有限要素法の基礎(大熊政明 august, 2003dosekkei/kuma/material_lectures/ucee_sys/... ·...
TRANSCRIPT

8有限要素法の基礎(大熊政明 August, 2003)
有限要素法は,今日,対象をまったく限定せずに「微分方程式を数値近似
解析する最も実用的手法」として広く普及している.構造動力学の分野でも理
論的数値解析法の中心的手法となっている.本章では具体的にトラス要素,オ
イラー梁要素,六面体アイソパラメトリック要素についての剛性行列と質量行
列の定式化を明解に解説することを試み,それによって有限要素法の基礎理論
を理解いただくこととする.なお,有限要素法では剛性行列と質量行列は理論
的定式化が完成しているが,減衰行列については減衰メカニズムの理論的モデ
ル化が現代でも困難なためや,産業界で取り扱いたい複雑な構造や複数の機械
コンポーネントの結合でできあがる機械システムの解析では剛性行列について
も精度良い妥当なモデルを作成することが困難となるので,理論的解析法を強
力に補完するために実験的数値解析法のアプローチもあることを述べておく.
8. 1 歴 史 概 観
有限要素法(Finite Element Method)は,1950年代初期に欧米航空宇
宙工学の分野における構造力学への応用に成功して誕生した.特に1956年
の Turner, Clough, Martin and Topp の共著論文”Stiffness and deflection
analysis of complex structures27)”が有名であり,この年を有限要素法誕生の
年として解説する本も多い.構造力学での成功後,有限要素法は動力学などの応
用力学への適用研究とともに,応用数学者も巻き込んで理論的研究が大いに展開
された.すなわち,有限要素法はRayleigh-Ritz法の応用手法であることを明ら
8. 1 歴 史 概 観 267
かにした1963年のMeloshの理論的研究”Basis for derivation of matrices
for the direct stiffness method28)”から,重み付き残差法に基づく定式化へ展
開されていった.そして,アイソパラメトリック要素など適用性の高い要素の
開発もなされた.その結果,有限要素法は,熱伝導,流体力学,電磁気学など
物理学および工学のさまざまな実用的な対象の問題の解析に利用される解析法
に発展した.今日では有限要素法は対象を限定せずに広く「微分方程式を数値
近似解析するための手法」と位置づけられる.以下の解説からもわかるとおり,
理論がシステマチックであり,まさにコンピュータによる解析手法として適し
ている.それゆえ欧米で開発されたいくつかの汎用プログラムは世界的に市販
され広く利用されている.そのような市販ソフトを利用すれば,アプリケーショ
ン解析者は,プログラム操作法さえ知れば有限要素法の理論についてはまった
く理解しなくても一応は解析できるのが現在である.しかし実は、精度良い解
析を行うための適切なモデル作成や解析精度検討を行うには,やはり力学と有
限要素理論を理解しておくことが重要である.ここでは振動・音響解析のための
有限要素法の基本的定式化を,基礎的な要素の定式化の一例も示しながら平易
に示す. なお,有限要素法に関する代表的テキストとしては Zienkiewiczの著
書29)を推薦しておく. 上記の有限要素法では、解析精度を上げるためには有
限要素分割規模を大規模にする.換言すれば、より小さな有限要素によって解
析対象物をモデル化する.そのために、モデルデータを作成するための負担が
大きいことが、実利用での問題点であることが認識されている.この課題を解
決するために、いろいろな便利な機能の前処理プログラムの開発研究がなされ
た.たとえば、有限要素モデルをグラフィック表示してモデル形状の妥当性を検
討しやすくするものや自動的に多くの有限要素で分割して入力データのファイ
ルを作成してくれるものである.この種の便利な前処理プロセスの研究とは別
に有限要素法のアルゴリズム自体を改良する研究もなされた.この言わば新し
い有限要素法はp法有限要素法と名づけられた.そして従来の方法はh法有限
要素法と呼ばれて識別されるようになった. p法有限要素法の開発の歴史を
概観すると、著者の知り得た範囲では次のようである.B.A.SzaboとG.C.Lee
の論文”Stiffness matrix for plates by Galerkin ’s Method” が1969年に
発表されており、その中で有限要素の数を増やすか各要素自由度を増やすこと
268 8. 有限要素法の基礎(大熊政明 August, 2003)
で解析精度の向上が図れると述べられている.このことなどから1960年代
後期には始まっていたと考えられる.1975年にはA.G.Peanoがp法に関す
る研究の博士論文を発表し、イタリアにもどって1978年にp法有限要素法
プログラム FIESTAを開発し、ダムの解析事例を解いている.1984年には
彼が学位を取得した大学のある St.LouisにNoetic Technologies Corporation
社が設立され、”PROBE”と名づけられたp法有限要素プログラムが開発され
た.それは後にMSC社のMSC/PROBEとなり、やがてMSC/NASTRAN
に組み込まれた.1980年代にはp法に関する多くの論文が発表され、19
90年代には欧米製の市販ソフトも数多く出回り、日本にも広く知れ渡って実
用的に利用されるようになっている.最後に、残念ながら有限要素法の研究発
展に対して日本人の貢献の足跡はほとんど見当たらなかったことを申し添えて
おく.
8. 2 理論の基礎概念
産業界で設計支援解析を希望する対象構造物はすべてと言ってよいほど複
雑な構造(形状の複雑さや部分毎に異なる材料が使われている複雑さなど)を
しているので,その構造物全体について運動方程式を解析的に解くことが困難
である.第 5章での分布定数系の解析方法を参考にするとわかると思う.たと
えば,弦の振動を考えてみる.弦の任意の位置についての運動方程式は微分方
程式(弦全長について成立)として表現することはできる.それを解こうとす
ると,弦が一様であればその微分方程式を満たす弦全体にわたる挙動表現の関
数を見つけることができるので第 5章での解説のような手法で解くことができ
る.しかし,太さや材料が場所場所で変化する複雑な場合については運動方程
式である微分方程式を弦全長に渡って満足する関数を見出すことが困難となる.
そこで,有限要素法は,幾何学的に単純で構造的に均一な造りである基礎的形
状の構造物については有限要素法以前からの手法である Rayleigh-Ritz法や重
み付き残差法で精度良く近似解析できることを発想の起点として,その解析可
能な幾何学的に単純な構造要素を多数の結合して複雑な形状の構造モデルを構
築して解こうとする発想の数値近似解析法である.
8. 2 理論の基礎概念 269
Y[
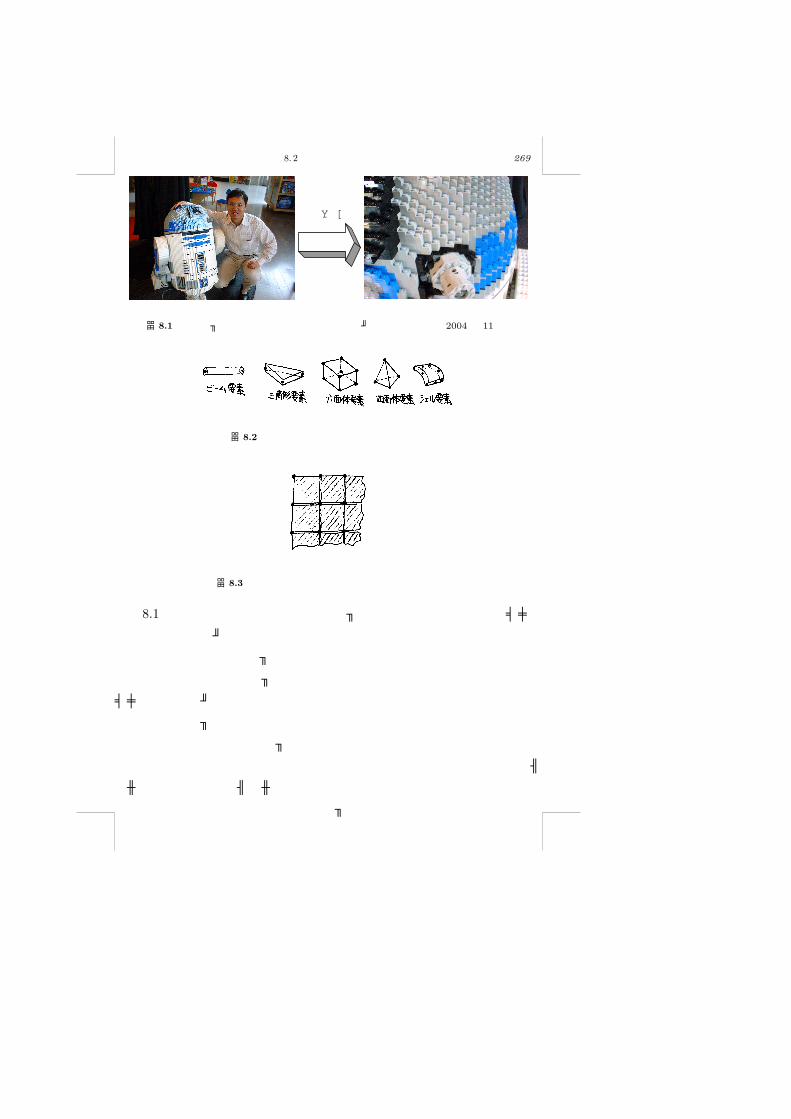
図 8.1 小さなブロックの結合でできたおもちゃロボット模型と著者(2004 年 11 月)
図 8.2 いろいろな種類の形状の有限要素の例
図 8.3 有限要素間の結合と力の伝達の離散化の概念
図 8.1を見てほしい.有名なおもちゃのブロックで作られた,あるアメリカ
映画に登場したロボットを模した作品である(勝手に肩を組んで喜んでいる紳
士は著者である).個々のブロックは六面体など幾何学的に単純な形状のもの
であるが,小さなそれらのブロックをたくさん組み立ててできたこの作品はア
メリカ映画のロボットにひじょうに良く似ている形となっている.有限要素法
は,まさにこのブロック遊びを例えとして有限要素法の概念は分かりやすく説
明できるので,「有限要素法はブロック遊び解析だ!」と著者は言いたい.
複雑な形状の解析対象の機械構造物に対して,それにできるだけ似た形状モ
デル(これを有限要素モデルと呼ぶ)を四面体,六面体,適当な肉厚の三角形
や四辺形,直棒などの形状をした小さなブロック(これを有限要素と呼ぶ)を
270 8. 有限要素法の基礎(大熊政明 August, 2003)
多数結合して作るのである.でき上った有限要素モデルの運動挙動は,そのモ
デルのどこかの有限要素に純粋に外部から作用する外力と,モデル中で隣接し
合う有限要素同士の作用反作用の釣り合い(内力)によって決定できるはずで
ある.したがって,個々の有限要素について,その自由体図における挙動特性を
正確に表現できる解析さえ可能であれば複雑な形状をした有限要素モデルの挙
動をも求めることができることになる.有限要素モデルの挙動が求まれば,そ
の結果が実際の解析対象の機械構造物の挙動の近似であるみなすのである.
個々の有限要素は,図 8.2の模式図のように,端点や頂点さらには辺の中点
などの位置を節点と設定して,それらの限られた節点だけに外力が作用し,要
素が変形なり運動をすると考えるモデル化をする.隣接する有限要素間の結合
も,図 8.3の模式図のように,節点同士で結合し,それ以外の辺や面での接触
による作用反作用力のやり取りはすべて節点での作用に置き換えてしまい,有
限要素モデルの解析段階では考えない.この概念によって有限要素モデルの全
節点自由度に一致する有限多自由度の剛性行列と質量行列を導出することを有
限要素法の核心的工程として,それに続く様々な構造動力学の解析を行うこと
ができる.
そこで,繰り返しになるが,有限要素法の核となる理論は,いろいろな種類
(形状)の有限要素単体についての定式化と,その結果得られる単体の質量行列
と剛性行列を重ね合わせ(組み合わせ)ていくことで解析対象物の質量行列と
剛性行列を導出する過程の理論である.ここ以降の3節で3種類の基本的有限
要素の定式化理論を例解するが,その解説で利用する第1から第11ステップ
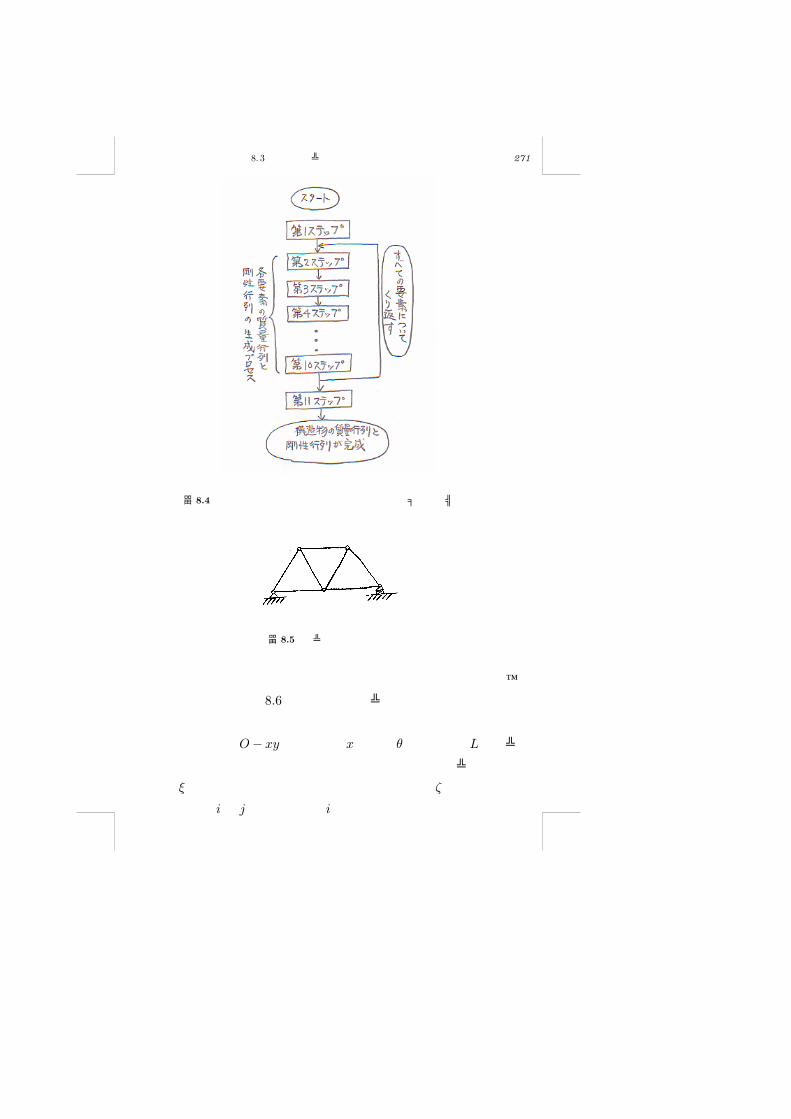
に対応させて,解析対象物の質量行列と剛性行列を得るフローチャートは図 8.4
となる.第2ステップから第10ステップは個々の有限要素についての定式化
過程であり,それを構造物を構成するすべての要素について繰り返すし,最後
に境界条件を設定して求めるべき質量行列と剛性行列が完成する.
