유한요소법 개론 및 구조해석응용
TRANSCRIPT

엔지니어를 위한
유한요소법 개론 및 구조해석 응용
중앙대학교 기계공학부
조 성 욱
- 1 -

Contents
1 공학해석의 기본 개념 3
2 연속계의 해석 : 미분 및 변분 수식화 20
3 변위기준의 유한 요소법의 수식화 36
4 일반화 좌표계의 유한 요소 모델 47
5 프로그램의 구현 64
6 등매개 변수 모델의 수식화 및 계산 76
7 구조 요소의 수식화 89
8 수치 적분 및 모델링의 고려사항 106
9 정적 해석에서의 유한 요소 평형 방정식의 해 120
10 동적 해석에서의 유한 요소 평형 방정식의 해 136
11 모우드 중첩 해석; time history 150
12 주파수와 모드 형상의 계산을 위한 풀이 방법 160
- 2 -
1 공학해석의 기본 개념
강의 개요
• 강의 개요 및 목적.
• 공학해석의 기본 개념, 유한 차원 문제와 무한 차원 문제, 문제 형
태:
정상상태, 전파 문제, 고유치 문제.
• 유한 차원 문제의 해석: 스프링 계의 해석 예제.
• 해석을 위한 기본 요구 조건.
• Direct Stiffness 방법의 사용과 이론.
• 변분 (Variational) 방법과 수식화.
- 3 -
고체 및 구조물의 선형해석 개요
• 유한요소법은 구조공학의 여러 문제의 해석을 위하여 매우 광범위하게 사용되고 있다.
• 사용 분야: 토목, 항공, 기계, 해양, 광산, 원자력, 생체 공학 등.
• 지난 30년 간의 발전을 거쳐 비약적인 발전을 이룩하였슴.
– 현재는 선형, 비선형, 정해석, 동해석 등에 응용이 가능.
– 여러가지의상용프로그램이발표되었으며활발히활용되고
있슴.
강의 내용
• 고체 및 구조계의 선형 유한요소 방법론 소개(여기서 “선형”의 의미는 미소변위와 미소변형도가 발생하는 경
우에 탄성 물질의 해석을 의미함)
• 고려 사항
– 유한요소 평형 방정식의 수식화
– 유한요소 행렬의 계산
– 지배 방정식의 풀이 방법
– 컴퓨터 프로그램으로의 구현 방법
• 근래에 소개되는 효율적인 방법에 관한 실제 문제에의 적용에 관한 토의
- 4 -

참고 사항
• 수학적 유도 과정과 아룰러 물리적인 의미를 파악해야 함.
• 컴퓨터 프로그램의 구성 및 이를 이용한 예제를 활용.
• 본 강의는 유한요소 해석 분야의 간단하고 요약된 소개이며 특정주제에 관한 과제는 참고문헌을 참조.
- 5 -

- 6 -

- 7 -
- 8 -
- 9 -
공학 문제의 해석에의 몇가지 기본 개념
공학 시스템의 해석에 필요한 조건
• 시스템의 이상화
• 평형 방정식의 유도
• 방정식의 해
• 결과의 해석
연속계와 이산계의 비교
• 이산계:
유한개의 변수에 의해 기술된다. → 대수 방정식
• 연속계:
무한개의 변수에 의해 기술된다. → 미분 방정식
문제의 종류
연속계와 이산계 모두 다음과 같이 나뉜다.
• 정상 상태 (statics)
• propagation (dynamics)
• 고유치 문제 (Eigenvalue)
- 10 -
복잡한 연속계의 해석에는 수치 계산 과정을 통해 미분 방정식의
해를 구한다.
⇓
연속계를 이산계로 축약
⇓
강력한 도구 ⇒ 디지탈 컴퓨터를 이용한 유한 요소 방법
이산계의 해석을 위한 단계
• 요소로서 시스템의 이상화
• 요소 평형 방정식의 유도
• 요소 조합
• 응답의 풀이
- 11 -

- 12 -

요소 상호 연결 조건 조건 (Element Interconnection)
F(1)1 + F
(2)1 + F
(3)1 + F
(4)1 = R1
F(2)2 + F
(3)2 + F
(5)2 = R2
F(4)3 + F
(5)3 = R3
이 방정식들은 다음의 식으로 나타낼 수 있다.
KU = R
평형 방정식
KU = R
UT =[
u1 u2 u3]
RT =[
R1 R2 R3]
K =
⎡⎢⎢⎢⎣
k1 + k2 + k3 + k4 −k2 −K3 −K4
−k2 − k3 k2 + k3 + k5 −k5
−k4 −k5 k4 + k5
⎤⎥⎥⎥⎦
- 13 -

요소는 다음과 같이 조합되어 진다.
K =5∑
i=1K(i)
여기서
K(1) =
⎡⎢⎢⎢⎣
k1 0 00 0 00 0 0
⎤⎥⎥⎥⎦
K(2) =
⎡⎢⎢⎢⎣
k2 −k2 0−k2 k2 0
0 0 0
⎤⎥⎥⎥⎦
etc . . .
이 조합 방법은 direct stiffness method라고 부른다.
정상상태의 해석은 위의 방정식을 풀면 된다.
- 14 -

- 15 -

- 16 -
이 예제에서 Direct Approach 방법을 사용했다. 다른 방법으로 변분법
을 사용할 수도 있다.
변분법에서 extremum approach 를 사용한다.
Π = U −W
U = 시스템의 변형 에너지
W = 하중에 의한 전체 포텐샬
평형 방정식은 다음 식에 의해 구해진다.
∂Π
∂ui= 0
위의 해석에서 다음을 얻는다.
U = 12U
TKU
W = UTR
변분식에 대입하면 다음을 얻는다.
KU = R
Note : U 와 W 를 구하기 위해서는 모든 요소의 값을 더해야 한다.
- 17 -
Propagation Problem
중요한 특징 : 응답이 시간에 따라 변한다. ⇒ d’Alembert force를 포함
해야 한다.
KU(t) = R(t)−MU(t)
Example:
M =
⎡⎢⎢⎢⎣
m1 0 00 m2 00 0 m3
⎤⎥⎥⎥⎦
고유치 문제
일반화된 고유치 문제(Eigenvalue Problem, EVP) 를 고려하면
Av = λBv
A, B 는 n 차의 대칭 행렬이다.
v 는 n 차의 벡터이다.
λ 는 스칼라이다.
EVP 는 동역학과 좌굴 해석에서 발생한다.
- 18 -

Example: System of rigid carts
MU + KU = 0
U의 해가 삼각함수 형태라고 가정하면,
U = φ sin ω(t− τ)
위 식을 대입하여 다음을 얻는다.
−ω2 M φ sin ω(t− τ) + K φ sin ω(t− τ) = 0
위의 식에서 다음을 얻는다.
K φ = ω2 M φ
이 시스템에는 3 개의 해가 있다.
ω1, φ1ω2, φ2ω3, φ3
⎫⎪⎪⎪⎬⎪⎪⎪⎭ eigenpairs
일반적으로 n 개의 해가 있다.
- 19 -

2 연속계의 해석 : 미분 및 변분 수식화
강의 개요
• 연속계의 해석에 대한 기본 개념
• 미분 및 변분수식화
• Essential and Natural B.C.
• Cm−1 변분 문제의 정의
• 가상 변위의 원리
• 가상 변위의 이론인 포텐셜 보존과 미분형 과의 관계
• Weighted residual methods, Galerkin, Least squares methods.
• Ritz analysis method
• weighted residual 및 Ritz methods의 성질
• 예제: 비균일 바의 해석, 해의 정확성, 유한 요소 해법의 소개
- 20 -
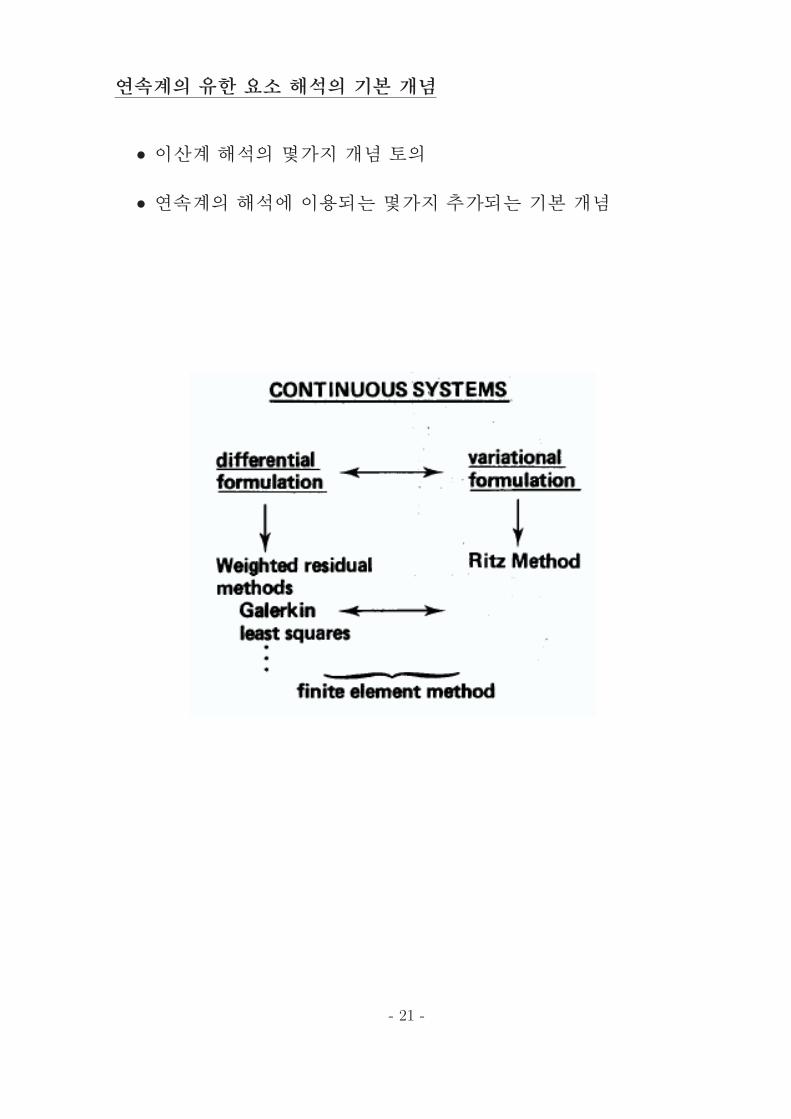
연속계의 유한 요소 해석의 기본 개념
• 이산계 해석의 몇가지 개념 토의
• 연속계의 해석에 이용되는 몇가지 추가되는 기본 개념
- 21 -

예제: Differential Formulation
문제의 지배 미분 방정식
∂2u
∂x2 =1
c2
∂2u
∂t2, c =
√√√√E
ρ
미분 방정식의 유도:
요소 힘의 평형이 요구되는 특이한 미분 요소는 d’Alembert’s 원리를
사용한다.
Area A, mass density ρ
σA|x + A∂σ
∂x
∣∣∣∣∣x
dx− σA|x = ρ A∂2u
∂t2
The constitute relation is
σ = E∂u
∂x
- 22 -

위의 두 방정식을 더하여 다음을 얻는다.
∂2u
∂x2 =1
c2
∂2u
∂t2
경계조건은 다음과 같다.
u(0, t) = 0 ⇒ essential (displ.) B.C.
EA∂u
∂x(L, t) = R0 ⇒ natural (force) B.C.
초기 조건은 다음과 같다.
u(x, 0) = 0
∂u
∂t(x, 0) = 0
일반적으로 경계조건에 관해서는 다음 조건이 성립한다.
• 지배 미분 방정식에서 가장 높은 미분 차수는 2m 이다.
• 변위경계조건 (disp. B.C.)의가장높은미분차수는 (m−1)이다.
• 힘 경계조건 (force B.C.)의 가장 높은 미분 차수는 (2m− 1) 이다.
정의: 이런 문제를 Cm−1 변분 문제라 한다.
- 23 -

예제 : 변분 수식화
일반적으로 다음 식을 정의한다.
Π = U −W
Rod에 대해서는,
Π =∫ L
0
1
2EA
(∂u
∂x
)2
dx−∫ L
0u fB dx− uL R
그리고 경계조건은,
u0 = 0
그리고 변분의 조건식은 다음과 같다.
δΠ = 0
변분의 조건식 δΠ = 0 은 다음과 같이 된다.
∫ L
0
(EA
∂u
∂x
) (δ∂u
∂x
)dx−
∫ L
0δufB dx− δuLR = 0
위식은문제를지배하는가상변위의원리이다.일반적으로이원리를
다음과 같이 쓴다.
∫V
δεT τdV =∫V
δUT fB dV +∫S
δUST
fS dS
혹은
∫V
εT τdV =∫V
UT
fB dV +∫SU
ST
fS dS
- 24 -

이제 미분 평형 방정식과 x = L 에서의 경계조건을 유도할 수 있다.
EA 는 상수 이므로, ∂δu∂x 를 δ ∂u
∂x 라고 쓰고, 부분 적분을 사용하면 다음
식이 유도된다.
−∫ L
0
⎛⎝EA
∂2u
∂x2 + fB
⎞⎠ δu dx +
[EA
∂u
∂x
∣∣∣∣∣x=L
−R
]δuL − EA
∂u
∂x
∣∣∣∣∣x=0
δu0 는 ‘0’ 이지만, δu 는 모든 점에서 임의의 값을 가지므로,
EA∂2u
∂x2 + fB = 0
그리고
EA∂u
∂x
∣∣∣∣∣x=L
= R
또한,
fB = −A ρ∂2u
∂t2
따라서 다음 식을 구할 수 있다.
∂2u
∂x2 =1
c2
∂2u
∂t2; c =
√√√√E
ρ
- 25 -
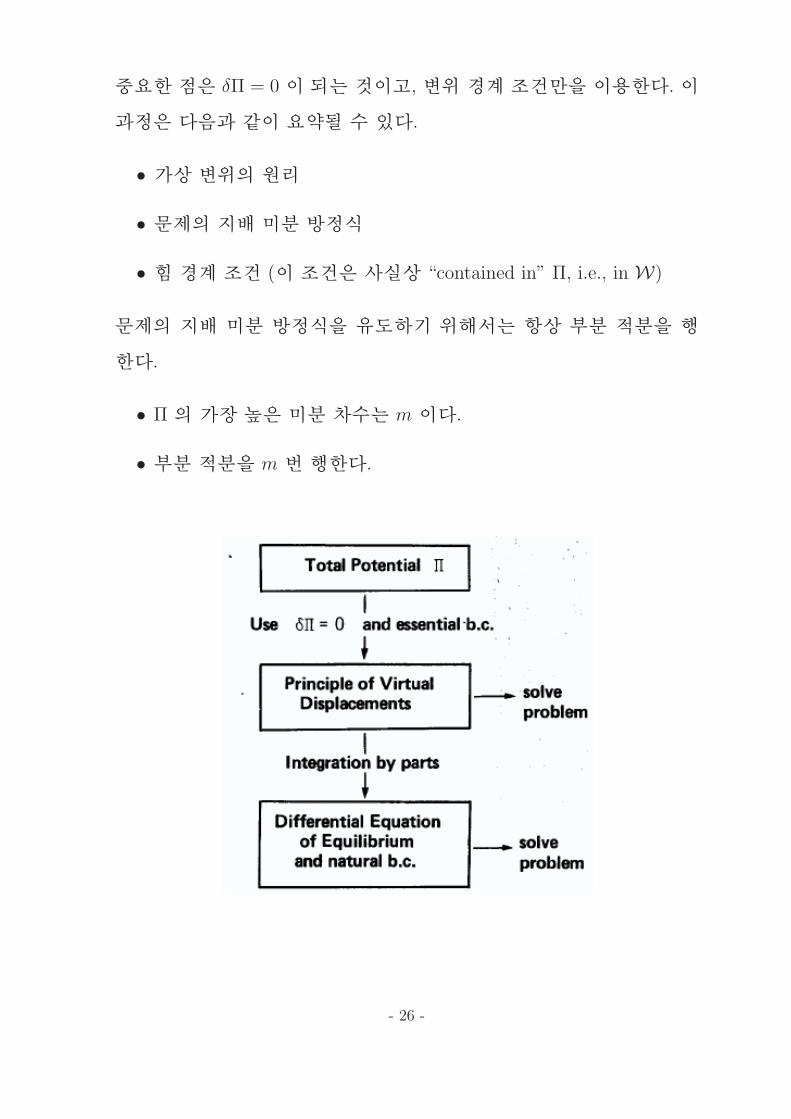
중요한 점은 δΠ = 0 이 되는 것이고, 변위 경계 조건만을 이용한다. 이
과정은 다음과 같이 요약될 수 있다.
• 가상 변위의 원리
• 문제의 지배 미분 방정식
• 힘 경계 조건 (이 조건은 사실상 “contained in” Π, i.e., in W)
문제의 지배 미분 방정식을 유도하기 위해서는 항상 부분 적분을 행
한다.
• Π 의 가장 높은 미분 차수는 m 이다.
• 부분 적분을 m 번 행한다.
- 26 -
Weighted Residual Methods
정상상태 문제를 고려하면
L2m[φ] = r
경계 조건을 적용 하면
Bi[φ] = qi|at boundary i = 1, 2, . . .
Weighted Residual ( and the Ritz analysis ) 의 가장 기본 단계는 해의
형태를 다음의 형태로 가정하는 것이다.
φ =n∑
i=1aifi
fi 는 선형 독립 trial function 이고, ai는 해석에서 결정되는 multiplier
계수 이다.
Weighted Residual method 를 이용할때 fi 를 모든 경계조건을 만족하
도록 선택하는데, 이에 의해 residual을 다음식에 의해 계산한다.
R = r − L2m
⎡⎣ n∑
i=1aifi
⎤⎦
다양한Weighted Residual method 는 R 이작은 값을 가지도록 하기위
해 ai 를 이용하는 기준이 다르다. 모든 방법이 weighted average R 이
제거 되도록 ai 를 결정한다.
- 27 -
Galerkin method
이 방법에서는 ai 는 n 개의 방정식에서 구해진다.
∫D
fiRdD = 0 i = 1, 2, . . . , n
Least squares method
이 방법은 residual 의 제곱의 적분이 ai 에 대해 최소가 된다.
∂
∂ai
∫D
R2dD = 0 i = 1, 2, . . . , n
[이방법은 trial function에의해만족되지않는경우에힘경계조건에
대해 확장 될 수 있다. ]
Ritz Analysis method
Π를주어진미분식과같은 Cm−1 변문문제라하자. Ritz Method에서
는 주어진 trial function φ 를 Π 에 대입하고, Π 의 고정 조건을 이용한
ai 에 대한 n 개의 연립 방정식을 유도한다.
∂Π
∂ai= 0 i = 1, 2, . . . , n
- 28 -

properties
• Ritz해석에쓰이는 trial function은변위경계조건만을만족하면
된다.
• δΠ = 0 의 응용으로 가상 변위의 원리가 유도되므로, 이 가상
변위의 원리를 Ritz analysis 에 효과적으로 이용할 수 있다.
• δΠ = 0 에 의해 내부적인 평형 조건과 힘 경계 조건의 위반량을
최소화 한다.
• 대칭 계수 행렬이 다음의 형태로 유도 된다.
KU = R
- 29 -

Potential은 다음과 같다.
Π =∫ 180
0
1
2EA
(∂u
∂x
)2
dx− 100u|x=180
그리고, 변위 경계 조건은
u|x=0 = 0
변위를 다음과 같이 가정하자
Case 1.
u = a1x + a2x2
Case 2.
u =xuB
1000 ≤ x ≤ 100
u =(1− x−100
80
)uB +
(x−100
80
)uC 100 ≤ x ≤ 180
δΠ = 0 이 되게 하면 다음을 얻는다.
δΠ =∫ 180
0
(EA
∂u
∂x
)δ
(∂u
∂x
)dx− 100δu|x=100 = 0
또는 가상 변위의 원리식이 유도된다.
∫ 180
0
(∂δu
∂x
) (EA
∂u
∂x
)dx = 100δu|x=180
∫V
εT τ dV = U i Fi
- 30 -

