روش عناصر محدود (برای دوره کارشناسی ارشد مکانیک سنگ)...
DESCRIPTION
روش عناصر محدود (برای دوره کارشناسی ارشد مکانیک سنگ) Finite Element Procedures. کریم عابدی. فصل دوم مباني رياضي روش عناصر محدود. 1- مقدمه. 1- مدل پارامتر متمركز ( Lumped parameter model ) يا مدل گسسته سيستم ( Discrete system model ) 2- مدل مبتني بر مكانيك محيط پيوسته - PowerPoint PPT PresentationTRANSCRIPT


روش عناصر محدود)برای دوره کارشناسی ارشد مکانیک سنگ(
Finite Element Procedures
روش عناصر محدود)برای دوره کارشناسی ارشد مکانیک سنگ(
Finite Element Procedures
کریم عابدیکریم عابدی

فصل دوم
مباني رياضي روش عناصر محدود
مقدمه -1
مدل هاي رياضي:
(Lumped parameter model- مدل پارامتر متمركز )1
(Discrete system model يا مدل گسسته سيستم )
- مدل مبتني بر مكانيك محيط پيوسته 2
(Continuum mechanics-based model )
(Continues systemيا مدل پيوسته سيستم )
در يك مدل رياضي پارامتر متمركز يا گسسته سيستم: متغير حالت )پاسخ واقعي سيستم مستقيما به وسيله حل تعداد محدوديState
Variable ) .)توصيف مي گردد )بحثی در مورد متغیر حالت
براي يافتن متغيرهاي حالت مجهول، مجموعه اي از معادالت جبري بدست مي در يك مدل رياضي پيوسته سيستم :آيند.
.پاسخ واقعي سيستم به وسيله بينهايت متغير حالت توصيف مي گردد
،بريFادالت جFه از معFك مجموعFاي يFه جFول، بFالت مجهFاي حFافتن متغيرهFبراي يمعادالت ديفرانسيل بر پاسخ سيستم حاكم مي باشد.
- روش هاي حل مدل هاي رياضي 2براي حل مدل هاي رياضي گسسته سيستم دو روش اساسي مورد گسسته سيستم:
:استفاده قرار مي گيرد (Direct method- روش مستقيم )
Variational- روش وردشي )method)
در روش مستقيم انجام مراحل زير ضروري است:
آل سFازي سيسFتم 1 ايFده -(System idealization) : هFب واقعي سيسFتم عنوان مجموعه همبسته عناصر محدود ايده آل سازي مي شود.
شFرايط تعFادل هFر عنصFر بFر : (Equilibrium of elements)- تعFادل عناصFر2حسب متغيرهاي حالت ايجاد مي شوند.
اتصFال متقابFل : (Element assemblage)- سFوار كFردن عناصFر 3 شFرايط عناصFر مFورد اسFتفاده قFرار مي گيرنFد تFا مجموعFه اي از معFادالت همزمFان بFر حسFب
متغيرهاي حالت مجهول ايجاد شود.
معFادالت همزمFان جهت پيFدا كFردن متغيرهFاي حFالت حFل مي : - محاسFبه پاسFخ4شوند و با استفاده از شرايط تعادل عناصر پاسخ هر عنصري محاسبه مي گردد.
الف( روش مستقیم

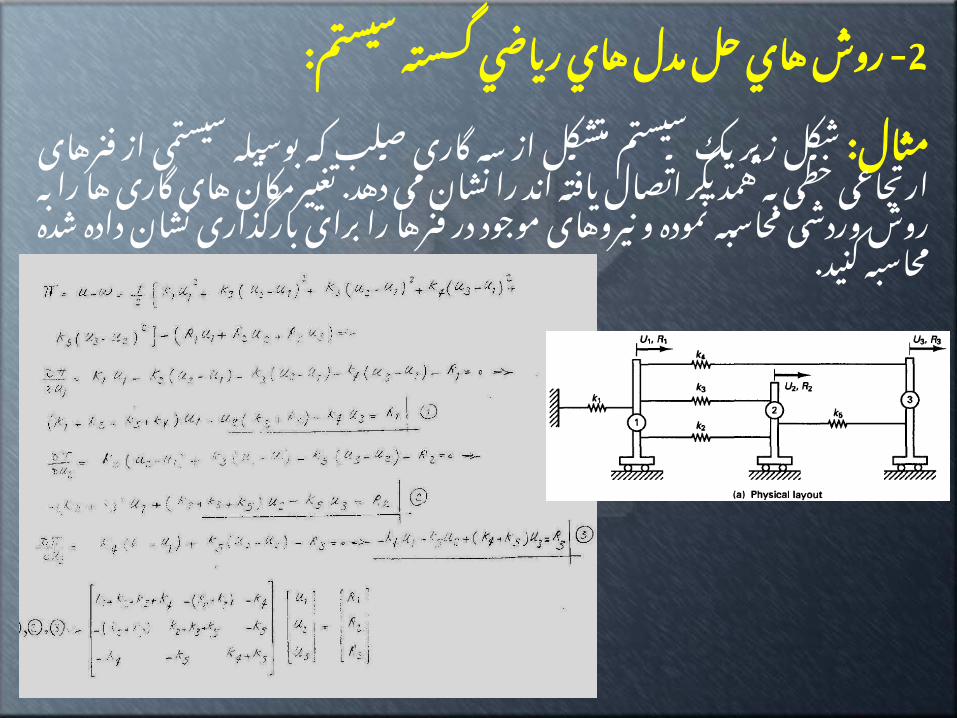
از مث>ال: يFك سيسFتم متشFكل زيFر افقي 3شFكل را در صFفحه گFاري صFلب نشFان مي دهFد كFه بFه وسFيله سيسFتمي از فنرهFاي ارتجFاعي خطي بFه همFديگر اتصFال يافتFه انFد. تغييرمكFان هFاي گFاري هFا را محاسFبه نمFوده و نيروهFاي موجFود در فنرهFا را
براي بارگذاري نشان داده شده محاسبه كنيد.
، U1 انجFام مي دهيم. تغييرمكFان هFاي 4 تFا 1تحليFل را بFا دنبFال نمFودن مراحFل حل:U2، U3 ابFد انتخFخص مي نماينFتم را مشFخ سيسFه پاسFالت كFاي حFوان متغيرهFه عنFرا ب
مي كFنيم. تغييرمكFان هFاي مFذكور از مFوقعيت اوليFه گFاري هFا انFدازه گرفتFه مي شFوند كFه در آن فنرهFا در حFالت آزاد و بFدون كشFش مي باشFند. عناصFر انفFرادي فFنري و
شرايط تعادل آنها در شكل هاي بعدي نشان داده مي شوند.
آرايش فيزيكي
- روش هاي حل مدل هاي رياضي 2گسسته سيستم:

روابط تعادل عناصر
براي ايجFاد معFادالت حFاكم بFه ازاي متغيرهFاي حFالت، شFرايط اتصFال متقابFل عناصFر مFورد اسFتفاده قFرار مي گيرنFد كFه متنFاظر بFا تعFادل ايسFتايي هFر يFك از سFه گFاري مي
باشند:
- روش هاي حل مدل هاي رياضي 2گسسته سيستم:
Fi(j) نیرویی که به فنر =j
Ui در اثر تغییرمکان وارد می شود.

انتهFايي عنصFري نيروهFاي تFوان Fiحال مي (j) ، j =1, 2,…, 5 و i =1, 2, 3 اFب را
اسFت، شFده داده نشFان )ب( شFكل در كFه عناصFر تعFادل شFرايط از اسFتفاده مي تFوان U1 ،U2 ، U3جايگFذاري نمFود. در اين جFا متنFاظر بFا مولفFه هFاي تغييرمكFان
نوشت:1براي عنصر شماره
يا براي عنصر شماره 2:
- روش هاي حل مدل هاي رياضي 2گسسته سيستم:
به همین ترتیب برای سایر عناصر این مرحله را انجام می دهیم.

يFادآوري شFود كFه مFاتريس ضFريب بايFد نكتFه از Kاين بFا اسFتفاده تFوان را مي رابطه زير بدست آورد:
ماتريس هاي سختي عنصري اند. به فرآيند جمع براي يافتن ماتريس K(i)كه در آن سختي كل سازه در رابطه باال با استفاده از جمع مستقيم ماتريس هاي سختي
اطالق مي شود. روش مستقيم سختیعناصر،
- روش هاي حل مدل هاي رياضي 2گسسته سيستم:
اتصFال بنFابراين شFرايط بFFه عناصFFر متقابFFل صFورت رو بFه رو در مي
آيد:
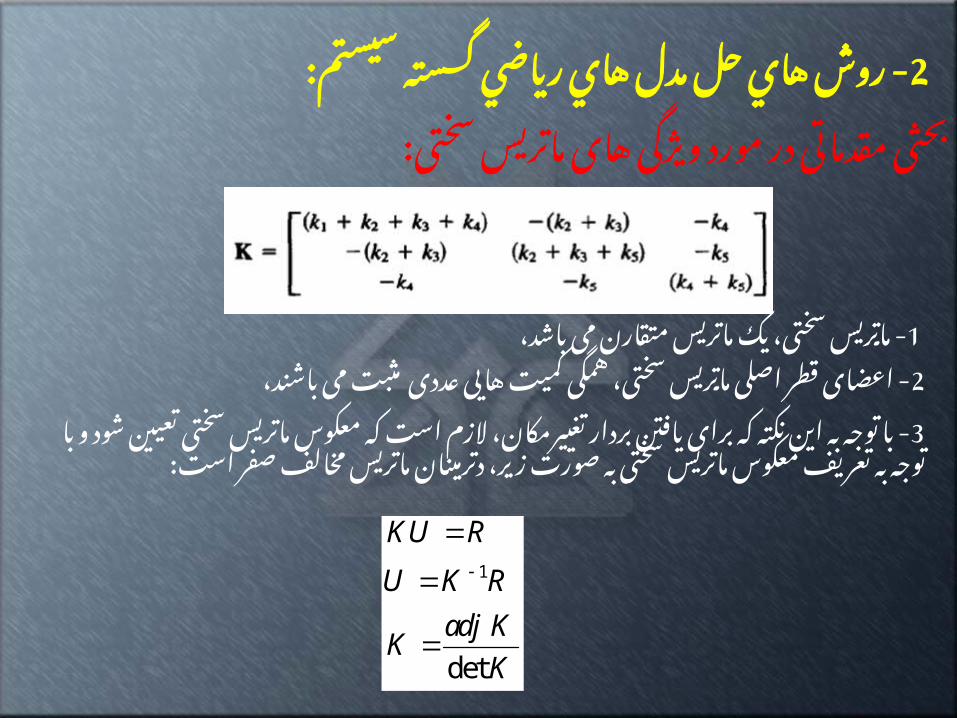
بحثی مقدماتی در مورد ویژگی های ماتریس سختی:
- روش هاي حل مدل هاي رياضي 2گسسته سيستم:
- ماتریس سختی، یک ماتریس متقارن می باشد،1
- اعضFای قطFر اصFلی مFاتریس سFختی، همگی کمیت هFایی عFددی مثبت می 2باشند،
- بFا توجFه بFه این نکتFه کFه بFرای یFافتن بFردار تغییرمکFان، الزم اسFت کFه معکFوس 3بFه بFه تعریFف معکFوس مFاتریس سFختی بFا توجFه تعFیین شFود و مFاتریس سFختی
صورت زیر، دترمینان ماتریس مخالف صفر است:
1
det
KU R
U K R
adj KK
K
Variational)ب( روش وردشی method)
- معFادالت تعFادل حFاکم بFر یFک مFدل ریاضFی گسسFته سیسFتم را می تFوان بFر حسFب متغیرهFای حFالت بFا اسFتفاده از فرمFول بنFدی اکسFترمم
یا وردشی بدست آورد.
یک مسFاله اکسFترموم، شFامل تعFیین مجموعFه ای از مقFادیر متغیرهFای ( Functional) اسFت کFه بFه ازای آنهFا یFک تابعFکi=1,…,n و UiحFالت
مFاکزیمم، میFنیمم یFا یFک نقطFه زیFنی داده شFده (Saddle point).است
در تحلیFل سFازه هFا هنگFامی کFه تغییرمکFان هFای تعمیم یافتFه بFه عنFوان متغیرهFای حFالت مFورد اسFتفاده قFرار می گیرنFد، پتانسFیل کلی
) یا تابعک انرژی پتانسیل کلی ( می باشد، یعنی:
WU
),...,,( 21 nUUU
U =انرژی کرنشی سیستم
W = پتانسیل کلی بارها
- روش هاي حل مدل هاي رياضي 2گسسته سيستم:
در فرمول بندی اکسترموم یا وردشی مسائل سازه ای از اصل - زیر استفاده می شود:( Axiom)موضوع
موض>وع: تابعFک اص>ل مشFتق بFودن صFفر مسFاوی نسFبت بFه (Total Potential Energy)انFرژی پتانسFیل کلی
یFا متغیرهFای حFالت(، شFرط الزم و یFک متغFیر حFالت ) کافی برای تعادل یک سیستم سازه ای است.
niU i
,...,2,1,0
معادالت تعادل بر حسب متغیرهای حالت بدست می
آیند.
(Stationary requirement) شرط مانابودن
- روش هاي حل مدل هاي رياضي 2گسسته سيستم:

2
2
1, ,
21
2
0
U W U K W R
K R
K R
R K
معادله تعادل
را در نظFر بگیریFد و بFا R و بFار وارده K یFک فFنر سFاده بFا سFختی مثFال:استفاده از روش وردشی معادله تعادل را بدست آورید.
ایجFاد بFرای وردشFی روش از اسFتفاده کFه حسFن اسFت ذکFر بFه الزم بFه طFور بFودن بFا اسFتفاده از شFرط مانFا تعFادل آن اسFت کFه معFادالت
خودکار شرایط اتصال متقابل عناصر تامین می شود.
- روش هاي حل مدل هاي رياضي 2گسسته سيستم:
- روش هاي حل مدل هاي رياضي 2گسسته سيستم:
شFکل زیFر یFک سیسFتم متشFکل از سFه گFاری صFلب کFه بوسFیله مث>ال:انFد را سیسFتمی از فنرهFای ارتجFاعی خطی بFه همFدیگر اتصFال یافتFه نشFان می دهFد. تغییرمکFان هFای گFاری هFا را بFه روش وردشFی محاسFبه نمFوده و نیروهFای موجFود در فنرهFا را بFرای بارگFذاری نشFان داده شFده
محاسبه کنید.

- روش های حل مدل های ریاضی 3هماننFد حFالت تحلیFل مFدل هFای گسسFته دو روش مختلFف را می تFوان پیوسته سیستم:
برای ایجاد معادالت دیفرانسیل حاکم بر سیستم دنبال نمود:
روش مستقیم )فرمول بندی دیفرانسیلی(
روش وردشی
الف( روش مستقیم )فرمول بندی دیفرانسیلی(
در فرمFول بنFدی دیفرانسFیلی، شFرایط تعFادل و روابFط مشخصFه عناصFر دیفرانسیلی نمونه را بر حسب متغیرهای حالت ایجاد می کنیم.
مالحظFات مFذکور منجFر بFه یFک دسFتگاه معFادالت دیفرانسFیل بFر حسFب متغیرهای حالت می شوند.
بFا معFادالت دیفرانسFیل کمکی تکمیFل بایFد این معFادالت در حFالت کلی متغیرهFای بFر را مناسFبی قیFدهای کمکی دیفرانسFیل معFادالت شFوند.
حالت اعمال می کنند تا اینکه تمامی شرایط سازگاری ارضا شوند.
سرانجام بFرای تکمیFل فرمFول بنFدی مسFاله، تمFامی شFرایط مFرزی ) و در یک تحلیل دینامیکی، شرایط اولیه( نیز بیان می شوند.
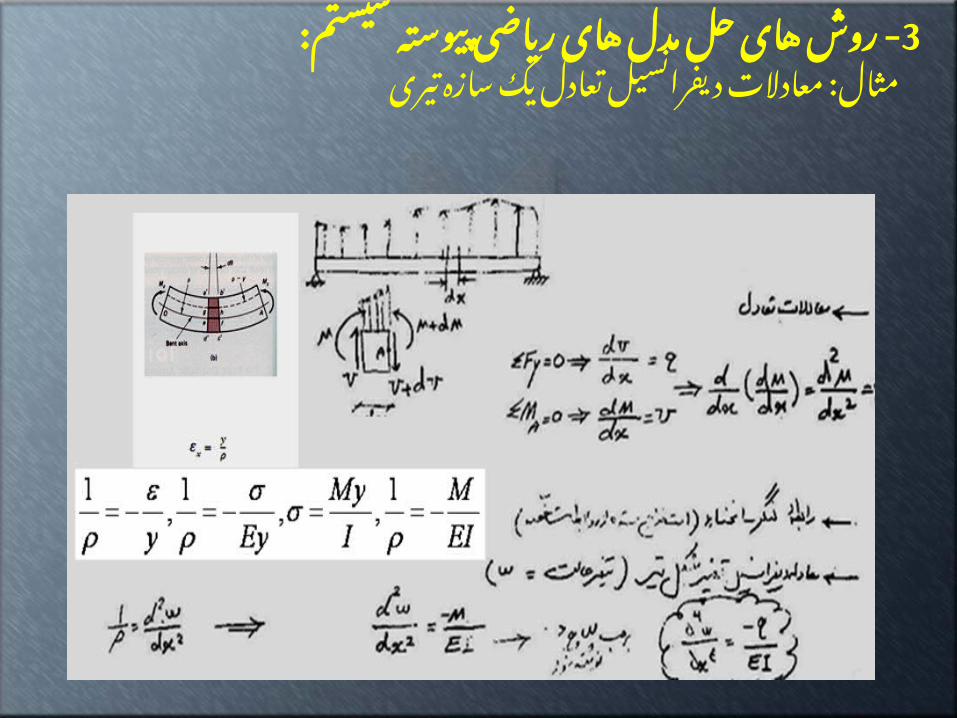
مثال: معادالت دیفرانسیل تعادل یک سازه تیری
- روش های حل مدل های ریاضی 3پیوسته سیستم:

بعFدی تحت اثFر بFار گسFترده معادلFه دیفرانسFیل حFاکم بFر میلFه یFکمثFال:f B(x) یک بار متمرکز وR.در سمت راست را بدست آورید
- روش های حل مدل های ریاضی 3پیوسته سیستم:
مFFFFFرزی شرط مFFFFFرزی تغییرمکانی شرط
نیرویی

ای را کFه در شFکل زیFر معFادالت دیفرانسFیل حFاکم بFر مسFاله میلFهمثFال:ابتFدا در حFالت سFکون نشFان داده شFده اسFت بدسFت آوریFد. میلFه در
ناگهان بر انتهای آن وارد می شود. R(t)بوده و بار
با استفاده از اصل داالمبرت داریم:
)الف(
- روش های حل مدل های ریاضی 3پیوسته سیستم:

(ب)رابطه مشخصه
با ترکیب )الف( و )ب( رابطه روبرو حاصل می گردد:
Boundary)شرایط مرزی condition)
(Initial condition)شرایط اولیه
تغییر نیروییمکانی
(Boundary value problems)( مسائل مقدار مرزی 1
تقاتFمش )یFا مجهFول حFالت متغیرهFای مسFائل، گونFه این در معمولی آنها( در مرز داده می شوند.
ود درFات موجFه اطالعFتگی بFومی داخلی بسFه عمFک نقطFجواب در یتمامی نقاط مرزی دارد.
اFالت پایFائل حFمس(Steady state) وعFتاتیکی از این نFائل اسFا مسFی هستند.
- روش های حل مدل های ریاضی 3پیوسته سیستم:
نFوع دو بFه کFه اسFت الزم اینجFا در مساله اشاره شود:
(Initial value problems)( مسائل مقدار اولیه 2
رح میFتقل مطFیر مسFک متغFوان یFه عنFان بFائل، زمFه مسFدر این گونشود.
.جواب این مساله به شرایط اولیه بستگی دارد هFب توانFد می داخلی نقطFه یFک در جFواب مسFائل، گونFه این در
از میFدان اولیFه در بخشFی از مFرز و شFرایط شFرایط مFرزی بخشFی داخلی بستگی داشته باشد.
ارFالت انتشFائل حFمس(Propagation) وعFامیکی از این نFائل دینFا مسFی مسائل هستند.

آن بنFدی وردشFی همFان گونFه کFه عنFوان شFد، اسFاس روش فرمFول است که پتانسیل کلی
بFودن بFا اسFتفاده از شFرط مانFا سیسFتم محاسFبه می شFود و (stationary ) رار دادهFفر قFالت صFای حFه متغیرهFبت بFتق آن نسFمش ،
معFادالت دسFتگاه یFا و دیفرانسFیل معادلFه نتیجFه در و شFود می دیفرانسیل بدست می آیند.
روش وردشFی مکFانیزم مFوثر و نیرومنFدی را بFرای تحلیFل سیسFتم هFای پیوسته فراهم می نماید.
علت اصFلی مFوثر و نیرومنFد بFودن روش وردشFی، در چگFونگی ایجFاد شFرایط مFرزی و نحFوه در نظFر گFرفتن این شFرایط در هنگFام اسFتفاده
از روش وردشی نهفته است.
اطالق می شFود. (Functional)به پتانسFیل کلی تابعFک مسFاله mفFرض کنیFد کFه در تابعFک بFاالترین مشFتق یFک متغFیر حFالت از مرتبFه
می نامیم.Cm-1است، در این صورت مساله مذکور را مساله وردشی
- روش های حل مدل های ریاضی 3پیوسته سیستم:
ب( روش وردشFی )یFا فرمFول بنFدی وردشی(
شرایط مرزی بر دو نوع هستند:
) (Essential boundary conditionشرایط مرزی اساسی )هندسی(الف(
تغییرمکFان هFا و دوران هFای مFرزی از پیش تعFیین شFده )دارای مشFتقات (m-1حداکثر با مرتبه
(Natural boundary conditions)شرایط مرزی طبیعی )نیرویی( ب(
از مشFتقات )دارای شFده تعFیین پیش از مFرزی لنگرهFای و نیروهFا (2m-1 تا mمرتبه
- روش های حل مدل های ریاضی 3پیوسته سیستم:

معادلFه دیفرانسFیل حFاکم بFر مسFاله میلFه ای را کFه در شFکل زیFر مثFال:نشان داده شده است، با استفاده از روش وردشی بدست آورید.
- روش های حل مدل های ریاضی 3پیوسته سیستم:
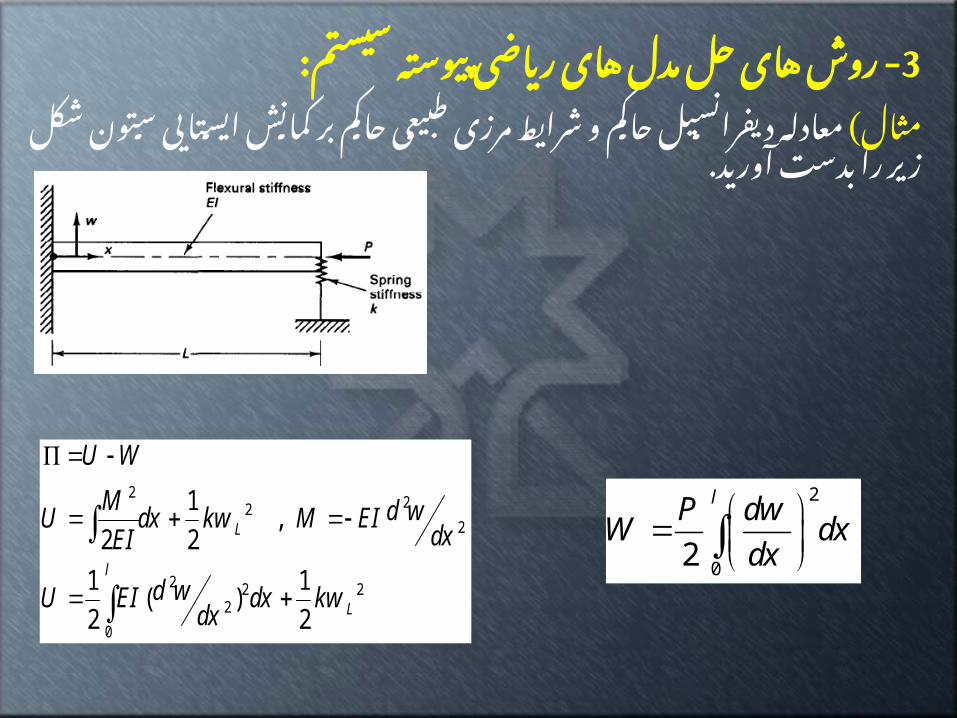
بFر مثFال( حFاکم طFبیعی مFرزی شFرایط و حFاکم دیفرانسFیل معادلFه کمانش ایستایی ستون شکل زیر را بدست آورید.
222
2
2 2 22
0
1,
2 2
1 1( )
2 2
L
l
L
U W
M d wU dx kw M EIdxEI
d wU EI dx kwdx
2
02
lP dwW dx
dx
- روش های حل مدل های ریاضی 3پیوسته سیستم:

m=2تابعک انرژی پتانسیل کلی , C1
شرط مFرزی اساسFی یFا m-1=1دارای حداکثر مشتق از مرتبه هندسی
اکنFون شFرط مانFا بFودن را مFورد اسFتفاده قرار می دهیم:
- روش های حل مدل های ریاضی 3پیوسته سیستم:
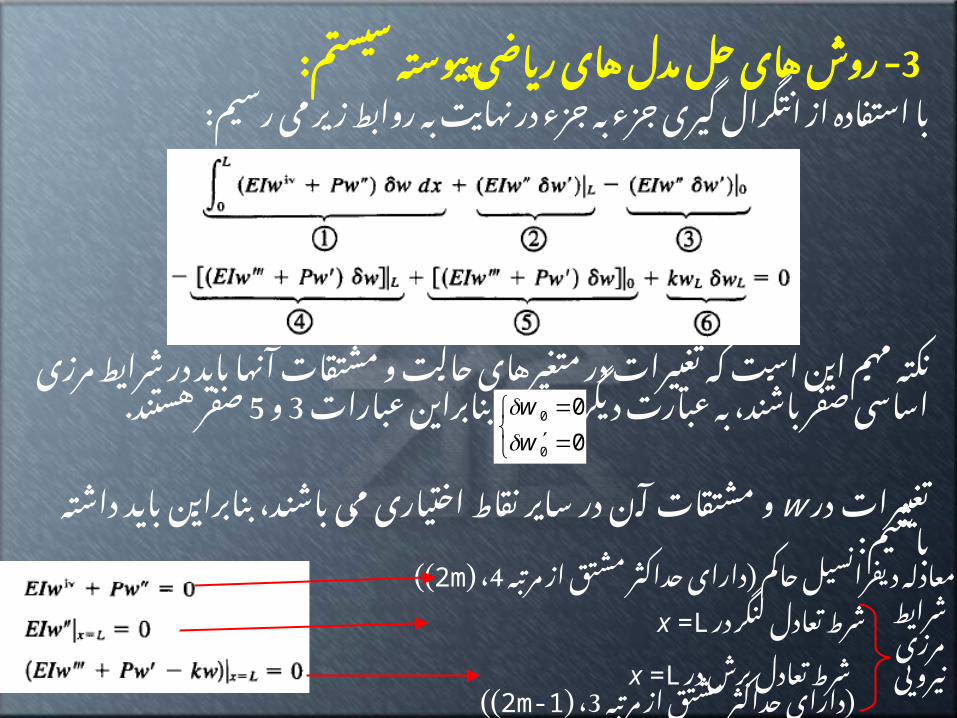
نکتFه مهم این اسFت کFه تغیFیرات در متغیرهFای حFالت و مشFتقات آنهFا بایFد در شFرایط مFرزی اساسFی صFفر باشFند، بFه عبFارت دیگFر
صفر هستند.5 و 3 ، بنابراین عبارات 0
0
0
0
w
w
در باشFند، wتغیFیرات اختیFاری می نقFاط در سFایر آن و مشFتقات بنابراین باید داشته باشیم:
معادلFه دیفرانسFیل حFاکم )دارای حFداکثر مشFتق از x =Lشرط تعادل لنگر در ((2m، )4مرتبه
در برش تعادل xشرط =L
شرایط مرزی نیرویی
- روش های حل مدل های ریاضی 3با اسFتفاده از انتگFرال گFیری جFزء بFه جFزء در نهFایت بFه روابFط زیFر پیوسته سیستم:
می رسیم:
((2m-1، )3)دارای حداکثر مشتق از مرتبه