8. 3 2次元トラス要素(伸縮挙動)
図 8.5に示すのはトラス構造物である.世の中にはトラス構造物が多数存在
する.比較的軽量で強度の高い大型構造を実現できるからである.トラス部材
8. 3 2次元トラス要素(伸縮挙動) 271
図 8.4 有限要素法による質量行列と剛性行列の導出フローチャート
図 8.5 トラス構造の基礎例
には,その軸方向の引張りもしくは圧縮の荷重しかかからない.そこで、最も
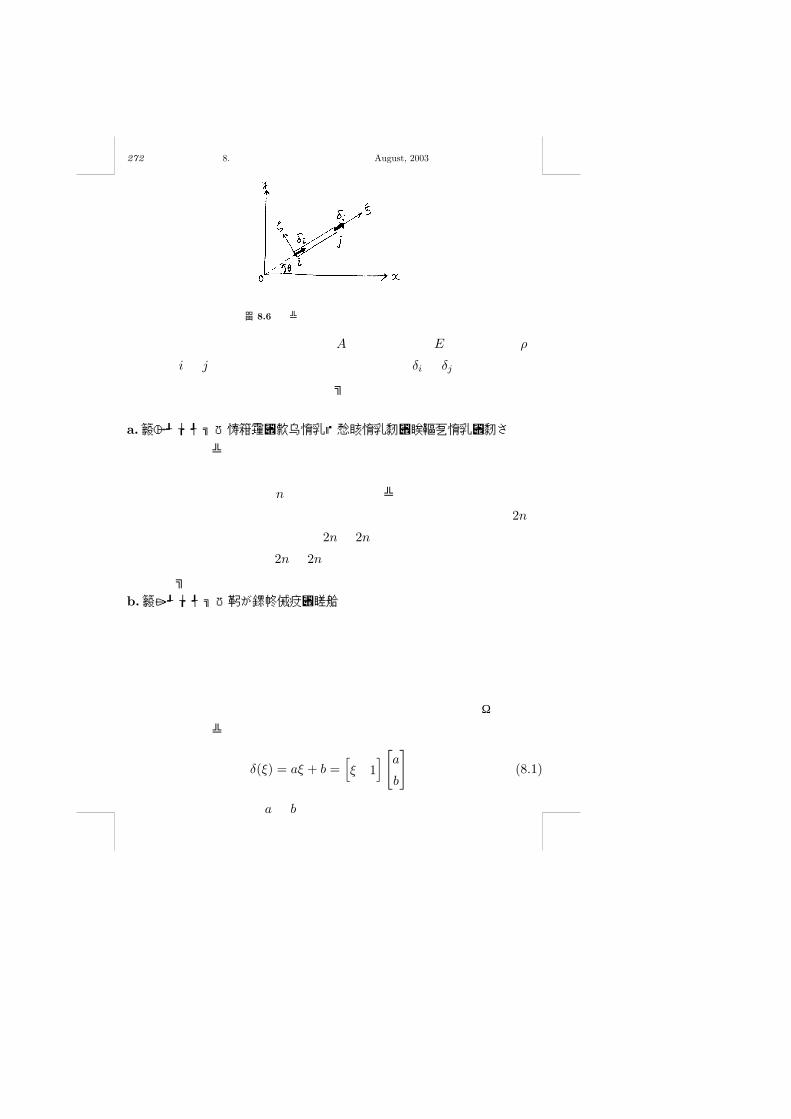
簡単な有限要素として,図 8.6に示す2次元トラスの有限要素単体についての
定式化を示す.
平面固定直角座標をO− xyとし,その x軸から θ傾けて長さ Lのトラス要
素を考える.図に示すとおりに,定式化の利便性を考えて,トラスの軸方向に
局所座標の ξ 軸を設定し,それに直角方向に第2の座標軸 ζ 軸を設定する.両
側の節点の番号を iと j として,節点 iが局所座標の原点とする.この要素の
272 8. 有限要素法の基礎(大熊政明 August, 2003)
図 8.6 トラス要素定式化のための定義
断面積と材料は要素内均一で,断面積を A,縦弾性係数を E,材料密度を ρと
表す.節点 iと j の軸方向変位(自由度)をそれぞれ δi と δj とする.以上の
定義に基づいて,次のような解析ステップでこの有限要素の質量行列と剛性行
列を導出することができる.
a.第1ステップ:構造物の質量行列と剛性行列用の正方零行列の用意
複数のこのトラス要素が,それぞれ要素の両端に設定された節点で互いに
結合して組み上がる構造物を考えると,その構造物中に存在する節点の数を数
えることができる.その数を nとする.2次元トラスであるので,1節点は2
自由度を有する.そこで,構造物を構成する節点すべての自由度合計は 2nで
ある.構造物の質量行列と剛性行列は 2n行 2n列の正方行列として得られるの
で,質量行列と剛性行列用に 2n行 2n列の正方零行列を2つ用意する.これが
第1ステップの作業である.
b.第2ステップ:変位表現関数の設定
両端の節点はそれぞれ1自由度(軸方向に変位するのみ)を与えるので,要素
の変位を2自由度で表現する.したがって,2自由度に対応して未定係数が2
つの何らかの関数で要素内部の変位を表現する.この関数を変位表現関数と呼
ぶことにする.この関数の適切な設定が有限要素法理論で最も重要であり,近
似数値解析である有限要素法の解析精度を支配する.この均一材料・断面の直
棒形状である本トラス要素については
δ(ξ) = aξ + b =[ξ 1
] [a
b
](8.1)
が適当である.未定係数は aと bで2つである.
8. 3 2次元トラス要素(伸縮挙動) 273
c.第3ステップ:未定係数を節点変位で表現
式(8.1)に節点座標とその変位を代入することで未定係数を2自由度の節点
変位の関数として表現することができる.すなわち,
[ξi 1
ξj 1
] [a
b
]=
[δi
δj
]
⇓[
0 1
L 1
] [a
b
]=
[δi
δj
](8.2)
の連立方程式から
[a
b
]=
[0 1
L 1
]−1 [δi
δj
]= − 1
L
[1 −1
−L 0
][δi
δj
](8.3)
のとおりに求められる.
d.第4ステップ:形状表現関数を節点変位で表現
式(8.3)を式(8.1)に代入することで,この有限要素内部の任意の位置の
変位を両端の節点自由度で表現する.すなわち,
δ(ξ) =[− ξ−L
LξL
] [δi
δj
](8.4)
e.第5ステップ:ひずみの表現
トラス要素は軸方向の伸縮だけを考える要素なので,材料力学の基礎知識か
ら,ひずみ ε はトラス要素の単位長さ当たりの伸びとして定義される。したがっ
て、式(8.4)の変位表現関数のξに関する1次導関数がひずみを表現する。す
なわち,要素内部の任意の位置でのひずみは
ε(ξ) =dδ(ξ)dξ
=[− 1
L1L
] [δi
δj
](8.5)
と表現される.
274 8. 有限要素法の基礎(大熊政明 August, 2003)
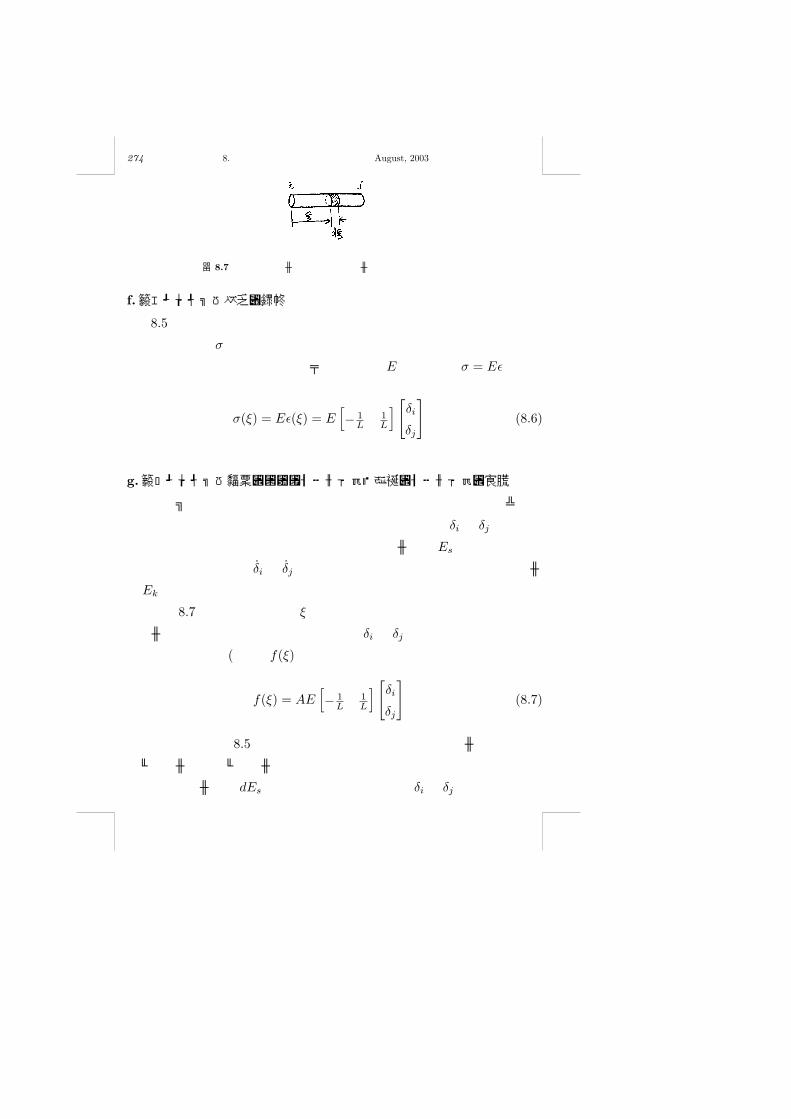
図 8.7 ひずみエネルギーと運動エネルギーの積分計算の図
f.第6ステップ:応力の表現
式(8.5)で求められた要素内部の任意の位置のひずみ表現関数に続いて,そ
のひずみから応力 σを表現する関数を導く.材料力学の基礎知識から本要素の
場合は,要素の材料の縦弾性係数(ヤング率)を E とすると,σ = Eεである
ので
σ(ξ) = Eε(ξ) = E[− 1
L1L
] [δi
δj
](8.6)
と得られる.
g.第7ステップ:要素のひずみエネルギーと運動のエネルギーの計算
前ステップまでで得られたひずみと応力の表現関数を使って,そのトラス要
素が両端の節点の変位が共に零状態(自然長)からそれぞれ δi と δj まで変位
した状態までに変化した時に蓄えられるひずみエネルギー Es と,同じく両端
の節点の速度がそれぞれ δi と δj の状態になったときに蓄えられる運動エネル
ギー Ek を計算する.
まず,図 8.7を用いて,任意の ξ の位置での微小厚みの部分についてのひず
みエネルギーを求めよう.両端の節点変位が δi と δj となったときのその位置
の断面に作用する力 (軸力)f(ξ)は軸力=応力×断面積の計算によって
f(ξ) = AE[− 1
L1L
] [δi
δj
](8.7)
である.ひずみは式(8.5)で得られている.そこで,ひずみエネルギー(仕事)
は力ベクトルと変位ベクトルの内積で計算できるはずであるから,この微小領
域のひずみエネルギー dEs は節点変位が零の状態から δi と δj となるまでのひ
ずみの変化について積分することで,
8. 3 2次元トラス要素(伸縮挙動) 275
dEs =12fT (ξ)ε(ξ)dξ =
12Aσ(ξ)T ε(ξ)dξ
=12AE
[δi
δj
]T [− 1
L1L
]T [− 1
L1L
] [δi
δj
]dξ
(8.8)
となる.ちょうどフックの法則に従うばね定数 kのばねが自然長から伸び δま
で静的に変化したときのひずみエネルギーが 1/2kδ2 と求められることと同じ
である.
同様に,微小厚みのその領域についての運動エネルギー dEk(ξ)を求めよう.
両端節点の速度が δiと δj のときの要素内部の ξの位置の速度は式(8.4)の節
点変位ベクトルを節点速度ベクトルに置き換えればよく.質量mの質点が速度
ベクトル v のときの運動エネルギーが 1/2mvT v で表現されることと同様に
dEk =12ρA
[δi
δj
]T [− ξ−L
LξL
]T [− ξ−L
LξL
] [δi
δj
]dξ (8.9)
と求められる.
そこで,式(8.8)と(8.9)をそれぞれ要素全長に亘って,すなわち ξ = 0
から ξ = Lまで,積分計算することでその要素がもつひずみエネルギーと運動
エネルギーを算出することができる.
Es =12
∫ L
0
AE
[δi
δj
]T [− 1
L1L
]T [− 1
L1L
] [δi
δj
]dξ
=12AE
[δi
δj
]T (∫ L
0
[− 1
L1L
]T [− 1
L1L
]dξ
) [δi
δj
] (8.10)
がひずみエネルギーであり,
Ek =12
∫ L
0
ρA
[δi
δj
]T [− ξ−L
LξL
]T [− ξ−L
LξL
] [δi
δj
]dξ
=ρA
2
[δi
δj
]T (∫ L
0
[− ξ−L
LξL
]T [− ξ−L
LξL
]dξ
) [δi
δj
] (8.11)
が運動エネルギーである.
276 8. 有限要素法の基礎(大熊政明 August, 2003)
h.第8ステップ:剛性行列と質量行列の定式化
両端節点の変位(自由度)の2自由度に対応した,求めるべき要素の剛性行列
と質量行列をそれぞれKとKとすると,ひずみエネルギーと運動エネルギーは
Es =12
[δi
δj
]T
K
[δi
δj
](8.12)
と
Ek =12
[δi
δj
]T
M
[δi
δj
](8.13)
と表現できるはずである.そこで,第7ステップで要素についての導出したひず
みエネルギーと運動エネルギーの式とこれらが同値となるためにはと考えると,
K = AE
∫ L
0
[− 1
L1L
]T [− 1
L1L
]dξ (8.14)
M = ρA
∫ L
0
[− ξ−L
LξL
]T [− ξ−L
LξL
]dξ (8.15)
のとおりに剛性行列と質量行列の式が得られる.具体的に積分計算すると
K =AE
L
[ 1 −1
−1 1
](8.16)
M = ρAL
[13
16
16
13
](8.17)
となる.これらが局所座標で表現したトラス要素の剛性行列と質量行列である.
局所座標上での表現として節点 i,j に作用する軸方向の外力を fiと fj とすれ
ば不減衰系の運動方程式は
M
[δi
δj
]+ K
[δi
δj
]=
[fi
fj
](8.18)
となる.
8. 3 2次元トラス要素(伸縮挙動) 277
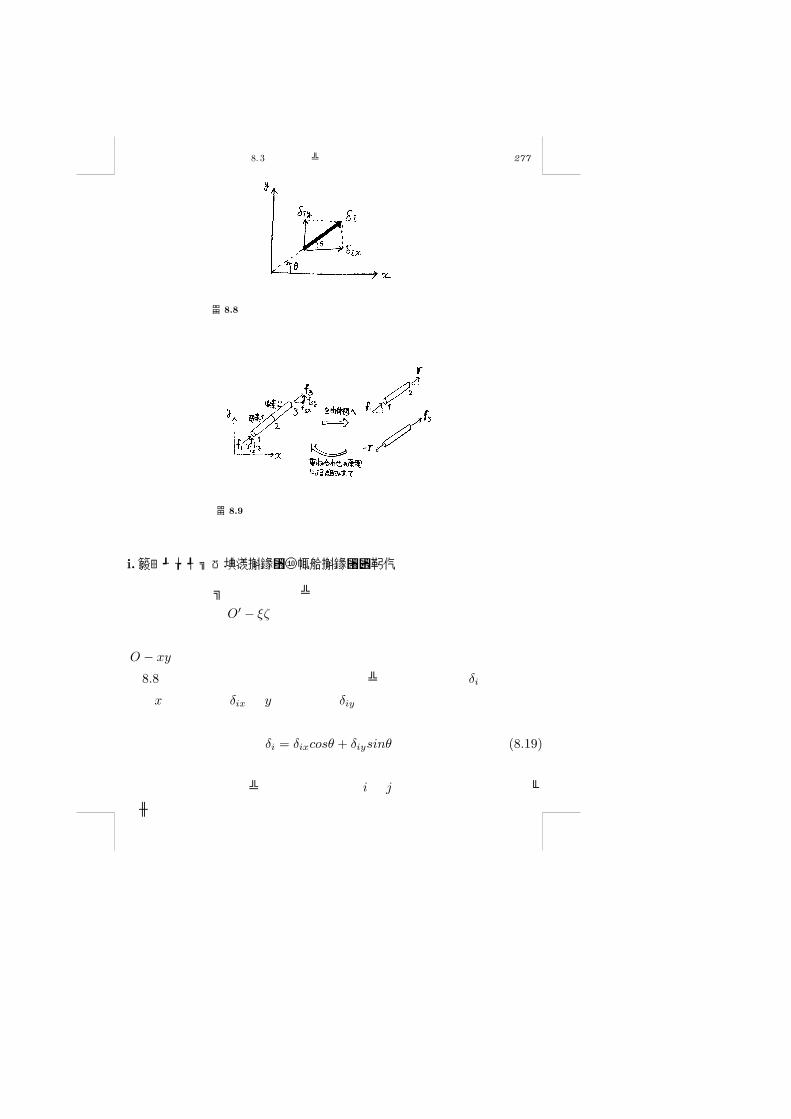
図 8.8 節点変位の固定座標と局所座標間の幾何学変換
図 8.9 2要素結合系による重ね合わせの原理の例示
i.第9ステップ:局所座標から固定座標への変換
第2~8ステップまでによるトラス要素の剛性行列と質量行列の定式化は,
利便的に局所座標系 O′ − ξζ 上で行った.構造物全体についての剛性行列と質
量行列を作成するために,その剛性行列と質量行列を固定座標系(全体座標系)
の O − xyに座標変換しなければならない.
