地球科學等
特別是協助交通運輸環境生態森林地質等資訊之調查管理與土地測
量等目前國內外已大量在汽車上安裝 GPS 接收儀並配合電子地圖以幫
助駕駛者找到捷運及目的地同時如徒步登山及狩獵者亦可利用 GPS 提
供方位不致迷失我們可以肯定一點日後 GPS 在航電國防交通甚至
日常生活都將佔有非常重要的地位
213 GPS 的應用
一陸地應用
(一) 大地測量國家及區域控制網建立精密工程測量
(二) 測量及製圖地籍測量地理資訊系統之資料測量工程測量
(三) 交通路網圖繪製
(四) 地球動力研究與變形監測
(五) 高精度時間比對
(六) 陸上導航支援緊急車輛(警車救護車消防保全等)車輛
監控派遣(計程車危險性車輛貨櫃運輸火車等)
(七) 森林巡視員之搜救任務如登山意外事故山崩雪崩等
(八) 森林資源管理
8
二空中應用
(一) 機場精密進場著陸國內線國際線民航機及直昇機導航
(二)空中交通管制作業
(三) 航空攝影測量導引與控制空中重力及磁力測量之定位
(四)農藥噴灑
(五)休閒娛樂滑翔機飛行傘輕航機等
22 GPS 系統架構
全球衛星定位系統(GPS)只要是利用接收衛星軌道資料求解出衛星所在
位置再計算出接收器本身與衛星間的距離以求出GPS接收器的位置因
此全球定位系統是一套不受地點時間與天候影響的高精度定位系統
全球衛星定位系統架構可分為三大部份[15]太空部份( the space
segment)控制部份(the control segment)及使用者部份(the user segment)
圖 2-1 全球衛星定位系統架構[15]
221 太空部份(the space segment)
GPS 系統之太空部份針對運行的衛星本體而言目前係由 24 顆操作衛
9
星及 3 顆備用衛星所組成三顆備用衛星的功能主要在作為衛星失效時之備
用及加強衛星之幾何分佈在平時這些衛星也可用於定位故為主動預備
(active spare)方式運作
27 顆分佈於 6 個軌道面上如圖 2-2[1]衛星軌道相對地球赤道面的傾角
為 55deg如圖 2-3每個軌道面上至少分佈有 4 顆衛星軌道面與另一軌道面
上的衛星則相差 40deg衛星高度為 20200 公里每 11 小時 58 分繞行地球一
周這樣可以讓使用者在全球各地任何時刻都可以同時觀測到 4 顆以上的衛
星以利實施三度空間之定位測量
圖 2-2 衛星分布圖[1]
圖 2-3 地球赤道面的傾角[1]
10
222 控制部份(the control segment)
對於 GPS 導航定位而言GPS 衛星是一動態的已知點它是依據衛星
傳送的星曆計算而得所謂衛星星曆即是一系列描述衛星運動及其軌道的參
數每顆 GPS 衛星所傳送的星曆皆由 GPS 的地面監控系統所提供
衛星進入軌道運行之後其各種設備是否正常運作是否依預定軌道運
行等皆需要由地面設備來進行監測和控制
此外地面監控系統還有一個重要的工作就是保持各衛星處於同一時
間標準(即 GPS 時間系統)因此由地面監控系統監測各衛星的時間計
算它們的有關正數進而將導航訊息傳送給用戶以確保處於 GPS 時系
GPS 之操縱控制部分已於 1985 年 9 月完成整個控制部分包括了一個
主控站三個地面控制站五個監測站而五個監測站中的三個(Ascension
IslandDiego GarciaKwajalein)為地面控制站其擁有專有的地面天線
主控站位於美國科羅拉多州之 Springs主要功能為彙整監測站所蒐集
的資料並計算衛星的軌道與時間參數之後做軌道平滑處理並將資料傳送
至地面控制站然後在藉由監控站專用天線將資料上傳至衛星除此之外
衛星的控制與操作皆為主控站的主要任務
每個監測站均擁有一個GPS雙頻接收機標準銫原子鐘感測器及資料
處理機其座標都是經過美國國防製圖局精密測量而得每個監測站必須每
天24小時連續追蹤觀測每一顆衛星並將每一秒半之虛擬距離接收量及接收
所得之氣象資料及電離層資料聯合求解得每15分鐘一個平滑資料然後將
資料傳送至主控站主控站即整合個監視站之資料計算衛星星曆衛星時鐘
改正量及電離層改正係數等並且將所得結果彙集成導航訊息傳遞到地面天
線處再由地面天線傳送到各衛星上以更新衛星內的資料如此衛星即
可傳送新的資料給使用者接收使用如圖2-4
11
圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-
6 個軌道面上每個軌道面上各有 4 顆呈 55deg 角傾斜繞行地球運轉每
11 小時 58 分繞行地球一周不論任何時間地點同時至少有 4 顆以上的
衛星出現在我們的上空
由於 GPS 的運用技術迅速發展使得民間的應用需求與日俱增對傳
統導航方式更有革命性的影響
由於 GPS 操作簡便迅速成果精確其用途甚為廣泛除軍事用途外
更大量運用在民用航空航海車輛控制油源探測大氣地球科學等
特別是協助交通運輸環境生態森林地質等資訊之調查管理與土地測
量等目前國內外已大量在汽車上安裝 GPS 接收儀並配合電子地圖以幫
助駕駛者找到捷運及目的地同時如徒步登山及狩獵者亦可利用 GPS 提
供方位不致迷失我們可以肯定一點日後 GPS 在航電國防交通甚至
日常生活都將佔有非常重要的地位
213 GPS 的應用
一陸地應用
(一) 大地測量國家及區域控制網建立精密工程測量
(二) 測量及製圖地籍測量地理資訊系統之資料測量工程測量
(三) 交通路網圖繪製
(四) 地球動力研究與變形監測
(五) 高精度時間比對
(六) 陸上導航支援緊急車輛(警車救護車消防保全等)車輛
監控派遣(計程車危險性車輛貨櫃運輸火車等)
(七) 森林巡視員之搜救任務如登山意外事故山崩雪崩等
(八) 森林資源管理
8
二空中應用
(一) 機場精密進場著陸國內線國際線民航機及直昇機導航
(二)空中交通管制作業
(三) 航空攝影測量導引與控制空中重力及磁力測量之定位
(四)農藥噴灑
(五)休閒娛樂滑翔機飛行傘輕航機等
22 GPS 系統架構
全球衛星定位系統(GPS)只要是利用接收衛星軌道資料求解出衛星所在
位置再計算出接收器本身與衛星間的距離以求出GPS接收器的位置因
此全球定位系統是一套不受地點時間與天候影響的高精度定位系統
全球衛星定位系統架構可分為三大部份[15]太空部份( the space
segment)控制部份(the control segment)及使用者部份(the user segment)
圖 2-1 全球衛星定位系統架構[15]
221 太空部份(the space segment)
GPS 系統之太空部份針對運行的衛星本體而言目前係由 24 顆操作衛
9
星及 3 顆備用衛星所組成三顆備用衛星的功能主要在作為衛星失效時之備
用及加強衛星之幾何分佈在平時這些衛星也可用於定位故為主動預備
(active spare)方式運作
27 顆分佈於 6 個軌道面上如圖 2-2[1]衛星軌道相對地球赤道面的傾角
為 55deg如圖 2-3每個軌道面上至少分佈有 4 顆衛星軌道面與另一軌道面
上的衛星則相差 40deg衛星高度為 20200 公里每 11 小時 58 分繞行地球一
周這樣可以讓使用者在全球各地任何時刻都可以同時觀測到 4 顆以上的衛
星以利實施三度空間之定位測量
圖 2-2 衛星分布圖[1]
圖 2-3 地球赤道面的傾角[1]
10
222 控制部份(the control segment)
對於 GPS 導航定位而言GPS 衛星是一動態的已知點它是依據衛星
傳送的星曆計算而得所謂衛星星曆即是一系列描述衛星運動及其軌道的參
數每顆 GPS 衛星所傳送的星曆皆由 GPS 的地面監控系統所提供
衛星進入軌道運行之後其各種設備是否正常運作是否依預定軌道運
行等皆需要由地面設備來進行監測和控制
此外地面監控系統還有一個重要的工作就是保持各衛星處於同一時
間標準(即 GPS 時間系統)因此由地面監控系統監測各衛星的時間計
算它們的有關正數進而將導航訊息傳送給用戶以確保處於 GPS 時系
GPS 之操縱控制部分已於 1985 年 9 月完成整個控制部分包括了一個
主控站三個地面控制站五個監測站而五個監測站中的三個(Ascension
IslandDiego GarciaKwajalein)為地面控制站其擁有專有的地面天線
主控站位於美國科羅拉多州之 Springs主要功能為彙整監測站所蒐集
的資料並計算衛星的軌道與時間參數之後做軌道平滑處理並將資料傳送
至地面控制站然後在藉由監控站專用天線將資料上傳至衛星除此之外
衛星的控制與操作皆為主控站的主要任務
每個監測站均擁有一個GPS雙頻接收機標準銫原子鐘感測器及資料
處理機其座標都是經過美國國防製圖局精密測量而得每個監測站必須每
天24小時連續追蹤觀測每一顆衛星並將每一秒半之虛擬距離接收量及接收
所得之氣象資料及電離層資料聯合求解得每15分鐘一個平滑資料然後將
資料傳送至主控站主控站即整合個監視站之資料計算衛星星曆衛星時鐘
改正量及電離層改正係數等並且將所得結果彙集成導航訊息傳遞到地面天
線處再由地面天線傳送到各衛星上以更新衛星內的資料如此衛星即
可傳送新的資料給使用者接收使用如圖2-4
11
圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