이론해
부분 적분을 통해서 다음을 얻는다.
∂
∂x
(EA
∂u
∂x
)= 0
EA∂u
∂x
∣∣∣∣∣x=180
= 100
풀이의 해는
u =100
Ex 0 ≤ x ≤ 100
u =10000
E+
4000
E− 4000
E
(1 +
x− 100
40
) 100 ≤ x ≤ 180
bar 에서의 응력은 다음과 같다.
σ = 100 0 ≤ x ≤ 100
σ =100(
1 +x− 100
40
)2 100 ≤ x ≤ 180
- 31 -

Ritz 해석을 수행하면
Case 1.
Π =E
2
∫ 100
0(a1 + 2a2x)2 dx
+E
2
∫ 180
100
(1 +
x− 100
40
)2(a1 + 2a2x)2 dx− 100u|x=180
δΠ = 0 을 적용하면 다음을 얻는다.
E
⎡⎢⎣ 0.4467 116
116 34076
⎤⎥⎦
⎡⎢⎣ a1
a2
⎤⎥⎦ =
⎡⎢⎣ 18
3240
⎤⎥⎦
그리고
a1 =128.6
E; a2 = −0.341
E
이에 의해 근사해를 얻는다.
u =128.6
Ex− 0.341
Ex2
σ = 128.6− 0.682x
- 32 -

Case 2.
총 포텔셜은 다음과 같다.
Π =E
2
∫ 100
0
(1
100uB
)2dx+
E
2
∫ 180
100
(1 +
x− 100
40
)2 (− 1
80uB +
1
80uC
)2dx
다시 δΠ = 0 을 적용하면 다음식을 얻는다.
E
240
⎡⎢⎣ 15.4 −13
−13 13
⎤⎥⎦
⎡⎢⎣ uB
uC
⎤⎥⎦ =
⎡⎢⎣ 0
100
⎤⎥⎦
따라서 다음 해를 구할 수 있다.
uB =10000
E; uC =
11846.2
E
그리고
σ = 100 0 ≤ x ≤ 100
σ =1846.2
80= 23.08 x ≥ 100
- 33 -

- 34 -

마지막 해석에서 다음사항을 유의해야 한다.
• 힘 경계 조건을 만족하지 않는 trial function 의 사용
• trial function자체는연속함수이나,그미분형은 B점에서불연속
이다. Cm−1변분문제에서함수의 (m−1)번째미분의연속성만이
필요하다. 이 예제에서는 m = 1 이다.
• A-B, B-C영역은유한요소이다.따라서유한요소해석을수행한
것과 동일한 결과이다.
- 35 -

3 변위기준의 유한 요소법의 수식화
강의 개요
• 변위기준의 유한 요소법의 일반적으로 효과적인 수식화
• 가상 변위의 원리
• 여러가지 보간 행렬과 요소 행렬
• 유도된 방정식의 물리적인 설명
• 직접 강성 방법
• 정적 , 동적 조건
• 경계 조건의 적용
• 불균일 bar 의 예제 해석과 요소 행렬의 자세한 설명
- 36 -

변위 기준의 유한 요소법의 수식화
• 아주 일반적인 수식화
• 실제 수행되고 있는 대부분의 유한 요소 해석의 기본이 된다.
• 이 수식은 Ritz/Galerkin 방법의 현대적 응용이다.
• 정적, 동적 조건을 고려하지만 선형 해석만을 다룬다.
- 37 -

외력은 다음과 같다.
fB =
⎡⎢⎢⎢⎢⎢⎣
fBX
fBY
fBZ
⎤⎥⎥⎥⎥⎥⎦ ; fS =
⎡⎢⎢⎢⎢⎢⎣
fSX
fSY
fSZ
⎤⎥⎥⎥⎥⎥⎦ ; Fi =
⎡⎢⎢⎢⎢⎢⎣
F iX
F iY
F iZ
⎤⎥⎥⎥⎥⎥⎦
하중이 없는 상태로부터의 강체의 변위는 U 로 표현된다.
UT =[
U V W]
U 에 상응되는 변형률은 다음과 같다.
εT =[
εXX εY Y εZZ γXY γY Z γZX
]
ε 에 부합되는 응력은 다음과 같다.
τT =[
τXX τY Y τZZ τXY τY Z τZX
]
가상 변위의 원리
∫V
εT τ dV =∫V
UT
fB dV +∫SU
ST
fS dS +∑i
UiT
Fi
여기서
UT
=[
U V W]
εT =[
εXX εY Y εZZ γXY γY Z γZX
]
- 38 -

- 39 -

요소 (m) 에 대해서 다음 식을 사용한다.
u(m)(x, y, z) = H(m)(x, y, z)U
UT =[
U1V1W1 U2V2W2 · · · UNVNWN
];
UT =[
U1U2U3 · · · Un
]
ε(m)(x, y, z) = B(m)(x, y, z)U
τ (m) = C(m)ε(m) + τ I(m)
앞의 식을 전체 요소의 합에 대한 식으로 다시 쓰면
∑m
∫V (m)
ε(m)T
τ (m) dV (m) =∑m
∫V (m)
U(m)T
fB(m)
dV (m) +
∑m
∫S(m)
US(m)T
fS(m)
dS(m) +∑i
UiT
Fi
위 식을 요소 변위, 변형율, 응력의 항으로 나타내면
ε(m)T︷ ︸︸ ︷U
T{∑
m
∫V (m)
B(m)T
C(m) B(m) dV (m)}U︸ ︷︷ ︸
τ (m)=C(m)ε(m), ε(m)=B(m)U
= UT[{∑
m
∫V (m)
H(m)T
︸ ︷︷ ︸U
(m)T, U
(m)=H(m)U
fB(m)
dV (m)}
+
{∑m
∫V (m)
HS(m)T
fS(m)
︸ ︷︷ ︸U
S(m)T
dS(m)}
−{∑
m
∫V (m)
B(m)T
︸ ︷︷ ︸ε(m)T
τ I(m)
dV (m)}+F
]
- 40 -
최종적으로 다음의 행렬 방정식이 유도된다.
KU = R
여기서
R = RB + RS −RI + RC
K =∑(m)
∫V (m)
B(m)T
C(m) B(m) dV (m)
RB =∑m
∫V (m)
H(m)T
fB(m)
dV (m)
RS =∑m
∫V (m)
HS(m)T
fS(m)
dS(m)
RI =∑m
∫V (m)
B(m)T
τ I(m)
dV (m)
RC = F
동적 해석에서의 식은 다음과 같다.
RB =∑m
∫V (m)
H(m)T[fB(m) − ρ(m)H(m)U
]dV (m)
MU + KU = R
M =∑m
∫V (m)
ρ(m)H(m)T
H(m)dV (m)
fB(m) = fB(m) − ρu(m)
u(m) = H(m)U
- 41 -
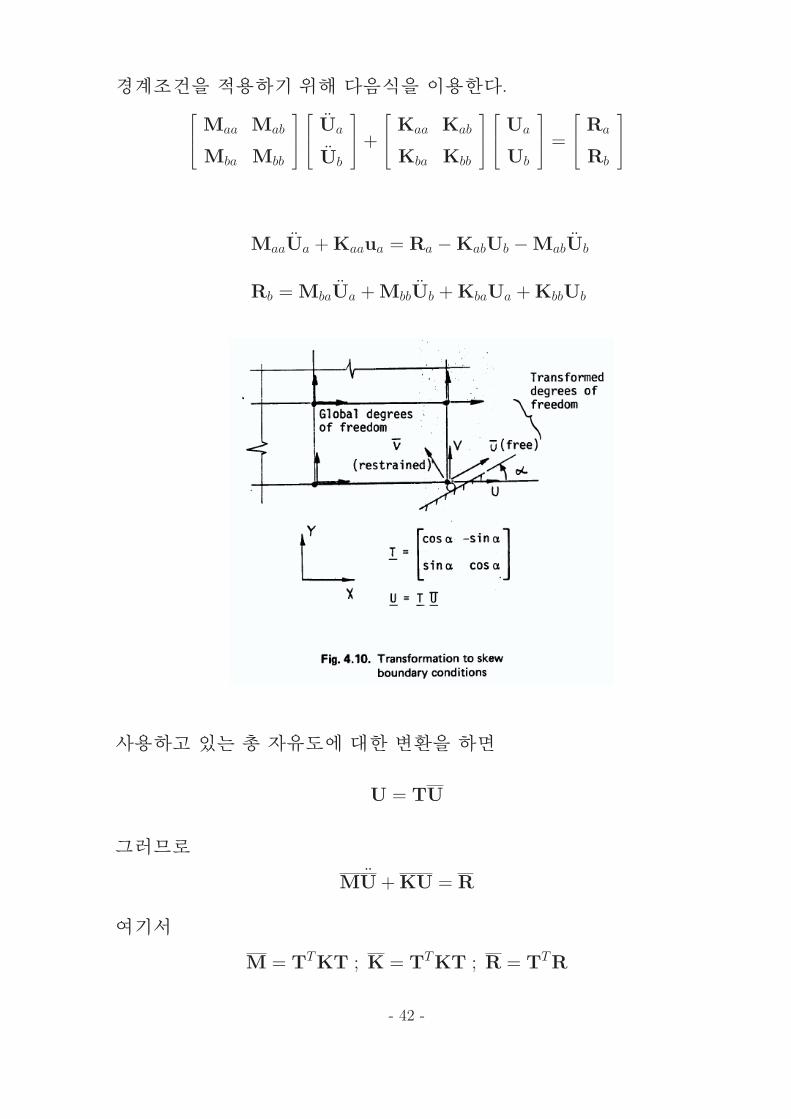
경계조건을 적용하기 위해 다음식을 이용한다.⎡⎢⎣ Maa Mab
Mba Mbb
⎤⎥⎦
⎡⎢⎣ Ua
Ub
⎤⎥⎦ +
⎡⎢⎣ Kaa Kab
Kba Kbb
⎤⎥⎦
⎡⎢⎣ Ua
Ub
⎤⎥⎦ =
⎡⎢⎣ Ra
Rb
⎤⎥⎦
MaaUa + Kaaua = Ra −KabUb −MabUb
Rb = MbaUa + MbbUb + KbaUa + KbbUb
사용하고 있는 총 자유도에 대한 변환을 하면
U = TU
그러므로
MU + KU = R
여기서
M = TTKT ; K = TTKT ; R = TTR
- 42 -

T =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
1. . .
1cos α − sin α
1. . .
1sin α cos α
1. . .
1
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
- 43 -
- 44 -

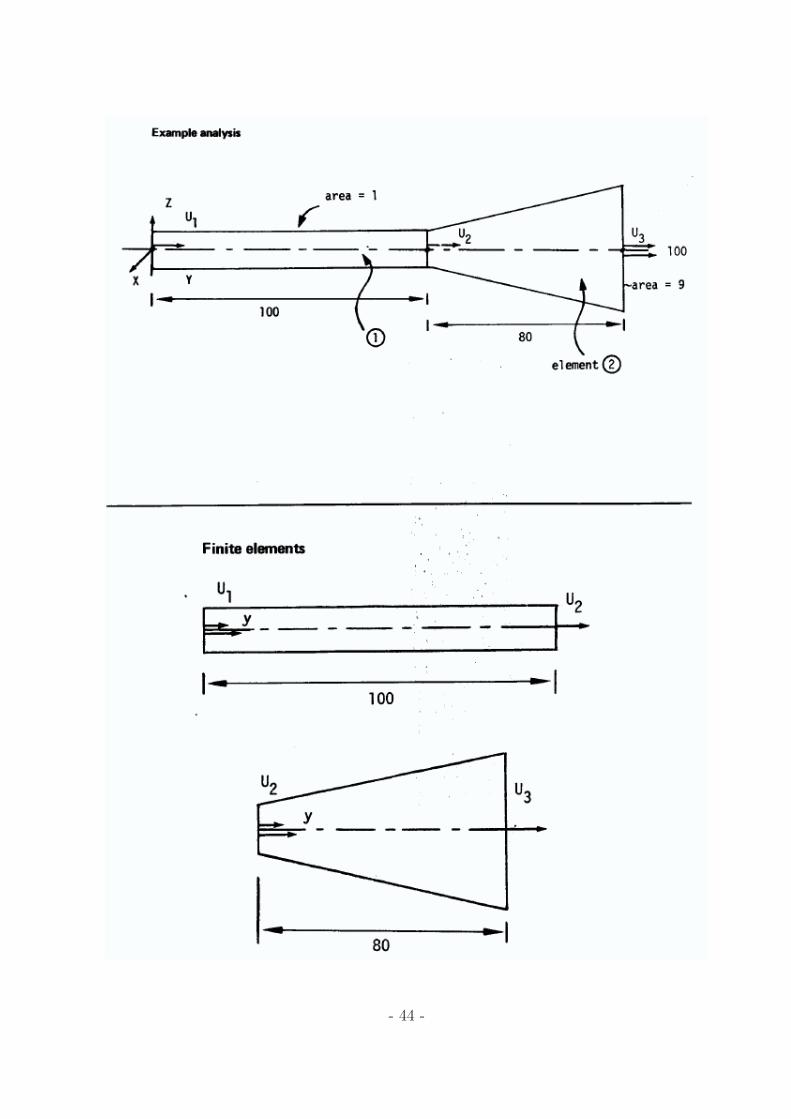
변위와 변형율 보간 행렬
H(1) =[
(1− y
100)
y
1000
]
H(2) =[
0 (1− y
80)
y
80
]∣∣∣∣∣∣∣∣∣
∣∣∣∣∣∣∣∣∣v(m) = H(m)U
B(1) =
[− 1
100
1
1000
]
B(2) =
[0 − 1
80
1
80
]∣∣∣∣∣∣∣∣∣∣∣
∣∣∣∣∣∣∣∣∣∣∣∂v∂y = B(m)U
- 45 -

강성 행렬은 다음과 같다.
K = (1)(E)∫ 100
0
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎣
− 1
1001
100
0
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎦
[− 1
100
1
1000
]dy
+E∫ 80
0
(1 +
y
40
)2
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎣
0
− 1
801
80
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎦
[0 − 1
80
1
80
]dy
따라서
K =E
100
⎡⎢⎢⎢⎢⎢⎣
1 −1 0
−1 1 0
0 0 0
⎤⎥⎥⎥⎥⎥⎦ +
13E
240
⎡⎢⎢⎢⎢⎢⎣
0 0 0
0 1 −1
0 −1 1
⎤⎥⎥⎥⎥⎥⎦
=E
240
⎡⎢⎢⎢⎢⎢⎣
2.4 −2.4 0
−2.4 15.4 −13
0 −13 13
⎤⎥⎥⎥⎥⎥⎦
M,RB 에 대해서도 유사한 방법으로 행렬을 유도할 수 있다.
경계조건은 행렬을 유도한 후 적용한다.
- 46 -