図 8.8を参考に,局所座標系上で得られるトラス軸方向の変位 δiと,固定座
標系の x軸方向成分 δix と y軸方向成分 δiy の関係は幾何学的に
δi = δixcosθ + δiysinθ (8.19)
と表される.そこで,トラス要素両端の節点 iと j の局所座標系上での変位ベ
クトル(剛性行列と質量行列の2自由度に対応)は
278 8. 有限要素法の基礎(大熊政明 August, 2003)
[δi
δj
]=
[cosθ sinθ 0 0
0 0 cosθ sinθ
]
δix
δiy
δjx
δjy
(8.20)
と表現される.この式の三角関数を成分とする右辺の係数行列が,固定座標系
での節点変位から局所座標系上での節点変位への変換を行う座標変換行列であ
る.4自由度の列ベクトルが固定座標系上での両節点の変位ベクトルである.
以下,記述簡素化のためにその座標変換行列を R(θ),変位ベクトルを δxy と
表すことにする.
局所座標系での運動方程式(8.18)の左辺変位ベクトルと加速度ベクトルに
式(8.20)を代入すると
MR(θ)δxy + KR(θ)δxy =
[fi
fj
](8.21)
のとおりに変位と加速度は固定座標系へ変換できる.
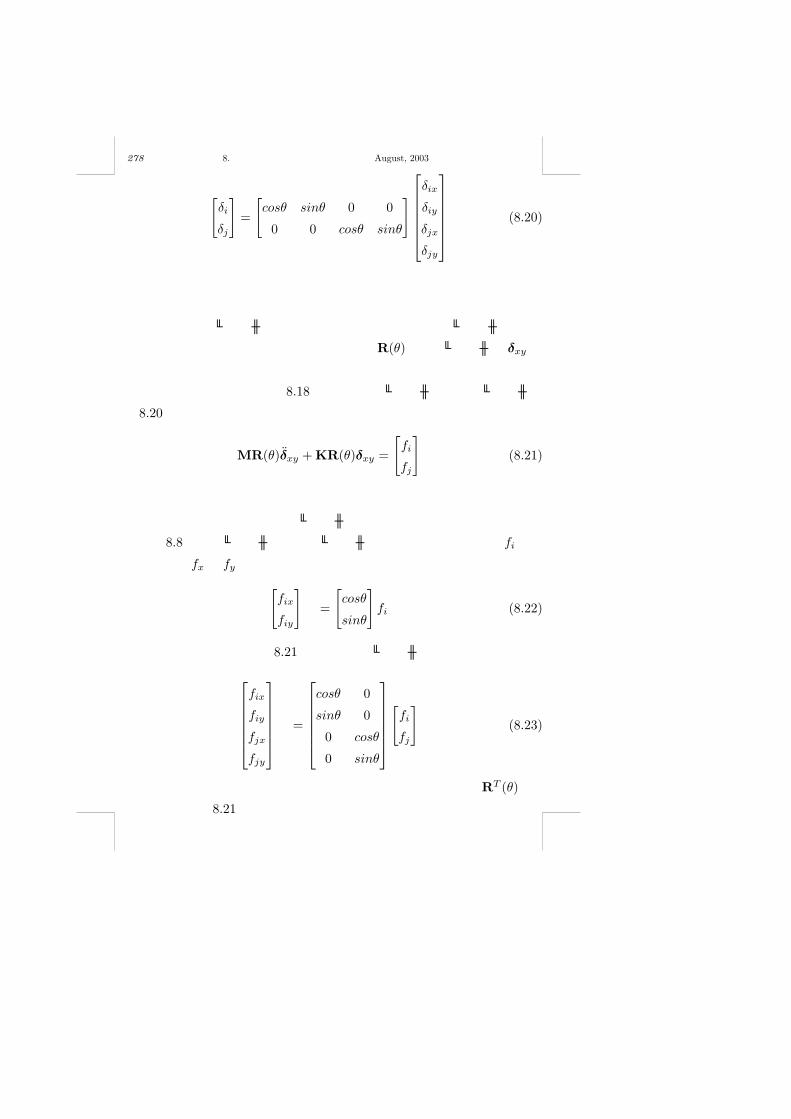
続いて,右辺に残っている外力ベクトルも固定座標系に変換しなければなら
ない.図 8.8の変位ベクトルの図を力ベクトルと読み換えて軸方向の力 fiの固
定座標系成分 fx と fy は
[fix
fiy
] =
[cosθ
sinθ
]fi (8.22)
と表せる.したがって,式(8.21)の右辺の力ベクトルを固定座標系に変換す
る式は
fix
fiy
fjx
fjy
=
cosθ 0
sinθ 0
0 cosθ
0 sinθ
[fi
fj
](8.23)
となる.右辺の4行2列の座標変換行列(係数行列)は簡略表記でRT (θ),で
ある.これに式(8.21)を代入すると
8. 3 2次元トラス要素(伸縮挙動) 279
RT (θ)MR(θ)δxy + RT (θ)KR(θ)δxy =
fix
fiy
fjx
fjy
(8.24)
となる.この式より,固定座標系表示の質量行列と剛性行列はそれぞれ
RT (θ)MR (8.25)
RT (θ)KR(θ) (8.26)
と求められる.この理論より,俗に局所座標から固定座標への座標変換公式は
「固定座標系の質量行列と剛性行列は局所座標系での質量行列と剛性行列に前
と後から座標変換行列を乗じることで求められる」と言われる.
j.第10ステップ:構造物全体の質量行列と剛性行列への組み込み
重ね合わせの原理に従って,第1ステップで構造物全体の自由度に対応す
る質量行列と剛性行列として準備された正方行列に,第9ステップで導出され
た固定座標系での質量行列と剛性行列を重ね合わせる.
重ね合わせの原理とは,各要素について自由体図を描いて作成される運動方
程式の一群について,要素間に発生している内力(自由体図では外力とみなさ
れる力)を表す未知数を作用反作用の法則に従って消去することで,構造物全
体についての運動方程式を連立方程式の形式で表現するための数学的方法のこ
とである.これを,図 8.9に示す2つのトラス要素からなる極簡単な構造物例
で説明する.自由体図の要素1の運動方程式は4自由度となり,形式的に
m(1)11 m
(1)12 m
(1)13 m
(1)14
m(1)21 m
(1)22 m
(1)23 m
(1)24
m(1)31 m
(1)32 m
(1)33 m
(1)34
m(1)41 m
(1)42 m
(1)43 m
(1)44
δ1x
δ1y
δ2x
δ2y
+
k(1)11 k
(1)12 k
(1)13 k
(1)14
k(1)21 k
(1)22 k
(1)23 k
(1)24
k(1)31 k
(1)32 k
(1)33 k
(1)34
k(1)41 k
(1)42 k
(1)43 k
(1)44
δ1x
δ1y
δ2x
δ2y
=
f1x
f1y
rx
ry
(8.27)
と記述される.ここで,右辺の外力ベクトル成分の中で rx と ry は節点2番で
の両要素間に発生する内力の要素1への作用を表し,質量行列と剛性行列の成
分の肩添字 (1) は要素1番であることを示す.f1x と f1y は純粋な外力を表す.
280 8. 有限要素法の基礎(大熊政明 August, 2003)
同様に,要素2単体についての運動方程式も
m(2)11 m
(2)12 m
(2)13 m
(2)14
m(2)21 m
(2)22 m
(2)23 m
(2)24
m(2)31 m
(2)32 m
(2)33 m
(2)34
m(2)41 m
(2)42 m
(2)43 m
(2)44
δ2x
δ2y
δ3x
δ3y
+
k(2)11 k
(2)12 k
(2)13 k
(2)14
k(2)21 k
(2)22 k
(2)23 k
(2)24
k(2)31 k
(2)32 k
(2)33 k
(2)34
k(2)41 k
(2)42 k
(2)43 k
(2)44
δ2x
δ2y
δ3x
δ3y
=
−rx
−ry
f3x
f3y
(8.28)
と表現できる.右辺の力ベクトル成分の −rx と −ry は節点2番での要素2へ
の作用内力を表す.
内力は求める必要がないとすると,これらの8本の連立方程式からその未知
数2つを消去して構造物を構成する3つの節点の自由度の合計数6となる6元
連立方程式として運動方程式を一体化できる.この操作が「重ね合わせ」であ
る.式(8.27)と式(8.28)の両辺を自由度の一致を考慮して,内力の2つの
成分を相殺するように重ね合わせると
m(1)11 m
(1)12 m
(1)13 m
(1)14 0 0
m(1)21 m
(1)22 m
(1)23 m
(1)24 0 0
m(1)31 m
(1)32 m
(1)33 + m
(2)11 m
(1)34 + m
(2)12 m
(2)13 m
(2)14
m(1)41 m
(1)42 m
(1)43 + m
(2)21 m
(1)44 + m
(2)22 m
(2)23 m
(2)24
0 0 m(2)31 m
(2)32 m
(2)33 m
(2)34
0 0 m(2)41 m
(2)42 m
(2)43 m
(2)44
δ1x
δ1y
δ2x
δ2y
δ3x
δ3y
+
k(1)11 k
(1)12 k
(1)13 k
(1)14 0 0
k(1)21 k
(1)22 k
(1)23 k
(1)24 0 0
k(1)31 k
(1)32 k
(1)33 + k
(2)11 k
(1)34 + k
(2)12 k
(2)13 k
(2)14
k(1)41 k
(1)42 k
(1)43 + k
(2)21 k
(1)44 + k
(2)22 k
(2)23 k
(2)24
0 0 k(2)31 k
(2)32 k
(2)33 k
(2)34
0 0 k(2)41 k
(2)42 k
(2)43 k
(2)44
δ1x
δ1y
δ2x
δ2y
δ3x
δ3y
=
f1x
f1y
0
0
f3x
f3y
(8.29)
となる.この例のように,各要素単体についての質量行列と剛性行列をあらか
じめ用意しておく構造物全体の節点自由度に対応する正方零行列のしかるべき
自由度成分へ加算する.
8. 3 2次元トラス要素(伸縮挙動) 281
k.第11ステップ:境界条件の設定
構造物全体の質量行列と剛性行列が完成したら,最後に構造物の境界条件の
設定,すなわち境界条件として固定拘束する節点自由度に対応する質量行列と
剛性行列の列と行を削除する操作を行う.この論理は下記のとおりである.
まず図 8.9の構造物の例を使って説明する.同図の構造物の節点1番の x方
向と y方向の変位を固定,すなわち,節点1番はその位置で回転自由ではある
が並進変位は完全に拘束される境界条件に設定された.それに加えて節点3番
の y方向変位も拘束するとする.自由体図で考えれば,節点を拘束するために
は外力が必要である.節点1番に作用するこの拘束力の x成分と y成分を r1x
と r1y とし,節点3番の y方向変位拘束のための力を r3y とする.この境界条
件では式(8.29)は
m(1)11 m
(1)12 m
(1)13 m
(1)14 0 0
m(1)21 m
(1)22 m
(1)23 m
(1)24 0 0
m(1)31 m
(1)32 m
(1)33 + m
(2)11 m
(1)34 + m
(2)12 m
(2)13 m
(2)14
m(1)41 m
(1)42 m
(1)43 + m
(2)21 m
(1)44 + m
(2)22 m
(2)23 m
(2)24
0 0 m(2)31 m
(2)32 m
(2)33 m
(2)34
0 0 m(2)41 m
(2)42 m
(2)43 m
(2)44
0
0
δ2x
δ2y
δ3x
0
+
k(1)11 k
(1)12 k
(1)13 k
(1)14 0 0
k(1)21 k
(1)22 k
(1)23 k
(1)24 0 0
k(1)31 k
(1)32 k
(1)33 + k
(2)11 k
(1)34 + k
(2)12 k
(2)13 k
(2)14
k(1)41 k
(1)42 k
(1)43 + k
(2)21 k
(1)44 + k
(2)22 k
(2)23 k
(2)24
0 0 k(2)31 k
(2)32 k
(2)33 k
(2)34
0 0 k(2)41 k
(2)42 k
(2)43 k
(2)44
0
0
δ2x
δ2y
δ3x
0
=
r1x
r1y
0
0
f3x
r3y
(8.30)
と記述できる.拘束力は未知数なので,左辺に移行し,拘束された節点自由度は
零なのでその自由度に対応する質量行列と剛性行列の列は意味をなさない(零
を乗じられればすべて結果は零).したがって,式(8.30)は
282 8. 有限要素法の基礎(大熊政明 August, 2003)
m(1)13 m
(1)14 0
m(1)23 m
(1)24 0
m(1)33 + m
(2)11 m
(1)34 + m
(2)12 m
(2)13
m(1)43 + m
(2)21 m
(1)44 + m
(2)22 m
(2)23
m(2)31 m
(2)32 m
(2)33
m(2)41 m
(2)42 m
(2)43
δ2x
δ2y
δ3x
+
−1 0 k(1)13 k
(1)14 0 0
0 −1 k(1)23 k
(1)24 0 0
0 0 k(1)33 + k
(2)11 k
(1)34 + k
(2)12 0
0 0 k(1)43 + k
(2)21 k
(1)44 + k
(2)22 0
0 0 k(2)31 k
(2)32 k
(2)33 0
0 0 k(2)41 k
(2)42 k
(2)43 −1
r1x
r1y
δ2x
δ2y
δ3x
r3y
=
0
0
0
0
f3x
0
(8.31)
となり,もし拘束力は求める必要ないならば,その分の連立数3を削除して
m(1)33 + m
(2)11 m
(1)34 + m
(2)12 m
(2)13
m(1)43 + m
(2)21 m
(1)44 + m
(2)22 m
(2)23
m(2)31 m
(2)32 m
(2)33
δ2x
δ2y
δ3x
+
k(1)33 + k
(2)11 k
(1)34 + k
(2)12 k
(2)13
k(1)43 + k
(2)21 k
(1)44 + k
(2)22 k
(2)23
k(2)31 k
(2)32 k
(2)33
δ2x
δ2y
δ3x
=
0
0
f3x
(8.32)
の運動方程式を解くことでよい.この式(8.32)は固定拘束する節点自由度に
対応する質量行列と剛性行列の行と列を消去して,3行3列分縮小した自由度
の運動方程式であることがわかる.以上で2次元トラス要素で組み立てられる
構造物の質量行列と剛性行列が完成である.