二空中應用
(一) 機場精密進場著陸國內線國際線民航機及直昇機導航
(二)空中交通管制作業
(三) 航空攝影測量導引與控制空中重力及磁力測量之定位
(四)農藥噴灑
(五)休閒娛樂滑翔機飛行傘輕航機等
22 GPS 系統架構
全球衛星定位系統(GPS)只要是利用接收衛星軌道資料求解出衛星所在
位置再計算出接收器本身與衛星間的距離以求出GPS接收器的位置因
此全球定位系統是一套不受地點時間與天候影響的高精度定位系統
全球衛星定位系統架構可分為三大部份[15]太空部份( the space
segment)控制部份(the control segment)及使用者部份(the user segment)
圖 2-1 全球衛星定位系統架構[15]
221 太空部份(the space segment)
GPS 系統之太空部份針對運行的衛星本體而言目前係由 24 顆操作衛
9
星及 3 顆備用衛星所組成三顆備用衛星的功能主要在作為衛星失效時之備
用及加強衛星之幾何分佈在平時這些衛星也可用於定位故為主動預備
(active spare)方式運作
27 顆分佈於 6 個軌道面上如圖 2-2[1]衛星軌道相對地球赤道面的傾角
為 55deg如圖 2-3每個軌道面上至少分佈有 4 顆衛星軌道面與另一軌道面
上的衛星則相差 40deg衛星高度為 20200 公里每 11 小時 58 分繞行地球一
周這樣可以讓使用者在全球各地任何時刻都可以同時觀測到 4 顆以上的衛
星以利實施三度空間之定位測量
圖 2-2 衛星分布圖[1]
圖 2-3 地球赤道面的傾角[1]
10
222 控制部份(the control segment)
對於 GPS 導航定位而言GPS 衛星是一動態的已知點它是依據衛星
傳送的星曆計算而得所謂衛星星曆即是一系列描述衛星運動及其軌道的參
數每顆 GPS 衛星所傳送的星曆皆由 GPS 的地面監控系統所提供
衛星進入軌道運行之後其各種設備是否正常運作是否依預定軌道運
行等皆需要由地面設備來進行監測和控制
此外地面監控系統還有一個重要的工作就是保持各衛星處於同一時
間標準(即 GPS 時間系統)因此由地面監控系統監測各衛星的時間計
算它們的有關正數進而將導航訊息傳送給用戶以確保處於 GPS 時系
GPS 之操縱控制部分已於 1985 年 9 月完成整個控制部分包括了一個
主控站三個地面控制站五個監測站而五個監測站中的三個(Ascension
IslandDiego GarciaKwajalein)為地面控制站其擁有專有的地面天線
主控站位於美國科羅拉多州之 Springs主要功能為彙整監測站所蒐集
的資料並計算衛星的軌道與時間參數之後做軌道平滑處理並將資料傳送
至地面控制站然後在藉由監控站專用天線將資料上傳至衛星除此之外
衛星的控制與操作皆為主控站的主要任務
每個監測站均擁有一個GPS雙頻接收機標準銫原子鐘感測器及資料
處理機其座標都是經過美國國防製圖局精密測量而得每個監測站必須每
天24小時連續追蹤觀測每一顆衛星並將每一秒半之虛擬距離接收量及接收
所得之氣象資料及電離層資料聯合求解得每15分鐘一個平滑資料然後將
資料傳送至主控站主控站即整合個監視站之資料計算衛星星曆衛星時鐘
改正量及電離層改正係數等並且將所得結果彙集成導航訊息傳遞到地面天
線處再由地面天線傳送到各衛星上以更新衛星內的資料如此衛星即
可傳送新的資料給使用者接收使用如圖2-4
11
圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

星及 3 顆備用衛星所組成三顆備用衛星的功能主要在作為衛星失效時之備
用及加強衛星之幾何分佈在平時這些衛星也可用於定位故為主動預備
(active spare)方式運作
27 顆分佈於 6 個軌道面上如圖 2-2[1]衛星軌道相對地球赤道面的傾角
為 55deg如圖 2-3每個軌道面上至少分佈有 4 顆衛星軌道面與另一軌道面
上的衛星則相差 40deg衛星高度為 20200 公里每 11 小時 58 分繞行地球一
周這樣可以讓使用者在全球各地任何時刻都可以同時觀測到 4 顆以上的衛
星以利實施三度空間之定位測量
圖 2-2 衛星分布圖[1]
圖 2-3 地球赤道面的傾角[1]
10
222 控制部份(the control segment)
對於 GPS 導航定位而言GPS 衛星是一動態的已知點它是依據衛星
傳送的星曆計算而得所謂衛星星曆即是一系列描述衛星運動及其軌道的參
數每顆 GPS 衛星所傳送的星曆皆由 GPS 的地面監控系統所提供
衛星進入軌道運行之後其各種設備是否正常運作是否依預定軌道運
行等皆需要由地面設備來進行監測和控制
此外地面監控系統還有一個重要的工作就是保持各衛星處於同一時
間標準(即 GPS 時間系統)因此由地面監控系統監測各衛星的時間計
算它們的有關正數進而將導航訊息傳送給用戶以確保處於 GPS 時系
GPS 之操縱控制部分已於 1985 年 9 月完成整個控制部分包括了一個
主控站三個地面控制站五個監測站而五個監測站中的三個(Ascension
IslandDiego GarciaKwajalein)為地面控制站其擁有專有的地面天線
主控站位於美國科羅拉多州之 Springs主要功能為彙整監測站所蒐集
的資料並計算衛星的軌道與時間參數之後做軌道平滑處理並將資料傳送
至地面控制站然後在藉由監控站專用天線將資料上傳至衛星除此之外
衛星的控制與操作皆為主控站的主要任務
每個監測站均擁有一個GPS雙頻接收機標準銫原子鐘感測器及資料
處理機其座標都是經過美國國防製圖局精密測量而得每個監測站必須每
天24小時連續追蹤觀測每一顆衛星並將每一秒半之虛擬距離接收量及接收
所得之氣象資料及電離層資料聯合求解得每15分鐘一個平滑資料然後將
資料傳送至主控站主控站即整合個監視站之資料計算衛星星曆衛星時鐘
改正量及電離層改正係數等並且將所得結果彙集成導航訊息傳遞到地面天
線處再由地面天線傳送到各衛星上以更新衛星內的資料如此衛星即
可傳送新的資料給使用者接收使用如圖2-4
11
圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

222 控制部份(the control segment)
對於 GPS 導航定位而言GPS 衛星是一動態的已知點它是依據衛星
傳送的星曆計算而得所謂衛星星曆即是一系列描述衛星運動及其軌道的參
數每顆 GPS 衛星所傳送的星曆皆由 GPS 的地面監控系統所提供
衛星進入軌道運行之後其各種設備是否正常運作是否依預定軌道運
行等皆需要由地面設備來進行監測和控制
此外地面監控系統還有一個重要的工作就是保持各衛星處於同一時
間標準(即 GPS 時間系統)因此由地面監控系統監測各衛星的時間計
算它們的有關正數進而將導航訊息傳送給用戶以確保處於 GPS 時系
GPS 之操縱控制部分已於 1985 年 9 月完成整個控制部分包括了一個
主控站三個地面控制站五個監測站而五個監測站中的三個(Ascension
IslandDiego GarciaKwajalein)為地面控制站其擁有專有的地面天線
主控站位於美國科羅拉多州之 Springs主要功能為彙整監測站所蒐集
的資料並計算衛星的軌道與時間參數之後做軌道平滑處理並將資料傳送
至地面控制站然後在藉由監控站專用天線將資料上傳至衛星除此之外
衛星的控制與操作皆為主控站的主要任務
每個監測站均擁有一個GPS雙頻接收機標準銫原子鐘感測器及資料
處理機其座標都是經過美國國防製圖局精密測量而得每個監測站必須每
天24小時連續追蹤觀測每一顆衛星並將每一秒半之虛擬距離接收量及接收
所得之氣象資料及電離層資料聯合求解得每15分鐘一個平滑資料然後將
資料傳送至主控站主控站即整合個監視站之資料計算衛星星曆衛星時鐘
改正量及電離層改正係數等並且將所得結果彙集成導航訊息傳遞到地面天
線處再由地面天線傳送到各衛星上以更新衛星內的資料如此衛星即
可傳送新的資料給使用者接收使用如圖2-4
11
圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

圖 2-4 地面控制站與衛星的示意圖[15]
223 使用者部份(the user segment)
使用者部份所指的就是能夠接收 GPS 衛星訊號及資料處理的接收器
由於 GPS 的運用十分廣泛使用者部份可依照目的的不同而有所不同的功
能精度的接收器
當 1980 年第一台商用接收儀問世後經過這些年的發展由於其高精
度快速經濟全天候等諸多優點GPS 已成為最受歡迎的定位技術廣
泛的用於導航大地測量海上測量及製圖等領域甚至連那些過去與定位
不大有關聯的行業現在也採用 GPS 技術例如火車工業森林調查農
作物調查等等其受歡迎程度由此可見一般
隨著科技的快速發展GPS 衛星定位系統亦隨科技之進步而更新GPS
衛星定位系統乃電子技術及電腦工業的結合隨科技發展而進步最為神速
目前已研究開發出小巧輕便價格低廉而精度又高的迷你型 GPS 衛星
接收器如圖 2-5其大小已縮至與手持計算機一般大小並成為個人用導航
定位利器GPS 產品依照應用場合不同可以分為袖珍式背負式車載式
船用式機載式以及彈載式等類型的 GPS 信號接收器
12
圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

圖 2-5 GPS 接收器
23 衛星訊號結構
GPS衛星發射訊號包含有載波與信號兩種頻率利用衛星內部精密的
振盪器產生1023MHz 的基頻 並採用倍頻的方式產生L1載波與L2載波如
圖2-6載波L1與L2的頻率分別為
0f
L1=154 =157542MHz 0f
L2=120 =122760MHz 0f
同時可藉由這兩種載波調變為兩種虛擬隨機雜訊碼(PRN Cord)一種為
CA 碼長度為 1023 Chips頻率為 1023MHz所以每 1msec 可重複完整
的 CA 碼
另一種為 P 碼則由 X1 長度 15345000 Chips 與 X2 長度 15345037 Chips
所構成頻率為 1023MHz 故 P 碼重複一次的時間為 267 天
(15345000times153450371023times10E6)經過調變後的 GPS 載波上主要有 CA 電
碼P 電碼及廣播星曆三種訊息GPS 接收器經由這三種訊息便可計算出目
前所在的位置
13
圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

圖 2-6 衛星訊號結構[15]
231 衛星信號格式
模組每秒更新一次的高精確度輸出可用於需要精確時間測量場合一般
GPS 誤差小於 10 公尺使用 RTCM 標準的 Differential GPS(DGPS)誤差小於
5 公尺RTCM 為一國際性機構用以制定 GPS 接收器與各種無線電信標台
間的鏈結通信協定標準包括差分定位廣播協定本系統未使用 DGPS 協
定故誤差約為 10 公尺模組輸出的資料格式分析中由於 GPS 信號格式
有許多資料各自的開頭字串皆不相同其中移動系統選取的是$GPGGA 字
串開頭的資料所以在這裡將資料格式表示如下
$GPGGAlt1gtlt2gtlt3gtlt4gtlt5gtlt6gtlt7gtlt8gtlt9gtMlt10gtMlt11gtlt12gthhlt
CRgtltLFgt
lt1gtUTC(Universal Time Coordinated )國際標準時間(也稱為格林威治時
間)-格式固定為 hhmmss
lt2gt緯度-格式固定為 ddmmmmmm(高位元的 0 不會省略)
lt3gt緯度南北半球表示N-北半球或 S-南半球
lt4gt經度格式固定為 dddmmmmmm(高位元的 0 不會省略)
lt5gt經度東西半球表示E-東半球或 W-西半球
lt6gtGPS 指示0-資料無效1-GPS 信號(資料有效)2-DGPS 信號
14
(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