4 일반화 좌표계의 유한 요소 모델
강의 개요
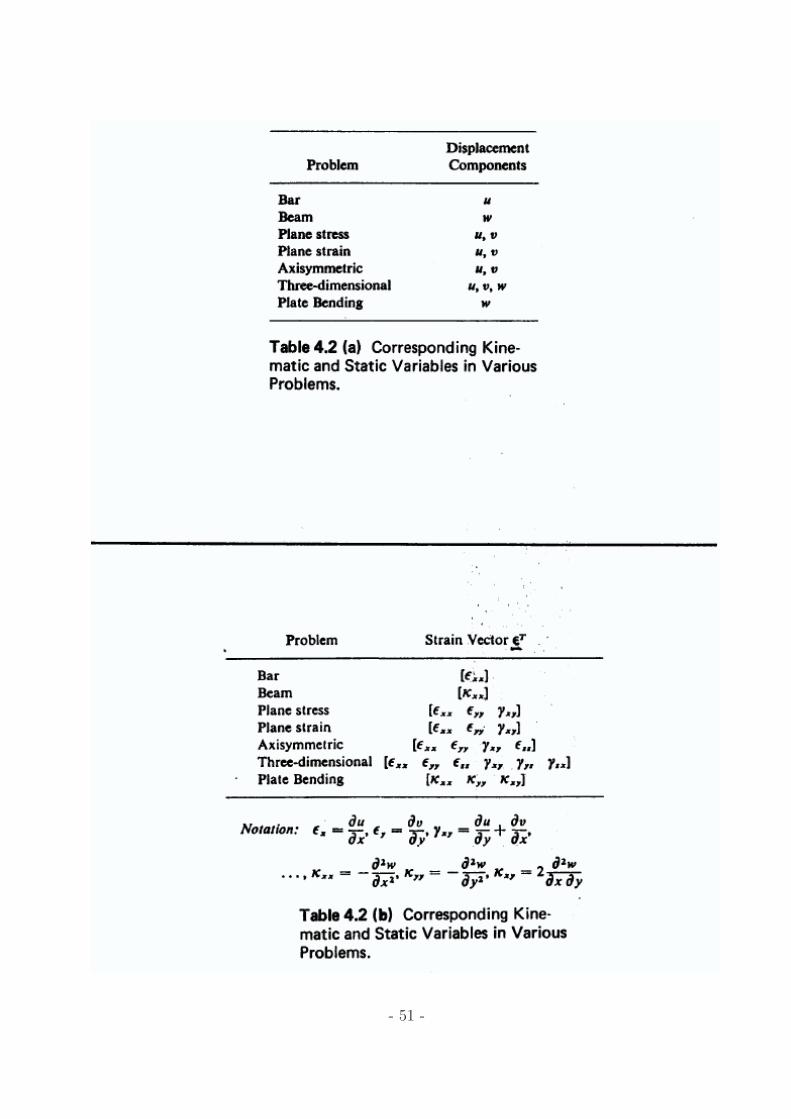
• 문제의 구분 : 트러스, 평면 응력, 평면 변형률, 축대칭, 보, 평판,
쉘 각각의 요소에 부합되는 변위, 변형률, 응력.
• 일반화 좌표계 모델의 유도
• 1-, 2-, 3-차원 요소, 평판과 쉘 요소
• 켄틸레버 평판 예제, 요소 행렬의 자세한 유도
• 집중 하중 , 분포 하중
• 예제의 결과
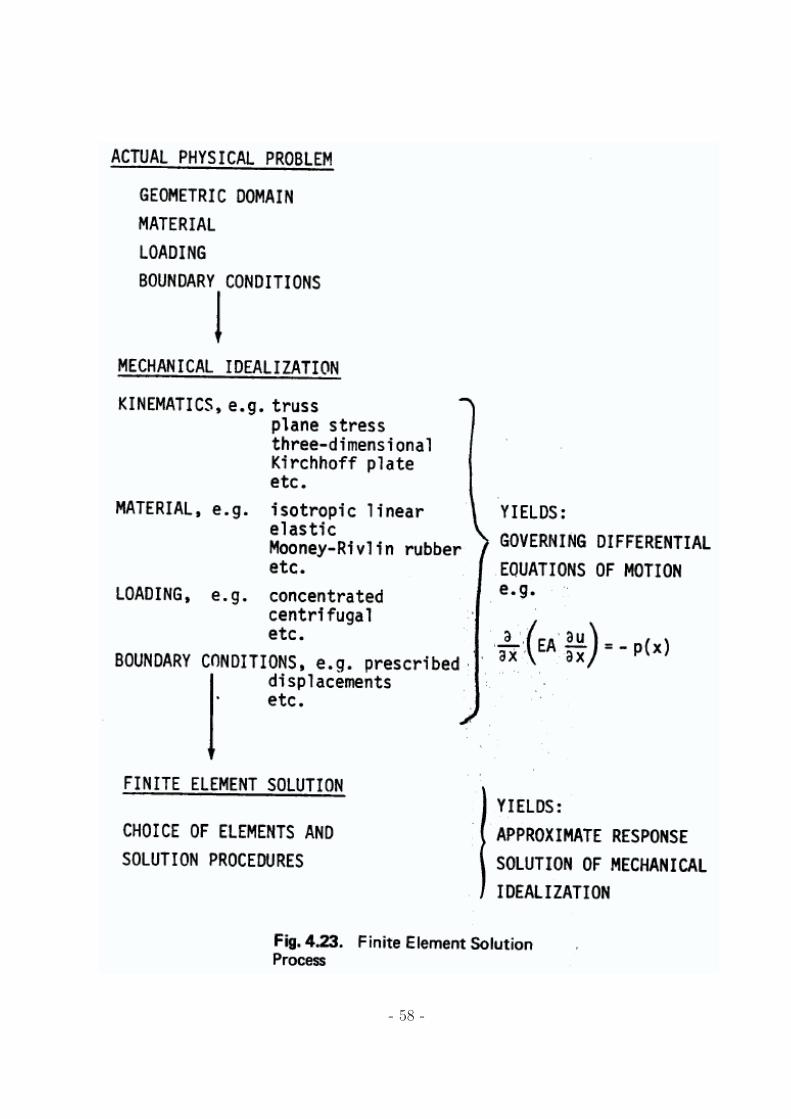
• 유한 요소 풀이 과정의 요약
• 해의 오차
• 수렴 조건, 물리적인 설명, 패치 실험
- 47 -
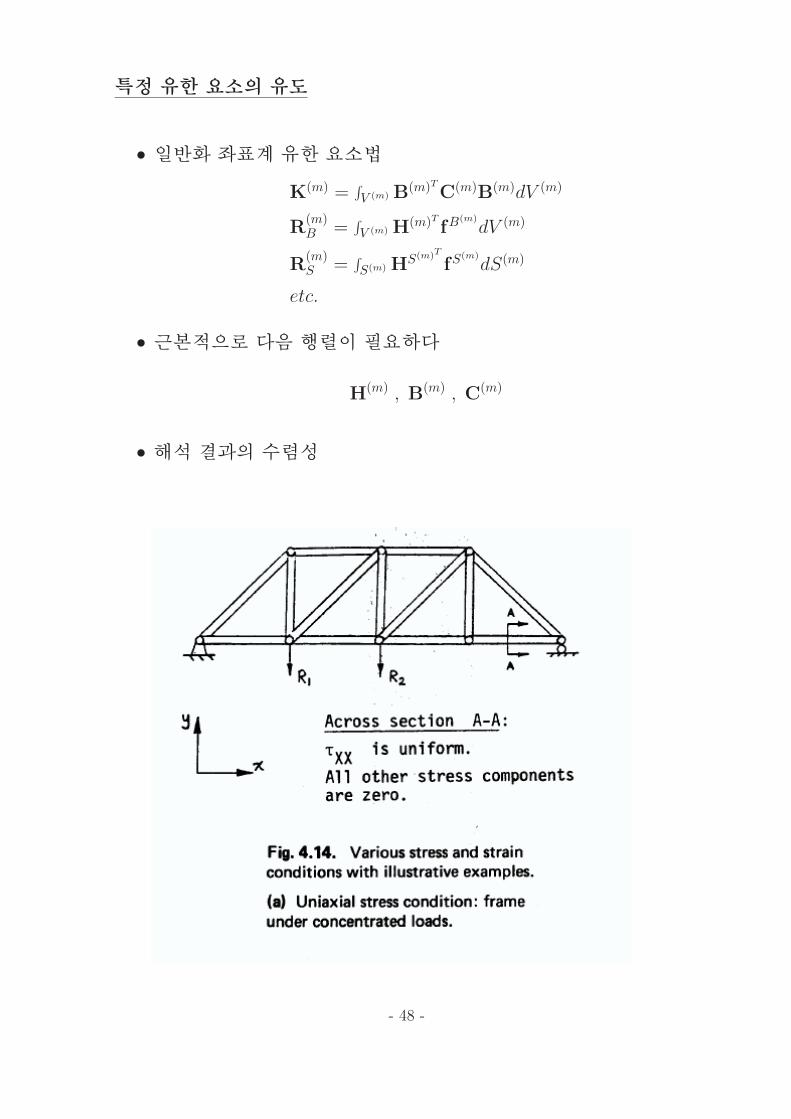
특정 유한 요소의 유도
• 일반화 좌표계 유한 요소법K(m) =
∫V (m) B(m)T
C(m)B(m)dV (m)
R(m)B =
∫V (m) H(m)T
fB(m)
dV (m)
R(m)S =
∫S(m) HS(m)T
fS(m)
dS(m)
etc.
• 근본적으로 다음 행렬이 필요하다
H(m) , B(m) , C(m)
• 해석 결과의 수렴성
- 48 -

- 49 -

- 50 -
- 51 -

- 52 -

요소 변위 전개
u(x) = α1 + α2x + α3x2 + · · ·
2 차원 요소의 경우는;
u(x, y) = α1 + α2x + α3y + α4xy + α5x2 + · · ·
v(x, y) = β1 + β2x + β3y + β4xy + β5x2 + · · ·
평판 굽힘 요소의 경우는;
w(x, y) = γ1 + γ2x + γ3y + γ4xy + γ5x2 + · · ·
3 차원 고체 요소의 경우는;
u(x, y, z) = α1 + α2x + α3y + α4z + α5xy + · · ·v(x, y, z) = β1 + β2x + β3y + β4z + β5xy + · · ·w(x, y, z) = γ1 + γ2x + γ3y + γ4z + γ5xy + · · ·
일반적으로;
u = Φ α
u = A α ; α = A−1 u
ε = Eα ; τ = Cε
H = ΦA−1 ; B = EA−1
- 53 -

예제:
- 54 -

2 번 요소 에 대해 ⎡⎢⎣ u(x, y)
v(x, y)
⎤⎥⎦
2
= H(2)U
여기서
UT =[
U1 U2 U3 U4 · · · U17 U18]
H(2) 를 구성하기 위해 다음 식을 이용한다.
u(x, y) = α1 + α2x + α3y + α4xy
v(x, y) = β1 + β2x + β3y + β4xy
혹은 ⎡⎢⎣ u(x, y)
v(x, y)
⎤⎥⎦ = Φ α
여기서
Φ =
⎡⎢⎣ φ 0
0 φ
⎤⎥⎦ ; φ =
[1 x y xy
]
그리고
αT =[
α1 α2 α3 α4 β1 β2 β3 β4]
다음 행렬을 정의하면;
uT =[
u1 u2 u3 u4 v1 v2 v3 v4]
변위를 다음과 같이 기술할 수 있다.
u = Aα
따라서
H = ΦA−1
- 55 -

- 56 -
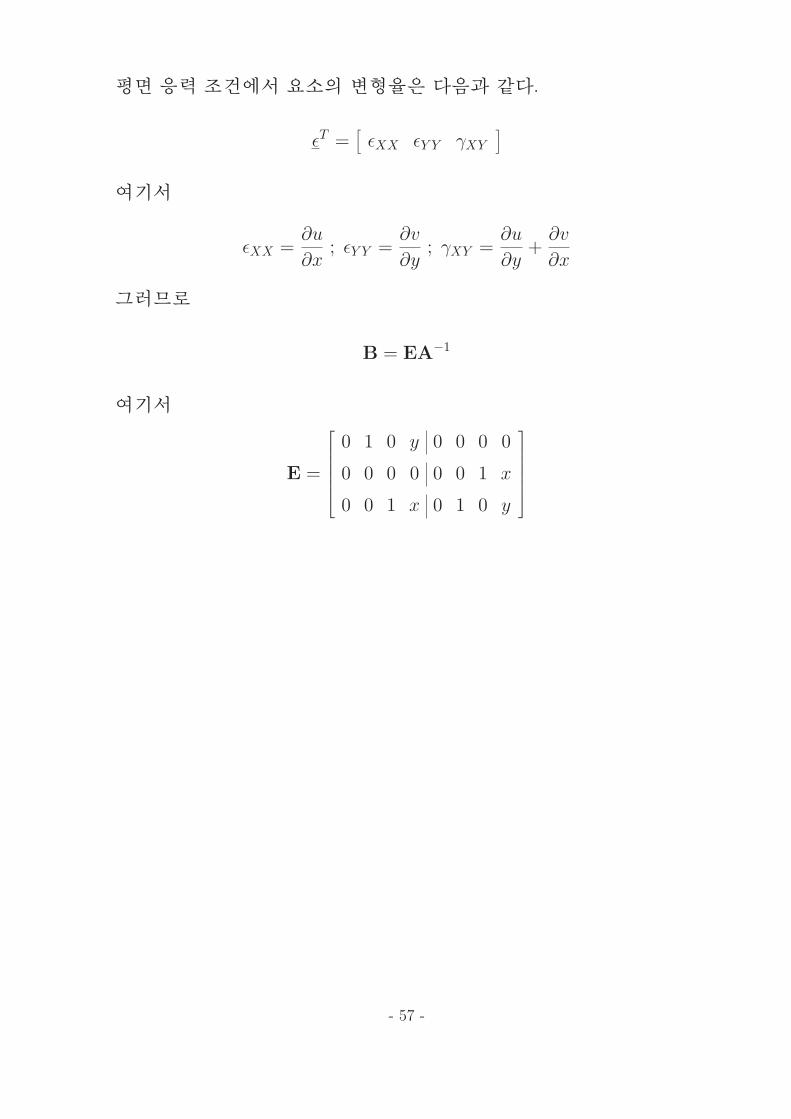
평면 응력 조건에서 요소의 변형율은 다음과 같다.
εT =[
εXX εY Y γXY
]
여기서
εXX =∂u
∂x; εY Y =
∂v
∂y; γXY =
∂u
∂y+
∂v
∂x
그러므로
B = EA−1
여기서
E =
⎡⎢⎢⎢⎢⎢⎣
0 1 0 y 0 0 0 0
0 0 0 0 0 0 1 x
0 0 1 x 0 1 0 y
⎤⎥⎥⎥⎥⎥⎦
- 57 -
- 58 -

- 59 -

수렴성
요소의경계에서기하학적연속인요소를사용한다면,지배미분방정
식의풀이에서단조변화수렴값을얻을수있는데,이때요소는다음을
포함해야 한다.
• 강체 운동
• 일정 변형률 상태
경계에서 연속이 아닌 요소를 사용하면, 위의 조건에 추가해서 요소
의임의의 patch가일정한변형률을나타낼수있어야한다.이조건이
만족되면수렴이보장되는데이때는비단조변화수렴성을갖게된다.
- 60 -

- 61 -

- 62 -

- 63 -
5 프로그램의 구현
강의 개요
• 유한 요소법의 적용
• 상용 프로그램
• 절점 자유도의 위치, 행렬의 계산, 조합에의 자세한 설명
• 외팔 평판 해석의 예
• Out-of-core solution
• 효과적인 절점의 번호
• 총 풀이 과정의 flow chart
• 1, 2, 3차원 보, 평판, 쉘 의 해석에 이용되는 서로 다른 효과적인
유한 요소
- 64 -
유한 요소법의 구현
평형 방정식의 작성
KU = R ; R = RB + · · ·
여기서
K =∑m
K(m) ; RB =∑m
R(m)B
K(m) =∫V (m)
B(m)T
C(m)B(m)dV (m)
R(m)B =
∫V (m)
H(m)T
fB(m)
dV (m)
H(m)︸ ︷︷ ︸k×N
B(m)︸ ︷︷ ︸l×N
N = no. of d.o.f.of total structure
실제는, 간단하게 축약된 요소 행렬을 계산한다.
K︸︷︷︸n×n
, RB︸︷︷︸n×1
, · · · n = no. ofelement d.o.f
H︸︷︷︸k×n
B︸︷︷︸l×n
응력 해석 과정은 다음의 세가지 필수 요소에 의해 알 수 있다.
1. 필요한 구조 행렬인 K,M,C and R 을 계산한다.
2. 평형 방정식의 풀이
3. 요소 응력의 계산
- 65 -

구조 행렬의 계산은 아래의 과정을 통해 수행된다.
• 절점과 요소의 정보를 읽거나 발생시킨다.
• 요소강성행렬,질량행렬,감쇠행렬,등가절점하중을계산한다.
• 구조 행렬 K,M,C,R 의 조합
- 66 -
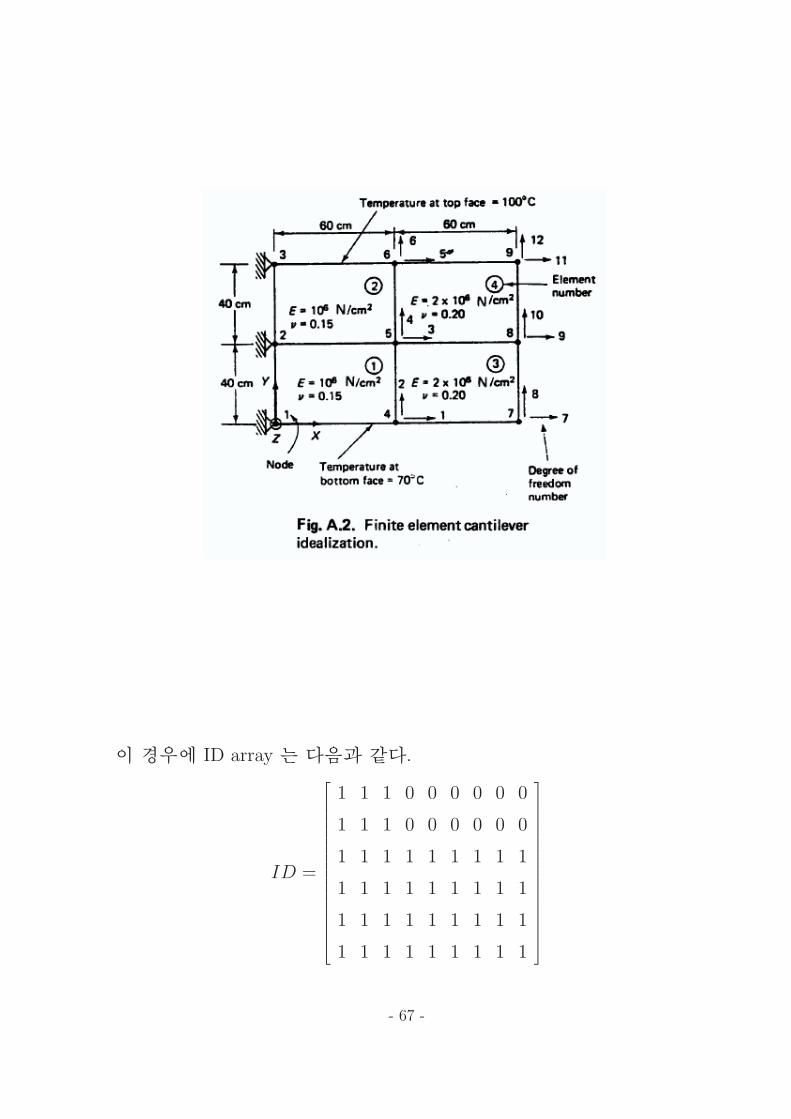
이 경우에 ID array 는 다음과 같다.
ID =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
1 1 1 0 0 0 0 0 0
1 1 1 0 0 0 0 0 0
1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
- 67 -
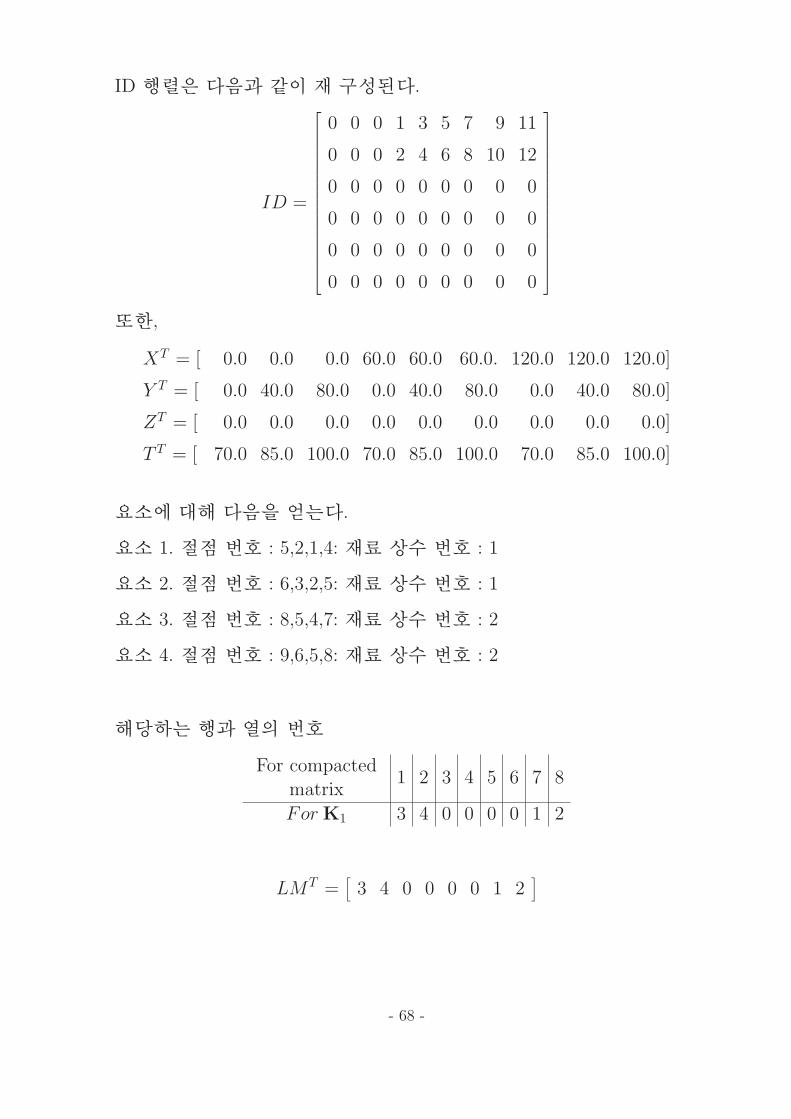
ID 행렬은 다음과 같이 재 구성된다.
ID =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
0 0 0 1 3 5 7 9 11
0 0 0 2 4 6 8 10 12
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
또한,
XT = [ 0.0 0.0 0.0 60.0 60.0 60.0. 120.0 120.0 120.0]
Y T = [ 0.0 40.0 80.0 0.0 40.0 80.0 0.0 40.0 80.0]
ZT = [ 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0]
T T = [ 70.0 85.0 100.0 70.0 85.0 100.0 70.0 85.0 100.0]
요소에 대해 다음을 얻는다.
요소 1. 절점 번호 : 5,2,1,4: 재료 상수 번호 : 1
요소 2. 절점 번호 : 6,3,2,5: 재료 상수 번호 : 1
요소 3. 절점 번호 : 8,5,4,7: 재료 상수 번호 : 2
요소 4. 절점 번호 : 9,6,5,8: 재료 상수 번호 : 2
해당하는 행과 열의 번호
For compactedmatrix
1 2 3 4 5 6 7 8
For K1 3 4 0 0 0 0 1 2
LMT =[
3 4 0 0 0 0 1 2]
- 68 -
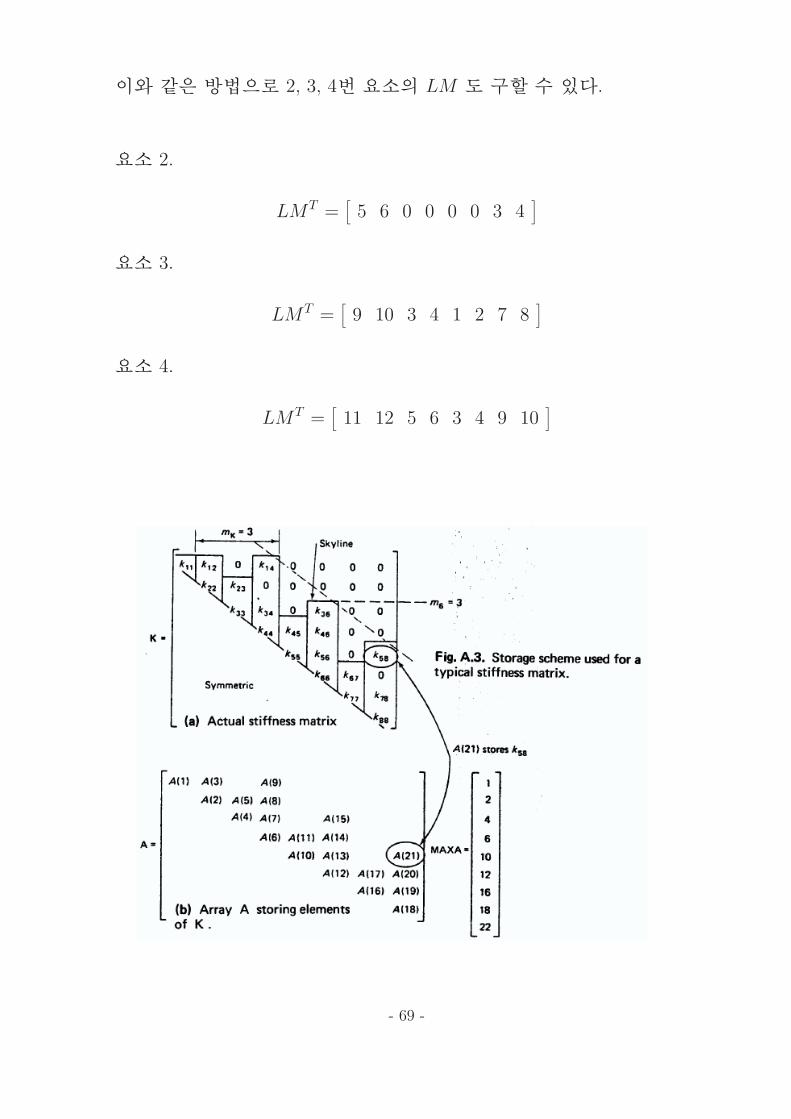
이와 같은 방법으로 2, 3, 4번 요소의 LM 도 구할 수 있다.
요소 2.
LMT =[
5 6 0 0 0 0 3 4]
요소 3.
LMT =[
9 10 3 4 1 2 7 8]
요소 4.
LMT =[
11 12 5 6 3 4 9 10]
- 69 -