8. 4 2次元オイラー梁要素(曲げ挙動)
片持ち梁が最も簡単な例の構造物として,フレーム構造で”ラーメン (Rah-
men)”と呼ぶ構造物形式がある.トラスと異なり,フレーム部材に曲げモーメ
8. 4 2次元オイラー梁要素(曲げ挙動) 283
図 8.10 片持ち梁のオイラー曲げ梁 FEM モデル
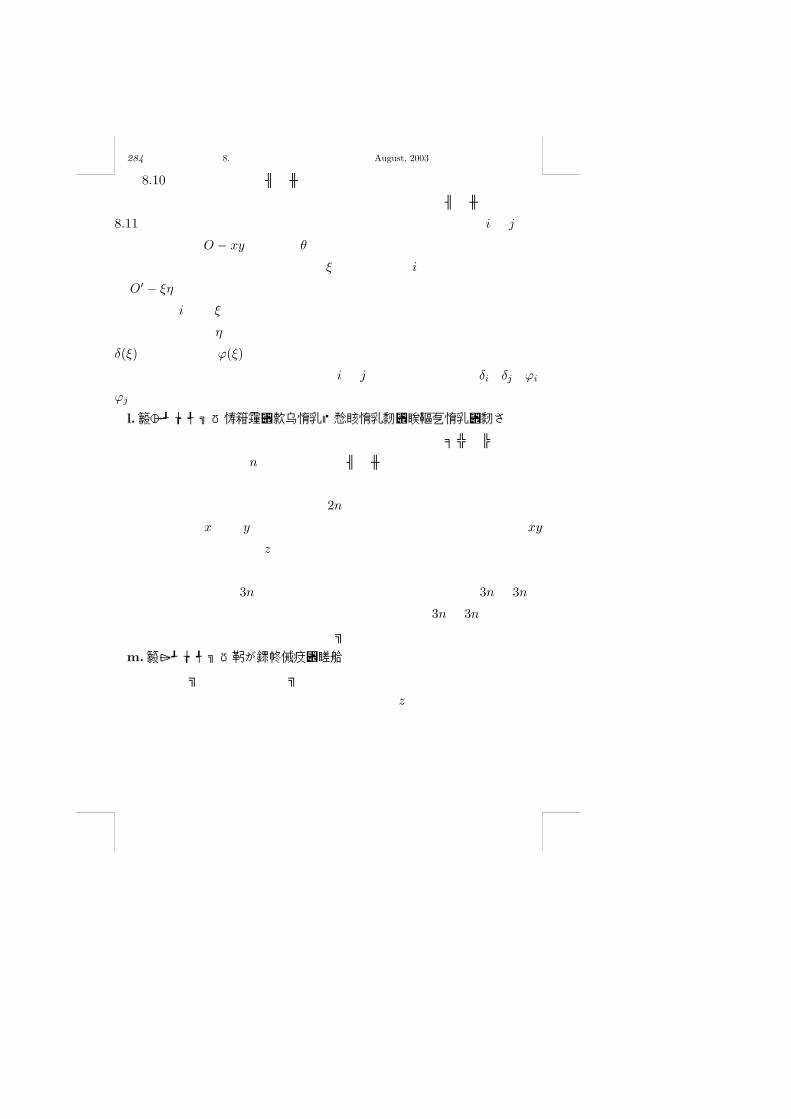
図 8.11 片持ち梁のオイラー要素定式化
ントが生じるものである.ここでは,第2の基礎的有限要素の例として,オイ
ラーの梁と呼ばれる曲げ梁要素の定式化を解説する.実用的にも大いに役立つ
要素である.
オイラー梁モデルとは,梁の長さに比べてその断面の寸法が桁違いに小さく,
曲げ変形の程度も梁の断面形状は変化せず,かつ,曲げの中立面(線)との直
角性を維持していると近似仮定できる条件での曲げ理論による梁の挙動を表現
するモデルである.現実的に多くのフレーム構造物の解析に適用できるモデル
である.
284 8. 有限要素法の基礎(大熊政明 August, 2003)
図 8.10の単純な片持ち梁モデルの例で解説する.有限要素解析ではこの梁を
固定点から自由端までいくつかの曲げ梁の有限要素の直列でモデル化する.図
8.11にはその任意の梁要素単体を示す.両端に設定する節点番号を iと j とす
る.固定座標系 O − xy とは角度 θの傾きをなしており,要素の定式化の利便
性のために梁の長手方向を第1座標軸 ξ として,節点 iを原点とする局所座標
系 O′ − ξηを設定する.曲げ挙動を考えるので,局所座標系の原点に位置づけ
られる節点 iから ξ の位置の点の自由度として,横方向(要素軸方向と直角な
たわみ方向である η軸方向)の,曲げ変形していない自然状態からの並進変位
δ(ξ)と傾き角変位 ϕ(ξ) の2自由度を設定する.これにより曲げ変形を表現す
る.この定義によって,要素両端の節点 iと j の変位はそれぞれ,δi,δj,ϕi,
ϕj と表現することにする.
l.第1ステップ:構造物の質量行列と剛性行列用の正方零行列の用意
複数のこの要素の両端節点で互いに結合して組み上がるフレーム構造物に
存在する節点の総数を.nとする.2次元モデルであるので,1節点は局所座
標表現で2自由度(たわみ方向並進変位と角変位)を有する.そこで,構造物
を構成する節点すべての自由度合計は 2nである.固定座標系ではその1自由
度の並進変位は x軸と y 軸成分の2自由度となるので,右手座標系として xy
平面の垂線となる第3軸の z軸を固定座標系に考えてその軸回りの角変位と認
識できる節点の角変位を加えて1節点3自由度となる.そこで,構造物の有す
る節点の自由度合計は 3nとなる.構造物の質量行列と剛性行列は 3n行 3n列
の正方行列として得られるので,質量行列と剛性行列用に 3n行 3n列の正方零
行列を2つ用意する.これが第1ステップである.
m.第2ステップ:変位表現関数の設定
このステップから第9ステップまでは局所座標系上にて定式化が行われる.
両端の節点はそれぞれ2自由度(たわみ方向並進と z 軸回りの角変位)を与え
るので,要素の変位を4自由度で表現する.したがって,未定係数が4つの何
らかの関数で要素内部の変位を表現する.この関数を変位表現関数と呼ぶこと
にする.この関数の適切な設定が有限要素法理論で最も重要であり,近似数値
解析である有限要素法の解析精度を支配する.この要素は均一材料,均一断面
の直棒形状であるとすれば,そのたわみ変位は
8. 4 2次元オイラー梁要素(曲げ挙動) 285
δ(ξ) =[1 ξ ξ2 ξ3
]
α0
α1
α2
α3
(8.33)
と表現することが適当である.未定係数は α0から α3の4つである.この式よ
り,要素の角変位は,当然,式(8.33)を ξ で微分した1次導関数で表現でき
る.すなわち,
θ(ξ) =∂δ(ξ)∂ξ
=[0 1 2ξ 3ξ2
]
α0
α1
α2
α3
(8.34)
が角変位表現関数である.
なお,有限要素法の基本はh法有限要素法であって,要素の節点変位自由度
の合計数と同じ数の未定係数で変位関数を表そうとするものである.しかし,
p法有限要素法では式(8.33)をもっと高次までの多項式で表現し,節点変位
自由度への変換にあまってしまう未定係数はそのまま残して解析しようとする
方法である.たとえば p個,冗長に未定係数を設定するとすれば
δ(ξ) =[1 ξ ξ2 ξ3 ξ4 ξ5 · · · ξp+3
]
α0
α1
α2
α3
β1
β2
...
βp
(8.35)
と設定する.これについては後節のアイソパラメトリック六面体要素のところ
で簡潔に解説する.
286 8. 有限要素法の基礎(大熊政明 August, 2003)
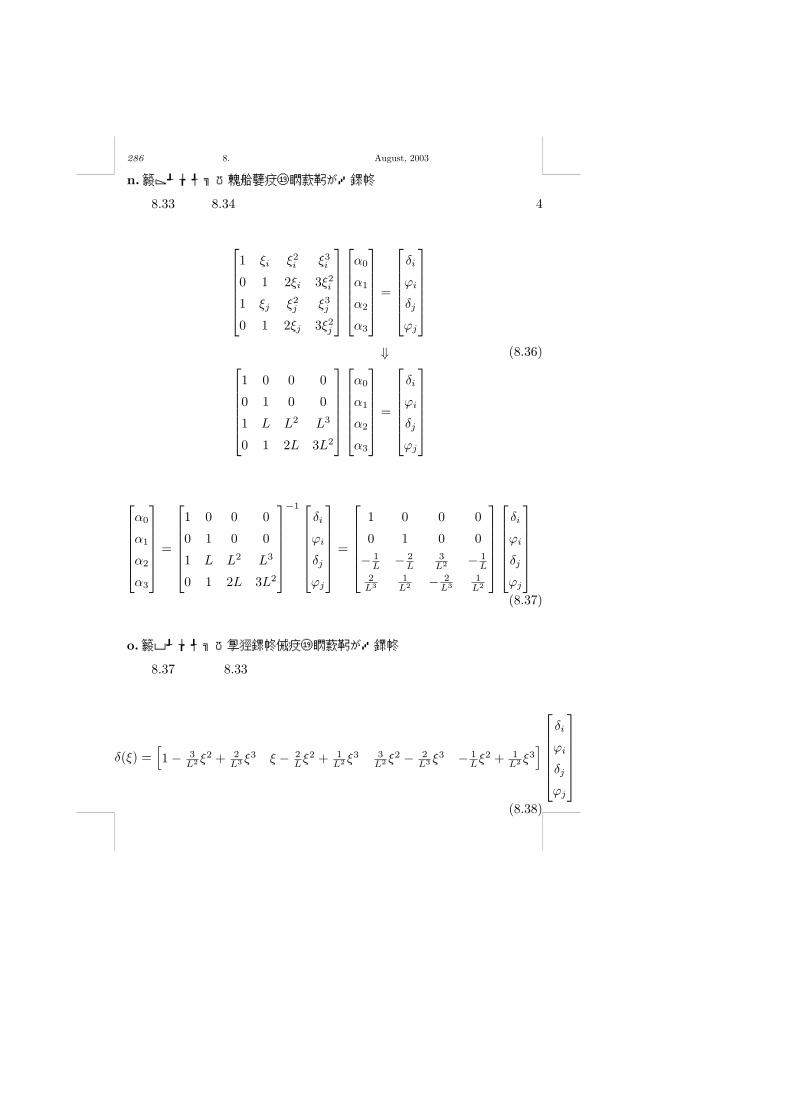
n.第3ステップ:未定係数を節点変位で表現
式(8.33)と(8.34)に節点座標とその変位を代入することで未定係数を 4
自由度の節点変位の関数として表現することができる.すなわち,
1 ξi ξ2i ξ3
i
0 1 2ξi 3ξ2i
1 ξj ξ2j ξ3
j
0 1 2ξj 3ξ2j
α0
α1
α2
α3
=
δi
ϕi
δj
ϕj
⇓
1 0 0 0
0 1 0 0
1 L L2 L3
0 1 2L 3L2
α0
α1
α2
α3
=
δi
ϕi
δj
ϕj
(8.36)
の連立方程式から
α0
α1
α2
α3
=
1 0 0 0
0 1 0 0
1 L L2 L3
0 1 2L 3L2
−1
δi
ϕi
δj
ϕj
=
1 0 0 0
0 1 0 0
− 1L − 2
L3
L2 − 1L
2L3
1L2 − 2
L31
L2
δi
ϕi
δj
ϕj
(8.37)
のとおりに求められる.
o.第4ステップ:形状表現関数を節点変位で表現
式(8.37)を式(8.33)に代入することで,この有限要素内部の任意の位置
のたわみ変位を両端の節点自由度で表現する.すなわち,
δ(ξ) =[1− 3
L2 ξ2 + 2L3 ξ3 ξ − 2
Lξ2 + 1L2 ξ3 3
L2 ξ2 − 2L3 ξ3 − 1
Lξ2 + 1L2 ξ3
]
δi
ϕi
δj
ϕj
(8.38)
8. 4 2次元オイラー梁要素(曲げ挙動) 287
p.第5ステップ:ひずみの表現
梁の曲げの力学に関しては,材料力学の基礎知識から,曲率 τ がひずみ(曲
げひずみ)を意味し,曲げモーメント T が断面にかかる力を意味する.断面2
次モーメントを Iz,縦弾性係数(ヤング率)を E と表すと,
T = EIzτ (8.39)
で両者の関係を表現できる.
曲率は,角変位の変化率であるから式(8.4)の変位表現関数をξに関して2
階微分すれば得られる.すなわち,要素内部の任意の位置での曲率 τ(ξ)は
τ(ξ) = −∂2δ(ξ)∂ξ2
= −[− 6
L2 + 12L3 ξ − 4
L + 6L2 ξ 6
L2 − 12L3 ξ − 2
L + 6L2 ξ
]
δi
ϕi
δj
ϕj
(8.40)
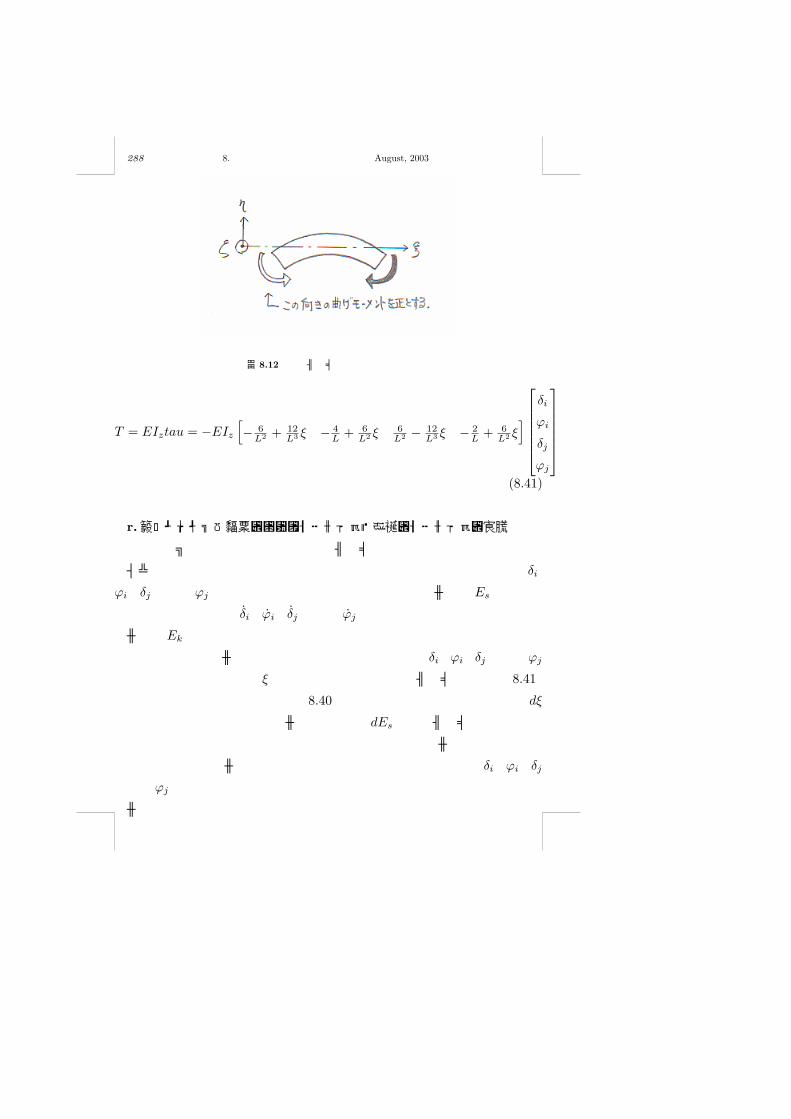
と表現される.ここで,曲率を求めるのに,たわみ変位の2階微分にわざわざ
マイナス符号が付いている理由は,単に便宜的的ですよと言っても正しいので
あるが,次のような論理による.いまは平面問題を考えておりその座標系は固
定座標で O − xy座標系,局所座標系で O′ − ξηである.右手座標系としてそ
れらを設定すると,たとえ2次元問題を扱う場合でも第3の軸(平面 x− yと
ξ − η に垂直な軸)を設定すると代数学的扱いが統一できる.そして,右手座
標系として第3軸を設定する.曲げモーメント(すなわち力のモーメント)や
角速度などもベクトル量として代数学で表現される.その力のモーメントや角
速度のベクトル表示は,それらの回転中心軸を右ねじと想定した場合に,右ね
じが進む方向へのベクトルで回転の向きを表現し,大きさをベクトルの長さで
表現する.そこで,第3軸(平面 ξ − ηに垂直な軸,本節の図 8.12では紙面か
ら飛び出してくる方向)を考えて,その軸回りの右ねじ回転方向(反時計回り)
の曲げモーメントの値を正とするためである.
q.第6ステップ:応力の表現
すでに式(8.39)で解説済みのとおりに,梁の曲げ問題では曲げモーメント
と曲率の関係が応力とひずみの関係に相当する.曲げモーメント T (ξ)は
288 8. 有限要素法の基礎(大熊政明 August, 2003)
図 8.12 曲げモーメントの正負の向き
T = EIztau = −EIz
[− 6
L2 + 12L3 ξ − 4
L + 6L2 ξ 6
L2 − 12L3 ξ − 2
L + 6L2 ξ
]
δi
ϕi
δj
ϕj
(8.41)
と得られる.
r.第7ステップ:要素のひずみエネルギーと運動のエネルギーの計算
前ステップまでで得られた曲率と曲げモーメントの表現関数を使って,その
オイラー梁要素の両端の節点たわみと角変位が共に零状態(自然状態)から δi,
ϕi,δj および ϕj まで変位した時に蓄えられるひずみエネルギー Es と,同じ
く両端の節点の速度が δi,ϕi,δj および ϕj になったときに蓄えられる運動エ
ネルギー Ek を計算する.