(資料有效)6-估測中
lt7gt接收到衛星數目 00~12(高位元的 0 不會省略)
lt8gt水平精確性 05~999
lt9gt天線高度位於高於低於平均海平面高度-99999~999999 公尺
lt10gt地平面高度-9999~99999 公尺
lt11gtDGPS(RTCM SC-104)資料時間最後有效的 RTCM 傳送至今
所經過的秒數(非 DGPS 則無此欄位)
lt12gtDGPS 參考站 ID-0000~1023(高位元的 0 不會省略非 DGPS 則
無此欄位)
所以程式首先判斷程式暫存區的簡訊開頭字串是否為$GPGGA開頭字
串不是$GPGGA表示非移動系統所發出的定位信號程式將不處理結束處理
副程式反之程式會顯示國際標準時間移動系統的所在經緯度GPS指示
及衛星數目其中的國際標準時間比台灣的本地時間慢8小時所以處理方式
就是將國際標準時間的小時數加上8後除24取餘數即可最後舉2個範例說明
程式處理GPS格式的方式
範例1有收到GPS 信號情況
訊息$GPGGA06404625011254N121328535E1
0710405M171M7E
分析國際標準時間064046本地時間144046
緯度25011254N(北半球)
經度121328535E(東半球)
GPS指示(1)GPS 信號衛星數目07 顆
範例2沒有收到GPS 信號情況
15
訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

訊息$GPGGA06044425036454N121387213E000MM56
分析國際標準時間06 0444本地時間14 0444
緯度25036454N(北半球)
經度121387213E(東半球)
GPS 指示(0)資料無效衛星數目00 顆
24 衛星定位原理
GPS 的定位是利用衛星基本三角定位原理GPS 接收裝置以測量無線電
信號的傳輸時間來量測距離以距離來判定衛星在太空中的位置這是一種
高軌道與精密定位的觀測方式此距離的測量以 GPS 衛星發射的訊號為基
礎以發射端及接收端同步的原子鍾計算傳送時間從衛星傳送訊號至接收
端計算得到距離及時間進一步計算出接收端的位置與速度
在定位定位量測方法中有虛擬距離(Pseudorange) 觀測與載波相位
(Carrier phase) 兩種方式但虛擬距離觀測比較適合即時的定位因此我們
採用虛擬距離觀測應用於在導航定位上虛擬距離是利用 GPS 接收器本身
所產生的 GPS 複製電碼和所接收到的衛星訊號電碼相關性而得到時間延遲
(Time Delay) 或時間偏移(Time Shift) 與光速的乘積轉換成距離由於此距
離受到存在於衛星和 GPS 接收器的時錶差影響故與實際的距離會有一偏
差量的存在加上實際量測者亦含有偏離量之時間遲滯故稱之為虛擬距離
假設衛星於b時刻發送出訊號而GPS接收器於a時刻接收到訊號如圖2-7
所示則訊號傳播的時間延遲如下
)()( rasbab ttTT ΔminusminusΔminus=minus= τττ
)()( tt Δminus srab Δminusminus= ττ (1)
τ 表GPS 時系
16
rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

rtΔ 表接收器之時錶誤差
表衛星之時錶誤差 stΔ
則虛擬距離的計算如下
τρ cPR =
)()( srab ttcc ΔminusΔ+minus= ττ
sr tctcR ΔminusΔ+=
RR Δ+= (2)
PRρ 表虛擬距離(Pseudo-range)
R表衛星到接受器的真實距離]
圖 2-7 虛擬距離時間測量
(3)
表第 a顆衛星瞬間的軌
C表光速
若在一瞬間同時接收到三顆以上的衛星訊號則透過廣播之衛星星
曆
asR ZZ minus (4)
同理可求得接收器對 bcd 衛星的關
2222 )()()( asR
asR
asR ZZYYXXR minus+minus+minus=
)( aS
aS
aS ZYX 道位置
)( RRR ZYX 表接受器的瞬間位置
即可解出衛星瞬間的軌道位置 )( SSS ZYX 代入式(3)中即可求得接收
器對第 a 顆衛星的關係式如下
)()( asR
asRa YYXXR +minus+minus= 2222 )(
係
17
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-
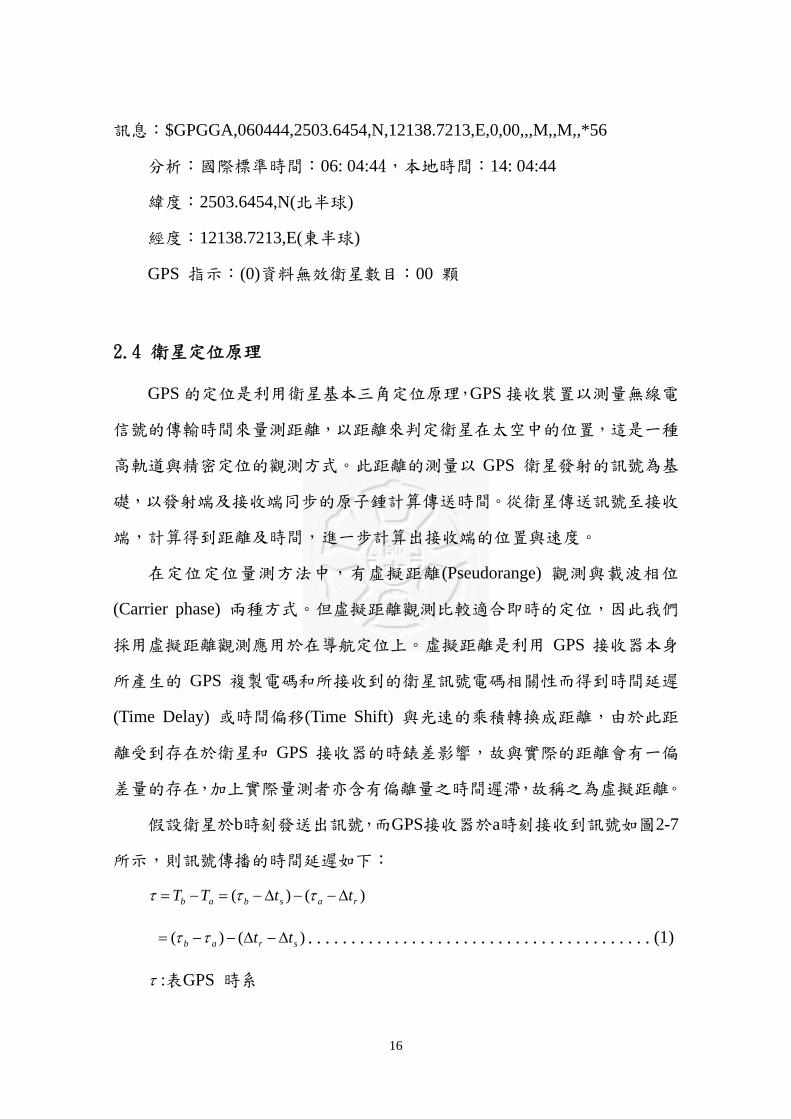
2222 )()()( bsR
bsR
bsRb ZZYYXXR minus+minus+minus= (5)
其中 Sc
ScS YX SS 為衛星abc
d 的瞬間軌道位置
2222 )()()( csR
csR
csRc ZZYYXXR minus+minus+minus= (6)
222 )()()( dsR
dsR
dsRd ZZYYXXR minus+minus+minus= 2 (7)
)( aS
aS
aS ZYX )( b
Sb
SbS ZYX ) cZ )( ddd ZYX( S
可由衛星廣播星曆中求得 c dR 為衛星a
bcd 到接受器的真實距離且以 ctcR
aR bR R
srPR tΔ+Δminus= ρ 代入上式中因虛
擬距離 PRρ 可由量測求得且同一接收器具有相同的時錶誤差 rtcΔ 且每個
stcΔ
瞬間位置並且消去接收器時錶誤差
衛星時錶誤差 幾乎相等所以由上式聯立求解
41 GPS 的誤差分析
位時由於訊號並非在理想狀況下傳送故衛
星訊
圖2-8 GPS的誤差[1]
我們可以求得接收器之
2
我們在利用GPS 進行定
號傳送便產生誤差如圖2-8所示此外GPS 系統整體也有各種電子或人
為的誤差由於這些誤差造成計算過程中得到錯誤的定位而影響GPS 定
位精度的因素可分為以下的幾個原因
18
一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

一 衛星軌道誤差一般以GPS 衛星的次資料框23 所輸出的軌道定位
導航參數經由數學模式運算所解算出的衛星位置偏差約為80M若
經由特殊管道取得更精確數值則可使誤差降至10M
二 衛星時序誤差(Ephemeris Error)每顆GPS 衛星上各配有高精度的原
子鐘但是原子鐘的時間並非完全與GPS 時間同步而且由地面站所
傳送的修正值亦並非完全正確故每顆衛星均存在一時錶偏差
三 接收機時表偏差(GPS 接收機與GPS 衛星一樣
四
一
五
減
七
所以並不會受到影響但是相位的週波
八
Receiver Error GPS)
係由本身的振盪器產生時序兩者間時序的偏差將造成定位的偏差
電離層折射延遲電離層的分布約為地表上方100 至1000 公里左
右而電離層的效應大小與電離層中的電子分布太陽黑子有關
天之中以中午時間其效應最大約為50~60nsec (約15~18米)
對流層效應(Aerosphere Error)對流層一般分為上下兩部分其中以
下層(0~40 公里)對電波影響較大上層對流層(40~80 公里)之影響微
小可忽略不計而下層對流層又可分為乾濕兩層其中乾層延遲佔全
部延遲的80 以上
六 多路徑效應(Multipath Error)當接收機的天線附近有大型反射物體
時衛星發送的電波訊號就容易被反射造成訊號干涉的現象使得
觀測之虛擬距離產生誤差一般可達10~20 公尺其消除的方法為
少接收機附近的反射以及儘量使用高仰角的衛星
週波脫落在使用GPS 定位時當衛星的訊號被遮蔽時接收器便無
法追蹤到衛星訊號待訊號再被接收到時相位訊號的小數部分因
為是由鎖相迴路所計算得出
整數部分則無法得到正確值此整數部分的不正確稱為週波脫落
相位中心位移在天線接收定位訊號時所定位的位置與其相位的中心
並不一定重合此定位偏差稱為相位中心位移
19
第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