- 70 -

- 71 -

- 72 -

- 73 -
- 74 -

- 75 -

6 등매개 변수 모델의 수식화 및 계산
강의 개요
• 등매개 변수 (isoparametric) 연속체 요소의 수식화 및 계산
• 트러스, 평면 응력, 평면 변형률, 축대칭, 3차원 요소
• 가변 절점 요소(variable-number-node), 곡선 요소
• 보간 행렬, 변위 행렬, 응력 보간 행렬의 유도(Jacobian transfor-
mation)
• 예제;파괴역학해석에서의응력특이점을얻기위한내부절점의
이동
등매개 변수 유한 요소의 수식화 및 계산
• 4장에서 논의한 일반화 좌표의 유한 요소 모델
• 필요한 보간 행렬, 요소 행렬을 유도하기 위한 좀 더 일반적인 방
법의 필요
⇓등매개 변수 요소 (isoparametric elements)
- 76 -

등매개 변수 요소의 기본 개념 : (연속체 요소)
형상 보간 (geometry interpolation)
x =N∑
i=1hixi; y =
N∑i=1
hiyi; z =N∑
i=1hizi
변위 보간 (displacement interpolation)
u =N∑
i=1hiui; v =
N∑i=1
hivi; w =N∑
i=1hiwi
여기서 N = 절점의 갯수
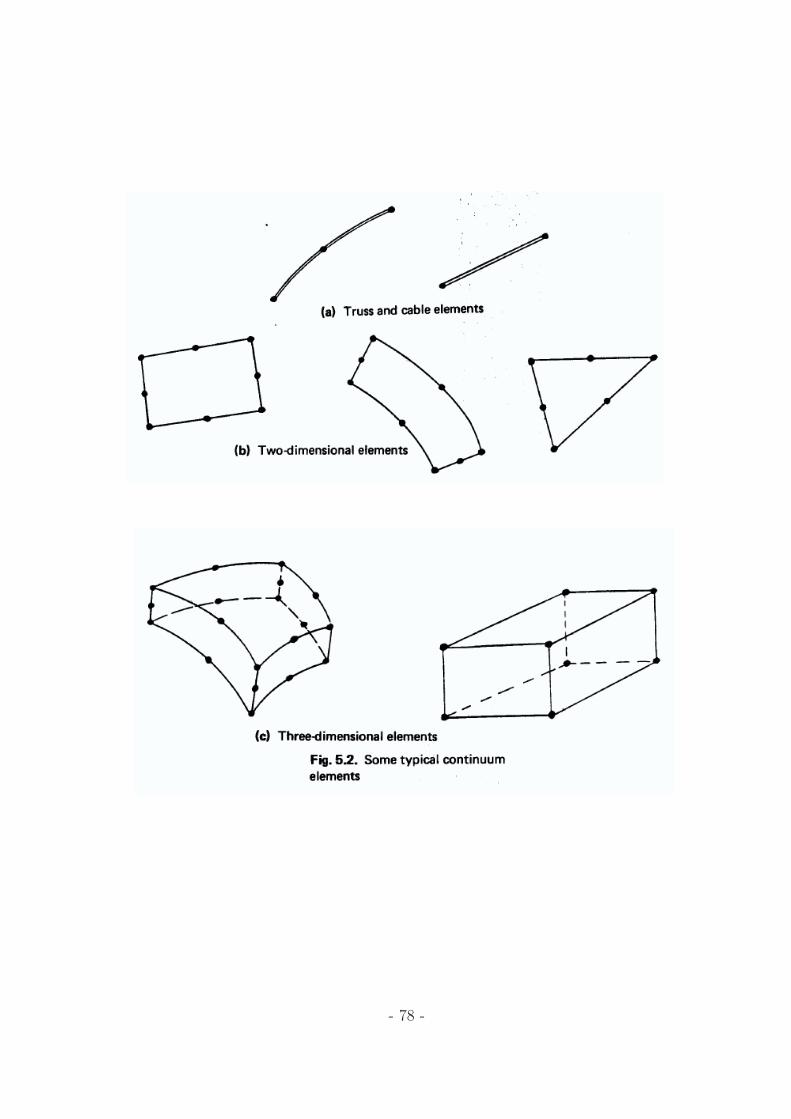
요소의 종류
• 1차원 요소 (1-D)
– 트러스
• 2차원 요소 (2-D)
– 평면 응력 (plane stress)
– 평면 변형률 (plane strain)
– 축 대칭 해석 (axisymmetric analysis)
• 3차원 요소 (3-D)
– 3차원 고체요소
– 두꺼운 쉘
- 77 -
- 78 -

등매개 변수의 기하학적 형상; 예제
- 79 -

보간함수의 형상
- 80 -

- 81 -

- 82 -

보간행렬의 구성
hi 를 구하면 H(형상 보간행렬) 와 B(변형율 보간행렬)을 구성할 수
있다.
• H의 성분은 hi 또는 0 이다.
• B의 성분은 hi 의 미분치 또는 0 이다.
• 2× 2× 2 요소 (정육면체 요소)에 대해 다음을 사용할 수 있다.
x ≡ r y ≡ s z ≡ t
- 83 -
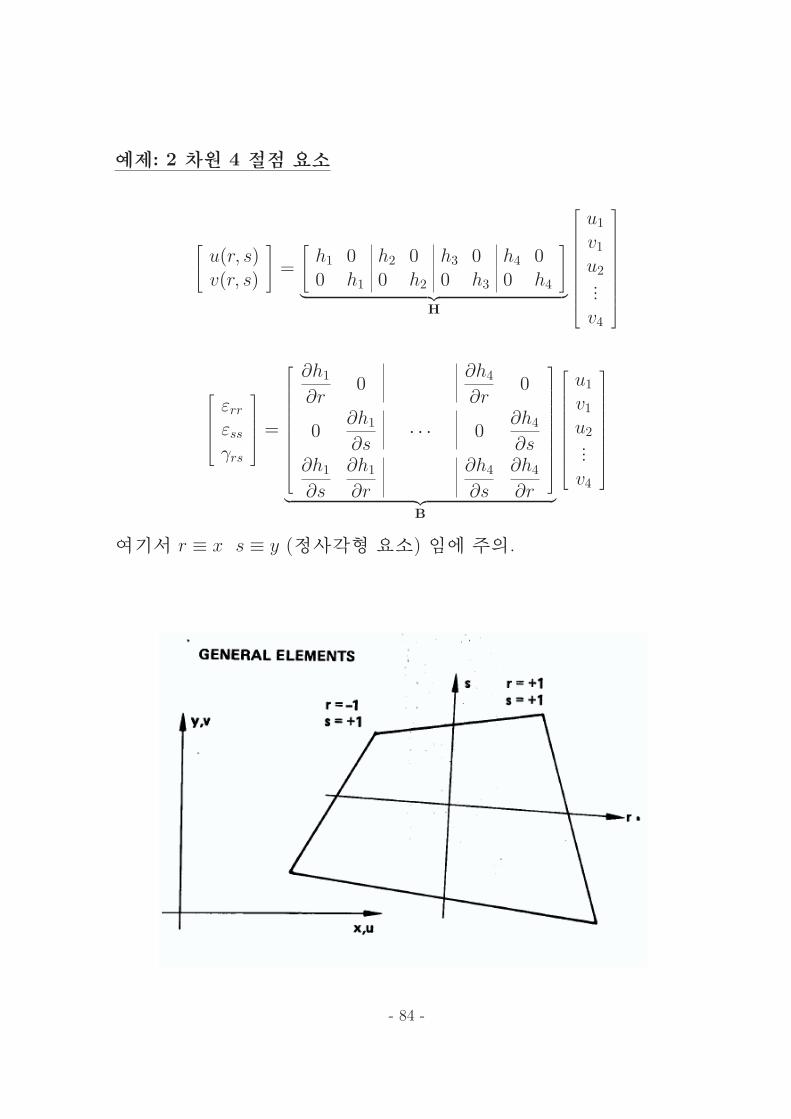
예제: 2 차원 4 절점 요소
⎡⎣ u(r, s)
v(r, s)
⎤⎦ =
⎡⎣ h1 0 h2 0 h3 0 h4 0
0 h1 0 h2 0 h3 0 h4
⎤⎦
︸ ︷︷ ︸H
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
u1
v1
u2...v4
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
⎡⎢⎢⎢⎣
εrr
εss
γrs
⎤⎥⎥⎥⎦ =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
∂h1
∂r0
∂h4
∂r0
0∂h1
∂s· · · 0
∂h4
∂s∂h1
∂s
∂h1
∂r
∂h4
∂s
∂h4
∂r
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
︸ ︷︷ ︸B
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
u1
v1
u2...v4
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
여기서 r ≡ x s ≡ y (정사각형 요소) 임에 주의.
- 84 -

변위, 형상을 앞에서와 같이 보간하는데 정사각형의 형상이 아니므로
미분에 관한 chain rule을 사용한다.⎡⎢⎢⎢⎢⎢⎣
∂
∂r∂
∂s
⎤⎥⎥⎥⎥⎥⎦ =
⎡⎢⎢⎢⎢⎢⎣
∂x
∂r
∂y
∂r∂x
∂s
∂y
∂s
⎤⎥⎥⎥⎥⎥⎦
⎡⎢⎢⎢⎢⎢⎣
∂
∂x∂
∂y
⎤⎥⎥⎥⎥⎥⎦
행렬의 형태로 표시하면
∂
∂r= J
∂
∂x
∂
∂x= J−1 ∂
∂r
주의: 여기서 chain rule을 다음과 같이 거꾸로 사용하면 원하는 미분
값을 구할 수 없다.∂
∂x=
∂
∂r
∂r
∂x+ · · ·
• 위 식을 이용하여 일반적인 요소의 B행렬을 구할 수 있다.
• H와 B행렬은 r, s, t 의 함수이므로, 적분하기 위해서는 다음을
이용해야 한다.
dV = detJ dr ds dt
- 85 -

- 86 -
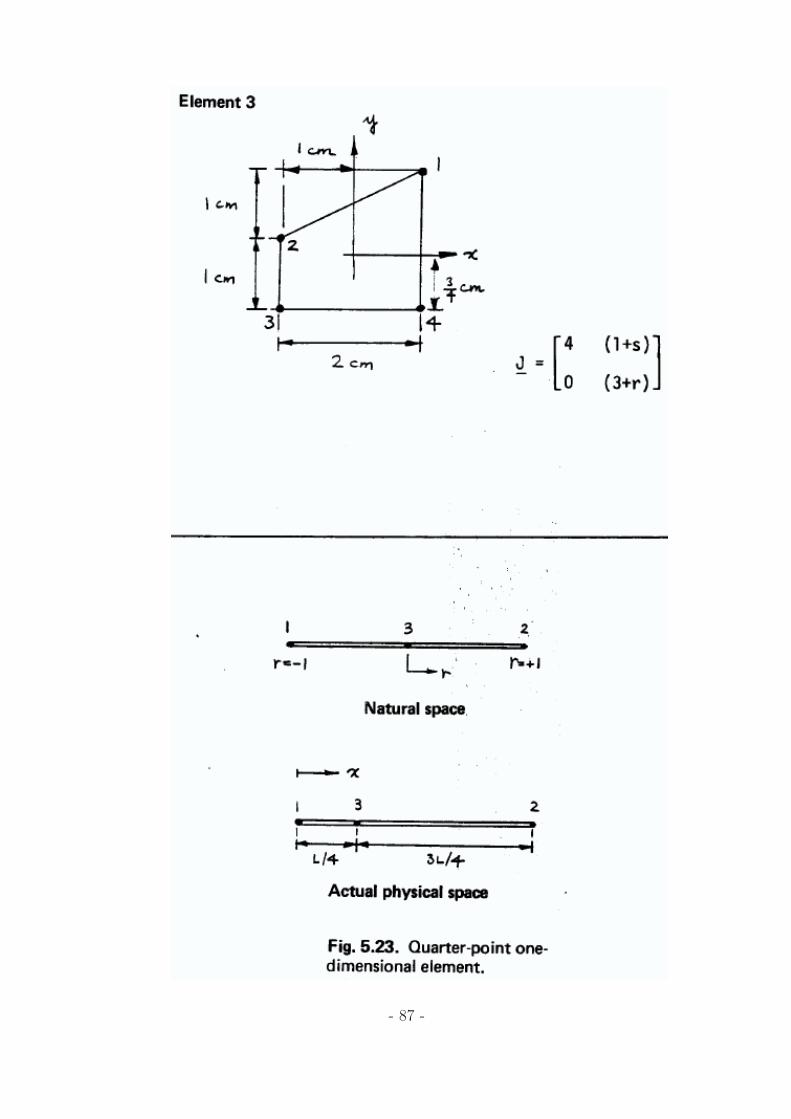
- 87 -

여기서 형상에 관한 보간은 다음과 같다.
x =3∑
i=1hixi =⇒ x =
L
4(1 + r)2
따라서
J =
[L
2+
r
2L
]
그리고
B =1
L
2+
r
2L
[h1,r h2,r h3,r
]
혹은
B =1
L
2+
r
2L
[ (−1
2+ r
) (1
2+ r
)−2r
]
참고사항:
r = 2
√x
L− 1
B =
⎡⎣ (
2
L− 3
2√
L
1√x
) (2
L− 1
2√
L
1√x
) ⎛⎝ 2√
L√
x− 4
L
⎞⎠
⎤⎦
특기 사항:1√x
singularity at X = 0 !
- 88 -

7 구조 요소의 수식화
강의 개요
• 등매개 변수 구조 요소의 수식화 및 계산
• 보, 평판, 쉘 요소
• Mindlin 평판 이론에 의한 수식화와 균일한 일반 연속체 수식화
• 전단 변형을 포함하는 가정
• 예제 : 2차원 보, 평판 요소
• 일반적 다절점 요소에 대한 설명
• 구조 요소와 연속체 요소 사이의 천이 요소
• 저차 요소와 고차 요소의 비교
구조 요소의 수식화
• 보, 평판, 쉘 요소
• isoparametric 함수를 사용한 보간 및 행렬의 구성
• 재료 강도학적인 수식화
– 직선 보 요소: 전단 효과를 포함하는 보 이론의 적용
– 평판 요소: 전단 효과를 포함하는 평판 이론의 적용 (Reiss-
ner/Mindlin)
- 89 -
연속체 역학에 근거한 수식화
• 가상일의 법칙에 대한 일반적 원리를 이용
• 적용이 불필요한 응력 성분은 수식화에서 무시
• 초기에 중립면에 수직한 단면에 있는 입자들에 대하여 기하학적제약 조건을 사용
- 90 -
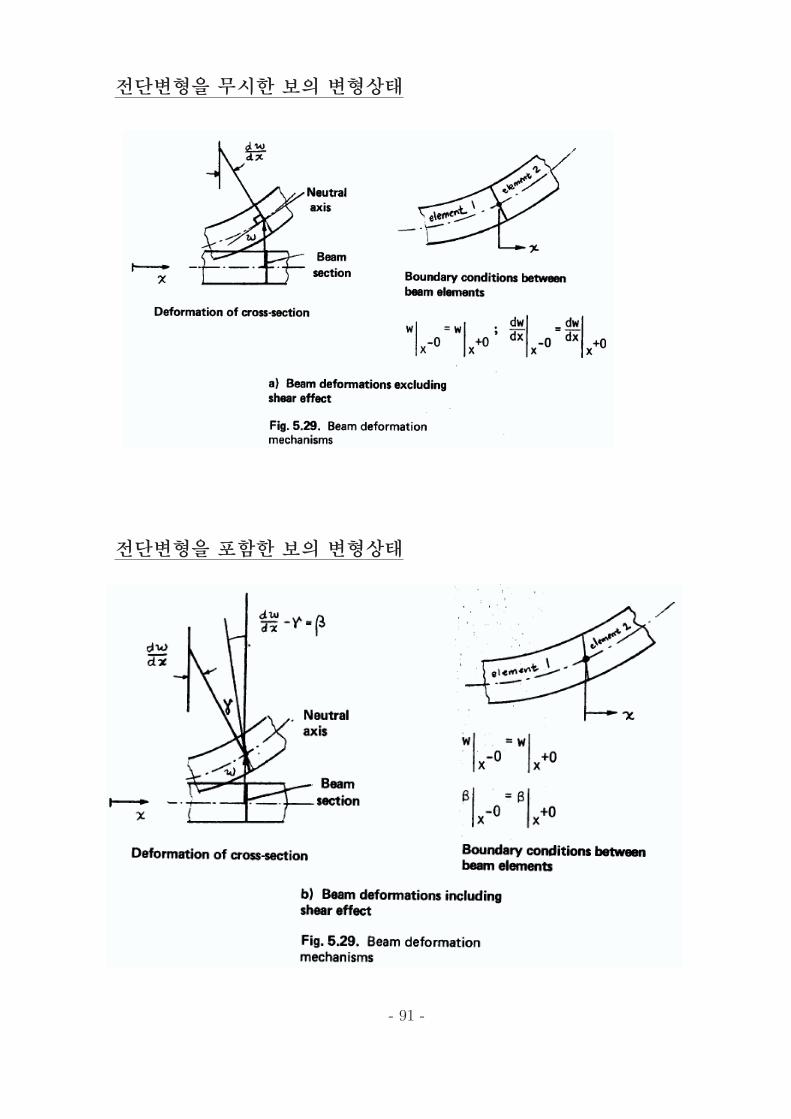
전단변형을 무시한 보의 변형상태
전단변형을 포함한 보의 변형상태
- 91 -