まず,ひずみエネルギーを求めよう.両端の節点変位が δi,ϕi,δj および ϕj
となったときの要素内位置 ξの断面で発生している曲げモーメントは式(8.41)
である.曲げひずみ(曲率)は式(8.40)であるので,その位置での微小幅 dξ
の要素領域に関するひずみエネルギー(仕事)dEs は曲げモーメントと曲げひ
ずみの内積でき計算できる.すなわち,曲げのひずみエネルギーについては,
曲率変化だけがエネルギーを与えるので,両端節点が自然状態から δi,ϕi,δj
および ϕj となるまでの曲げひずみの変化について積分することで,ひずみエ
ネルギーは

8. 4 2次元オイラー梁要素(曲げ挙動) 289
dEs =12TT (ξ)τ(ξ)dξ =
12EIzτ(ξ)T τ(ξ)dξ
=12EIz
δi
ϕi
δj
ϕj
T
− 6L2 + 12
L3 ξ
− 4L + 6
L2 ξ6
L2 − 12L3 ξ
− 2L + 6
L2 ξ
[− 6
L2 + 12L3 ξ − 4
L + 6L2 ξ
6L2 − 12
L3 ξ − 2L + 6
L2 ξ]
δi
ϕi
δj
ϕj
dξ
(8.42)
となる.
同様に,その微小幅領域についての運動エネルギー dEk(ξ)を求めよう.両
端節点の速度が δi,ϕi,δj および ϕj のときの要素内部の ξの位置の速度は式
(8.38)の節点変位ベクトルを節点速度ベクトルに置き換えればよく.質量 m
の質点が速度ベクトル vのときの運動エネルギーが 1/2mvT vで表現されるこ
とと同様に
dEk =12ρA
δi
ϕi
δj
ϕj
T
1− 3L2 ξ2 + 2
L3 ξ3
ξ − 2Lξ2 + 1
L2 ξ3
3L2 ξ2 − 2
L3 ξ3
− 1Lξ2 + 1
L2 ξ3
[1− 3
L2 ξ2 + 2L3 ξ3 ξ − 2
Lξ2 + 1L2 ξ3
3L2 ξ2 − 2
L3 ξ3 − 1Lξ2 + 1
L2 ξ3]
δi
ϕi
δj
ϕj
dξ
(8.43)
と求められる.
そこで,式(8.42)と(8.43)をそれぞれ要素全長に亘って,すなわち ξ = 0
から ξ = Lまで,積分計算することでその要素がもつひずみエネルギーと運動
290 8. 有限要素法の基礎(大熊政明 August, 2003)
エネルギーを算出することができる.
Es =12EIz
δi
ϕi
δj
ϕj
T
(∫ L
0
− 6L2 + 12
L3 ξ
− 4L + 6
L2 ξ6
L2 − 12L3 ξ
− 2L + 6
L2 ξ
[− 6
L2 + 12L3 ξ − 4
L + 6L2 ξ
6L2 − 12
L3 ξ − 2L + 6
L2 ξ]dξ
)
δi
ϕi
δj
ϕj
(8.44)
がひずみエネルギーであり,
dEk =12ρA
δi
ϕi
δj
ϕj
T
(∫ L
0
1− 3L2 ξ2 + 2
L3 ξ3
ξ − 2Lξ2 + 1
L2 ξ3
3L2 ξ2 − 2
L3 ξ3
− 1Lξ2 + 1
L2 ξ3
[1− 3
L2 ξ2 + 2L3 ξ3 ξ − 2
Lξ2 + 1L2 ξ3
3L2 ξ2 − 2
L3 ξ3 − 1Lξ2 + 1
L2 ξ3]dξ
)
δi
ϕi
δj
ϕj
(8.45)
が運動エネルギーである.
s.第8ステップ:剛性行列と質量行列の定式化
両端節点の変位(自由度)の4自由度に対応した,求めるべき要素の剛性行列
と質量行列をそれぞれKとKとすると,ひずみエネルギーと運動エネルギーは
Es =12
δi
ϕi
δj
ϕj
T
K
δi
ϕi
δj
ϕj
(8.46)
8. 4 2次元オイラー梁要素(曲げ挙動) 291
と
Ek =12
δi
ϕi
δj
ϕj
T
M
δi
ϕi
δj
ϕj
(8.47)
と表現できるはずである.そこで,第7ステップで要素についての導出したひず
みエネルギーと運動エネルギーの式とこれらが同値となるためにはと考えると,
K =EIz
∫ L
0
1− 3L2 ξ2 + 2
L3 ξ3
ξ − 2Lξ2 + 1
L2 ξ3
3L2 ξ2 − 2
L3 ξ3
− 1Lξ2 + 1
L2 ξ3
[1− 3
L2 ξ2 + 2L3 ξ3 ξ − 2
Lξ2 + 1L2 ξ3
3L2 ξ2 − 2
L3 ξ3 − 1Lξ2 + 1
L2 ξ3]dξ
(8.48)
M =ρA
∫ L
0
1− 3L2 ξ2 + 2
L3 ξ3
ξ − 2Lξ2 + 1
L2 ξ3
3L2 ξ2 − 2
L3 ξ3
− 1Lξ2 + 1
L2 ξ3
[1− 3
L2 ξ2 + 2L3 ξ3 ξ − 2
Lξ2 + 1L2 ξ3
3L2 ξ2 − 2
L3 ξ3 − 1Lξ2 + 1
L2 ξ3]dξ
(8.49)
のとおりに剛性行列と質量行列の式が得られる.具体的に積分計算すると
K =2EIz
L3
6 3L −6 3L
3L 2L2 −3L L2
−6 −3L 6 −3L
3L L2 −3L 2L2
(8.50)
292 8. 有限要素法の基礎(大熊政明 August, 2003)
M =ρAL
420
156 22L 54 −13L
22L 4L2 13L −3L2
54 13L 156 −22L
−13L −3L2 −22L 4L2
(8.51)
となる.これらが局所座標で表現したオイラー梁要素の剛性行列と質量行列で
ある.
t.第9ステップ:局所座標から固定座標への変換
第8ステップで求められた剛性行列と質量行列の定式化は,利便的に局所座
標系 O′ − ξζ 上で行った.構造物全体についての剛性行列と質量行列を作成す
るために,それらを固定座標系(全体座標系)O−xy上のものに座標変換しな
ければならない.座標変換の論理はトラス要素の項で詳述したので,ここでは
座標変換行列と変換式を示すに止める.
図を参照してトラス要素の場合と同じように変換行列をR(θ)とすると,本
要素のたわみ変位は η軸方向であること,および,角変位は第3軸回りである
から局所座標と固定座標で同一向き(紙面に垂直)であることに注意して
δi
ϕi
δj
ϕj
=
−sinθ cosθ 0 0 0 0
0 0 1 0 0 0
0 0 0 −sinθ cosθ 0
0 0 0 0 0 1
δix
δiy
ϕi
δjx
δjy
ϕj
(8.52)
と簡単な幾何学で求めることができる.右辺の三角関数などで構成される係数
行列が座標変換行列R(θ)である.
「固定座標系の質量行列と剛性行列は局所座標系での質量行列と剛性行列に
前と後から座標変換行列を乗じることで求められる」の座標変換公式に基づい
て,固定座標系表示の質量行列と剛性行列はそれぞれ
RT (θ)MR (8.53)
RT (θ)KR(θ) (8.54)
8. 4 2次元オイラー梁要素(曲げ挙動) 293
の計算で求められる.
オイラー梁要素では節点に角変位自由度があるために1節点3自由度となる
ことがトラス要素の2自由度と異なるだけで,第10ステップと第11ステッ
プの工程とその論理は完全に同一であり,本要素について改めて詳述する必要
はないと思われるので簡潔に一言だけ記すこととする.
第10ステップ「構造物全体の質量行列と剛性行列への組み込み」は,重ね
合わせの原理に従って,第1ステップで構造物全体の自由度に対応する質量行
列と剛性行列として準備された正方行列に,第9ステップで導出された固定座
標系での質量行列と剛性行列を重ね合わせる. 重ね合わせの原理の解説につい
てはトラス要素の第10ステップを参照のこと.
第11ステップ「境界条件の設定」についても構造物全体の質量行列と剛性
行列が完成したら,構造物の境界条件の設定,すなわち境界条件として固定拘
束する節点自由度に対応する質量行列と剛性行列の列と行を削除する操作を行
えばよい.
294 8. 有限要素法の基礎(大熊政明 August, 2003)
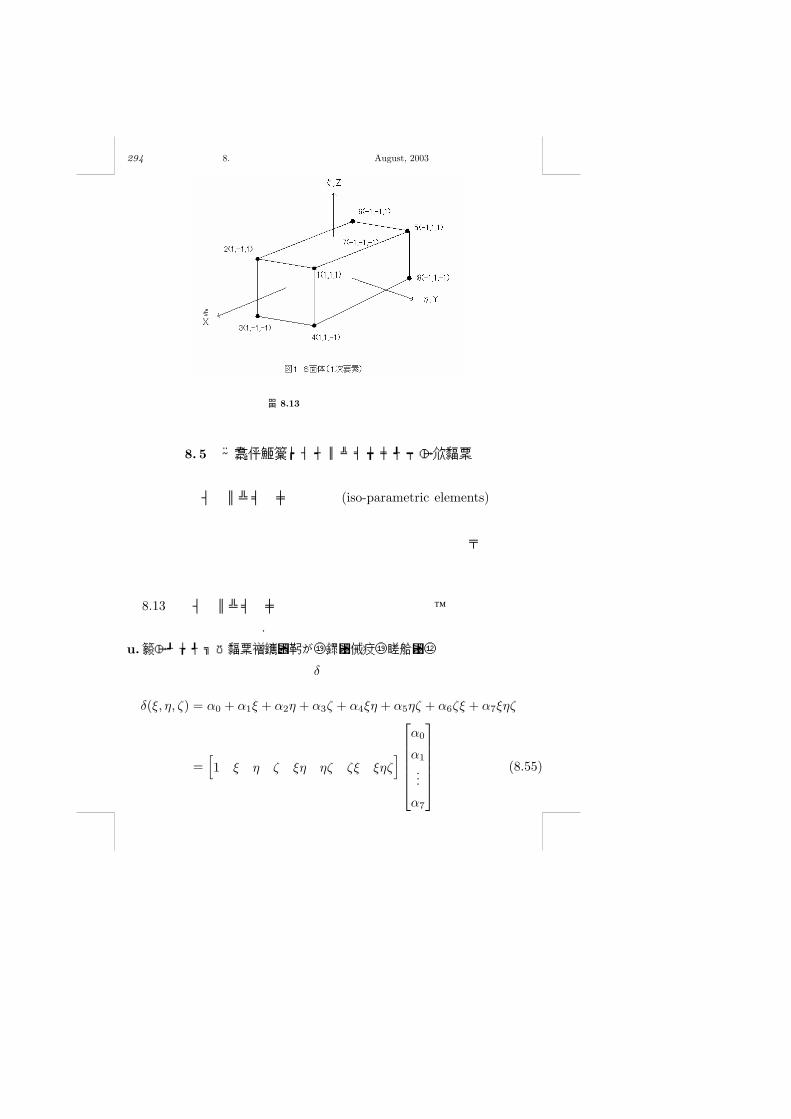
図 8.13 6面体(1次要素)
8. 5 h法六面体アイソパラメトリック1次要素
この節ではアイソパラメトリック要素 (iso-parametric elements)の基礎と
して六面体h法1次要素とp法要素の剛性行列,質量行列の導出理論を解説す
る.特にp法要素は解析精度が高く,かつ,後述するとおりにグヤンの静縮小
を利用する,ちょっとした工夫によってp法特有の高次変位関数の未定係数を
消去することで,使用時にはh法要素とまったく同じに扱うことができる.
図 8.13のアイソパラメトリック6面体1次要素について、その剛性行列と質
量行列の定式化を解説する.
u.第1ステップ:要素内部の変位を表す関数を設定する
その要素内部の任意の位置の変位 δ を表す関数を
δ(ξ, η, ζ) = α0 + α1ξ + α2η + α3ζ + α4ξη + α5ηζ + α6ζξ + α7ξηζ
=[1 ξ η ζ ξη ηζ ζξ ξηζ
]
α0
α1
...
α7
(8.55)
8. 5 h法六面体アイソパラメトリック1次要素 295
と設定する.ここで,座標系 (X,Y, Z)は物理座標系であり,座標系 (ξ, η, ζ)は
どの座標軸方向へも要素の辺が ±1の範囲なる正規化座標系を表す.
v.第2ステップ:未定係数を節点自由度(変位)で表現する
未定係数の α0 ∼ α7で表現されている変位関数を要素内部の変位を8点の節
点変位で表現し直す.すなわち,次式のように,節点位置での式 (8.55) を構成
して連立方程式として未定係数 α0 ∼ α7 を求めて,それを式 (8.55) に代入す
ることで表現し直す.
δ1
δ2
...
δ8
=
δ(1, 1, 1)
δ(1,−1, 1)...
δ(−1, 1,−1)
=
1 1 1 1 1 1 1 1
1 1 −1 1 −1 −1 1 −1
1 1 −1 −1 −1 1 −1 1
1 1 1 −1 1 −1 −1 −1
1 −1 1 1 −1 1 −1 −1
1 −1 −1 1 1 −1 −1 1
1 −1 −1 −1 1 1 1 −1
1 −1 1 −1 −1 −1 1 1
α0
α1
...
α7
(8.56)
式(8.56)から未定係数は
α0
α1
...
α7
=18
1 1 1 1 1 1 1 1
1 1 1 1 −1 −1 −1 −1
1 −1 −1 1 1 −1 −1 1
1 1 −1 −1 1 1 −1 −1
1 −1 −1 1 −1 1 1 −1
1 −1 1 −1 1 −1 1 −1
1 1 −1 −1 −1 −1 1 −1
1 −1 1 −1 −1 1 −1 1
δ1
δ2
...
δ8
(8.57)
と求められる.したがって式(8.55)は
296 8. 有限要素法の基礎(大熊政明 August, 2003)
δ(ξ, η, ζ) =18
[1 ξ η ζ ξη ηζ ζξ ξηζ
]
1 1 1 1 1 1 1 1
1 1 1 1 −1 −1 −1 −1
1 −1 −1 1 1 −1 −1 1
1 1 −1 −1 1 1 −1 −1
1 −1 −1 1 −1 1 1 −1
1 −1 1 −1 1 −1 1 −1
1 1 −1 −1 −1 −1 1 −1
1 −1 1 −1 −1 1 −1 1
δ1
δ2
...