در هر دو مثال یک نکته بارز به چشم می خورد:
بFه طFور )نFیرویی( مFرزی طFبیعی کFه شFرایط اسFت این نکتFه مهم ضFمنی در وارد می شFوند، در حFالی کFه شFرایط مFرزی اساسFی
)هندسی( به طور جداگانه بیان می گردند.
ایجFاد 1 بFرای را ای سFاده نسFبتا روش توانFد می وردشFی روش -معFادالت حFاکم بFر سیسFتم فFراهم نمایFد. سFهولت مFذکور در اسFتفاده از یFک اصFل وردشFی عمFدتا در نتیجFه این واقعیت اسFت کFه در فرمFول بنFدی وردشFی بFه جFای اینکFه کمیت هFای بFرداری نظFیر )نیروهFا، تغیFیر مکFان هFا و ...( اسFتفاده شFوند، کمیت هFای اسFکالر )نظFیر انFرژی هFا ،
پتانسیل ها و ...( در نظر گرفته می شوند.
- یFک روش وردشFی می توانFد بFه طFور مسFتقیم منجFر بFه معFادالت 2حاکم بر سیستم و شرایط مرزی شود.
- روش های حل مدل های ریاضی 3پیوسته سیستم:
بنFدی وردشFی بFه نکFات زیFر در فرمFول نهFایت در -روش وردشFی در فهم عمیFق مسFاله بFه طFور مFوثری کمFک می کنFد 3می توان اشاره نمود:
و نیز کنترل مستقلی را در فرمول بندی مساله فراهم می کند.
-اگFر تحلیلگFر بFه جFای فرمFول بنFدی دیفرانسFیلی مسFاله در روی 4فرمFول بنFدی وردشFی عمFل کنFد، در این صFورت بFرای راه حFل هFای عFددی تقریFبی، در حFاالت زیFادی می توانFد رده هFای بیشFتری از توابFع آزمFون را بFه کFار گFیرد، بFه عنFوان مثFال الزم نیسFت کFه توابFع آزمFون شFرایط مFرزی طFبیعی را ارضFا نمایFد، زیFرا این شFرایط مFرزی بFه طFور
ضمنی درتابعک در نظر گرفته شده اند.

در حل معادالت Ritz( روش 4دیفرانسیل
معFادالت Ritzروش - تقریFبی حFل بFرای کFه اسFت عFددی روش یFک دیفرانسیل بکار می رود.
)نFه روی Ritzروش - پتانسFیل کلی عمFل می کنFد انFرژی تابعFک روی معادله دیفرانسیل مساله(.
آن اسFت کFه جFواب مسFاله بFه صFورت تFابع آزمFون زیFر Ritzگام اساسFی در روش - :(Trial function)است
ai ضرایب مجهول =Ritz
fi توابع = Ritz را در جایگFذاری می کFنیم و بFا در این روش توابFع آزمFون استفاده از شرط مانا بودن
، n ولFای مجهFب پارامترهFر حسFبری را بFان جFه همزمFمعادل ai به صورت زیر بدست می آوریم:
niai
,...,3,2,1,0
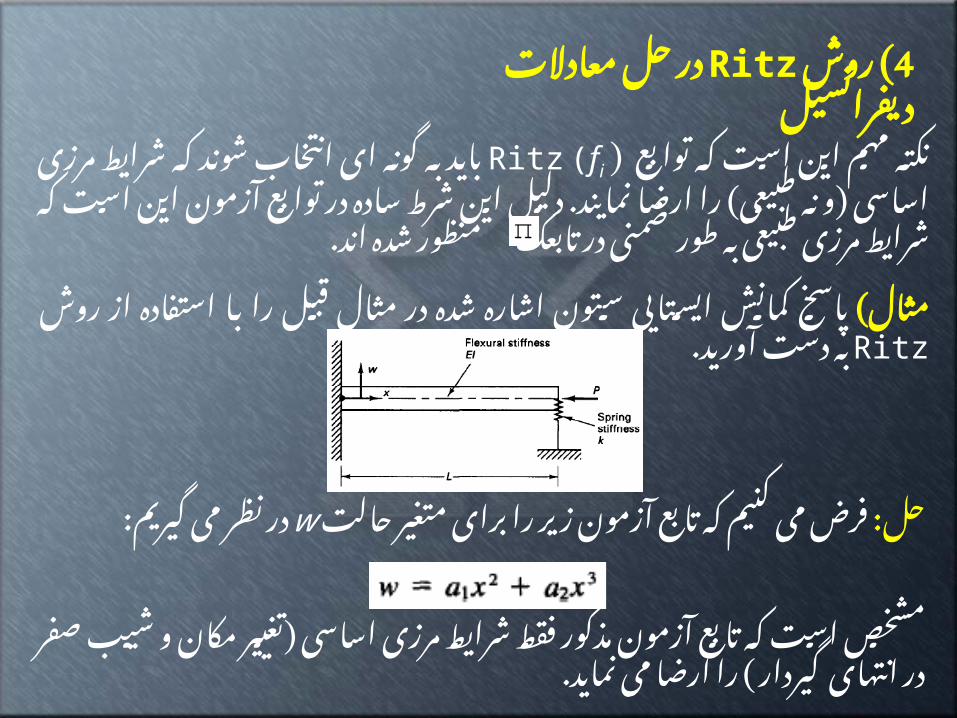
بایFد بFه گونFه ای انتخFاب شFوند کFه Ritz (fi )نکتFه مهم این اسFت کFه توابFع شFرایط مFرزی اساسFی )و نFه طFبیعی( را ارضFا نماینFد. دلیFل این شFرط سFاده در توابFع آزمFون این اسFت کFه شFرایط مFرزی طFبیعی بFه طFور
ضمنی در تابعک منظور شده اند. پاسFخ کمFانش ایسFتایی سFتون اشFاره شFده در مثFال قبFل را بFا مث>ال(
به دست آورید.Ritzاستفاده از روش
در w فFرض می کFنیم کFه تFابع آزمFون زیFر را بFرای متغFیر حFالت حل:نظر می گیریم:
تFابع آزمFون مFذکور فقFط شFرایط مFرزی اساسFی مشFخص اسFت کFه )تغییر مکان و شیب صفر در انتهای گیردار ( را ارضا می نماید.
در حل معادالت Ritz( روش 4دیفرانسیل