변형율과 응력의 계산
β =dw
dx− γ
τ =V
As; γ =
τ
G; κ =
As
A
범함수 (Potential Function)
Π =EI
2
∫ L
0
(dβ
dx
)2
dx +GAκ
2
∫ L
0
(dw
dx− β
)2
dx
−∫ L
0pwdx−
∫ L
0mβdx
지배 방정식 (Governing Equation)
EI∫ L
0
(dβ
dx
)δ
(dβ
dx
)dx + GAκ
∫ L
0
(dw
dx− β
)δ
(dw
dx− β
)dx
−∫ L
0pδwdx−
∫ L
0mδβdx = 0
- 92 -

- 93 -

사용되는 보간함수
w =q∑
i=1hiwi; β =
q∑i=1
hiθi
w = HwU; β = HβU
∂w
∂x= BwU;
∂β
∂x= BβU
형상과 변위의 보간행렬
UT =[
w1 · · · wq θ1 · · · θq
]
Hw =[
h1 · · · hq 0 · · · 0]
Hβ =[
0 · · · 0 h1 · · · hq
]
변형율 보간행렬
Bw = J−1[
∂h1
∂r· · · ∂hq
∂r0 · · · 0
]
Bβ = J−1[
0 · · · 0∂h1
∂r· · · ∂hq
∂r
]
- 94 -

유한요소 행렬
K = EI∫ 1
−1BT
βBβ det J dr + GAκ∫ 1
−1(Bw −Hβ)
T (Bw −Hβ) det J dr
and
R =∫ 1
−1HT
w p det J dr +∫ 1
−1HT
β m det J dr
보간 함수의 차수에 관한 고찰
Π =∫ L
0
(dβ
dx
)2
dx + α∫ L
0
(dw
dx− β
)2
dx;
α =GAκ
EI
관찰사항
• parabolic (또는 고차) 요소 사용
• discrete Kirchhoff 이론
• 감차 수치 적분 (reduced integration)
- 95 -
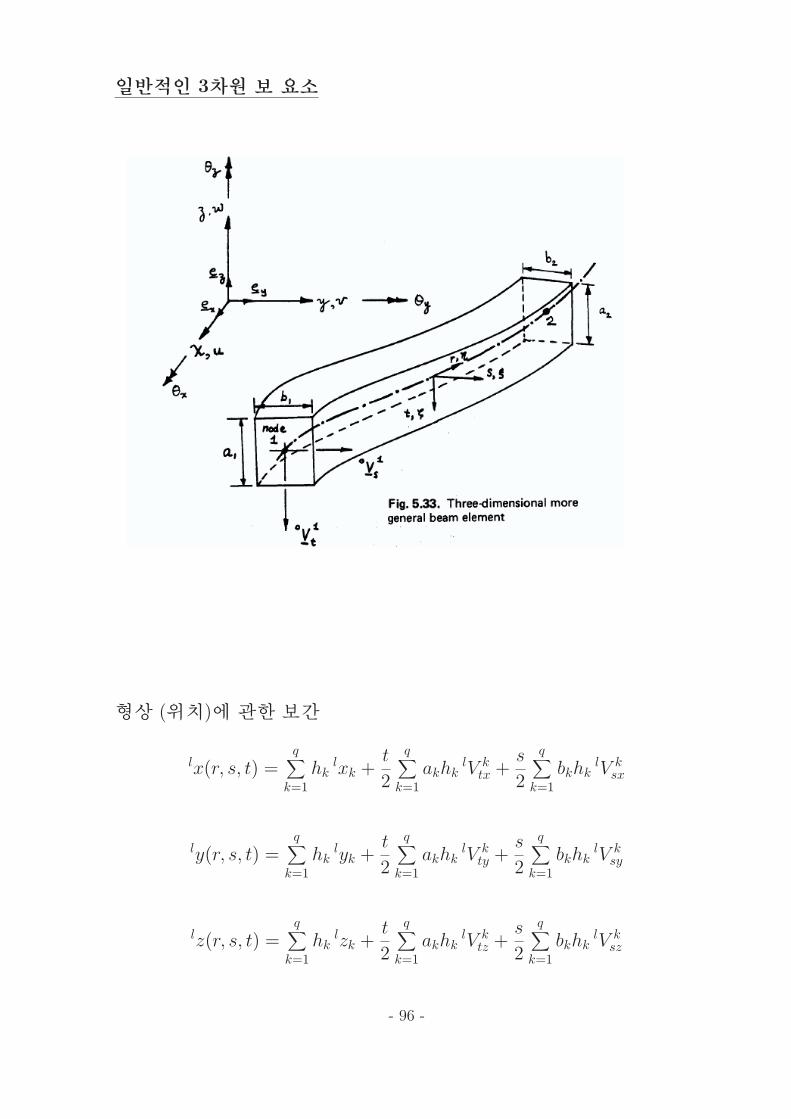
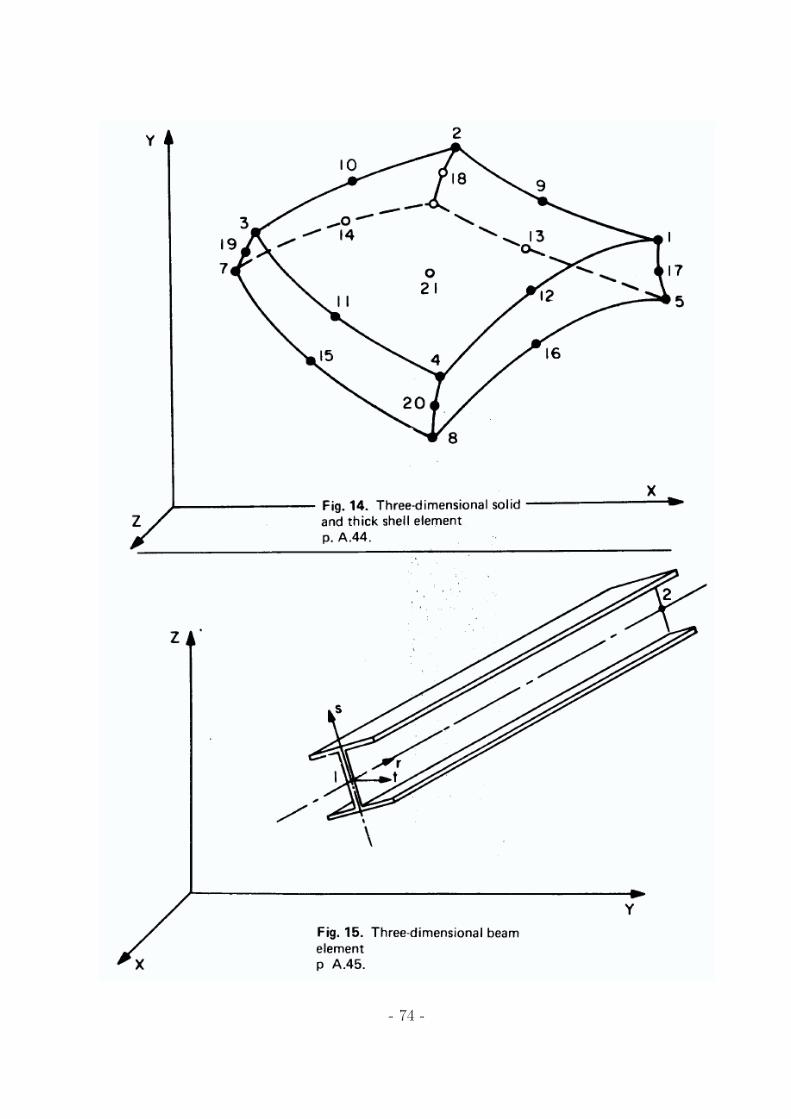
일반적인 3차원 보 요소
형상 (위치)에 관한 보간
lx(r, s, t) =q∑
k=1hk
lxk +t
2
q∑k=1
akhklV k
tx +s
2
q∑k=1
bkhklV k
sx
ly(r, s, t) =q∑
k=1hk
lyk +t
2
q∑k=1
akhklV k
ty +s
2
q∑k=1
bkhklV k
sy
lz(r, s, t) =q∑
k=1hk
lzk +t
2
q∑k=1
akhklV k
tz +s
2
q∑k=1
bkhklV k
sz
- 96 -

변위 계산
u(r, s, t) = 1x− 0x
v(r, s, t) = 1y − 0y
w(r, s, t) = 1z − 0z
isoparametric 보 요소의 변위 보간
u(r, s, t) =q∑
k=1hkuk +
t
2
q∑k=1
akhkVktx +
s
2
q∑k=1
bkhkVksx
v(r, s, t) =q∑
k=1hkvk +
t
2
q∑k=1
akhkVkty +
s
2
q∑k=1
bkhkVksy
w(r, s, t) =q∑
k=1hkwk +
t
2
q∑k=1
akhkVktz +
s
2
q∑k=1
bkhkVksz
마지막으로 방향벡터 (director vector) Vkt 와 Vk
s 를 직교 좌표축인 x,
y, z 의 회전에 대해 표현하면
Vkt = θk × 0Vk
t
Vks = θk × 0Vk
s
여기서
θk =
⎡⎢⎢⎢⎢⎢⎣
θkx
θky
θkz
⎤⎥⎥⎥⎥⎥⎦
- 97 -

변형율 및 응력의 계산 ⎡⎢⎢⎢⎣
εηη
γηξ
γηζ
⎤⎥⎥⎥⎦ =
q∑k=1
Bkuk
여기서
uTk =
[uk vk wk θk
x θky θk
z
]
보 요소 내부의 응력
⎡⎢⎢⎢⎢⎢⎣
τηη
τηξ
τηζ
⎤⎥⎥⎥⎥⎥⎦ =
⎡⎢⎢⎢⎢⎢⎣
E 0 0
0 Gκ 0
0 0 Gκ
⎤⎥⎥⎥⎥⎥⎦
⎡⎢⎢⎢⎢⎢⎣
εηη
γηξ
γηζ
⎤⎥⎥⎥⎥⎥⎦
- 98 -

평판 요소의 수식화
변형율의 계산
⎡⎢⎢⎢⎣
εxx
εyy
γxy
⎤⎥⎥⎥⎦ = z
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
∂βx
∂x
−∂βy
∂y
∂βx
∂y− ∂βy
∂x
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
⎡⎣ γyz
γzx
⎤⎦ =
⎡⎢⎢⎢⎢⎢⎣
∂w
∂y− βy
∂w
∂x+ βx
⎤⎥⎥⎥⎥⎥⎦
- 99 -

응력의 계산
⎡⎢⎢⎢⎣
τxx
τyy
τxy
⎤⎥⎥⎥⎦ = z
E
1− ν2
⎡⎢⎢⎢⎢⎢⎢⎣
1 ν 0
ν 1 0
0 01− ν
2
⎤⎥⎥⎥⎥⎥⎥⎦
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
∂βx
∂x
−∂βy
∂y
∂βx
∂y− ∂βy
∂x
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
⎡⎣ τyz
τzx
⎤⎦ =
E
2(1 + ν)
⎡⎢⎢⎢⎢⎢⎣
∂w
∂y− βy
∂w
∂x+ βx
⎤⎥⎥⎥⎥⎥⎦
요소의 총 potential은 다음과 같다.
Π =1
2
∫A
∫ h/2
−h/2
[εxx εyy γxy
]⎡⎢⎢⎢⎣
τxx
τyy
τxy
⎤⎥⎥⎥⎦ dz dA (1)
+k
2
∫A
∫ h/2
−h/2
[γyz γzx
] ⎡⎣ τyz
τzx
⎤⎦ dx dA−
∫A
w pdA (2)
두께에 대한 적분을 해석적으로 수행하면
Π =1
2
∫A
κT Cb κ dA +1
2
∫A
γT Cs γ dA−∫A
w p dA
- 100 -

범함수에 사용되는 행렬의 정의는 다음과 같다.
κ =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
∂βx
∂x
−∂βy
∂y
∂βx
∂y− ∂βy
∂x
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦; γ =
⎡⎢⎢⎢⎢⎢⎣
∂w
∂y− βy
∂w
∂x+ βx
⎤⎥⎥⎥⎥⎥⎦
Cb =Eh3
12(1− ν2)
⎡⎢⎢⎢⎢⎢⎢⎣
1 ν 0
ν 1 0
0 01− ν
2
⎤⎥⎥⎥⎥⎥⎥⎦ ;
Cs =Ehk
2(1 + ν)
⎡⎣ 1 0
0 1
⎤⎦
δΠ = 0의조건을이용하면평판요소에대한가상일의원리를적용할
수 있다.
∫A
δκT Cb κ dA +∫A
δγT Cs γ dA−∫A
δw p dA = 0
유한요소법을 적용하기 위한 보간 함수를 다음과 같이 사용한다.
w =q∑
i=1hiwi; βx =
q∑i=1
hiθiy; βy =
q∑i=1
hiθix
and
x =q∑
i=1hixi; y =
q∑i=1
hiyi
- 101 -

쉘 요소의 수식화
쉘 요소에 대해 일반적인 보 요소의 수식을 작성하면
lx(r, s, t) =q∑
k=1hk
lxk +t
2
q∑k=1
akhklV k
nx
ly(r, s, t) =q∑
k=1hk
lyk +t
2
q∑k=1
akhklV k
ny
lz(r, s, t) =q∑
k=1hk
lzk +t
2
q∑k=1
akhklV k
nz
- 102 -

형상에 관한 보간으로부터 변위에 관한 보간을 구할 수 있다.
u(r, s, t) =q∑
k=1hkuk +
t
2
q∑k=1
akhk V knx
v(r, s, t) =q∑
k=1hkvk +
t
2
q∑k=1
akhk V kny
w(r, s, t) =q∑
k=1hkwk +
t
2
q∑k=1
akhk V knz
where
Vkn = 1Vk
n − 0Vkn
Vkn를 k 절점에 대한 회전으로 표현하기 위해 다음을 정의한다.
0Vk1 =
(ey × 0Vk
n
)/
∣∣∣ey × 0Vkn
∣∣∣
0Vk2 = 0Vk
n × 0Vk1
이정의에의해방향벡터의변화량을절점의회전량으로다음과같이
기술할 수 있다.
Vkn = −0Vk
2 αk + 0Vk1 βk
- 103 -

마지막으로 아래의 응력 - 변형률 법칙을 알아보면 다음과 같다.
τ = Csh ε
εT =[
εxx εyy εzz γxy γyz γzx
]
CTsh = QT
sh(E
1− ν2
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
1 ν 0 0 0 01 0 0 0 0
0 0 0 01− ν
20 0
sym.1− ν
20
1− ν
2
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
)Qsh
- 104 -

- 105 -

8 수치 적분 및 모델링의 고려사항
강의 개요
• 등 매개 변수 요소 행렬의 연산
• 수치 적분: Gauss Quadrature, Newton-Cote 공식
• 활용되는 기본 개념과 수치 적분의 수행 방법
• 실용성에 관한 토의
• 수치 적분의 사용 차수 및 예제
• 응력 계산
• 1, 2, 3 차원 해석과 평판, 쉘 해석에 필요한 요소와 적분 차수
• 요소를 이용한 모델링에 관한 토의
수치 적분, 모델링 검토
• Newton-Cote formula
• Gauss Quadrature
• 실용적인 검토
• 요소의 선택
- 106 -

유한요소 해석을 위한 행렬
K =∫V
BT CB dV
M =∫V
ρHT H dV
RB =∫V
HT fB dV
RS =∫SHST
fS dS
RI =∫V
BT τ I dV
위의 행렬에서 isoparametric 유한 요소 해석의 경우에는 다음의 기본
행렬을 계산하여야 한다.
• 변위 보간 행렬 H(r, s, t)
• 변형률 – 변위 보간 행렬 B(r, s, t)
• 여기서 r, s, t 는 각각 -1 에서 1 까지 변한다.
따라서 행렬의 계산을 위한 미소 체적은 다음과 같다.
dV = detJ dr ds dt
따라서 2차원 문제의 경우 (단위 두께)에는 다음과 같은 적분을 계산
하여야 한다.
K =∫ 1
−1
∫ 1
−1BT CB detJ dr ds
M =∫ 1
−1
∫ 1
−1ρHT H detJ dr ds
- 107 -

적분의 계산은 다음과 같이 수치 적분을 사용함으로써 효과적으로 수
행될 수 있다.
K =∑i
∑j
αij Fij
where
- i, j : 적분점의 갯수
- αij : weight coeff.
- Fij = BTij CBij detJij
- 108 -

- 109 -

Newton-Cote 적분에서 같은 거리에 있는 sampling point 를 사용한다.
∫ b
aF (r)dr = (b− a)
n∑i=0
Cni Fi + Rn
- n : number of intervals
- Cni : Newton-Cote 상수
보간 다항식의 차수는 n 차이다.
- 110 -