δ8
(8.58)
と得られ,実際にこれを展開すると,
δ(ξ, η, ζ) =18(1 + ξ + η + ζ + ξη + ηζ + ζξ + ξηζ)δ1
+18(1 + ξ − η + ζ − ξη − ηζ + ζξ − ξηζ)δ2
...
+18(1− ξ + eta− ζ − ξη − ηζ + ζξ + ξηζ)δ8 (8.59)
となる.この式のかっこ内を因数分解して簡潔表示すると
8. 5 h法六面体アイソパラメトリック1次要素 297
δ(ξ, η, ζ) =18(1 + ξ)(1 + η)(1 + ζ)δ1 +
18(1 + ξ)(1− η)(1 + ζ)δ2
+ · · ·+ 18(1− ξ)(1+)(1− ζ)δ8
=[18(1 + ξ)(1 + η)(1 + ζ)
18(1 + ξ)(1− η)(1 + ζ) · · ·
· · · 18(1− ξ)(1+)(1− ζ)
]
δ1
δ2
...
δ8
=[N1 N2 · · · N8
]
δ1
δ2
...
δ8
(8.60)
である.この式で使われたN1~N8は六面体の正規化座標で表現された関数な
ので形状関数と呼ばれる.そこで,節点 iでの座標を (ξi, ηi, ζi)と表現すると
δi に対応する形状関数は
Ni =18(1 + ξξi)(1 + ηηi)(1 + ζζi) (8.61)
のように統一的に記述できる.
ここで,式(8.60)は六面体要素のx方向,y方向およびz方向の変位に使
用できる.
w.第3ステップ:ひずみを表現する関数を導く
第2ステップの結果を利用して、x方向(ξ)、y方向(η)、z方向(ζ)
の変位を u,v,wと表現して記述しよう.
298 8. 有限要素法の基礎(大熊政明 August, 2003)
u =[N1 N2 · · · N8
]
δ1
δ2
...
δ8
v =[N1 N2 · · · N8
]
δ1
δ2
...
δ8
w =[N1 N2 · · · N8
]
δ1
δ2
...
δ8
(8.62)
材料力学の知識から3次元の場のひずみの定義は
ε =
εx
εy
εz
γxy
γyz
γzx
=
∂u/∂x
∂v/∂y
∂w/∂z
∂u/∂y + ∂v/∂x
∂v/∂z + ∂w/∂y
∂w/∂x + ∂u/∂z
=[B1 B2 · · · B8
]
u1
v1
w1
u2
v2
w2
...
u8
v8
w8
(8.63)
である.ここで,
8. 5 h法六面体アイソパラメトリック1次要素 299
Bi =
∂Ni/∂x 0
0 ∂Ni/∂y 0
0 0 ∂Ni/∂z
∂Ni/∂y ∂Ni/∂x 0
0 ∂Ni/∂z ∂Ni/∂y
∂Ni/∂z 0 ∂Ni/∂x
(8.64)
と計算できる.しかし,形状関数は式(8.62)でわかるように正規化座標系で
表現された関数なので、直接上記の計算をすることは難しい. そこで、次のよ
うに座標変換の関係から上記の微分値を求めるのである.
微分の公式(連鎖法則)で、例えば
∂Ni
∂ξ=
∂Ni
∂x
∂x
∂ξ+
∂Ni
∂y
∂y
∂ξ+
∂Ni
∂z
∂z
∂ξ(8.65)
の式の成立は知っているであろう.これを利用して式(8.67)が導ける.すな
わち,
∂Ni
∂ξ
∂Ni
∂η
∂Ni
∂ζ
=
∂x/∂ξ ∂y/∂ξ ∂z/∂ξ
∂x/∂η ∂y/∂η ∂z/∂η
∂x/∂ζ ∂y/∂ζ ∂z/∂ζ
∂Ni/∂x
∂Ni/∂y
∂Ni/∂z
= J
∂Ni/∂x
∂Ni/∂y
∂Ni/∂z
(8.66)
である.右辺の係数行列 J はヤコビ行列と呼ばれ,一種の座標変換行列である.
このヤコビ行列は陽に求めることができる.今,物理座標系と正規化座標系の
関係は六面体要素のX,Y,Z方向の寸法をそれぞれLx,Ly,Lz として,図 8.13
に示すように要素の中央に座標系の原点を設定すると,要素内部の任意の点の
座標は
x =12Lxξ
y =12Lyη
z =12Lzζ
(8.67)
と記述できる.そこで,式(8.67)を用いてヤコビ行列は具体的に求めること
300 8. 有限要素法の基礎(大熊政明 August, 2003)
ができる.その結果を利用して
∂Ni/∂x
∂Ni/∂y
∂Ni/∂z
= J−1
∂Ni
∂ξ
∂Ni
∂η
∂Ni
∂ζ
(8.68)
によりBi を計算することができる.
x.第4ステップ:応力・ひずみ関係式を準備する
材料力学の知識から、等方性材料に関しては応力-ひずみ関係行列Dは
D =E
(1 + ν)(1− ν)
1 ν ν 0 0 0
ν 1 ν 0 0 0
ν ν 1 0 0 0
0 0 0 (1−2ν)2 0 0
0 0 0 0 (1−2ν)2 0
0 0 0 0 0 (1−2ν)2
(8.69)
であり,応力 σ はひずみの関数として
σ = D(ε− ε0) + σ0 (8.70)
のように表現できる.ここで,E は縦弾性係数(ヤング率),ν はポアソン比
(鉄系では ν ' 0.3)であり,ε0 は初期ひずみ(残留ひずみ),σ0 は初期応力
(残留応力)を表す.
y.第5ステップ:積分計算による剛性行列と質量行列の算出
いよいよ目的の要素剛性行列と質量行列を得る段階である.この演算の根拠
はすでにオイラー梁要素での解説で示した通りなので,ここでは具体的な計算
方法のみを記すこととする.
まず,物理座標系と正規化座標系の関係から次式が成立する.
dxdydz = det|J |dξdηdζ (8.71)
そこで,初期ひずみと初期応力はともにゼロの場合には,要素が蓄えるひずみ
エネルギーと運動エネルギーの計算に基づいて,剛性行列K は
8. 5 h法六面体アイソパラメトリック1次要素 301
K =∫ 1
−1
∫ 1
−1
∫ 1
−1
BT DBdet|J |dξdηdζ (8.72)
で,質量行列M は
M = ρ
∫ 1
−1
∫ 1
−1
∫ 1
−1
NT Ndet|J |dξdηdζ (8.73)
と計算して求めることができる.行列 B は式(8.63)の右辺の係数行列
[B1, B2, · · ·B8] である.行列N は式(8.62)を一体表現する行列であり
u
v
w
=
N1 0 0 N2 0 0 · · · N8 0 0
0 N1 0 0 N2 0 · · · 0 N8 0
0 0 N1 0 0 N2 · · · 0 0 N8
u1
v1
w1
...
u8
v8
w8
= N
u1
v1
w1
...
u8
v8
w8
(8.74)
である.積分計算はガウスの数値積分法を使えばよい.
z.第6ステップ(実行不要):全体座標への座標変換についての注意点
第5ステップまででは便宜的にx、y、z座標とξ、η、ζ軸の方向がそれ
ぞれ一致している図を用いて説明した.トラス要素やオイラー梁の曲げに関す
る有限要素では全体座標系への座標変換処理が必要であったように,この要素
についても第6ステップとして必要となるように思われるかもしれないが,通
常アイソパラメトリック要素の定式化は、次に示すような座標関係を用いるの
でその座標関係で物理座標x、y、zが全体座標系となり,不要となる.
要素内部の任意の点 (x,y,z)は,要素の変位に関する式(8.62)とまったく同
様に,

302 8. 有限要素法の基礎(大熊政明 August, 2003)
x =[N1 N2 · · · N8
]
x1
x2
...
x8
y =[N1 N2 · · · N8
]
y1
y2
...
y8
z =[N1 N2 · · · N8
]
z1
z2
...
z8
(8.75)
と表現される.したがって,要素形状は直六面体である必要はない(もっとも
形状が極端にゆがんだ形状までにしてしまうと解析精度は劣ってしますので注
意は必要だが).そして,ヤコビ行列は
J =
∂x/∂ξ ∂y/∂ξ ∂z/∂ξ
∂x/∂η ∂y/∂η ∂z/∂η
∂x/∂ζ ∂y/∂ζ ∂z/∂ζ
=
∂N1∂ξ
∂N2∂ξ · · · ∂N8
∂ξ
∂N1∂η
∂N2∂η · · · ∂N8
∂η
∂N1∂ζ
∂N2∂ζ · · · ∂N8
∂ζ
x1 y1 z1
x2 y2 z2
......
...
x8 y8 z8
(8.76)
で計算する.
8. 6 p法有限要素をh法1次要素に変換した要素 303
8. 6 p法有限要素をh法1次要素に変換した要素
h法1次要素では、式(8.55)から理解されるように, ξ,η,ζ方向にそれぞ
れ1次関数的な変位場しか表現していない. しかし、実際の構造の変形はそう
ではない場合も発生する. そのためにh法1次要素ではひじょうに多くの要素
で構造物をモデル化しなければならず,解析効率と精度がよくない.著者とし
てはあまりお勧めできない.精度改善にはh法の高次要素を用いる方法と,p
法有限要素を用いる方法の2つの選択肢である.しかし実用の観点からは、h
法1次要素の頂点節点物理自由度だけで処理したいとの実行上の制約条件が課
せられる場合もある.この理由は学術的および技術開発的には消極的理由とな
るが,入力データ(要素分割)を自動作成してくれる前処理プログラムの多く
は現在のところh法1次要素に対応するのみであり,高次要素を用いたりする
と最悪の場合すべて手作業で有限要素分割して入力データを作らなければなら
なくなるからである.そこで、この問題に簡単に対処する方法として,著者は
p法有限要素として生成した要素剛性行列と質量行列を内部パラメータ自由度
に関して Guyanの静縮小法で縮小し、h法1次要素とまったく同じ自由度の
剛性行列と質量行列を作成して,それを利用することを勧める.ここでは,そ
の作成方法の要点を述べる.
式(8.55)に代わる式として

304 8. 有限要素法の基礎(大熊政明 August, 2003)
δ(ξ, η, ζ) = α0 + α1ξ + α2η + α3ζ + α4ξη + α5ηζξ
+ α6ζ + α7ξηζ − p1ξ2 − p2η
2 − p3ζ2
=[1 ξ η ζ ξη ηζ ζξ ξηζ
]
α0
α1
...
α7
+[−ξ2 −η2 −ζ2
]
p1
p2
p3
(8.77)
を設定する.上記h法の解説での第2,第3ステップとして,未定係数の α0
から α7 までを8頂点の節点変位 δと追加された未定係数 p1 から p3 とで表す.
式展開をh法と同様に行うと,結局,式(8.60)に換わる式として
δ(ξ, η, ζ) =[N1 N2 · · · N8 N9 N10 N11
]
δ1
δ2
...
δ8
p1
p2
p3
(8.78)
が構成できる.ここで
N9 = 1− ξ2
N10 = 1− η2
N11 = 1− ζ2
(8.79)
である.式(8.74)に換わる式は
8. 6 p法有限要素をh法1次要素に変換した要素 305
u
v
w
=
N1 0 0 N2 0 0 · · · N8 0 0
0 N1 0 0 N2 0 · · · 0 N8 0
0 0 N1 0 0 N2 · · · 0 0 N8
u1
v1
w1
...
u8
v8
w8
+
N9 N10 N11 0 0 0 0 0 0
0 0 0 N9 N10 N11 0 0 0
0 0 0 0 0 0 N9 N10 N11
p1ξ
p2ξ
p3ξ
...
p3ζ
= N
u1
v1
w1
...
u8
v8
w8
−p1ξ
...
p3ζ
= N
δ
−p
(8.80)
である.なお,この式の列ベクトル中に−の記号があるが,それはそれより上の節点変位の24自由度 δ と下部分の9自由度 p を区切る便宜で記している.
このようにして,要素剛性行列と質量行列を求めれば,最初の24自由度は
節点変位を表す自由度,残りの9自由度はp法のいわゆる内部自由度 (Internal
freedom) を表す.内部自由度は要素内部の変位場を要素単独に表現するパラ
306 8. 有限要素法の基礎(大熊政明 August, 2003)
メータなので,複数要素が隣接結合しても独立である.すなわち,構造物全体
の剛性行列と質量行列を作成するための重ね合わせの時(作用反作用の法則に
従って考える)に重ね合わせる必要がない.そこで,重ね合わせをする前の要
素剛性行列と質量行列の段階で,次に示すように,Guyan の静縮小により内
部自由度を縮退することができる.剛性行列を節点変位自由度に対応する24
自由度と p1ξ から p3ζ の内部自由度の9自由度に区分して次式のようにシンボ
リックに部分行列構成で表現しよう.
[Kδδ Kδp
Kpδ Kpp
]
[Mδδ Mδp
Mpδ Mpp
] (8.81)
そこで,Guyanの静縮小の理論に基づいて剛性行列から,
p = −K−1pp Kpδδ (8.82)
の自由度従属化(静縮小)から[δ
p
]=
[I
−K−1pp Kpδ
]δ (8.83)
自由度縮小変換式を得る.したがって,この式の右辺の係数行列(自由度縮小
化行列)を使って,座標変換の基本論理によって,p法要素の33自由度の剛
性行列と質量行列は
K =
[I
−K−1pp Kpδ
]T [Kδδ Kδp
Kpδ Kpp
][I
−K−1pp Kpδ
]
M =
[I
−K−1pp Kpδ
]T [Mδδ Mδp
Mpδ Mpp
][I
−K−1pp Kpδ
] (8.84)
の演算で,あたかもh法の1次要素とまったく同じ節点自由度の24自由度だ
けからなる行列に変換できる.
8. 7 進化的構造最適化法 307
8. 7 進化的構造最適化法
解説した p法h法変換6面体有限要素(キュービック要素)を用いた構造物最
適化の基礎的1例として,自動進化型構造最適化法での基礎的例題を示す.49)50)
有限要素はすべて同一寸法の小さな立方体要素を用いることとする.川にか
かる橋を連想しての基礎的検討事例である.まず初期構造は四角中空構造とし
て,両端下側は固定境界条件,底面は車両や人の通行のために最適化範囲外と
して,最適化対象領域は両側と上面部分とした.そして,底面各所に下向きの
ある大きさの荷重を作用させた場合の,静解析を行い,各立方体要素の変形を
ひずみとして求め,そのひずみから各要素が蓄えるひずみエネルギーを算出す
る.大きな値のひずみエネルギーを持つ要素は荷重に対抗するために大いに働
いている要素であり,小さな値の要素は働いていない要素と判断できる.そこ
で,前者の要素のまわりには補強のために設計空間として許される範囲におい
て新しい有限要素を付加し,後者の要素は不要と判断して削除する.この単純
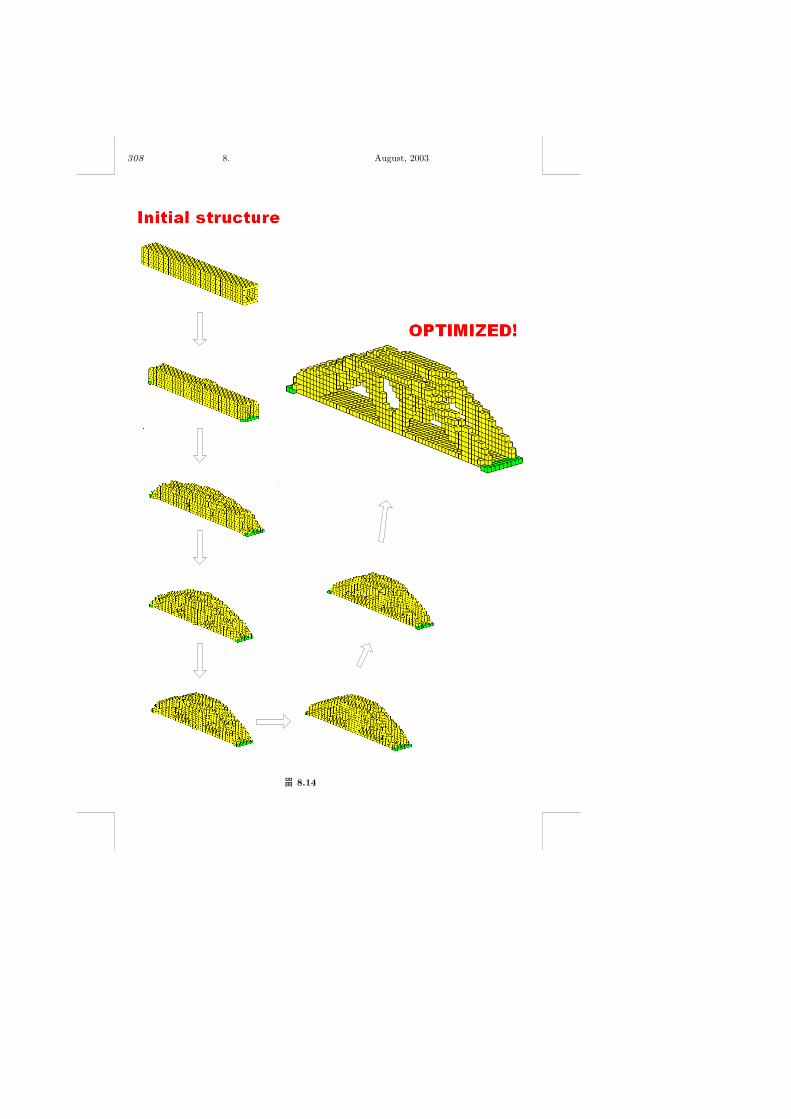
な構造最適化操作を何度も反復することで,図 8.14に示すように,位相変化も
含めて初期構造物が姿を変えて最終的にはトラス構造的な形状となる.