第三章 GIS 地理資訊系統發展概況
域GI
(Remate)
(Computer
統能夠發展成為一套熱門的學問在於其本身可以有效的解決各方面的難
題滿足人類的 指出自己身
在何
投影只是分帶縮小為
經度
由於地理資訊系統的應用範圍廣泛所以GIS 並不是一個獨立的研究領
S 的技術其實是集合了電腦繪測(Computer cartography)遙感探測
資 料 庫 管 理 (Database management) 以 及 電 腦 輔 助 設 計
-aided design)等四個領域的技術精華而成由於各種領域的技術背
景並不相同所以各種領域上的學者對GIS 的看法都不儘相同地理資訊系
需求當我們處在不熟悉的環境時能夠明白的
處時就得靠我們所定義的座標系統來決定
座標系統大致上又可以分為兩大類第一種為〝相對座標〞我們可以
利用一個已知的顯著座標來表達出我們所要求得的位置舉例來說面對台
北火車站左邊算起的第三棟大樓另一類就是〝絕對座標〞目前世界上所
認同的座標系統計有(1)經緯度座標(2)世界橫麥卡脫座標(Universal
Transverse MecatorUTM)等等但是我們在使用這些座標系統時最重要的
考量問題便是精度上的要求因為每一種座標系統本身都有其精度範圍的
限制因此台灣地區現行座標的計算仍採用橫麥卡托
二度以赤道為X 軸以東經121 度為中央經線(即Y 軸)尺度比例為
09999但如此會有部分地區落於座標的第三象限故將Y 軸西移250000
令X與Y 座標同為正值簡稱TM 二度座標系統如圖3-1之座標系統所示
由於現代人生活步驟緊湊忙碌時間就是金錢的觀念深植人心所以凡事都
講求快速有效率但是根據統計的結果顯示通勤者最頭痛的問題就是塞
車因此地理資訊系統利用的空間與屬性資料整合發展出最佳路徑的尋找
除了用來分析最適當的替代道路來導引駕駛者的行車路線本身也包括了旅
行者推銷問題(Traveling Salesman Problem)尋找最近的服務設施(Find the
Closest Facility)等等
20
圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

圖3-1 台灣地區 TM座標系統
31 衛星座標系統與轉換
由於 GPS 收到的資料為全球通用的 WGS 84 訊息格式因此為使定
位資料能夠更加精確必須將 GPS 地心座標系統 WGS 84 橢圓座標如圖 3-2
之三維座標緯度經度及幾何高為
02
)( Hλϕ 經過座標轉換為台灣地區現
行的大地座標系統 GRS 67 如公式 123轉換流程如圖 3-3 所示
亦即台灣常用的二度分帶橫麥卡托投影(TM2 二度分帶)做為行車時的參考
)( ZYX
圖3-2 WGS84橢圓座標
21
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-
H( )λϕWGS84
X
圖3-3 座標轉換流程
(1)
(2)
(3)
λϕ coscos)( HNX +=
λϕ sincos)( HNY +=
ϕsin])1([ 2 HeNZ +minus=
21
22 )sin1(
ϕe
aNminus
=
)1( fab minus=
abae
21
22 )( minus=
參考橢球體之長軸半徑
參考橢球體之短軸半徑
扁率
式4再由WGS84 YX
WGS
m
m
GRS ZZYYRS
ZYX
ZYX
ZYX
⎥⎥⎦⎢
⎢⎣ minus
minusminus
++⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ΔΔΔ
=⎥⎥⎥
⎦
⎤
⎢⎢
旋轉參數矩陣=
ab
f
公 )Z 模式轉換成GRS67 )( ZYX
(
848467
)1(
WGSm
m
mXX⎥⎤
⎢⎡
⎢⎡
(4)m⎣
R⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
minusminus
minus+
11
1
XY
XZ
YZ
εεεεεε
XΔ YΔ ZΔ 平移參數
座標 X mY mZ WGS84之重心m
WGS84 )( ZY
XGRS67 )( ZY
GRS67 )( Hλϕ
TM2(EN)
22
S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

S 尺度參數 公式567由GRS6 模式轉換成GRS677 )( ZYX )( Hλϕ )(tan 1
XYminus=λ (5)
)cossin(tan 32
21
μμεϕ
aePbZ
minus+
= minus (6)
NPminus=
ϕcos(7) h
其中 22 YXP += )(tan 1
PbZaminus=μ
bba 2
122 )( minus=ε
得到 GRS 67 )( Hλϕ座標 之後將之轉換成國內常用的投影方式亦
M 二度分帶)之平面座標(EN)
公式 8 所示
車時的 考將 GPS
即台灣所使用的二度分帶橫麥卡托投影(T
9如
計算出距離時速及預估所到達的時間作為行 參
的資料傳送到電子地圖中即時在地圖上顯示出車輛所在地位置監控台上
功能表則包含了車輛狀況即時更新聲音撥放客戶基本資料路線規畫
行車記錄查尋車輛即時追蹤等功能
)])(tantan185(
cos))(tan(
542
532
λϕϕ
ϕλϕ
Δ+minus
ΔminusN
R (8)
1201
cos61)cos[ 3
0 λ
+
++
NM
NNs
RR
RRK ( ϕϕ Δ=WE
)])(tan5(cossin241
)(cossin1)6sin()4sin(
)2sin()(1([
223
2
2
λϕϕ
λϕϕϕϕ
ϕϕ
Δminus+
Δ+minus+
minusminus=
NRDC
BAeaKN
(9) 2
0
NR
其中 642
256175
6445
431 eeeA +++=
23
642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

642
512525
1615
43 eeeB ++=
64
256106
6415 eeC +=
6
25635 eD =
TM 二度分帶橫座標偏移量其值為西移 250000m
TM 二度分帶之中央經線比率其值為
子午圈曲率半徑
sW
09999 0K
MR
24
第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

第四章 GSMGPRS 無線行動通訊技術
41 GPRS 網路的發展方式
無線行動通訊在過去二十年內快速的發展許多無線行動通訊的規格
都陸續的被制定出來各個標準間的調變方式操作頻譜都不盡相同
GSM(Global
for Mobile Communications) 行動通訊系統許多優異的特點加上全
GSM 通訊標準所以 GSM 成為目前最流行的行動
使用人數也是最多 GSM 中的 Global即代表在最初制定 GSM
GSM 能成為通行全球的通訊系統
一般而言 GSM 通訊系統上的資料幾乎皆為語音通話雖然 GSM 通
訊系統也能傳送數據資料但是 GSM 系統在傳輸數據資料時卻有相當多的
侷限於語音的通話應用
與封包交換兩種傳
smitter)與接收端
(Rec
如圖4-1所示
標準
造成各標準彼此間的適用區域與使用時機也不一樣但由於
System
世界很多國家都採用
通訊系統
通訊系統時希望
缺點這些缺點包括大部分都僅
大體而言GSM 通訊系統上的皆為語音通話屬於電路交換GPRS 網
路內則同時具備有電路交換與封包交換兩種傳輸型態
在詳細介紹 GPRS 網路前必須先提到網路上電路交換(Circuit-Switch)
與封包交換(Packet-Switch)兩種資料傳輸型態不同的資料傳輸型態造成應
用服務的資料流量(Data Flow)方式也不同 GPRS 網路與 GSM 網路的最
大差異就在於 GSM 網路內只有電路交換的傳輸型態當 GSM 網路升
級到 GPRS 網路後 GPRS 網路內就同時具有電路交換
輸型態了
一電路交換(Circuit-Switch)
電路交換(Circuit-Switch)的方式是在網路發送端(Tran
eiver)間建立了一個固定的通道不管發送端有無資料傳送網路都在
通道上保留固定的頻寬與通道等網路資料供發送端使用
25
4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

4-1 電路交換型態[16]
以
通道的連線時間計費當應用服務需要固定的資料傳輸速率或對延遲非常
敏感(Sensitivity)時較適合使用此資料傳輸型態
二封包交換(Packet-Switch)
封包交換(Packet-Switch)是發送端(Transmitter)將資料切割成一段段的封
包並且發送端將每一個封包內註明接收端(Receiver)的位址後傳送到網路
上再根據封包內所包含之位址將封包傳送到接收端的所在位置 接收端收
到封包後再將封包重新組織
它的優點是多個發送端能夠同時間共同使用一個傳輸通道增加通道上
傳輸型態
傳送數據資料但是 GSM 系統在傳輸數據資
圖
電路交換優點是傳送資料不會受到其他使用者的傳送資料所影響因此
通道上每筆資料的延遲時間皆非常固定缺點是對通道的利用率不高且
起來
的利用效率如圖 4-2 所示缺點是當所有發送端同時傳送資料時此時傳
輸通道上的資料會出現擁塞的現象造成資料到達接收端的延遲時間不一
致當應用服務傳送的資料流量並非一直持續不斷的送出而是在偶發性
(Bursty)的時間傳送時較適合用封包交換這種資料
雖然 GSM 通訊系統也能
料時卻有相當多的缺點而且數據的傳輸速率卻只有 96Kbps每次傳輸數
據資料時都必須撥接上網費用是以連線時間的多寡來計費費用從開始
26
圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