가우스 적분에서는 다음을 이용한다.
∫ b
aF (r)dr = α1F (r1) + α2F (r2) + · · ·+ αnF (rn) + Rn
weight인 α1, · · · , αn 과 sampling points인 r1, · · · , rn 은모두변수이다.
보간 다항식의 차수는 2n− 1 이다.
- 111 -
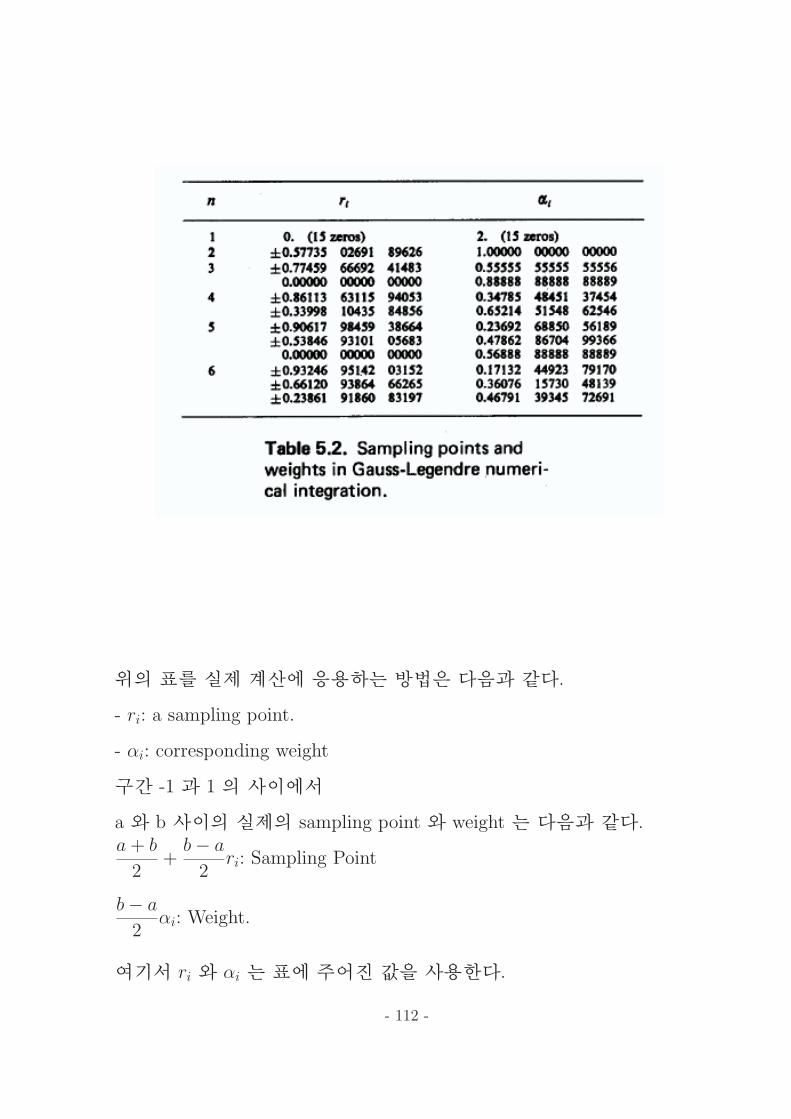
위의 표를 실제 계산에 응용하는 방법은 다음과 같다.
- ri: a sampling point.
- αi: corresponding weight
구간 -1 과 1 의 사이에서
a 와 b 사이의 실제의 sampling point 와 weight 는 다음과 같다.a + b
2+
b− a
2ri: Sampling Point
b− a
2αi: Weight.
여기서 ri 와 αi 는 표에 주어진 값을 사용한다.
- 112 -
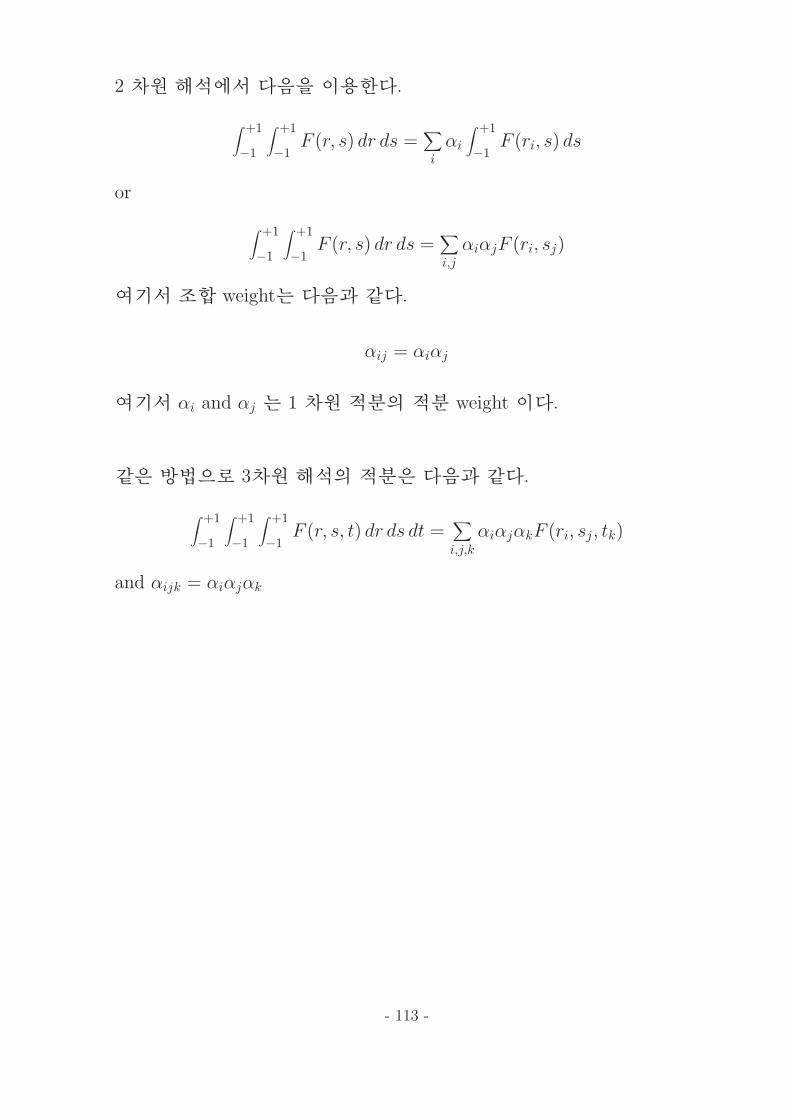
2 차원 해석에서 다음을 이용한다.
∫ +1
−1
∫ +1
−1F (r, s) dr ds =
∑i
αi
∫ +1
−1F (ri, s) ds
or
∫ +1
−1
∫ +1
−1F (r, s) dr ds =
∑i,j
αiαjF (ri, sj)
여기서 조합 weight는 다음과 같다.
αij = αiαj
여기서 αi and αj 는 1 차원 적분의 적분 weight 이다.
같은 방법으로 3차원 해석의 적분은 다음과 같다.
∫ +1
−1
∫ +1
−1
∫ +1
−1F (r, s, t) dr ds dt =
∑i,j,k
αiαjαkF (ri, sj, tk)
and αijk = αiαjαk
- 113 -

수치 적분의 적용시의 고려사항
• 특정 요소 행렬의 전개에 필요한 적분의 차수는 적분할 함수인 F
에 의해 산출할 수 있다.
• 실제로 적분을 정확하게 수행하지 않는 경우가 있는데 이 경우에도 유한요소 해석에서는 충분히 높은 차수의 수치 적분을 사용하
여야 한다.
요소 행렬의 계산시의 고려사항
요소 행렬을 유도할때 다음의 요구조건에 주의해야 한다.
• 강성 행렬의 유도
– 요소 행렬은 가상의 zero energy mode 를 포함하지 않는다.
(요소 강성 행렬의 rank 는 정확히 유도된 것보다 작지 않다.)
– 요소는 요구되는 constant strain state를 포함하여야 한다.
• 질량 행렬의 유도
– 요소 전체의 질량이 포함되어야 한다.
• 힘 벡터 유도
– 부하 전체가 포함되어야 한다.
- 114 -
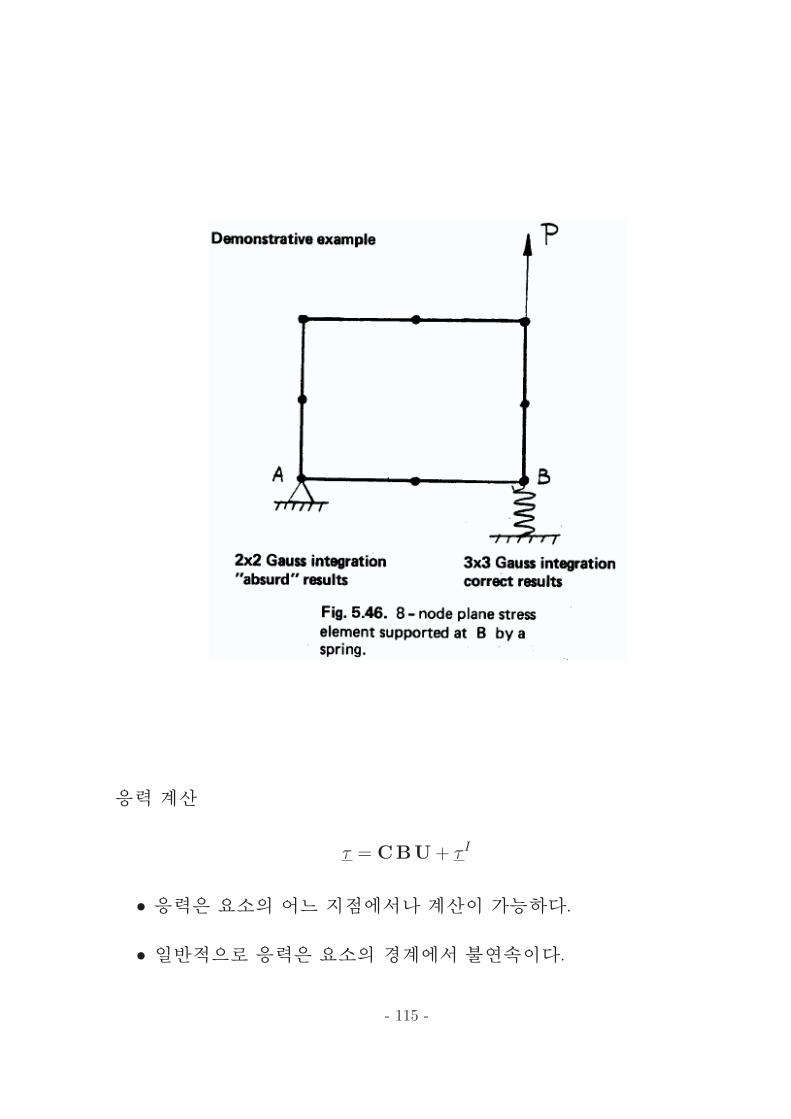
응력 계산
τ = CBU + τ I
• 응력은 요소의 어느 지점에서나 계산이 가능하다.
• 일반적으로 응력은 요소의 경계에서 불연속이다.
- 115 -
- 116 -

모델링시 고려사항
• 예상되는 반응에 대한 충분한 지식
• 역학에 대한 폭넓은 지식과 유한 요소 해석이 유용한 범위
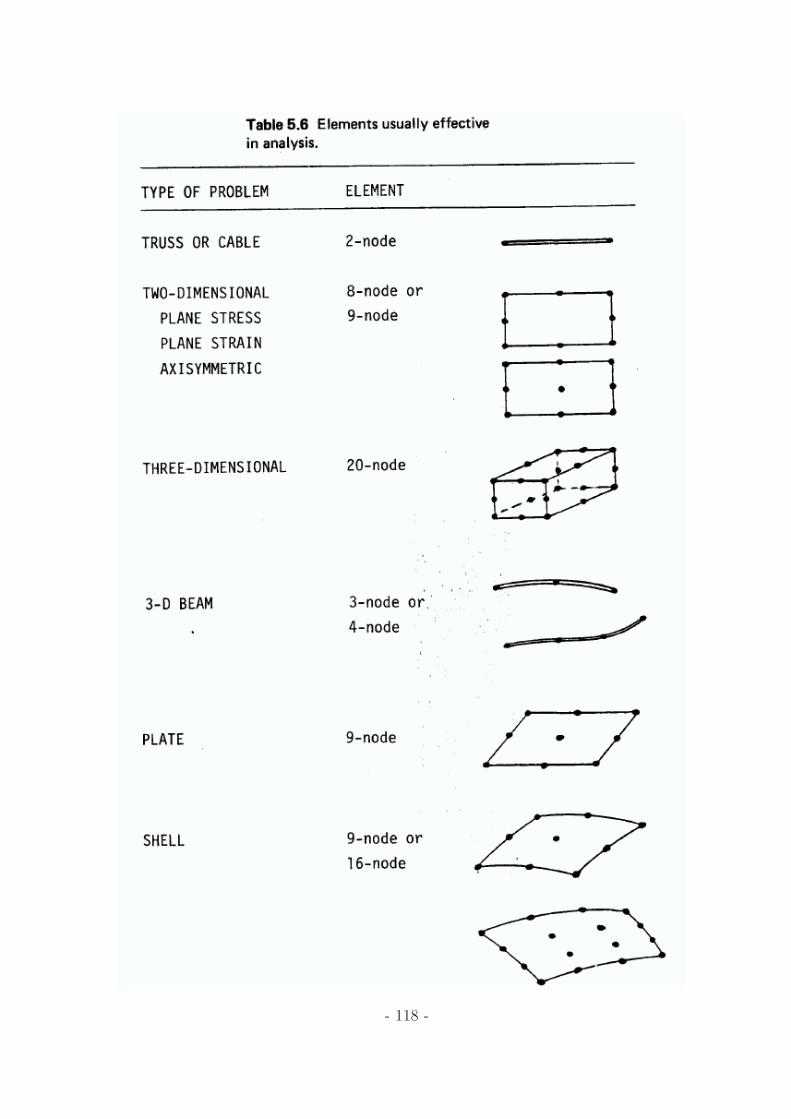
• parabolic/undistorted 요소는 일반적으로 가장 효과적이다.
- 117 -
- 118 -

- 119 -

9 정적 해석에서의 유한 요소 평형 방정식의 해
강의 개요
• 정적 해석에서의 유한 요소 방정식의 해
• 기본적인 가우스 소거법
• Static Condensation
• Substructuring
• Multi - level Substructuring
• Frontal solution (ANSYS)
• LDLT - factorization
(column reduction; SAP, ADINA)
• Cholesky factorization
• 큰 계에 대한 Out-of-core solution
• 간단한 예제를 통한 기본적인 기술의 증명
• 사용된 기본적인 처리에 대한 물리적인 설명
- 120 -
정적 해석의 평형 방정식에 대한 해
KU = R
• 반복적 방법 (e.g. Gauss-Seidel)
• 직접적인 방법: 여러가지 형태가 있으며 근본적으로 가우스 소거
법의 변형이다
– static condensation
– substructuring
– frontal solution
– LDLT - factorization
– Cholesky decomposition
– Crout
– Column Reduction(skyline solution)
기본적인 가우스 소거법의 과정
⎡⎢⎢⎢⎢⎢⎢⎣
5 −4 1 0−4 6 −4 1
1 −4 6 −40 1 −4 5
⎤⎥⎥⎥⎥⎥⎥⎦
⎡⎢⎢⎢⎢⎢⎢⎣
U1
U2
U3
U4
⎤⎥⎥⎥⎥⎥⎥⎦ =
⎡⎢⎢⎢⎢⎢⎢⎣
0100
⎤⎥⎥⎥⎥⎥⎥⎦
- 121 -

1 단계
첫번째행에적당한값을곱하고나머지행으로부터빼서, 1행을제외
한 1열의 성분을 0 으로 만든다.
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
5 −4 1 0
014
5−16
51
0 −16
5
29
5−4
0 1 −4 5
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
⎡⎢⎢⎢⎢⎢⎢⎣
U1
U2
U3
U4
⎤⎥⎥⎥⎥⎥⎥⎦ =
⎡⎢⎢⎢⎢⎢⎢⎣
0100
⎤⎥⎥⎥⎥⎥⎥⎦
2 단계
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
5 −4 1 0
014
5−16
51
0 015
7−20
7
0 0 −20
7
65
14
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
⎡⎢⎢⎢⎢⎢⎢⎣
U1
U2
U3
U4
⎤⎥⎥⎥⎥⎥⎥⎦ =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
0
1
8
7
− 5
14
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
- 122 -

3 단계
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
5 −4 1 0
014
5−16
51
0 015
7−20
7
0 0 05
6
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
⎡⎢⎢⎢⎢⎢⎢⎣
U1
U2
U3
U4
⎤⎥⎥⎥⎥⎥⎥⎦ =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
0
1
8
77
6
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
back substitution
미지수 U4, U3, U2, U1을 구한다.
U4 =
7
65
6
=7
5; U3 =
8
7−
(−20
7
)U4
15
7
=12
5
U2 =1−
(−16
5
)U3 − (1) U4
14
5
=13
5
U1 =0− (−4)
19
35− (1)
36
15− (0)
7
55
=8
5
- 123 -

Static Condensation
partition matrix into
⎡⎣ Kaa Kac
Kca Kcc
⎤⎦
⎡⎣ Ua
Uc
⎤⎦ =
⎡⎣ Ra
Rc
⎤⎦
Hence
Uc = K−1cc (Rc −Kca Ua)
and
(Kaa −Kac K
−1cc Kca
)︸ ︷︷ ︸
Kaa
Ua = Ra −Kac K−1cc Rc
Example
⎡⎢⎢⎢⎢⎢⎢⎣
5 −4 1 0
−4 6 −4 11 −4 6 −40 1 −4 5
⎤⎥⎥⎥⎥⎥⎥⎦
⎡⎢⎢⎢⎢⎢⎢⎣
U1
U2
U3
U4
⎤⎥⎥⎥⎥⎥⎥⎦ =
⎡⎢⎢⎢⎢⎢⎢⎣
0
100
⎤⎥⎥⎥⎥⎥⎥⎦
Static Condensation 의 식을 이용하면
Kaa =
⎡⎢⎢⎢⎣
6 −4 1−4 6 −4
1 −4 5
⎤⎥⎥⎥⎦−
⎡⎢⎢⎢⎣−4
10
⎤⎥⎥⎥⎦
[1/5
] [ −4 1 0]
so that
Kaa =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎣
14
5−16
51
−16
5
29
5−4
1 −4 5
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎦
- 124 -

Gauss Elimination의 물리적 의미
- 125 -

Substructuring
• 부구조물 (substructure)의내부자유도에대해서 static condensa-
tion을 사용한다.
• 결과로서경계점의자유도만으로구성되는작은크기의강성행렬이 구해진다.
Example
- 126 -

먼저 방정식을 재배열한다.
EA1
6L
⎡⎢⎢⎢⎣
17 3 −203 25 −28
−20 −28 48
⎤⎥⎥⎥⎦
⎡⎢⎢⎢⎣
U1
U3
U2
⎤⎥⎥⎥⎦ =
⎡⎢⎢⎢⎣
R1
R3
R2
⎤⎥⎥⎥⎦
Static condensation을 이용하여 U2를 소거한다.
EA1
6L
⎧⎨⎩⎡⎣ 17 3
3 25
⎤⎦−
⎡⎣ −20−28
⎤⎦ [
1
48
] [ −20 −28]⎫⎬⎭
⎡⎣ U1
U3
⎤⎦ =
⎡⎢⎢⎢⎢⎢⎣
R1 +20
48R2
R3 +28
48R2
⎤⎥⎥⎥⎥⎥⎦
내부 절점의 소거후의 방정식은 다음과 같다.
13
9
EA1
L
⎡⎣ 1 −1−1 1
⎤⎦
⎡⎣ U1
U3
⎤⎦ =
⎡⎢⎢⎢⎢⎢⎣
R1 +5
12R2
R3 +7
12R2
⎤⎥⎥⎥⎥⎥⎦
소거된 절점에 관한 식은 다음과 같다.
U2 =1
24
(3L
EA1R2 + 10U1 + 14U3
)
- 127 -

- 128 -

Frontal Solution
• Frontal solution은절점의자유도에관한연속적인 Static Conden-
sation으로 구성된다.
• 풀이는 요소의 번호 순서대로 진행된다.
• 만약에 wave front solution의 요소 번호의 순서가 skyline solution
의 절점 번호의 순서와 같다면, frontal solution 은 skyline solution
과 같은 양의 계산이 필요하다.
- 129 -

LDLT factorization
• 이방법은 skyline solution의근간이된다.(column reduction scheme)
• 기본 step
L−11 K = K1
Example
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
1
4
51
−1
50 1
0 0 0 1
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
⎡⎢⎢⎢⎢⎢⎢⎣
5 −4 1 0−4 6 −4 1
1 −4 6 −40 1 −4 5
⎤⎥⎥⎥⎥⎥⎥⎦ =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
5 −4 1 0
014
5−16
51
0 −16
5
29
5−4
0 1 −4 5
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
여기에서 L1은 다음과 같다.
L−11 =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
1
4
51
−1
50 1
0 0 0 1
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦; L1 =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
1
−4
51
1
50 1
0 0 0 1
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
- 130 -

같은 방법으로 계속 진행하면
L−1n−1 L−1
n−2 · · ·L−12 L−1
1 K = S
S =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
X X X X · · · XX X X · · · X
X · · · · · · X
X · · · X. . .
X
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
⎫⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭
uppertriangularmatrix
따라서
K = (L1 L2 · · · Ln−2 Ln−1)S
or
K = LS ; L = L1 L2 · · · Ln−2 Ln−1
또한 K는 대칭행렬이므로
K = LDLT ;
where
D : 대각 행렬 ; dii = sii
- 131 -