図 8.15は,同じく橋を想像する基礎検討事例であるが,この場合には,橋中
央部分の橋脚の構造を変化させて,元の橋構造の 1次共振振動数は約 2350Hz
であったものを 4000Hzに橋脚構造の体積(重量)をできるだけ増加させずに
実現する構造動特性を最適化である.
構造最適化の理論の基本的概念は次のとおりである.初期構造物について固
有値化解析を行い,1次から5次程度までの固有振動数と固有モードを求める.
固有モードは質量行列に関して正規化したものとして得て,その固有モードを
変位とした場合の各有限要素が有するひずみエネルギー Es を計算する.その
固有モードを速度変位とみなした場合の運動エネルギー Ek も計算する.そし
て,各有限要素についてレイリー商Es/Ekを計算し,比較する.レイリー商の
値が大きな要素はその構造物の剛性を維持するために働いており,固有振動数
を高める,または,その値に維持している役目を果たしていると考えることが
できる.一方,小さな値の要素は質量として働き,固有振動数をその値まで下
308 8. 有限要素法の基礎(大熊政明 August, 2003)
図 8.14 金君の事例

8. 7 進化的構造最適化法 309
1 st (2349Hz) 1 st (4028Hz)
図 8.15 金君の事例
げてしまっており,もしこのような要素が削除されれば固有振動数は増加する
と想像される.そこで,レイリー商の値の高い要素のまわりには固有振動数を
増加させるために新しい要素を付加し,レイリー商の値がひじょうに低い要素
は削除する操作する.このような単純な操作の繰り返してで位相構造も含めた
動特性の最適化ができる.なお,動特性の最適化においては,もちろん,静荷
重と強度についての最適化判定も同時に行うことと,要素削除については,場
合によっては,レイリー商の値がひじょうに低い要素であってもそれを削除す
ると,その両側の構造部分が離れてしまい,固有振動数が低下してしまう場合
も発生するので,そのような急激な不連続性の発生を防ぐアルゴリズム上の工
夫を組み込まなければならない.
9部分構造合成法(大熊政明@Copyright2006)
有限要素法などを使って,解析対象物(事象)を多自由度行列形式で数学モ
デルに表現して数値解析で解く場合に,その自由度を大きくしたモデルであれ
ばあるほど解析精度は良くなることが一般論として知られている.別の観点か
らは,複雑な形状の対象物を精密に有限要素モデル化するには,各有限要素は
小さなものとして,それを莫大な数を使って組み上げて作成せざるをない場合
が多い. 第 8章のはじめで解説したように有限要素法はブロック遊び的方法に
よる解析手法であるからである. そこで,必然的に数学モデルの剛性行列や質量
行列の自由度は莫大な大きさになる.現実的にコンピュータのメモリーの大規
模化と高速演算能力の発達によって,現在では100万自由度程度の大規模解
析まで多くの企業や研究所の設計支援解析で実行できるようになりつつある状
況である.このような大きな自由度,または,さらにもっと大きな自由度の方
程式を効率よく解くための方法として,コンピュータが現在ほど発達していな
かった1970年代~80年代頃に,部分構造合成法と分類される多くの方法
が研究された.演算用メモリーに展開できない分のデータはハードディスクに
一時記録して,限られれた演算メモリー容量で,それ以上の大規模自由度モデ
ルの解析を実行しようとする方法である.部分構造合成法全般については「部
分構造合成法(培風館)」51)がある.ここでは,その一例のみの解説として,拘
束モード型合成法の1手法(合成方法としては,一重合成法,多重合成法(具
体的には二重合成法)および逐次合成法)について汎用プログラム作成に役立
つように配慮して基本解説する.
9. 1 部分構造の内部領域と結合領域の表現 311
9. 1 部分構造の内部領域と結合領域の表現
複数の部分構造の結合形態は見かけ上,多様である.しかし,その即物的に
は個別にまったく異なる結合状態でも,数学モデルにおいては簡単な操作です
べて画一的に取り扱うことができる.この理解を踏まえて次節から各手法のア
ルゴリズムを解説する.
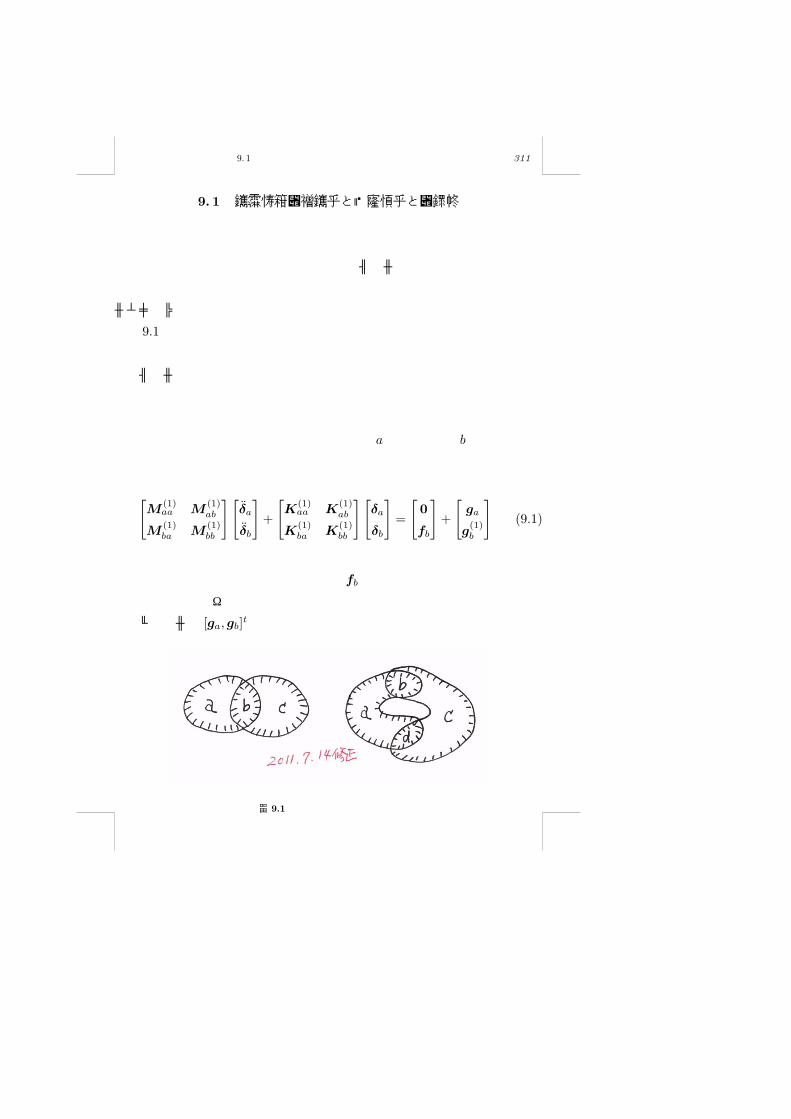
図 9.1に描く2例について考える.まず,左側の2つの部分構造の結合系に
ついて考える.その左側の部分構造を部分構造1番と番号付けする.有限要素
法でモデル化して剛性行列と質量行列を作成するときに有限要素の節点番号の
付け方を自由勝手にしてしまうとそれに従って結合領域内に配置された節点に
対応する自由度成分が収まる行と列も自由勝手な状態になってしまう.しかし,
たとえそのようにしてしまっても,内部領域を a,結合領域を bと表すように
節点自由度の行列内配置順序を数学的に行と列の入れ換え操作で行えば,
[M
(1)aa M
(1)ab
M(1)ba M
(1)bb
][δa
δb
]+
[K
(1)aa K
(1)ab
K(1)ba K
(1)bb
][δa
δb
]=
[0
fb
]+
[ga
g(1)b
](9.1)
のように,部分構造の内部領域自由度を前に,結合領域自由度を後に配置する
ことができる.なお,ここで右辺第1項の fbは2つの部分構造の結合部分で発
生する内力(作用・反作用力)の相手側部分構造から与えられる力を表し,第
2項ベクトルの [ga, gb]t は純粋に与えられる外力を表す.
図 9.1 2個の部分構造の結合例
312 9. 部分構造合成法(大熊政明@Copyright2006)
右側の部分構造を2番と番号付けして同様に考えれば,
[M
(2)cc M
(2)cb
M(2)bc M
(2)bb
][δc
δb
]+
[K
(2)cc K
(2)cb
K(2)bc K
(2)bb
] [δc
δb
]=
[0
−fb
]+
[gc
g(2)b
](9.2)
と表現できる.こうすれば,これら2つの部分構造の結合系の運動方程式は,
それぞれまとまった結合領域自由度部分を重ね合わせる操作で作成できる.す
なわち,
M(1)aa M
(1)ab 0
M(1)ba M
(1)bb + M
(2)bb M
(2)bc
0 M(2)cb M
(2)cc
δa
δb
δc
+
K(1)aa K
(1)ab 0
K(1)ba K
(1)bb + K
(2)bb K
(2)bc
0 K(2)cb K
(2)cc
δa
δb
δc
=
ga
g(1)b + g
(2)b
gc
(9.3)
のとおりである.
図 9.1の右側の結合系については,その左側部分構造(1番と番号付け)に
ついて内部領域を a,2か所に分かれている結合領域を bと dと区分して,質
量行列と剛性行列の節点自由度順序を a,b,dの順に配置すると,
M(1)aa M
(1)ab M
(1)ad
M(1)ba M
(1)bb 0
M(1)da 0 M
(1)dd
δa
δb
δd
+
K(1)aa K
(1)ab K
(1)ad
K(1)ba K
(1)bb 0
K(1)da 0 K
(1)dd
δa
δb
δd
=
0
fb
fd
+
ga
g(1)b
g(1)d
(9.4)
と表せる.なお,2つの結合領域 bと dは隣接していないので,質量行列と剛性
行列中で領域 bと d の連成を表す非対角成分領域は部分ゼロ行列となっている.
9. 1 部分構造の内部領域と結合領域の表現 313
同様に,右側の部分構造については
M(2)bb M
(2)bc 0
M(2)cb M
(2)cc M
(2)cd
0 M(2)dc M
(2)dd
δb
δc
δd
+
K(2)bb K
(2)bc 0
K(2)cb K
(2)cc K
(2)cd
0 K(2)dc K
(2)dd
δb
δc
δd
=
−fb
0
−fd
+
g(2)b
gc
g(2)d
(9.5)
である.なお,ここでも2か所の結合領域は隣接していないので,左辺行列中
に部分ぜろ行列領域が存在する.右辺第1項は,部分構造1番から与えられる
内力である.作用反作用の法則に基づいて式(9.4)と整合性をとり,マイナス
符号が付く.
式(9.4)と(9.5)を結合領域について重ねあわせるとその結合系の運動方
程式が簡単に得られる.すなわち,
M(1)aa M
(1)ab 0 M
(1)ad
M(1)ba M
(1)bb + M
(2)bb M
(2)bc 0
0 M(2)cb M
(2)cc M
(2)cd
M(1)da 0 M
(2)dc M
(1)dd + M
(2)dd
δa
δb
δc
δd
+
K(1)aa K
(1)ab 0 K
(1)ad
K(1)ba K
(1)bb + K
(2)bb K
(2)bc 0
0 K(2)cb K
(2)cc K
(2)cd
K(1)da 0 K
(2)dc K
(1)dd + K
(2)dd
δa
δb
δc
δd
=
ga
g(1)b + g
(2)b
gc
g(1)d + g
(2)d
(9.6)
である.
これらの簡単な例でわかるように,画一的に各部分構造についてはその内部
領域自由度と隣接結合対象部分構造との結合領域自由度を自由度の前と後の成
分にまとめて表現できる.
314 9. 部分構造合成法(大熊政明@Copyright2006)
9. 2 拘束モード型合成法(一重合成法)
もっとも単純な例として図 9.1の左側の2つの部分構造からなる結合系につ
いて,Guyanの静縮小による拘束モード型合成法を解説する.
9. 2. 1 モード合成座標系での運動方程式導出
まず,各部分構造単体についての解析処理を行う.左側の部分構造(1番と
ナンバリング)について,右側の部分構造(2番)との結合領域を完全固定と
した境界条件での固有値問題
K(1)aa φ = λM (1)
aa φ (9.7)
を解き,1次から適当な p次までの固有角振動数 Ω1(1) ∼ Ωp(1) と固有モード
φ1(1) ∼ φp(1) を求める.固有モードは質量行列について正規化したものとし,
それらを次数の昇べき順に列にまとめて固有モード行列 Φ(1) で表すことにす
る.なお,この部分構造の内部領域自由度を n(1)とする.一般論として n(1)は
かなり大きな自由度であり,固有値解析で求める次数はそれに対して大幅に小
さい状態となる.すなわち,p ¿ n(1) となる.
次に,剛性行列と質量行列について,その内部領域自由度を Guyanの静縮
小で結合自由度のみ縮小する.静解析の式として
[K
(1)aa K
(1)ab
K(1)ba K
(1)bb
] [δa
δb
]=
[0
fb
]+
[ga
gb
](9.8)
より,
[K
(1)aa K
(1)ab
] [δa
δb
]= 0 + ga (9.9)
から

9. 2 拘束モード型合成法(一重合成法) 315
δa = − K(1)aa
−1K
(1)ab δb + K(1)
aa
−1ga = Tab(1)δb + K(1)
aa
−1ga (9.10)
を得るので,結合領域の変位による内部領域の変位は
δa = Tab(1)δb (9.11)
表現できる.そこで,結合領域の変位の従属成分だけの内部領域自由度の変位
を考えれば,部分構造1番の変位ベクトルは
[δa
δb
]=
[Tab(1)
I
]δb (9.12)
と表現できるので,この部分構造の剛性行列と質量行列をそれぞれ
K(1) =
[Tab(1)
I
]t [K
(1)aa K
(1)ab
K(1)ba K
(1)bb
][Tab(1)
I
]
= K(1)bb + K
(1)ba Tab(1) + T t
ab(1)K(1)ab + T t
ab(1)K(1)aa Tab(1)
= K(1)bb + K
(1)ba Tab(1)
(9.13)
M(1) =
[Tab(1)
I
]t [M
(1)aa M
(1)ab
M(1)ba M
(1)bb
][Tab(1)
I
]
= M(1)bb + M
(1)ba Tab(1) + T t
ab(1)M(1)ab + T t
ab(1)M(1)aa Tab(1)
(9.14)
のように結合領域自由度のみの剛性行列 K(1)と質量行列 M(1)を導出する.加
えて,後述の式(9.27)を構成するときに使うために,
M (1)aa Tab(1) + M
(1)ab (9.15)
を計算しておく.