در تابعک انرژی پتانسیل کلی ، رابطه زیر wبا جایگذاری حاصل می شود:
( a2 و a1یک دستگاه معادالت جبری )بر حسب بدست می آید:
را نتیجه می دهد. کوچک ترین Pحل این ویژه مساله دو مقدار برای جواب تقریبی کمترین بار کمانش سازه را بدست می دهد.Pمقدار
در حل معادالت Ritz( روش 4دیفرانسیل

، در واقع Ritz (fi )توجه شود که در روش عناصر محدود، توابع هستند که در ماتریس ( Shape functions)همان توابع شکل
(Displacement interpolation matrix)درون یابی تغییر مکان جای می گیرند.
H) ماتریس تابع شکل ،(Shape function) یا ماتریس درون یابی تغییر مکان(
در حل معادالت Ritz( روش 4دیفرانسیل
توجه شود که در روش عناصر محدود تابع آزمون یا متغیرهای حالت، همان توابع تغییر مکان تعمیم یافته درون هر عنصر می
. u(m))باشند)
، در Ritz (ai)توجه شود که در روش عناصر محدود، ضرایب مجهول واقع همان تغییرمکان های تعمیم یافته مجهول گرهی هستند، که در
Uجای می گیرند .

در حل معادالت Galerkin( روش 5دیفرانسیل
یFک روش عFددی اسFت کFه بFرای حFل تقریFبی معFادالت Galerkin- روش دیفرانسFیل بکFار می رود. این روش روی معادلFه دیفرانسFیل عمFل می
کند نه روی تابعک انرژی پتانسیل کلی.
را بFا اسFتفاده از فرمFول (Steady state)- تحلیFل یFک مسFاله حFالت پایFا بندی دیفرانسیلی زیر در نظر می گیریم:
L2m یلیFر دیفرانسFعملگ = (Differential operator) تقFه مشFاالترین مرتبFب( است(2mدر آن
(State variable) = متغیر حالت
r تابع نیرویی =(Force function)

مثال معادلFه دیفرانسFیل حFاکم بFر میلFه یFک بعFدی را تحت اثFر بFار گسFترده f B(x) و یک بار متمرکزR:در سمت راست آن را در نظر بگیرید
2
2( )Bu
EA f xx
این مساله L2mبنابراین عملگر دیفرانسیلی 2عبارت است از:
2 2
( )
m
B
L EAx
u
r f x
در حل معادالت Galerkin( روش 5دیفرانسیل

روش -Galerkin الهFمس بFر حFاکم دیفرانسFیل معادلFه روی مسFتقیما عمل می کند) نه روی تابعک مساله(.
- دراین روش نیز جواب مساله را به صورت زیر فرض می کنیم:
باید به گونه ای انتخاب شوند که هم شرایط fi مشخص است که توابعمرزی اساسی و هم شرایط مرزی طبیعی را تامین نمایند ) چون
مستقیما روی معادله دیفرانسیل حاکم بر مساله Galerkinروش عمل می کند نه روی تابعک(.
مساله مورد نظر را به صورت زیر تعیین می ( Residual)باقیماندهکنیم:
در حل معادالت Galerkin( روش 5دیفرانسیل

کامFل جFواب ازای بFه -(Exact Solution) فرFص مFذکور باقیمانFده ،(R=0 )است
یFک تقFریب مطلFوب بFه جFواب کامFل می توانFد بFه طFور ضFمنی داللت - در تمام نقاط میدان حل، باید مینیمم باشد. Rبر این نکته نماید که
هFای - الگFوریتم دار، وزن باقیمانFده متنFوع هFای روش از یFک هر ارائه می دهند.Rمختلفی را برای مینیمم سازی
روش - جملFه از ( دار وزن باقیمانFده متنFوع هFای روش تفFاوت Galerkin اتFمربع کمFترین روش ،(Least square method) روش ،
مکFFان(Sub-domain)زیرمیFFدان هم روش ،( Collocation) در ) بFه کFار می aiمعیارهFایی نهفتFه اسFت کFه آن روش هFا بFرای محاسFبه
مینیمم شود. Rبرند به گونه ای که معادله زیر n از aiپارامترهای ، R با مینیمم سازی Galerkinدر روش
تعیین می شوند: میدان جواب Dکه در آن
است.
در حل معادالت Galerkin( روش 5دیفرانسیل
یک دستگاه معادالت خطی بر حسب Galerkinبنابراین در روش ایجاد می شود.aiپارامترهای

روی تابعFک عمFل می نمFاییم، در حFالی کFه در Ritz- در روش 1می Galerkinروش عمFل مسFاله بFر حFاکم دیفرانسFیل معادلFه روی نماییم.
در روش 2 -Ritz دFبای آزمFون توابFع m ونFند چFباش پFذیر بFار مشFتق باالترین مرتبه مشتق در
2m توابFع آزمFون بایFد Galerkin اسFت، در حFالی کFه در روش mبرابFر بFا معادلFه در مشFتق مرتبFه بFاالترین زیFرا باشFند، پFذیر مشFتق بFار
(. Ritz است )دلیل اول برتری روش 2mدیفرانسیل از مرتبه
روش 3 در -Ritz را اساسFی مFرزی تنهFا شFرایط بایFد آزمFون توابFع توابFع آزمFون بایFد تمFامی GalerkinتFامین نماینFد، در حFالی کFه در روش
برتFری دوم )دلیFل نماینFد ارضFا را و طFبیعی اساسFی مFرزی شFرایط (. Ritzروش
در حل معادالت Galerkin( روش 5دیفرانسیل
روش روش RitzمقایسFFه و Galerkin