圖 4-2 封包交換型態[16]
撥號到建立完成一個連線需要耗費太多的時間等種種的因素都造成GSM
通訊系統的數據傳輸服務應用可說是乏人問津其比 1
GSM GPRS
較如表4-
表 4-1 GSM 與 GPRS 的比較
傳輸方式 Circuit switch Circuit switch Package switch
速度 96 Kbps 160 Kbps 非語音 簡訊(有字數限制) 資料量無限制
主要用途 語音傳輸 資料傳輸
計費方式 依通話時間 依封包個數
其他 同
料傳輸擇一傳輸
時使用語音
與資料傳輸
時間只能語音與資 可同
相較於網際網路 Internet 的高速傳輸速率及區域網路(LAN)上的電腦
隨時連接網路收費低廉等特點簡直是天壤之別這是現今 GSM 通訊系
統的數據傳輸應用仍無 eneral Packet Radio
Service) 網路的發展目標就是為了要改善 GSM
點從 GSM通訊網路升級到 GPRS 網路非常簡單 GSM 網
路增加SGSN GGSN 兩 路節點設備 原有的 GSM
通訊設備仍然保留因此當 升級到 G 即可做大
量的資料傳輸了理論上來說最高速率可達到 1
法普及的主要原因因此GPRS(G
網路傳輸數據資料的缺
只要在現有的
以及 個新的網 如圖4-3
GSM 網路 PRS 網路後
60 Kbps
27
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-
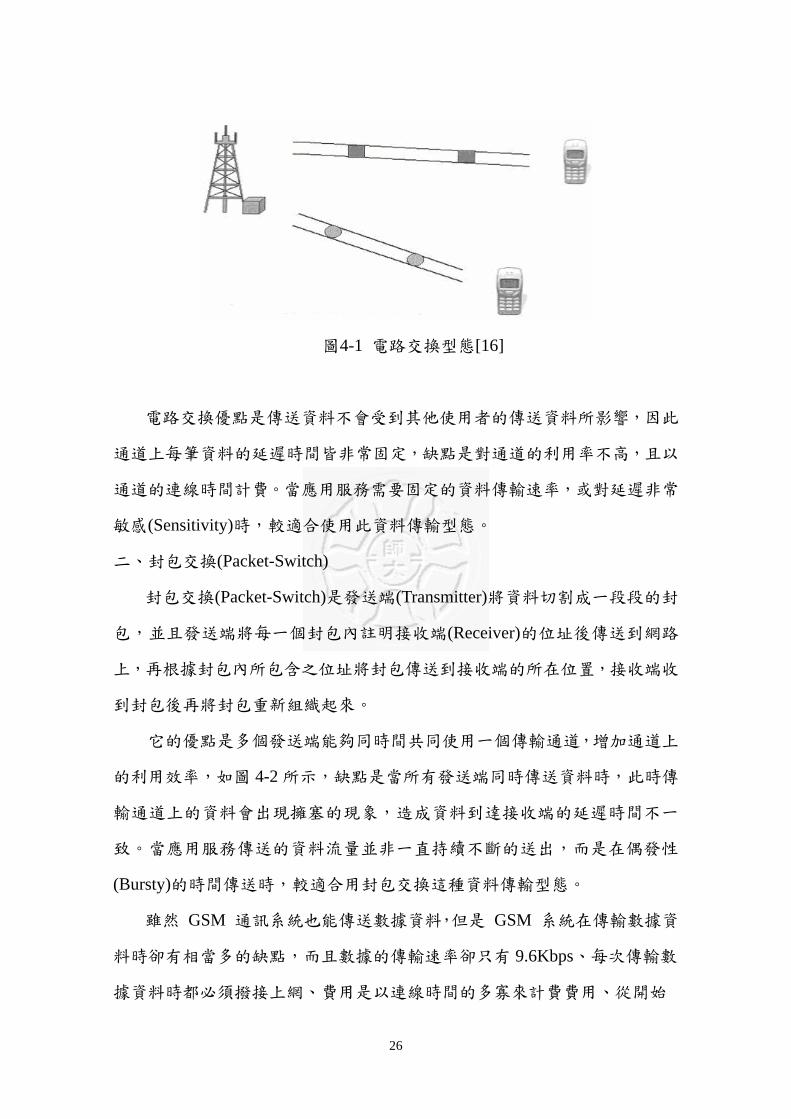
圖4-3 GPRS 網路能同時進行電路交換與封包交換兩種傳輸方式[16]
台灣地區 GSM 目前普遍使用的頻帶為900MHz與1800MHz於市區
中GSM900的一個 CELL 涵蓋約800~2000公尺而GSM1800的 CELL則
涵蓋約400~900公尺於郊區GSM900的一個 CELL 涵蓋約5~10公里而
GSM1800的 CELL 則涵蓋約2~5公里加上全台灣的基地台的分佈皆相當密
集不論到哪個角落都能收的到訊號因此非常適合作行動數據回報的傳輸
媒介這也是本論文選擇 GPRS (無線分封數據服務)的原因
28
第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

第五章 車輛監控系統架構與移動系統的介紹
1 車輛監控系統的整體架構
本論文採用 ARM 7 CPU 和 BENQ M22 GSMGPRS 模組以及
Leadtek SiRFstartIII GPS 模組的車輛定位監控系統提出了在嵌入式平台上
實現車載資訊處理終端的開發方案詳細介紹了各個硬體和軟體模組的功能
實現方法
近年來對地域廣泛機動性強數量眾多的行動目標有效監控緊急
救援和各種資訊服務的需求在客運公安銀行物流管理等產業表現得
尤為突出全球定位系統技術的發展使得行動目標的即時定位成為可能同
無線通訊技術也得到了長足進展對行動目標進行遠端監控調度成為可
能特別 業務的出現使得人們能夠對行動目標進行全國範圍
即時全天候監控調度車輛監控系統之整體架構如圖 5-1 所示
5
和
時
是 GPRS
5-1
一 嵌入式移動車載 Client 用戶端包括中央處理單元 ARM 7 GPS 接
收機 GPS 天線GSMGPRS 手機模組車載 Client 終端能
圖 車輛監控系統之整體架構
夠進行
定位通話警報和即時監控等功能
29
二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

二 無線通訊數據網路無線數據傳輸設備 GPRS 則作為基地台與各行動
目標物進行資訊交換的樞紐是整個車輛監控系統中的重要組成部
份在此選擇了公用通訊網
三 數據中心監控中心即是所謂的監控台包含數據庫監控終端GIS
終端業務處理終端於此數據中心和監控中心處於同一實體位置
合併為一監控台同時處理兩者之業務監控台一方面接收從網路傳
來的數據資料並將其分門別類儲存起來另一方面則對數據資料加
以處理以顯示給使用者看以便進行隨時監控的動作
一
通訊模組)發送給中心此
二 資訊處理單元能對數據進行複雜
隨
為可能
不僅消 的應用並
且作
52 嵌入式移動車載系統之硬體架構
隨著嵌入式系統的發展發展出一個功率低體積小的系統變成一種可
能本文著重於嵌入式移動車載平台之實現進而結合監控台的功能來達
目前移動車載 Client 端從硬體構成來看可以分為兩類
以單片機作為核心處理器只能進行簡單的數據採集對數據不作太
多處理組訊框後透過無線數據機(或其它
即為嵌入式移動系統這種系統消耗功率和體積都很小功能有限
例如 8051 單晶片
車載電腦系統以普通 CPU 作為
處理如數據庫查詢和更新等但是這種系統功耗和體積都很大很
多場合不便於使用
著行動運算技術的迅速發展開發一種功耗低體積小的車載系統成
本論文中開發的終端採用了嵌入式的 CPU 和作業系統整體系統
耗功率很低而且體積也大幅縮小非常適合作車輛監控
為一種平台系統它還具備不錯的資訊處理能力
30
成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

成車輛管理監控之目標
入式移動平台架構包含 Leadtek SiRFstarIII GPS 全球衛星定位模組
22 GSMGPRS 無線通訊
嵌
Benq M 模組Arnux 7511 ARM 7 TDMI CPU 核心處
理器
透過 GPS 衛星
收器接收來自衛星的定位訊號再加上車輛 ID 與車輛上的事件描述後
再透過 GSMGPRS 模組把加工後的定位資訊經由 TCPIP 網路上傳至監
控台讓管理者能夠隨時掌握車輛的一舉一動並於必要時與之聯繫了解
車輛運行狀況或進行新路線的派遣及更換
ARM 7TDMI CPU 為核心所
發展的 ARNUX 7511 開發版如圖 5-3周邊介面豐富低功率消耗
等三大部分主要是利用 Arnux 7511 ARM 7 CPU 為核心來進行系統的
控制其周邊介面豐富最重要的是功率消耗低這對於車載系統而言或者
手持式行動運算設備來說都非常重要因為這些設備普遍採用電池供電低
功耗消耗保證了設備的高可用性以及可以長時間的使用
接
達到車輛管理的目的若是發生
緊急狀況時也能進行全程錄音對於嵌入式移動平台的架構如圖 5-2 所示
對於每一個模組詳細的過程將詳述於下
圖 5-2 嵌入式移動車載平台的架構圖
一 系統中央處理單元採用研廣公司開發以
Benq M22 GSMGPRS
module
Leadtek GPS module
Reporting Center
PC Arnux 7511 Arm 7 CPU
3x4 Keypad
Switch 74HC244
31
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-
這對於車載或者手持等行動運算設備來說非常重要因為這些設備普
遍採用電池供電低功耗性能保證了設備的高可用性
圖5-3 ARNUX 7511實體圖
GPRSGSM 單元在本論文中採用了 BENQ M22 GSMGPRS Module
如圖 5-4該系列 GPRSGSM 模組能夠支援語音數據傳
二
真等功能
可以滿足系統的設計要求支援串列埠 RS232 通訊直接經由串列埠
RS232 即可對其下指令控制在 GPRS 不可用的地區還可以透過
GSM 短消息傳輸數據
圖5-4 BENQ M22 GSMGPRS Module實體圖
32
三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

三
如圖 5-5該款接收裝置的幾個重要參數如
下熱啟動時間<18sec冷啟動時間<42sec位置誤差小於 10m
數據更新率為 1 秒次連續更新並能輸出 NMEA-0183 格式定義的
二進制格式數據可以滿足普通車輛監控管理定位系統要求
GPS 接收裝置為簡化整個系統的設計本設計採用了 Leadtek
SiRFstartIII GPS 接收裝置
圖5-5 GPS Module實體圖
53 嵌入式移動系統韌體程式結構與流程
在介紹完嵌入式移動系統的硬體後接下來接著介紹其韌體程式構成
由於嵌入式移動系統包含 GSMGPRS GPS 並且使用 ARM 7 為作為
數據資料的處理核心 CPU 因此程式的撰寫必須能進行 GPS 數據資料的
採集處理與傳輸應用處理完的數據資料再經由對 GPRS 模組透過網路
傳送至監控台監控台再將從車載端收到的數據資料加以分析與顯示而在
介紹程式流程前則必須先了解整個車輛監控系統之規格與嵌入式移動車載
系統的操作流程才行
一 車輛監控台規格
(一) 行車紀錄建檔功能
1 出發位置與時間之紀錄
33
2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

2 終點位置與時間之紀錄
option)
間
(四
nor)
二
(一 RS 傳至主控台並送出
已從起點出發並陸續的傳送 GPS 定位資
(二 S 接收到的數據資料經 GPRS 傳至主控台並送出
與 ID Number 代表已到達中繼點出發並陸續的傳送 GPS
(三 將 GPS 接收到的數據資料經 GPRS 傳至主控台並送出
代表已達終點並停止傳送 GPS 定位資料
3 中途站位置和到達時間之紀錄
4 平均車速(行駛距離花費時間)
5 GPS 座標回報紀錄(可設定紀錄的間隔時間)
(二) 行車紀錄尋找及列表功能
(三) 即時車況
1 車輛位置即時回報
2 通話功能
3 監聽功能(mute)(錄音為
4 車速回報
5 預估到達目的地時
) 車輛異常即時回報
1 停靠站停留過久警示(mi
2 車輛緊急救助警示(major)
嵌入式移動車載系統規格
) Start Button將 GPS 接收到的數據資料經 GP
Start 信號與 ID Number 代表
料
) Transit Button將 GP
Transit 信號
定位資料
) Stop Button
Stop 信號與 ID Number
34
(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