Cholesky factorization
K = LLT
where
L = LD1/2
방정식의 해
using
K = LDLT
we have
LV = R
DLT U = V
where
V = L−1n−1 · · · L−1
2 L−11 R
and
LT U = D−1 V
- 132 -

Column Reduction Scheme
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
5 −4 1
6 −4 1
6 −4
5
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
⇓⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
5 −4
51
14
5−4 1
6 −4
5
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
⇓⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
5 −4
5
1
514
5−8
71
15
7−4
5
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
⇓⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
5 −4
5
1
514
5−8
7
5
1415
7−4
35
6
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
- 133 -

Skyline Solution
- 134 -

- 135 -

10 동적 해석에서의 유한 요소 평형 방정식의 해
강의 개요
• 직접 적분에 의한 동적 반응의 해
• 사용되는 기본 개념
• 직접적 기법과 간접적 기법
• 각종 기법의 구현방법
• Central Difference 방법과 Newmark 방법의 수식화
• 안정성과 정확성 검토
• 적분 오차
• 구조 진동과 파동 전파 문제
• 요소와 time step size의 결정
• 실제 문제에의 활용
- 136 -
동적 해석에서의 평형 방정식의 직접 적분
MU + CU + KU = R
• explicit, implicit 적분
• 수치계산상의 고려점
• time step (Δt)의 결정
• 모델링의 고려사항
동적 해석의 평형 방정식
MU + CU + KU = R
or
FI(t) + FD(t) + FE(t) = R(t)
- 137 -

Central Difference Method(CDM)
tU =1
Δt2{
t−ΔtU− 2 tU + t+ΔtU}
tU =1
2Δt
(−t−ΔtU + t+ΔtU)
M tU + C tU + K tU = tR
=⇒ Explicit 적분 방법
- 138 -
CDM 을 이용하면 평형 방정식은 다음의 형태로 된다.
(1
Δt2M +
1
2ΔtC
)t+ΔtU = tR−
(K− 2
Δt2M
)tU−
(1
Δt2M− 1
2ΔtC
)t−ΔtU
여기서
K tU =
(∑m
K(m))
tU
=∑m
(K(m) tU
)
=∑m
tF(m)
연산시 고려사항
• 반복연산을 시작시키기 위하여 다음식을 사용한다.
−ΔtU (i) = 0U (i) −Δt 0U (i) +Δt2
20U (i)
• 실제적으로대부분의경우 Lumped Mass Matrix와저차의요소를
사용한다.
- 139 -
CDM 의 안정성과 정확성
• Δt 는 반드시 Δtcr 보다 작아야 한다.
Δtcr = Tn
π ; Tn = smallest natural period in the system.
이 경우에 이 방법은 조건적으로 안정하다.
• 실제에 있어 연속체의 문제에서는 다음식을 사용한다.
Δt ≤ ΔL
c; c =
√√√√E
ρ
Time step과 사용법
• 저차의 요소에 대해ΔL : 절점과 절점 사이의 거리중 가장 가까운 거리
• 고차의 요소에 대해ΔL :절점과절점사이의거리중가장가까운거리를 (rel. stiffness
factor) 로 나눈값
• CDM은주로파동전파 (wave propagation analysis)해석에사용된
다.
• 처리과정의횟수는사용된요소의수와 time step의수에비례한
다.
- 140 -

THE NEWMARK METHOD
t+ΔtU = tU +[(1− δ) tU + δ t+ΔtU
]Δt
t+ΔtU = tU + tUΔt +
[(1
2− α
)tU + α t+ΔtU
]Δt2
M t+ΔtU + C t+ΔtU + K t+ΔtU = t+ΔtR
다음식을 사용하여 implicit integration을 행한다.
K t+ΔtU = t+ΔtR
• 실제 대부분 다음 값을 사용한다.
α =1
4, δ =
1
2
이 방법을 일정 평균 가속도 방법(Newmark’s method) 라 한다.
• 이 방법은 무조건적으로 안정하다. (Unconditionally stable)
• 이 방법은 처음에는 구조 동역학 문제의 해석에 이용되었다.
• Number of operations:
.= 12nm2 + 2nmt
- 141 -

정확성 검토
• Time Step Δt 는 단지 정확도의 고려에 의해서 선택되어짐.
• 방정식을 고려하여 필요한 time step을 결정함.
MU + CU + KU = R
Mode의 형상은 고유벡터의 합성으로 표현된다.
U =n∑
i=1φ
ixi(t)
여기서 다음의 고유치 문제를 만족하여야 한다.
Kφi= ω2
i Mφi
다음의 좌표변환을 생각하면,
ΦT KΦ = Ω2 ; ΦT MΦ = I
where
Φ =[
φ1, · · · , φn
]; Ω2 =
⎡⎢⎢⎢⎣
ω21
. . .
ω2n
⎤⎥⎥⎥⎦
위 식을 풀면 n 개의 방정식을 얻는데 이로부터 xi(t) 의 해를 구한다.
xi + ω2i xi = φT
iR i = 1, . . . , n
- 142 -
따라서 step-by step 해석은 다음의 연쇄계 해석을 위하여 각각의 고유
모드의 합성을 행하는 것과 같다. 즉,
MU + KU = R
의 해석을 위하여 다음의 step-by-step solution 을 행하는 것이다.
xi + ω2i xi = φT
iR i = 1, . . . , n
여기서
U =n∑
i=1φ
ixi
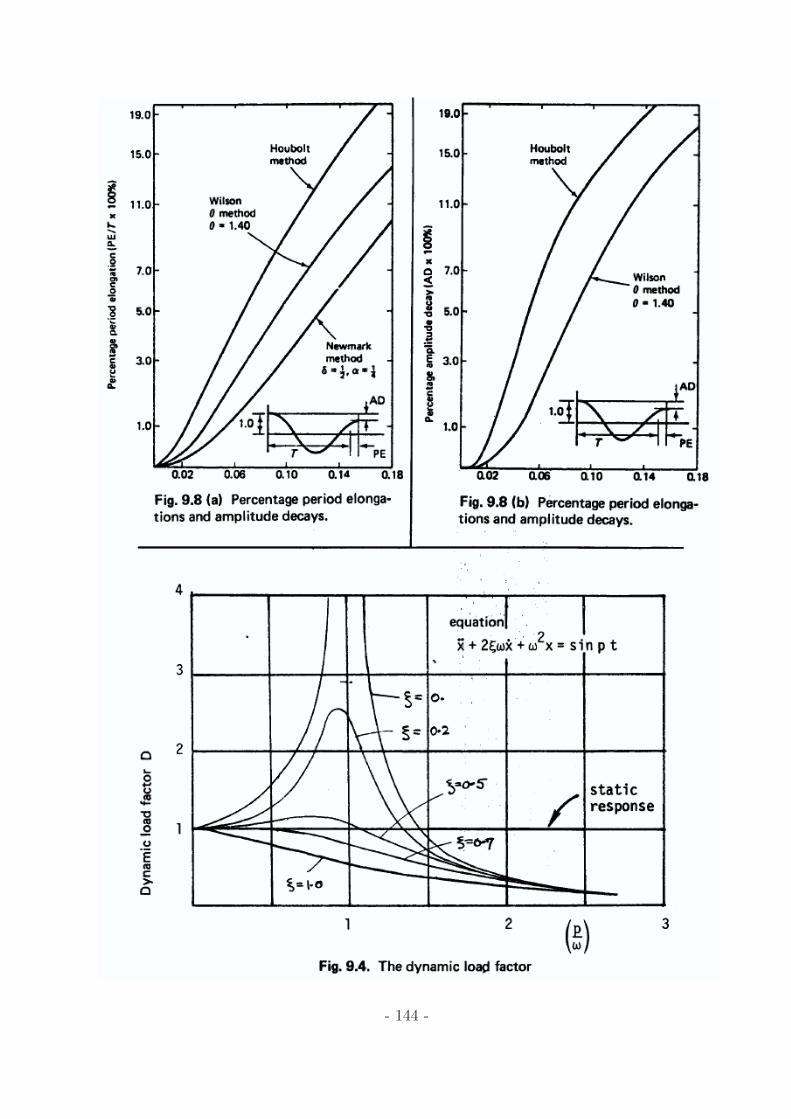
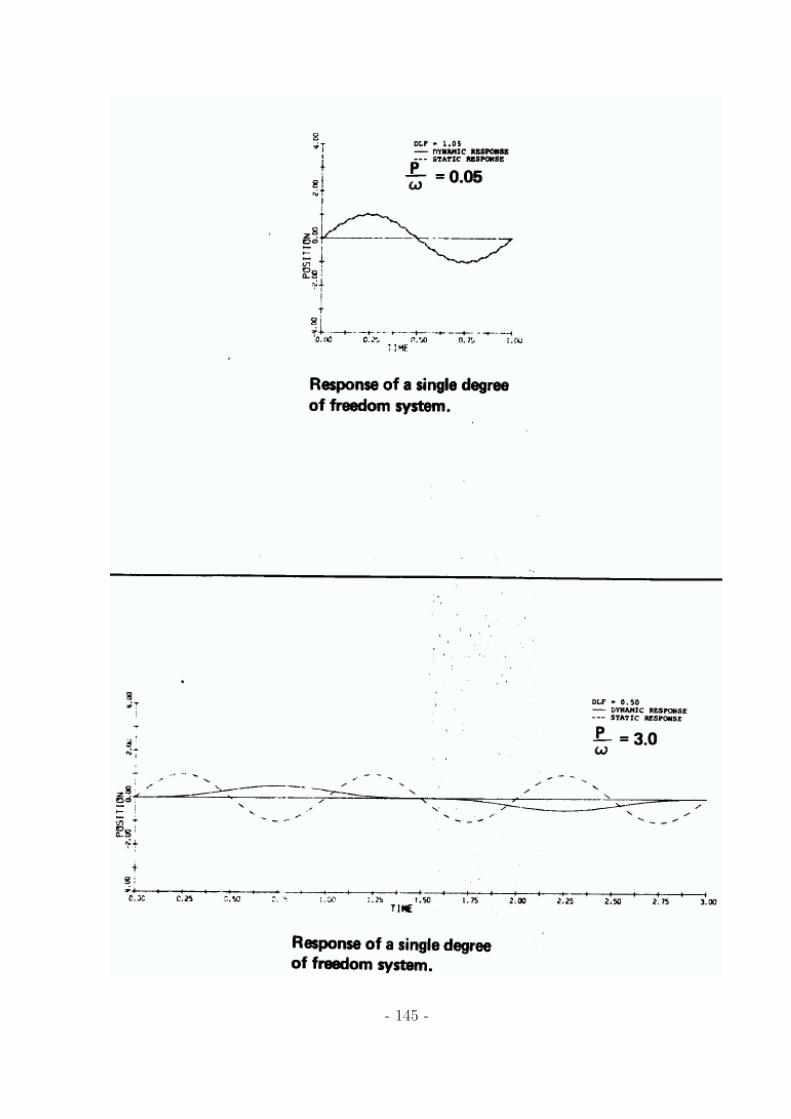
따라서 Newmark method의정확성을예측하기위하여,다음의 1자유
도 방정식의 근을 조사할 수 있다.
x + ω2x = r
Example
x + ω2x = 0
0x = 1.0 ; 0x = 0 ; 0x = −ω2
- 143 -
- 144 -
- 145 -

구조 진동 문제의 모델링
• 필요한 경우에 Fourier 해석을 이용하여 하중에 포함되어 있는 주
파수의 검출
• 하중에 포함되어 있는 ωu 의 4 배 이상의 영역까지 잘 표현하는
유한 요소 격자의 선택
• 직접적분의 수행.
이 해에 사용한 time step Δt 는 120Tu 와 같아야 한다. 이 때 Tu =
2π/ωu 이거나 안정성의 이유에서 이보다 작아야 한다.
파동 전파 (Wave Propagation) 문제의 모델링
파장의 길이가 Lw 라고 가정하면, 파동이 한 점을 지나는 총 시간은
다음과 같다.
tw =Lw
c
여기서 c 는 파동의 속도이다. n이 파동을 표현하기 위해 필요한 time
step 이라 가정하면, 다음을 사용할 수 있다.
Δt =twn
유한 요소의 효과적인 길이 (effective length) 는 다음이 된다.
Le = cΔt
- 146 -

요약: step-by-step integrations
초기 계산
1. 선형 강성 행렬 K, 질량 행렬 M, 감쇠 행렬 C 의 구성;
다음 상수를 계산한다.
• Newmark method:
δ ≥ 0.50, α ≥ 0.25(0.5 + δ)2
a0 = 1/(αΔt2) a1 = δ/(αΔt) a2 = 1/(αΔt) a3 = 1/(2α)− 1
a4 = δ/α− 1 a5 = Δt(δ/α− 2)/2 a6 = a0 a7 = −a2
a8 = −a3 a9 = Δt(1− δ) a10 = δΔt
• Central difference method:
a0 = 1/Δt2 a1 = 1/2Δt a2 = 2a0 a3 = 1/a2
2. 0U, 0U, 0U 값의 초기화
Central difference method에한해초기조건으로부터 ΔtU만을계
산하면 된다. 즉,
ΔtU = 0U + Δt 0U + a30U
3. Effective linear coefficient matrix를 구성함.
• In implicit time integration:
K = K + a0 M + a1 C
• in explicit time integration:
M = a0 M + a1 C
- 147 -

4. implicit time integration 을 사용한 동적 해석에서 는 K 를 삼각
행렬화 한다.
각각의 step 에 대해
1. effective load vector를 구성한다.
• in implicit time integration:
t+ΔtR = t+ΔtR + M(a0
tU + a2tU + a3
tU)
+ C(a1
tU + a4tU + a5
tU)
• in explicit time integration:
tR = tR + a2M(tU− t−ΔtU
)+ M t−ΔtU− tF
2. 변위의 증분에 대해 해를 구한다.
• in implicit time integration:
K t+ΔtU = t+ΔtR ; U = t+ΔtU− tU
• in explicit time integration:
M t+ΔtU = tR
3. 변위 변수의 계산
• Newmark Method
t+ΔtU = a6U + a7tU + a8
tU
t+ΔtU = tU + a9tU + a10
t+ΔtU
t+ΔtU = tU + U
- 148 -

• Central Difference Method
tU = a1(t+ΔtU− t−ΔtU
)
tU = a0(t+ΔtU− 2 tU + t−ΔtU
)
- 149 -

11 모우드 중첩 해석; time history
강의 개요
• 모우드 중첩에 의한 동적 응답의 해
• 모우드 중첩에 대한 기본 개념
• Decoupled equation의 유도
• 감쇠하의 해와 무감쇠하의 해
• Caughey and Rayleigh damping
• 주어진 감쇠비에 대한 감쇠 행렬 계산
• modal coordinates 개수의 선택
• 오차 및 static correction을 사용한 보정
• 실제 문제에서 고려사항
- 150 -

모우드 중첩 해석
기본 개념 :
동적 평형 방정식을 좀더 유용한 형태의 방정식으로 변환하기 위하여
다음 변환식을 사용한다.
U︸︷︷︸n×1
= P︸︷︷︸n×n
X(t)︸ ︷︷ ︸n×1
P = 변환 행렬
X(t) = 일반화 변위
즉 다음 변환식
U(t) = P X(t)
을 다음 평형식에 적용하면
MU + CU + KU = R
다음 식이 구해진다.
M X(t) + C X(t) + K X(t) = R(t)
여기서
M = PT M P ; C = PT C P ;
K = PT K P ; R = PT R
- 151 -

감쇠를 무시한 자유진동의 평형 방정식의 변위에 대한 해로부터 효과
적인 변환행렬인 P 가 작성된다.
M U + K U = 0
다음과 같은 삼각함수 형태의 해를 가정하면
U = φ sin ω(t− t0)
일반화된 고유치문제의 식을 얻는다.
K φ = ω2 M φ
위의 고유치 문제를 풀면 n개의 고유치 해가 얻어진다.
(ω2
1, φ1
),
(ω2
2, φ2
), . . . ,
(ω2
n, φn
)
그리고 해는 다음 성질을 만족한다.
φTi
M φj
⎧⎨⎩ = 1 ; i = j
= 0 ; i = j
0 ≤ ω21 ≤ ω2
2 ≤ ω23 · · · ≤ ω2
n
- 152 -

다음의 두 행렬을 정의한다.
Φ =[
φ1, φ2, · · · , φn
]; Ω2 =
⎡⎢⎢⎢⎢⎢⎢⎣
ω21
ω22
. . .
ω2n
⎤⎥⎥⎥⎥⎥⎥⎦
이 행렬을 이용하면 고유치 문제를 다음과 같이 기술할 수 있다.
K Φ = M Φ Ω2
여기서 강성행렬과 질량행렬은 다음 조건을 만족한다.
ΦT K Φ = Ω2 ; ΦT M Φ = I
이제 다음의 변환식을 사용한다.
U(t) = Φ X(t)
위의 변환을 사용하면 modal 일반화 변위에 해당되는 평형방정식을
얻을 수 있다.
X(t) + ΦT C Φ X(t) + Ω2 X(t) = ΦT R(t)
X(t) 의 초기 조건은 동일한 변환식과 Φ에 관한 M- orthonormality
조건을 이용하여 구해진다. 즉, t = 0의 경우,
0X = ΦT M 0U ; 0X = ΦT M 0U
- 153 -

감쇠를 무시한 해석
X(t) + Ω2 X(t) = ΦT R(t)
즉, 다음 형태의 n개의 방정식을 풀어야 한다.
xi(t) + ω2i xi(t) = ri(t)
where
ri(t) = φTi
R(t)
⎫⎪⎪⎪⎬⎪⎪⎪⎭ i = 1, 2, . . . , n
여기서 사용되는 초기조건은 다음과 같다.
xi|t=0 = φTi
M 0U
xi|t=0 = φTi
M 0U
Duhamel integral 을 사용하여 다음 식이 구해진다.
xi(t) =1
ωi
∫ t
0ri(τ) sin ωi (t− τ) dτ + αi sin ωit + βi cos ωit
여기서 αi 와 βi는 초기조건으로 부터 구한다.
최종 해석 결과는 개별해의 합성으로 구해진다.
U(t) =n∑
i=1φ
ixi(t)
- 154 -
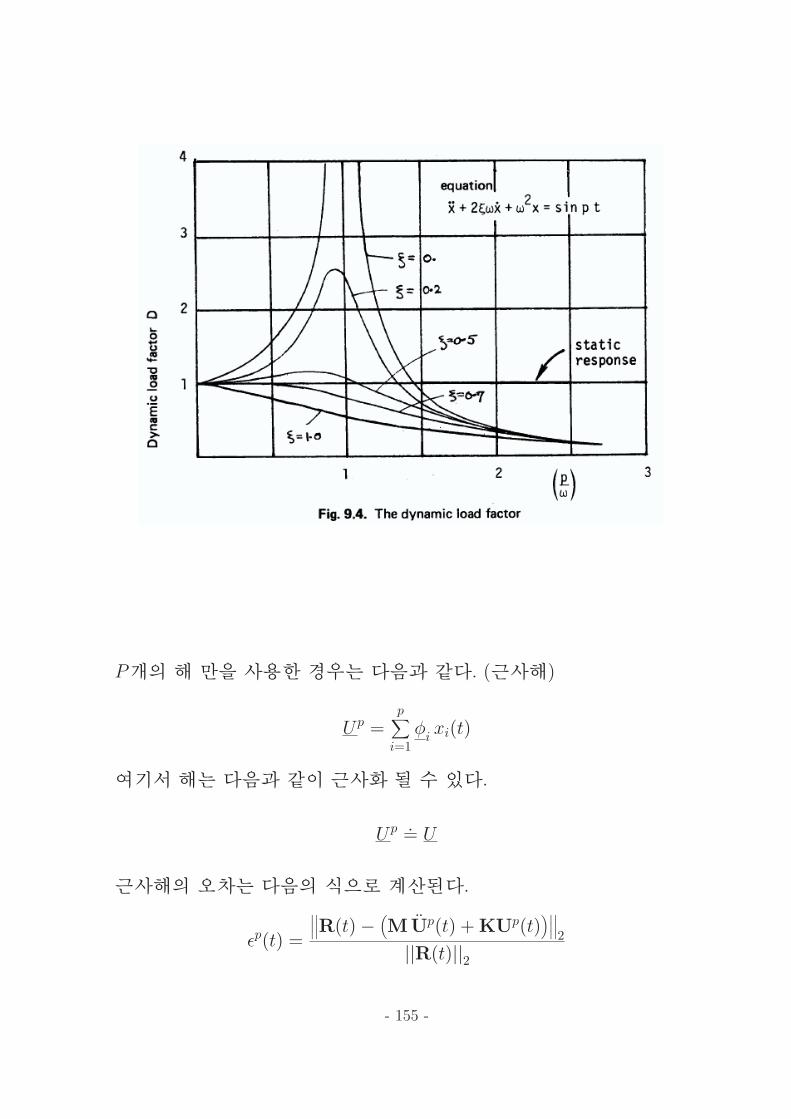
P개의 해 만을 사용한 경우는 다음과 같다. (근사해)
Up =p∑
i=1φ
ixi(t)
여기서 해는 다음과 같이 근사화 될 수 있다.
Up .= U
근사해의 오차는 다음의 식으로 계산된다.
εp(t) =
∣∣∣∣∣∣R(t)− (MUp(t) + KUp(t)
)∣∣∣∣∣∣2
||R(t)||2
- 155 -
Static correction
Up 를 구하기 위해 p개의 mode를 사용한다고 가정하면,
R =n∑
i=1ri(Mφ
i)
따라서,
ri = φTi
R
평형력의 오차는 다음과 같다.
ΔR = R−p∑
i=1ri(Mφ
i)
이 평형력을 사용하여 변위의 보정량을 계산할 수 있다.
K ΔU = ΔR
감쇠를 포함한 해석
일반화 좌표계에서 평형 방정식은 다음과 같다.
X(t) + ΦT C Φ X(t) + Ω2 X(t) = ΦT R(t)
비례적 감쇠인 경우는 다음과 같다.
φTi
C φj= 2ωi ξi δij
따라서 분리된 평형방정식은 다음과 같다.
xi(t) + 2ωi ξi xi(t) + ω2i xi(t) = ri(t) i = 1, . . . , n
- 156 -