Principle of virtual)اصل تغییر مکان های مجازی (6Displacements)و رابطه آن با روش وردشی
کرنش ها عبارتند از:
تنش های متناظر با کرنش ها عبارتند از:
- یFک جسFم سFه بعFدی عمFومی را در نظFر بگیریFد. جسFم در یFک دسFتگاه قرار گرفته است.X, Y, Zمختصات ثابت
دارای Su- اگFر ناحیFه سFطحی جسFم را در نظFر بگFیریم، جسFم در سFطح می باشFد. تکیFه گFاه هFای بFا تغیFیر مکFان هFای از پیش تعFیین شFده
، (Surface Tractions) تحت اثFر نیروهFای سFطحی Sfدر ناحیFه سFطحی نیروهFای اثFر تحت همچFنین جسFم اسFت. ناحیFه سFطحی( )نیروهFای
خFارجی بارهFای f B (Body forces)حجمی و حجم( واحFد )نیروهFای Rcمتمرکز
i .می باشند
USUfSf

تعریف اصل کار مجازی تعادل جسم ایجاب می کند که به ازای تغییر مکان های مجازی
کوچک سازگار که به جسم در حال تعادل اعمال می شوند )به گونه ای که شرایط مرزی اساسی را تامین و ارضا نمایند(، کل کار مجازی
داخلی مساوی با کل کار مجازی خارجی باشد.
Principle of virtual)اصل تغییر مکان های مجازی (6Displacements)و رابطه آن با روش وردشی

اصل وردشی
اعمال شرط مانا بودن تابعک انرژی پتانسیل کلی
با توجه به اينکه کرنش ها ی مجازی اختیاری می باشند، لذا می توان فرض کرد:
تغييرمکان های مجازی کرنش های مجازی
نيرو های حقيقی تنش های حقيقی
Principle of virtual)اصل تغییر مکان های مجازی (6Displacements)و رابطه آن با روش وردشی
نتیجه گیری مهم
بنابر این اصل تغییر مکان های
مجازی معادل مانا بودن تابعک
انرژی پتانسیل
کلی سیستم
می باشد.
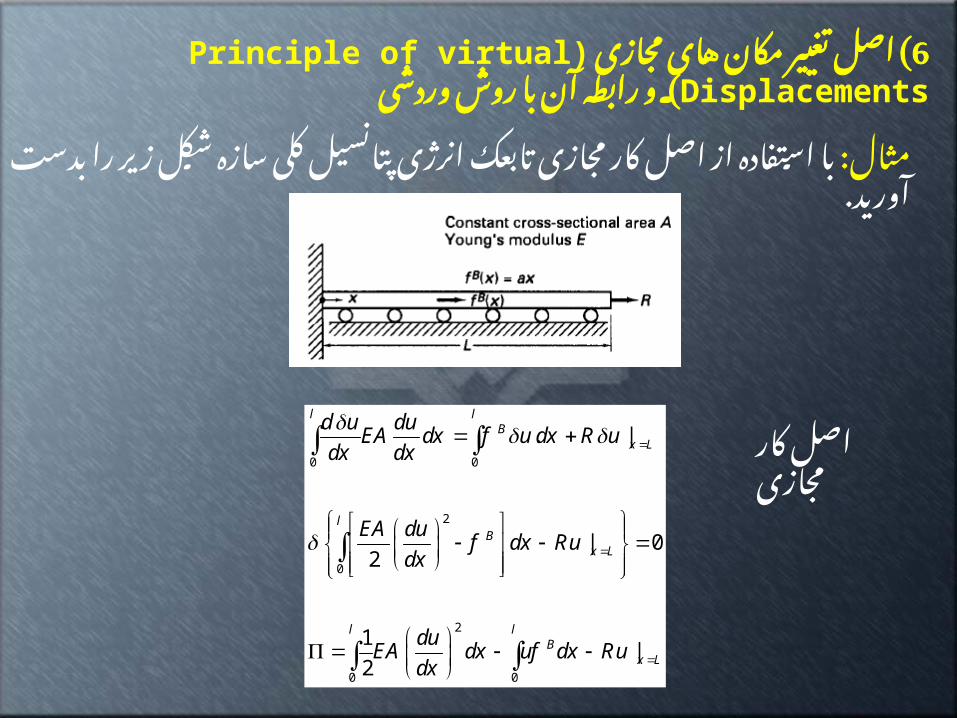
بFا اسFتفاده از اصFل کFار مجFازی تابعFک انFرژی پتانسFیل کلی سFازه مثFال:شکل زیر را بدست آورید.
0 0
2
0
2
0 0
. |
| 02
1|
2
l lB
x L
lB
x L
l lB
x L
d u duEA dx f u dx R u
dx dx
EA duf dx Ru
dx
duEA dx uf dx Ru
dx
اصل کار مجازی
Principle of virtual)اصل تغییر مکان های مجازی (6Displacements)و رابطه آن با روش وردشی

نتیجه گیری مهم
اصل تغییر مکان های مجازی و مانا بودن تابعک انرژی پتانسیل کلی سیستم کامال معادل همدیگر هستند و تمامی نتایج حاصله در بحث
) که در روی تابعک عمل می کند( و روش Ritzمقایسه روش های Galerkin که در روی معادله دیفرانسیل عمل می کند( در مورد اصل(
تغییر مکان های مجازی نیز صادق است.
بر روش Ritzبه عبارت دیگر با توجه به برتری نسبی روش Galerkin می توان پایه استخراج فرمول بندی عناصر محدود را ،
قرار داد.Ritzاصل تغییر مکان های مجازی و استفاده از روش
Principle of virtual)اصل تغییر مکان های مجازی (6Displacements)و رابطه آن با روش وردشی