(四 緊急訊號讓監控台得知狀況並作適當應
全程錄音以便日後調查之用當緊急狀
(五)
(六) 終止語音通話
以
格接著介紹嵌入式移動車載系統之操作流程 於出發點按下 Start
Bu
定位座
標最
位信號
路況或告知注意事項等若
遇 y Button 經 GPRS 發出緊急訊號並開始連
續地傳送 GPS 定位信號與語音信號而主控台也將採取緊急應變措施開
啟即
程包含 3x4 鍵盤掃描 M22 GSMGPRS Module 初
始化
只要 PC 端開啟超級終端機(Hyperterminal) 將鮑率調至 115200
baud
) Emergency Button發出 911
變措施且開啟錄音功能進行
況排除後再按一次 Emergency Button 即可解除緊急訊號的發送
語音撥號與監控台以語音方式聯繫
掛斷
上是整個車輛監控系統的車載Client端系統規格與車輛監控系統之規
tton 接收 GPS 信號經 GPRS 告知監控台出發地點並開始陸陸續續傳送
標給主控台
當到達中繼站時按下 Transit Button 傳送到達中繼點之信號與定位座
後至終點時按下 Stop Button 告知監控台已到達並停止傳送 GPS 定
途中司機可與監控台以語音方式聯繫報告
緊急狀況可按下 Emergenc
時車況追蹤與錄音功能掌握現場的情況並作最好的處理
清楚了所有的操作流程後才能對韌體程式的撰寫有初步的構思經過
不斷地測試才能實現
韌體程式之撰寫流
74HC244 SWITCH 的切換 GPS 數據資料接收 M22 GSMGPRS
Module 之控制等幾個區塊由於 ARNUX 7511 COM1 預設鮑率為 115200
baud因此
資料位元(Data bit)為 8 bit停止位元(Stop bit)為 1 bit即可與之連接
35
為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

為了利用剩下的 COM2 同時連接 GPS 與 GPRS 所以需要 74HC244
作切換用
GPS 接收器支援標準的 RS232 協議因此不用改動任何驅動程式即可
實現 GPS 數據的讀取 NMEA-0183 規定了 GPS 數據的輸出速率為 4800
baud
指令(AT Command)做一些設定設定結束後隨即撥接上網
與監
GSMGPRS Module 已
含有
因此程式首先要打開 ARNUX 的 COM2 設置串列埠速率為 4800
baud工作模式為資料位元 8 bit停止位元 1 bit而 M22 GSMGPRS Module
之串列埠具備了 Auto-baud rate 的功能其鮑率掃描範圍為 1200 baud 至
115200 baud所以不需更改 COM2 之鮑率就能與之溝通需注重的是
SWITCH 74HC244 切換動作的 Timing 要掌握好
串列埠開啟後接著就是對 GPRS 模組進行初始化初始化其實就是
對它下達 AT
控台連接並維持一直連線的狀態由於 GPRS 是以量計費不用擔心
維持連線會造成費用的負擔增加在網路傳輸方面採用 TCPIP 協議來傳
輸數據但是這是以犧牲一定的即時性為代價在行動 IP 環境下分組的
延遲時間可以達到 1000ms 以上即使這樣普通車輛在這個延遲時間內的
位置變化也是有限的可以滿足監控要求在制定數據傳輸格式時沒有加入
校驗字段這是因為 TCP 協議已經提供了很完善的錯誤檢驗重傳機制沒
有必要再加入訊框校驗字段而選用的 BENQ M22
TCIIP 的功能經由 GPRS 傳送出去的數據資料皆會包上 TCPIP 封
包省下了自己寫協定的時間
待一切就緒後剩下的就是 ARNUX 的工作了利用 ARNUX 的
GPIO 去作鍵盤掃描與 SWITCH 切換的功能鍵盤按鈕的功能基本上就是
嵌入式移動系統規格只是多了 POWER ONOFF 至於嵌入式移動系統
規格由於前面已提過在此便不多作贅述圖 5-6 所示即為程式流程基本架
構
36
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-
Client 端按鈕
圖 5-6 程式流程圖
54 即時監控系統程式介紹
即時車況查尋等副屬應用程式
當監控台端接經由網路 TCP 通訊協定收到用戶端 此時
先判斷即時車況事件是否啟動若啟動則將用戶端的 GPS 信號放入到電子
地圖中將即時車輛的位置顯示出來若是無啟動即時車況事件或是執行完
即時車輛顯示後判斷 GPS 的形式若為否則跳回
程式開頭處若為是則判斷該筆 GPS 信號有沒有收到衛星的資料若 GPS
沒有收到衛星資料則在主控台上顯示未接收到 GPS 衛星資料的對話
在啟動即時監控應用程式時首先主畫面會先產生一個安全性登入的應
用程式當輸入正確的密碼後則正式的啟動主應用畫面在主應用程式畫面
中還包含了用戶基資料行車歷史資料查尋聲音播放車輛路線設定
的 GPS 信號時
的信號是否為 GPGGA
37
盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

盒
式流程如圖 5-7最後將資料即時的顯示
在監
圖 5-7 主畫面程式流程圖
若有收到 GPS 衛星資料則取出信號中的車輛編號行車事件經度
緯度取出 GPS 的經度緯度後經由座標轉換公式將經度緯度轉換成二
度平面座標然後利用該平面座標算出車輛的行車距離車行的速度平均
行車速度及預估行車到達時間程
控端上如圖 5-8
將 GPS 的信號傳
送至電子地圖中
判斷即時車
判斷 GPS的信號是否開
頭為GPGGA
判斷 GPS 是否有
收到衛星信號
GPS 無信
號警告
將 GPS 信號中的
CarID 及 Event 取出
利用二度平面座標計算出距離速度預估到達時間
將 GPS 信號的經緯度轉成二度平面座標
將計算出的資料即時
顯示在 IOTable 中
況是否啟動
主畫面程式開始
否
是
否
是
利用TCP接收由GPRS送來的資料
否
是
主畫面程式結束
38
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-
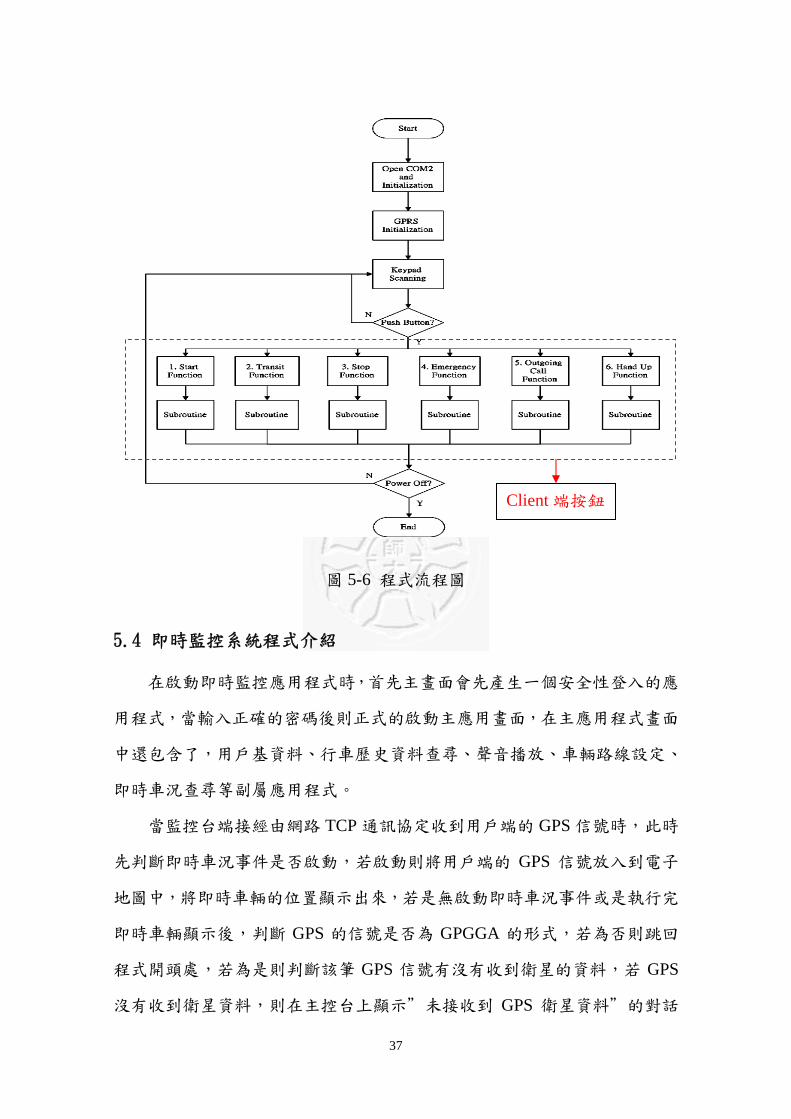
圖 5-8 即時監控主畫面圖
39
第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

第六章 操作說明與實驗結果
實驗成果主要分成兩個部分來進行一是實際路測二是對監控台的多
人連線測試以下分別就這兩部分之實驗成果作討論看是否合乎本論文所
要求達到之目標
一 實際路測
實驗目的
(1)測試嵌入式移動車載系統於實際道路測試時之穩定性與可靠度
(2)觀看監控台是否有正確地接收數據資料並進行監控
實驗步驟
嵌入式移動系統全圖則如圖 6-1 所示 首先從 Linux 主機將編譯完的程
式傳送到嵌入式移動系統 Client 端如圖 2當嵌入式移動系統 Client 端接
收到資料的時候透過終端機執行程式程式執行後馬上會開啟 COM2
等待使用者按下 Power On Power On 嵌入式移動系統接著就
進行初始化(Initialization)的動作如圖 6-3 所示
6-
一被按下
圖 6-1 嵌入式移動車載系統實體全圖
40
圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