비례적감쇄의경우감쇄행렬은 Caughey series를이용하여구해진다.
C = Mp−1∑k=0
ak
[M−1 K
]k
계수들인 ak, k = 1, . . . , p 는 다음의 p 개의 방정식에서 구해진다.
ξi =1
2
(a0
ωi+ a1ωi + a2ω
3i + · · ·+ ap−1ω
2p−3i
)
Rayleigh 감쇠의 특수한 경우,
C = αM + β K
examples:
Assume ξ1 = 0.02 ; ξ2 = 0.10ω1 = 2 ω2 = 3
calculate α and β
다음의 식을 사용한다.
φTi
(αM + β K
)φ
i= 2 ωi ξi
즉,
α + β ω2i = 2 ωi ξi
- 157 -

ω1, ξ1 와 ω2, ξ2 의 관계를 이용하여, α, β 에 대한 2 가지 방정식을
얻는다.
α + 4β = 0.08
α + 9β = 0.60
이 방정식의 해는 다음과 같다.
α = −0.336, β = 0.104
그러므로 시스템의 감쇠 행렬은 다음과 같다.
C = −0.336M + 0.104K
각각의 개별 mode에 대한 식은 다음과 같으므로,
α + βω2i = 2ωiξi
α 와 β가 일단 계산되면, 어떤 i 에 대해서도 다음 식을 감쇄계수를
구할 수 있다.
ξi =α + βω2
i
2ωi
=α
2ωi+
β
2ωi
- 158 -

Response solution
감쇠가 없는 경우와 같이 p 개의 방정식을 푼다.
xi + 2ωi ξi xi + ω2i xi = ri
여기에서 사용하는 초기조건은 다음과 같다.
ri = φTi
R
xi|t=0 = φTi
M 0U
xi|t=0 = φTi
M 0U
최종 근사해는 다음과 같다.
Up =p∑
i=1φ
ixi(t)
실제 문제의 해석시 고려사항
모우드 중첩 해석은 다음과 같은 경우에 효과적이다
• 응답이 소수의 모우드에 크게 지배 받을 경우, p << n
• 응답이 많은 시간 영역 에서 얻어질때 (혹은 modal response가
closed form 으로 얻어질 수 있을때 )
e.g. 지진 진동해석
• εp(t)과 static correction의 계산이 해의 정확도를 위해 중요하다.
- 159 -

12 주파수와 모드 형상의 계산을 위한 풀이 방법
강의 개요
• 유한 요소 고유치 문제의 풀이 방법
• 표준화, 일반화된 고유치 문제
• 벡터 반복 방법, 다항식 반복 기법, Sturm sequence method, 변환
방법의 기본 개념
• 대형 시스템의 고유치 문제
• Determinant Search 및 Subspace Iteration Methods
• 실용적인 고려에 의한 적절한 방법의 선택
- 160 -

고유치 문제의 풀이 방법
• Standard EVP
K︸︷︷︸n×n
φ = λφ
• Generalized EVP
K φ = λM φ←− (λ = ω2)
• Quadratic EVP (K + λC + λ2 M
)φ = 0
• 이 중에서 유한요소 해석에서는 Generalized EVP 가 가장 중요하
다.
e.g. 지진 공학
“Lagre EVP”n > 500 p = 1, . . . , 1
3nm > 60
동적 해석에서, 비례적 감쇠 인 경우,
K φ = ω2 M φ
주파수가 0 인 영역이 존재하면 다음 식을 사용할 수 있다 (Shifting).
K φ + μ M φ =(ω2 + μ
)M φ
혹은
(K + μ M) φ = λM φ
λ = ω2 + μ
or ω2 = λ− μ
- 161 -

- 162 -

전통적인 접근: 일반화된 EVP나, Quadratic EVP 를 변환하여 표준
형태로 바꾸고 이용 가능한 여러 방법으로 문제를 푼다.
예:
K φ = λ M φ
M = L LT ; φ = LT φ
그러므로
K φ = λ φ ; K = L−1 K L−T
혹은
M = W D2 WT etc . . .
- 163 -
일반적으로 유한요소법에서는 직접적인 해법이 더 효과적이다.
다음의 일반화된 EVP 를 고려하면
K φ = λ M φ
여기서 다음 조건을 만족하도록 한다.
0 < λ1
φ1
≤ λ2
φ2
≤ λ3
φ3
≤ · · ·· · ·
≤ λn
φn
Eigenpairs (λi, φi)를 i = 1, . . . , p 혹은 i = r, . . . , s에 대해 구하여야
한다.
해석 대상이 되는 기본 방정식에 대해 고유치 해석법을 적용한다.
- 164 -
Vector Iteration Techniques
다음의 고유치 문제가 주어져 있다.
K φ = λ M φ
위의 방정식을 풀기 위하여 Inverse vector interation 방법을 다음과 같
이 사용한다.
K xk+1 = M xk
xk+1 =xk+1(
xTk+1 M xk+1
)1/2 −→ φ1
Vector Interation에는 다음과 같은 방법들이 있다.
• Inverse Interation
• Forward Interation
• Ralyeigh Quotient Iteration
이상의 Vector Iteration방법을 사용하여 1개의 eigenpair를 구하고 행
렬을 deflate (shifting)하여 추가의 고유치를 구한다.
그러나이방법은고유치로의수렴이항상보장되어있지않으며수렴
속도 역시 느린 편이다.
- 165 -

Polynomial Iteration Method
고유치 문제는 다음 식을 푸는 문제이다.
K φ = λ M φ −→ (K− λ M) φ = 0
즉 다음의 다항식을 풀어야 한다.
p(λ) = det (K− λ M) = 0
즉, 다항식을 풀기위해 Newton iteration을 사용한다.
μi+1 = μi − p(μi)
p′(μi)
p(λ) = a0 + a1λ + a2λ2 + · · ·+ anλ
n
= b0(λ− λ1)(λ− λ2) · · · (λ− λn)
- 166 -

Polynomial Iteration에는 다음과 같은 방법이 있으며 각각의 특징은
다음과 같다.
• Explicit polynomial iteration
– 다항식을 전개하여 근을 구하기 위한 iteration을 행한다.
– 큰 시스템에는 부적절 하다.
∗ aj’s 를 구하는데 많은 양의 계산을 필요로 한다.
∗ 불안정한 process이므로 주의를 필요로 한다.
• Implicit polynomial iteration
–
p(μi) = det(K− μiM)
= detL D LT = Πdii
– 중근이 많지 않은 경우에는 정확하다.
– λ1, . . . 을 직접 구한다.
– Secant Iteration을 사용한다.
μi+1 = μi − p(μi)⎛⎝p(μi)− p(μi−1)
μi − μi−1
⎞⎠
– λ1 에 수렴한 다음에 다음 근을 위하여 shifting을 사용한다.
- 167 -

- 168 -

Sturm Sequence Methods
- 169 -
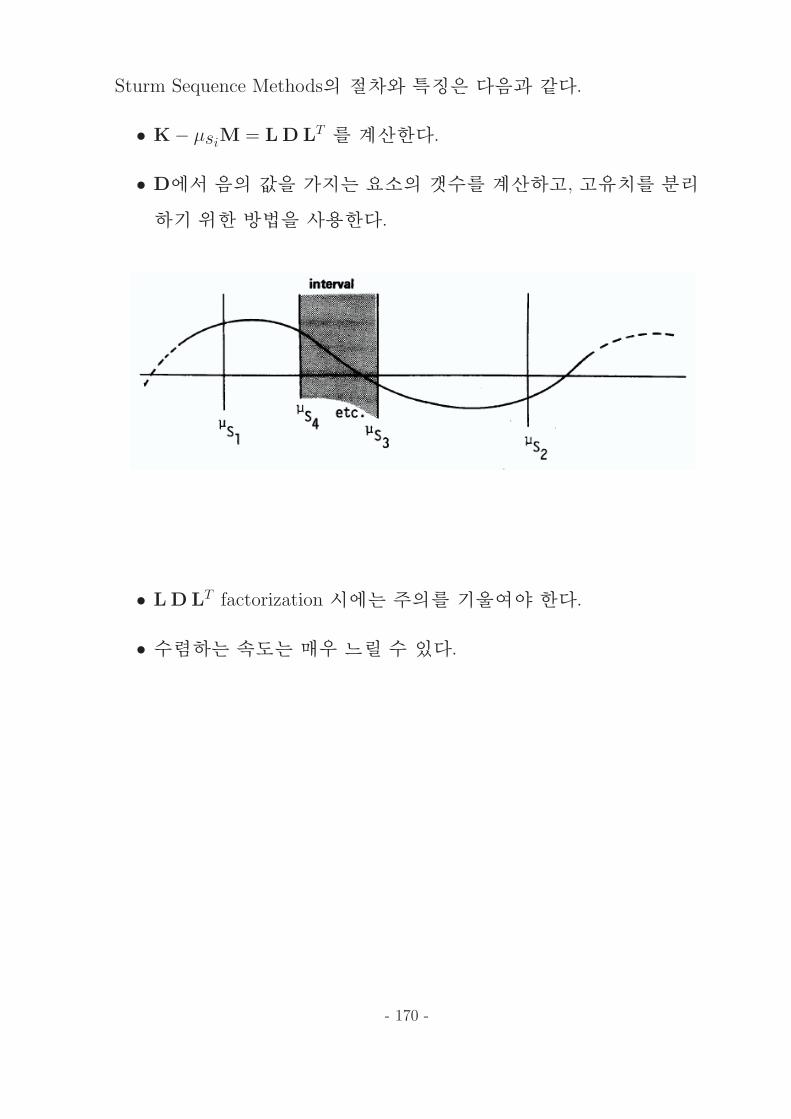
Sturm Sequence Methods의 절차와 특징은 다음과 같다.
• K− μsiM = L D LT 를 계산한다.
• D에서 음의 값을 가지는 요소의 갯수를 계산하고, 고유치를 분리
하기 위한 방법을 사용한다.
• L D LT factorization 시에는 주의를 기울여야 한다.
• 수렴하는 속도는 매우 느릴 수 있다.
- 170 -

Transformation Method
Transformation Method의 절차와 특징은 다음과 같다.
•
K φ = λ M φ →⎧⎪⎨⎪⎩
ΦT K Φ = Λ
ΦT M Φ = I
• Construct Φ iteratively:
Φ =[
φ1, · · · φn
]; Λ =
⎡⎢⎢⎢⎣
λ1. . .
λn
⎤⎥⎥⎥⎦
PTk · · ·PT
2 PT1 KP1P2 · · ·Pk → Λ
PTk · · ·PT
2 PT1 MP1P2 · · ·Pk → I
e.g. 일반화된 Jacobi method
• 모든 고유치들을 동시에 구한다.
• 큰 시스템의 경우에는 비 효율적이거나 해석이 불가능하다.
- 171 -

대형 시스템의 고유치 문제:
위의기본기술들을조합하여사용하는것이가장바람직하며다음과
같은 방법이 사용된다.
• 근에 가까운 값을 찾기 위해 행렬식을 검토한다.
• 고유 벡터와 고유치를 찾기 위해 vector iteration을 시행한다.
• Transformation Method를 사용하여 반복 벡터들을 직교화 한다.
• 요구되는 고유치가 계산되었는지를 Sturm sequence method로 확
인한다.
- 172 -

Determinant Search Method
Determinant Search의 방법의 처리 순서와 특징은 다음과 같다.
• λ1 에 가까운 값을 찾기 위해 다항식을 반복한다.
p(μi) = det(K− μiM)
= detL D LT = Πdii
μi+1 = μi − ηp(μi)
p(μi)− p(μi−1)
μi − μi−1
η 는 일반적으로 1.0 이다.
수렴이 느릴때에는 η 의 값을 2., 4., 8., 로 증가 시킨다.
λi 에 가까운 값을 구할 때에도 같은 과정이 적용된다.
(p(λ) is deflated of λ1, . . . , λi−1)
• Sturm sequence property 를 사용하여 μi+1의 값이 미지의 고유치
보다 큰지 검사한다.
- 173 -

• μi+1 의 값이 미지의 고유치보다 큰 경우에는, inverse iteration 을
사용하여 고유 벡터와 고유치를 구한다.
(K− μi+1M)xk+1 = M xk k = 1, 2, . . .
xk+1 =xk+1(
xTk+1 M xk+1
)1/2
ρ (xk+1) =xT
k+1 M xk
xTk+1 M xk+1
• 반복 벡터는 반드시 이전에 계산된 고유벡터의 사용에 의해 de-
flated되야 한다. (e.g Gram-Schmidt 직교화)
• 수렴하는 속도가 느리면, Rayleigh quotient iteration 을 사용한다.
• 장점: 실제로 필요한 고유치만을 계산하며 사전에 변환을 필요로
하지 않음.
• 단점: 많은 수의 Factorization을 필요로 함.
• Small banded system 에 대해서만 효과가 있다.: bandwidth 가 큰
계에 대해서는 보다 적은 수의 Factorization과 보다 많은 Vector
Iteration 을 수반하는 알고리즘이 필요하다.
- 174 -

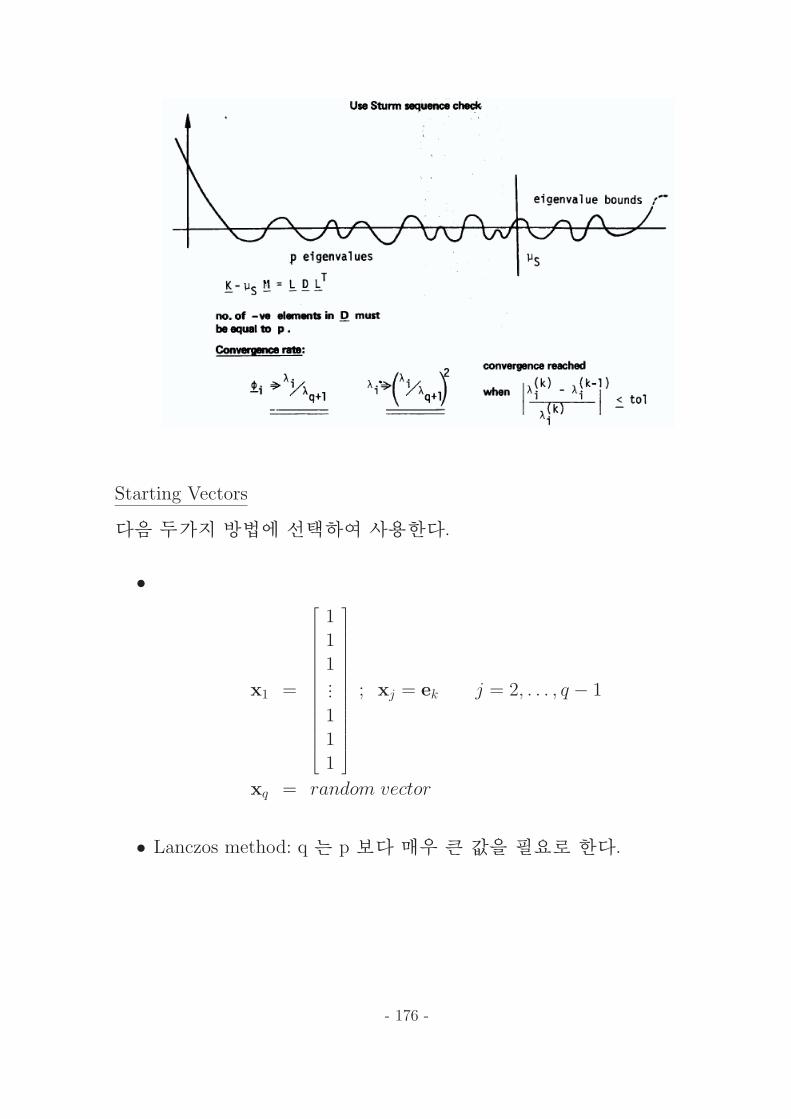
Subspace Iteration Method
가장 작은 p개의 고유치와 고유벡터가 요구될때, q 개의 벡터를 사용
하여 반복한다.
기본 수식
inverseiteration
{K Xk+1 = M Xk k = 1, 2, . . .
Kk+1 = XTk+1 K Xk+1
Mk+1 = XTk+1 M Xk+1
Kk+1 Qk+1 = Mk+1 Qk+1 Λk+1
Xk+1 = Xk+1 Qk+1
“Under conditions”은 다음과 같다.
Xk+1 → ; Λk+1 → Λ
Φ =[
φ1, . . . φq
]; Λ = diag(λi)
Condition
X1 에 의해 span 되는 starting subspace는 필요로 하는 least dominant
subspace 과 수직하지 않아야 한다.
- 175 -
Starting Vectors
다음 두가지 방법에 선택하여 사용한다.
•
x1 =
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
111...111
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
; xj = ek j = 2, . . . , q − 1
xq = random vector
• Lanczos method: q 는 p 보다 매우 큰 값을 필요로 한다.
- 176 -
고유쌍의 검사
• Sturm sequence checks
•
εi =
∣∣∣∣∣∣∣∣K φ(l+1)
i− λ
(l+1)i M φ(l+1)
i
∣∣∣∣∣∣∣∣2∣∣∣∣
∣∣∣∣K φ(l+1)i
∣∣∣∣∣∣∣∣2
고유쌍의 검사는 모든 풀이에서 매우 중요하다
- 177 -