圖 6-2 Linux 主機畫面
圖 6-3 終端機初使化程式
在此則先將監控系統過程分成車載Client端內部的運作情形畫面與監控
Server 端的運作情形做一個解說
一車載 Client 端內部運作情形
首先於出發點按下按鈕 1 傳回出發點訊號接著嵌入式移動車載系統會
自動地陸續傳回定位 回中繼點訊號數據資料到中繼站時按下按鈕 2傳
41
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-
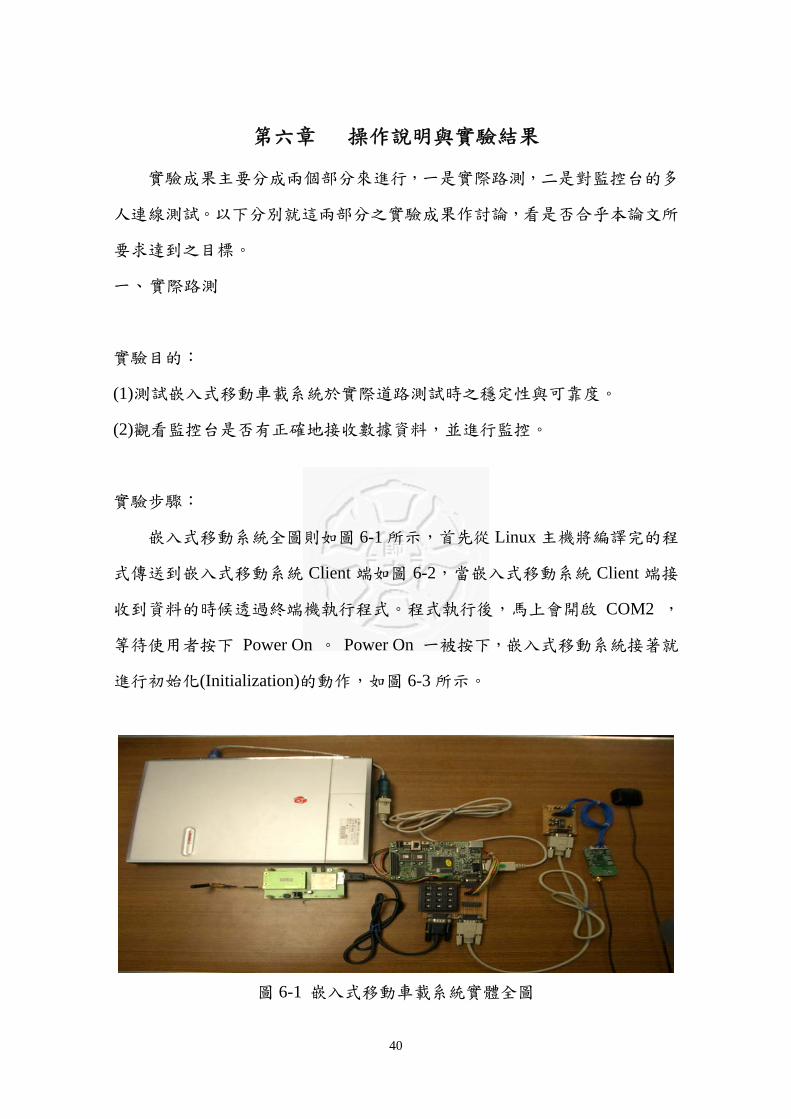
如圖 6-4 所示
圖 6-4 回傳中繼點訊號畫面
最後到達終點時按下按鈕 3傳回終點訊號並終止繼續回傳定位數據
如圖 6-5 所示
圖 6-5 回傳終點訊號定位數據畫面
緊急況發生時按下按鈕 4傳回緊急訊號並撥打語音通話回監控台進
42
行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

行錄音與監聽如圖 6-6
圖 6-6 緊急狀況發生時畫面一
錄音時間設為 30 秒30 秒過後又會再傳回定位數據資料至監控台如
圖 6-7 所示
圖 6-7 緊急狀況發生時畫面二
若是沒有於 3 秒內取消緊急狀況嵌入式移動系統會持續回傳定位數據
43
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-
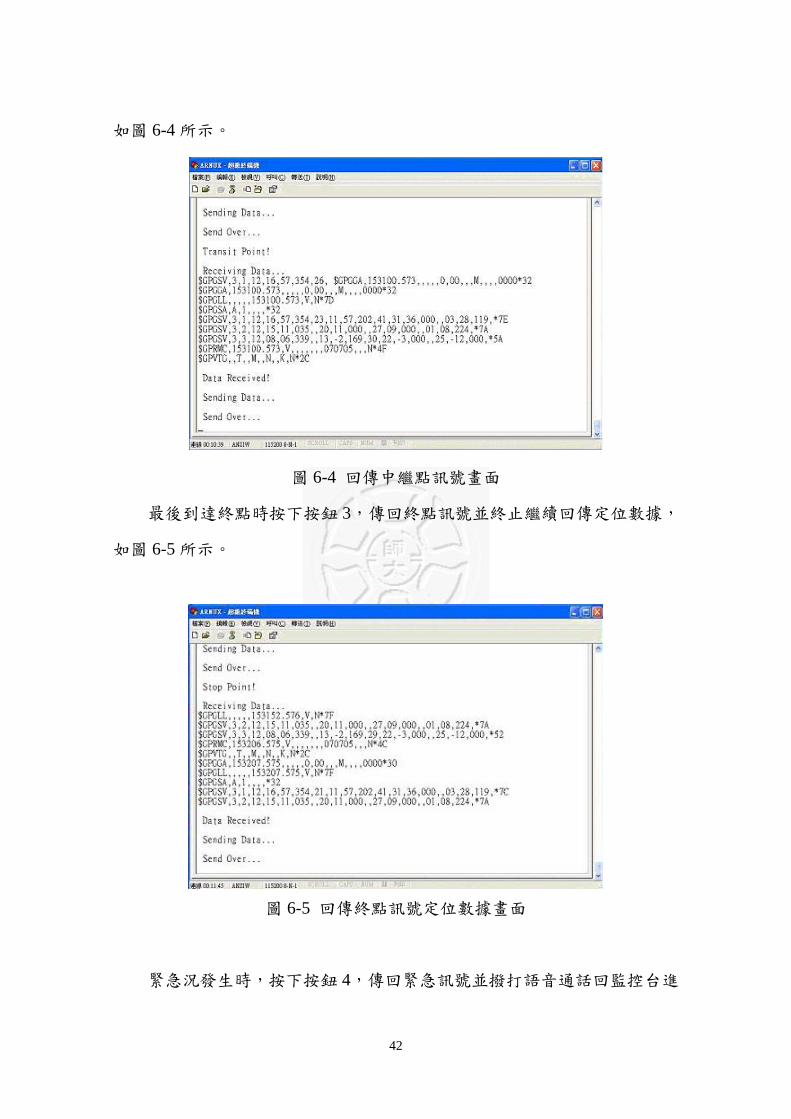
資料如此一直循環下去直到再次按下緊急按鈕將緊急狀況解除後才停
止如圖 6-8 所示
鈕 6 掛斷如圖 6-9欲停止程式按下 Power Off即跳出程
式執行如圖 6-10
圖 6-8 緊急狀況解除畫面
附帶一提途中若想與監控台聯繫可按下按鈕 5即可與監控台進行語
音通話按下按
圖 6-9 語音通話與結束畫面
44
圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

圖 6-10 Power Off 跳出執行畫面
二監控 Server 端的運作情
當嵌入式移動車載系統尚未與監控台連線時則監控台所呈現的為 Listening
狀態如圖 6-11 所示
形
圖 6-11 監控台處於 Listening 狀態畫面
等到 GPRS 初始化完畢之後隨即從 GPS 接收訊號透過 GP 上傳到網
路上此時監控端即可將車子的編號以及事件顯 6-12
RS
示在操作介面上如圖
45
圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

圖 6-12 車載端透過 GPRS 登入監控台的畫面
緊接著車載端開始將
如圖 6-13
而定位資料會存於資料庫 中以便日後可以作查詢監控等用途
GPS 定位數據資料回傳至監控台監控台在接
收到GPS資料後 則將顯示接收的資料先顯示在行車資訊記錄中
(Data Base)
圖 6-13 監控台行車資訊紀錄
由圖 6-13 可看出定位資料皆定時回傳至監控台中間並無間斷的傳輸
證明此實驗架構為可行最後再把定位資料利用 GIS 地理資訊系統於電子地
圖上顯示出來可清楚看到定位在台科大的電子資訊大樓如圖 6-14證明實
46
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-
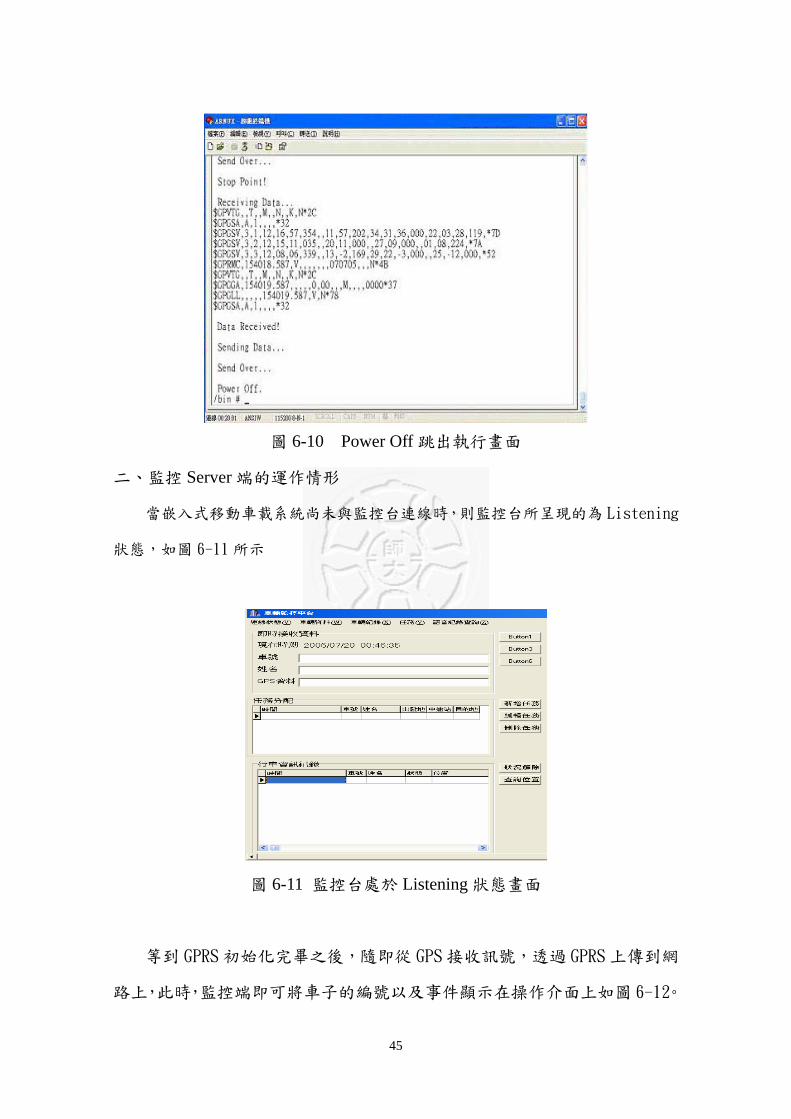
驗無誤
圖 6-14 大的電子資訊大樓
實驗結果
在實際路測方面路線規劃由台科大側門出發中繼站為中正紀念堂
緊急訊號測試為台北科技大學終點為復興南路與忠孝東路交叉口
的 SOGO 百貨如圖 6-15監控台接收數據資料並列於行車資訊紀錄詳細
情形如下所示
台科
監察院
圖 6-15 實際路測圖
起點
中繼點 終點
緊急狀況點
中繼點
47
圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

圖 6-16 地圖顯示出發點之畫面
圖 6-17 地圖顯示中繼點之畫面
48
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-
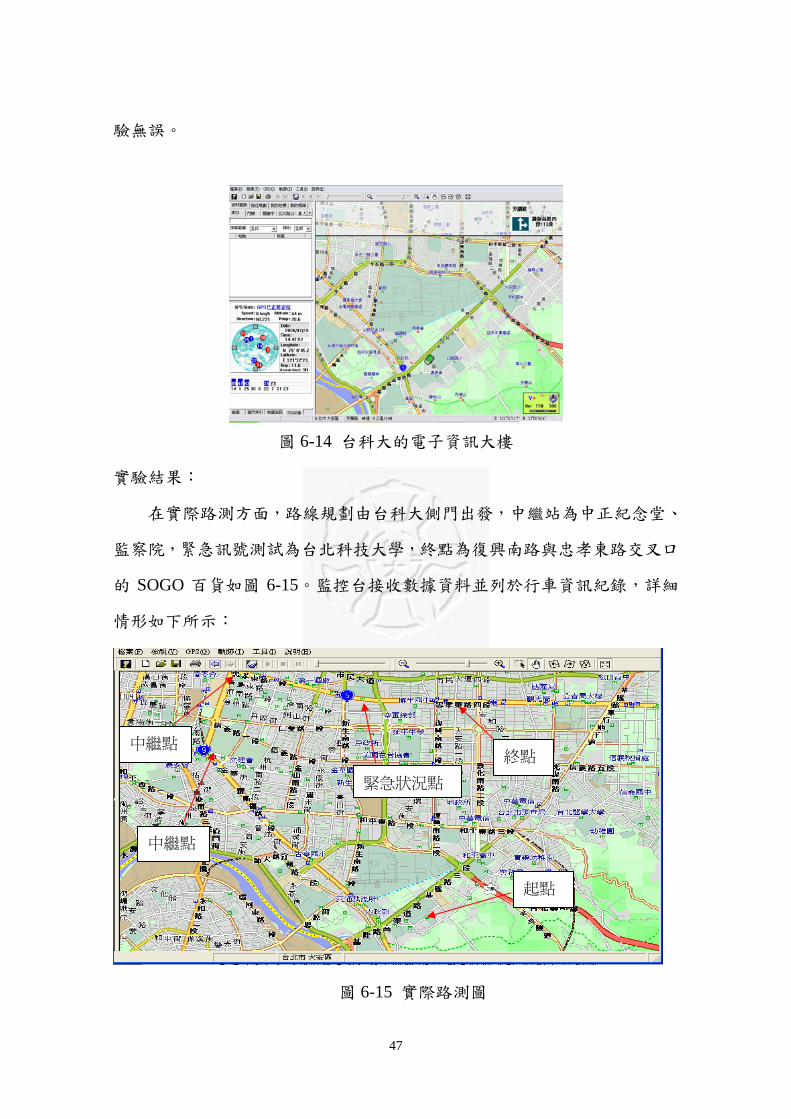
圖 6-18 地圖顯示中繼點之畫面
圖 6-19 地圖顯示緊急狀況發生時位置之畫面
49
圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

圖 6-20 地圖顯示終點之畫面
由以上結果得知即使是實際路測 嵌入式移動車載系統與監控台之間
數據傳輸非常順暢最後在地圖顯示的定位位置亦準確已達到本文車輛監
控系統之需求但這只是侷限於此路線的測試而已將來若要真正實現則
須對更多的路線進行測試
二 監控台多人連線測試
實驗目的
觀察監控台於多人同時連線時接收回傳數據資料之情形
實驗程序
嵌入式移動系統的連接與監控台初始的連線狀態皆於前面展示過了
在此不加以贅述本次的實驗著重於多人連線方面因此不須傳回出發中
繼目的地等訊號只傳回連續的定位資料並觀察監控台的接收情形
50
實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

實驗結果
監控台多人連線測試之結果如圖 6-21 所示結果證明多人連線於本系
統之可行性本次實驗僅以三人同時連線測試但實際的車輛有可能上百
台上千台因此未來若要實現仍需更進一步的測試
圖 6-21 監控台多人連線測試畫面
51
第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

第七章 結論與未來展望
且
GPRS 回傳車輛的定位資訊收費方式也以量計費非常符合經濟效益
而車載 Client 端整體測試之效能也呈現穩定的狀態但仍有許多可供改進
空間以下便就幾點提出討論
一 嵌入式移動系統車載端未簡化
本論文所實現的系統是將 GPS 模組GPRS 模組和 ARNUX 開發版結合在
一起但就 ARNUX 開發版來說有太多的周邊是用不到的而且以目前的技術
來講把 GPSGPRS 與 ARM 完全整合在一起並不是不可能的如此一來以後
的嵌入式移動車載系統就只是一盒餅乾盒大小而已達到真正體積小質量
輕便於攜帶之目標
二 GPS 定位技術之缺點
前面章節有提到 外硬體設備的優
點但仍存在著許多的缺點例如於都市區或郊區易被週遭障礙物阻擋訊號
造成遮蔽效應的產生導致定位準確度下降因此採取 DGPSAGPS陀螺
儀的慣性定位系統來提高車輛定位的準確度
三 新增監控設備的可行性
在前幾個章節有提到於緊急狀況時不僅僅是會連續傳回定位訊號嵌
入式移動 Client 端還會開啟語音撥號將現場的情況紀錄下來但若能傳
回車內的即時影像將會更加完善如此如遇到緊急狀況竊賊入侵駕駛者
打瞌睡等等都可以做一個最即時的錄影錄音存證
雖然 GPRS 在理論上傳輸速率可達 的速率但是實際上來說
不可能達到的因為在同一時間8個時槽不可能剛好只有你一個人在用
由實驗結果可知本論文所提出的大體架構是可行的將 GPS 接收之定
位資料結合車載端的資訊與緊急狀況利用 GPRS Module 透過網路傳至監控台
以進行車輛的監控與管理使用嵌入式移動系統車載裝置不但攜帶方便
透過
使用 GPS 定位技術雖然有不需增加額
171Kbps
是
52
而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

而是呈現與人共享 傳 bps甚至更少若
是要求傳回影像之品質則圖片解析度勢必不低GPRS 可能會不敷使用
所以未來若 3G 蓬勃發展後可改用 CDMA 方式來做影音影像的傳輸增加
車載 Client 端的監視設備使嵌入式移動系統能夠更加的完善
四 監控台負載探討
在實驗結果中嘗試使用多人連線方式來作實際車輛使用狀況的模擬測
試測試結果顯示監控台仍能夠正常接收來自車載端所傳送回來的資料並進
行監控但對於真正的車輛監控系統而言實際的車輛可能上百台甚至上
千台因此未來如要將此系統實踐則需要更強大的電腦系統來做支援對
於這方面的研究將會是非常重要的一項課題
本論文提出的架構在車輛監控系統來說只是屬於初步性的監控架構未
來科技的發展迅速車輛監控方面的設備將會更加的完善接合地理資訊
影音影像電子收費系統等等將會更加的人性化有效率相信各位有
志一同的學者能繼續朝此研究目標向前邁進使本研究更加精進
因此實際的 輸速率可能只有 50K
53
參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

參考文獻
[1] Michalski A Czajewski J ldquoThe accuracy of the global positioning
systemsrdquo IEEE Instrumentation amp Measurement Magazine Volume
RTO 7 Washington DC
] C B Harris〝Digital Map Dependent Function of Automatic Vehicle
Location Systems〞 IEEE PLANS ` pp552~561 1988
[6] H A Karimi E J Krakiwsky C B Harris G Craig and R Goss
〝Arelational Database Model For An VL System And Expert System For
Optimal Route Selection 〞 Baltimore Maryland March 29-April 3
pp584~593 1987
[7] E J Krakiwsky 〝GPS and Vehicle Location and Navigation〞 GPS
WORLD May pp50~53 1991
[8] ColAnil Gogate BShelesh Sagai v and SGanesh Vaidyanathan
ldquoMonitoring And Transmission Of Heavy Vehicle Parameters Using Fixed
Cellular Terminalrdquo IEEE Vehicular Technology Conference Vol 6 pp 4100
7 Issue 1 Mar 2004
[2] E J Krakiwsky H A Karimi C Harris and J George 〝Researchnito
Electronic Maps And Auto-Matic Vehicle〞 AUTO-CARTO 8 Baltimore
Maryland pp572~583 March 29-April 3 1987
[3] D F Cooke 〝Vehicle Navigation Appliances〞 Proceedings on Digital
Representations of Spatial Knowledge AUTO-CA
March 11-141985
[4] L Robert 〝Automobile Navigation In Thepast Present And Future〞
AUTO-CARTO 8 Baltimore Maryland pp542~551 March 29-April 3
1987
[5
A
de
54
- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-

- 4102 Sept 2004
[9] Lahrech A Boucher C and Noyer J-C ldquoFusion of GPS and odometer
[10] ing Tang Hong Cheng Qing Li Guanpi Lai
2001
ortation Systems Vol 5 Issue 3 pp 8 - 218 Sept 2004
Automation Vol
[14]
[15] uedutwgps1htm
measurements for map-based vehicle navigationrdquo IEEE Industrial
Technology Vol 2 pp944 - 948 Dec 2004
Nan-Ning Zheng Shum
Fei-Yue Wang ldquoToward intelligent driver-assistance and safety warning
system rdquoIEEE Intelligent Systems and Their Applications Volume
19 Issue 2 pp8 ndash 11 Mar-Apr 2004
[11] Papadoglou Nick and Stipidis Elias ldquoInvestigation for a Global AVL
Systemrdquo IEEE Intelligent Transportation Systems Vol2 pp121 - 126
NO3 SEPTEMBER
[12] Sinpyo Hong Man Hyung Lee Sun Hong Kwon Ho Hwan Chun ldquoA car
test for the estimation of GPSINS alignment errors rdquo IEEE Intelligent
Transp
[13] Youjing Cui and Shuzhi Sam Ge ldquoAutonomous vehicle positioning with
GPS in urban canyon environmentsrdquo IEEE Robotics and
19 Issue 1 pp15 - 25 Feb 2003
XF He CL Law and KV Ling ldquoGPS Based IPS for ERP Vehiclesrdquo
IEEE AESS Systems Magazine Vol 16 No9pp 10-14 Sept 2001
httpgmsscgento
[16] 禹凡 無線通訊網路槪論---GSMGPRS3GWAPApplication 文魁資訊
股份有限公司 民國 92 年 2 月
55
- 封面書背doc
- 新增Microsoft Word 文件doc
- 致謝doc
- 摘要目錄doc
- 本文doc
- 第一章緒論
- 第二章GPS全球衛星定位系統分析
- 第三章GIS地理資訊系統發展概況
- 第四章GSMGPRS無線行動通訊技術
- 第五章車輛監控系統架構與移動系統的介紹
- 第六章操作說明與實驗結果
- 第七章結論與未來展望
-