解析目的である結合系全体の振動変位に関して,この部分構造についての変
位は,結合領域が変位・変形すればそれに影響されて内部領域も変位・変形す
316 9. 部分構造合成法(大熊政明@Copyright2006)
るはずである.内部領域は,この従属的な変位・変形に加えて,内部領域自体
の自由度による変位・変形も発生するはずである.この後者の内部領域自由度
の変位・変形成分は,式(9.7)の解析で得た固有モードの線形結合で近似表現
できると仮定する.そこで,この部分構造の任意の変位を
[δa
δb
]=
[Tab(1) Φ(1)
I 0
][δb
η(1)
](9.16)
と表現する.ここで,η(1) は固有モード行列 Φ(1) の線形結合係数を成分とす
るベクトル(自由度 p)である.
右側の部分構造に関しても同様に解析処理できる.すなわち,結合領域を完
全拘束した境界条件で内部領域自由度についての固有値問題
K(2)cc φ = λM (2)
cc φ (9.17)
を解き,1次から適当な q 次までの固有角振動数 Ω1(2) ∼ Ωq(2) と固有モード
φ1(2) ∼ φq(2) を求める.固有モードについては質量行列について正規化したも
のとしてそれらを次数の昇べき順に列に配置した固有モード行列を Φ(2) と表
現する.この部分構造の内部領域自由度を n(2) とする.一般論として n(2) は
かなり大きな自由度であり,固有値解析で求める次数はそれに対して大幅に小
さい状態となる.すなわち,q ¿ n(2) となる.
Guyanの静縮小行列 Tcb(2) = − K(2)cc
−1K
(2)cb を求めて,これを利用して結
行領域自由度だけの剛性行列と質量行列を
K(2) =
[Tcb(2)
I
]t [K
(2)cc K
(2)cb
K(2)bc K
(2)bb
][Tcb(2)
I
]
= K(2)bb + K
(2)bc Tcb(2) (9.18)
M(2) =
[Tcb(2)
I
]t [M
(2)cc M
(2)cb
M(2)bc M
(2)bb
][Tcb(2)
I
]
= M(2)bb + M
(2)bc Tcb(2) + T t
cb(2)M(2)cb + T t
cb(2)M(2)cc Tcb(2) (9.19)
9. 2 拘束モード型合成法(一重合成法) 317
と計算する.加えて,後述の式(9.27)を構成するときに使うために,
M (2)cc Tcb(2) + M
(2)cb (9.20)
を計算しておく.
結合系全体の解析目的である振動変位について,この部分構造の部分の変位を
[δc
δb
]=
[Tcb(2) Φ(2)
I 0
][δb
η(2)
](9.21)
と表現する.ここで,η(2) は固有モード行列 Φ(2) の線形結合係数を成分とす
るベクトル(自由度 q)である.
各部分構造についての解析処理は以上で完了したので,それらの部分構造の情
報を使ってのモード合成によって結合系の運動方程式の導出をする段階となる.
実際にコンピュータでこの合成法を実行する際には次の数式演算(換言すれ
ばプログラム)は必要が無いが,理論説明のために記述する.
この結合系全体の運動方程式を素直に物理座標上で記述すれば
M(1)aa M
(1)ab 0
M(1)ba M
(1)bb + M
(2)bb M
(2)bc
0 M(2)cb M
(2)cc
δa
δb
δc
+
K(1)aa K
(1)ab 0
K(1)ba K
(1)bb + M
(2)bb K
(2)bc
0 K(2)cb K
(2)cc
δa
δb
δc
=
ga
gb
gc
(9.22)
となる.ここで,右辺は純粋な外力ベクトルである.左辺の変位(加速度)ベ
クトルは各部分構造についてすでに求めている変位・変形ベクトルから
δa
δb
δc
=
Tab(1) Φ(1) 0
I 0 0
T(2) 0 Φ(2)
δb
η(1)
η(2)
(9.23)

318 9. 部分構造合成法(大熊政明@Copyright2006)
と表現できる(モード合成法なのでこのように設定している).この式では,結
合領域の変位の表現がまだ物理座標上の変位ベクトル δbのままであるので,こ
の変位についても適当な数少ない次数の固有モードの線形結合で表現すること
で,自由度をさらに小さくすることを考える.
各部分構造について結行領域自由度だけの剛性行列と質量行列が Guyanの
静縮小法によって式(9.13),(9.14),(9.18)および(9.19)のように求まって
いるので,重ねあわせの原理に基づいて結合領域自由度だけの構造部分につい
ての
(K(1) + K(2)
)ψb = λ
(M(2) + M(2)
)ψb (9.24)
の固有値解析で,1次から適当な次数の r次までの固有角振動数Ω1(b) ∼ Ωr(b)
と固有モード ψ1(b) ∼ ψr(b) を求める.固有モードについては質量行列につい
て正規化したものとしてそれらを次数の昇べき順に列に配置した固有モード行
列をΨ(b)と表現する.rの値は,結合領域自由度数より大幅に小さく設定でき
る.こうして得られた固有モードの線形結合で結合領域の変位を δb = Ψ(b)ηb
と近似表現する.この表現によって式(9.23)は
δa
δb
δc
=
T(1)Ψ(b) Φ(1) 0
Ψ(b) 0 0
T(2)Ψ(b) 0 Φ(2)
ηb
η(1)
η(2)
(9.25)
と変形できる.この式と時間での2階微分の加速度ベクトルを運動方程式(9.22)
に代入し,両辺に左側からこの式の右辺係数行列の転置行列である
T(1)Ψ(b) Φ(1) 0
Ψ(b) 0 0
T(2)Ψ(b) 0 Φ(2)
t
(9.26)
を乗じて展開し,モード解析の理論の基本特性である‘ 固有モードの直交性 ’
と‘ 質量行列に関しての固有モードの正規化 ’および‘ レイリー商と固有角振
動数の2乗の関係 ’を適用すると,結局,式(9.22)の運動方程式はモード座
9. 2 拘束モード型合成法(一重合成法) 319
標上で
Irr sym.
Φt(1)
(M
(1)aa T(1) + M
(1)ab
)Ψ(b) Ipp
Φt(2)
(M
(2)cc T(2) + M
(2)cb
)Ψ(b) 0 Iqq
ηb
η(1)
η(2)
+
Ω2
rr sym.
0 Ω2pp
0 0 Ω2qq
ηb
η(1)
η(2)
=
Ψt
(b)
(gb + T t
(1)ga + T t(2)gb
)
Φt(1)ga
Φt(2)gc
(9.27)
となる.ここで,sym.はその行列の上三角成分は下三角成分の転置で作れる
ことを示す.すなわち,その行列は対称行列 (symmetric matrix)であること
を示す.Ω2pp はそれぞれ部分構造1番の内部領域の固有値問題で得た固有角振
動数の二乗値を対角成分に次数昇べき順に並べた対角行列である.同様にΩ2qq
は部分構造2番に関する内部領域の固有値問題で得た固有角振動数の二乗値を
対角成分に次数昇べき順に並べた対角行列.Ω2rr は式(9.24)の固有値問題で
得た固有角振動数の二乗値を並べた対角行列である.Irr,Ippおよび Iqq はそれ
ぞれ自由度 r,p,q の単位行列(質量行列に関して正規化した固有モードによる
モード質量行列は単位行列だから)である.
式(9.27)は,自由度が採用固有モード数の合計 r + p + q であり,物理座
標系上での元々の運動方程式の自由度より大幅に小さくできる.また,モード
座標上の質量行列と剛性行列である左辺の2つの係数行列は各部分構造につい
て解析した前段結果と結合領域のみについて解析した結果を簡単な計算で組み
込んで作り上げることができる.基本的特徴としては,
1)剛性行列は結合領域および各部分構造内部領域に関する固有値解析で得た
固有値(固有角振動の二乗)が対角成分を対角に並べた対角行列である.
2)質量行列は結合領域自由度(ここでは下添字 bで表現することとする)と
第 i番の部分構造内部領域自由度(ここでは下添字 aで表現することとす

320 9. 部分構造合成法(大熊政明@Copyright2006)
る)との連成を示す非対角部分行列部分がΦt(i)
(M
(i)aa T(i) + M
(i)ab
)Ψ(b)
で作成される.
したがって,部分構造が3つ以上の場合には質量行列と剛性行列の成分部分
行列は
Irr sym.
Φt(1)
(M
(1)aa T(1) + M
(1)ab
)Ψ(b) Ipp
Φt(2)
(M
(2)cc T(2) + M
(2)cb
)Ψ(b) 0 Iqq(2)
......
. . . . . .
Φt(i)
(M
(i)aa T(2) + M
(i)ab
)Ψ(b) 0 · · · 0 Iqq(i)
......
......
. . . . . .
Ω2rr sym.
0 Ω2(1)
0 0 Ω2(2)
......
. . . . . .
0 0 · · · 0 Ω2(i)
......
......
. . . . . .
(9.28)
のとおりの画一的なパターンとなる.これは汎用プログラム作成に好都合である.
したがって,結合系構造物の自由度が大規模な場合,すなわち式(9.22)の
自由度が大規模な場合,コンピュータのメモリーと解析速度の点で有利となる.
この例は部分構造が2つだけであるが,実用的にもっと多くの部分構造から成
る構造物(または大型複雑な構造物を多くの部分構造の結合系としてモデル化
する)の場合にはその有利性が発揮される(効率化率はプログラミング技術に
もよるが).
9. 2. 2 各種の振動解析
式(9.27)が構築できたので,自在に各種解析ができる.ここでは基本的な
振動解析方法を解説する.

9. 2 拘束モード型合成法(一重合成法) 321
a.固有値解析
固有振動数と固有モード形は固有値解析で求めることができる.
Ω2
rr sym.
0 Ω2pp
0 0 Ω2qq
ηb
η(1)
η(2)
= λ
Irr sym.
Φt(1)
(M
(1)aa T(1) + M
(1)ab
)Ψ(b) Ipp
Φt(2)
(M
(2)aa T(2) + M
(2)ac
)Ψ(b) 0 Iqq
ηb
η(1)
η(2)
(9.29)
の固有値問題を解いて,固有値 λを求めれば, 12π
√λが固有角振動数である.
固有モードは,この固有値問題で固有値と共に得られた固有ベクトルの部分ベ
クトル ηb,η(1) および η(2) を式(9.25)に代入して計算することで求めること
ができる.
b.外力の入力による振動応答解析
外力を入力データとして与えてその時の構造物の振動応答を求めたい場合に
は,外力ベクトル,ga,gb,gcを設定して式(9.27)を解けばよい.ただし,強
制振動解析の場合には不減衰系で解くよりも,適切および適宜に減衰行列を設
定して解析することとなる場合が多いであろう.そのような場合に減衰行列の
便宜的な作成法としては,各部分構造内部領域の振動のモード減衰と,結合領
域の固有振動に対応するモード減衰比として経験等に基づく適切な値を設定し,
剛性行列と形式が同じ対角行列を与えればよい.すなわち,例えば式(9.27)に
対応させる減衰行列C としては,モード減衰比を対角成分とした対角行列を ζ
で表して,
C =
ζrr sym.
0 ζpp
0 0 ζqq
(9.30)
の形式の行列である.または‘比例減衰’(C = αM +βK)の概念に基づけば,
322 9. 部分構造合成法(大熊政明@Copyright2006)
C = α
Irr sym.
Φt(1)
(M
(1)aa T(1) + M
(1)ab
)Ψ(b) Ipp
Φt(2)
(M
(2)cc T(2) + M
(2)cb
)Ψ(b) 0 Iqq
+β
Ωrr sym.
0 Ωpp
0 0 Ωqq
(9.31)
のスカラー係数 αと β の値を適切に設定して減衰行列を作成すればよい.
式(9.27)はモード合成法による運動方程式であり,既述のとおりに採用モー
ド数の自由度の運動方程式であり,元々の物理座標系での運動方程式の自由度
に比べれば大幅に小さいものである.そこで,直接解析することも現在のコン
ピュータ能力であれば実用的に可能である場合も多いと考えられる.しかし,
この方程式についても“モード解析”を適用することができ,計算効率を上げ
ることはできる.
c.変位の入力による振動応答解析
力は力学において第2次概念であるから,実用的には外力を与えて解析でき
る場合は必ずしも多くはない.たとえば図 9.2のように,本例題の2部分構造
からなる結合系をビルディングと想定してみよう.地震によって地面(地盤)
が震動してビルが揺れるわけであるが,地面からそのビルディングに加わる外
力は未知である.ビルの基礎の近傍の地面の振動加速度は直接計測できるので,
ビルの振動解析にはこの地面の振動加速度を与えることで解析することが実用
的である.すなわち,地面に固定されているビルの基礎部分は地面の震動と同
じ変位・速度・加速度で振動すると仮定して‘ 変位加振 ’による強制振動解析
として解析する.
図 9.2の例について,変位加振の応答解析の方法の基本を学習する.部分構
造1番について,地面の変位に一致して強制的に‘ 変位 ’入力する自由度を a
で表し,その上部となる内部領域を aと区分しよう.部分構造2番との結合領
域自由度と強制変位自由度 aとは直接隣接していない場合を考える.部分構造
1番の運動方程式は
9. 2 拘束モード型合成法(一重合成法) 323
図 9.2 ビルディングと想定しての変位加振応答解析の例
M(1)aa M
(1)aa M
(1)ab
M(1)aa M
(1)aa M
(1)ab
M(1)ba M
(1)ba M
(1)bb
δa
δa
δb
+
K(1)aa K
(1)aa K
(1)ab
K(1)aa K
(1)aa K
(1)ab
K(1)ba K
(1)ba K
(1)bb
δa
δa
δb
=
ga
0
fc
(9.32)
と記述できる.ここで便宜的に,地面からの外力(未知の値)を ga で,部分
構造2番から結合領域自由度に与えられる力(構造物内力,未知の値)を fcで
表している.なお,構造の図から,aと bで表す自由度領域は直接結合してい
ないので,実際にはM(1)ba = M
(1)ab
t= 0, K
(1)ba = K
(1)ab
t= 0である.
地面の変位が入力値として与えられる本例では,δa とその加速度 δa が既知
入力値として与えられ,地面から与えられる力ベクトル gaが未知数となる.こ
のことより式(9.32)は
M(1)aa M
(1)ab
M(1)aa M
(1)ab
M(1)ba M
(1)bb
[δa
δb
]+
K(1)aa K
(1)ab
K(1)aa K
(1)ab
K(1)ba K
(1)bb
[δa
δb
]−
ga
0
0
=
0
0
fc
−
M(1)aa
M(1)aa
M(1)ba
δa −
K(1)aa
K(1)aa
K(1)ba
δa
(9.33)
と変形できる.地面から構造物に与える加振力 gaは一般的に求める必要(関心)

324 9. 部分構造合成法(大熊政明@Copyright2006)
はないので,解くべき方程式は,下3分の2の連立方程式となる.すなわち,
[M
(1)aa M
(1)ab
M(1)ba M
(1)bb
] [δa
δb
]+
[K
(1)aa K
(1)ab
K(1)ba K
(1)bb
][δa
δb
]
=
[0
fc
]−
[M
(1)aa
M(1)ba
]δa −
[K
(1)aa
K(1)ba
]δa
(9.34)
となる.右辺第1項の部分構造2番からの力は内力なので,部分構造合成のア
ルゴリズム中で2つの部分構造の結合によって‘ 作用・反作用の法則 ’で相殺
消去されるので,地面の強制変位に直接起因してこの部分構造に作用する外力
は右辺第2項と第3項である.そこで,式(9.27)の外力ベクトルの純粋内部
領域自由度 aの成分(ベクトル)と地面に接して強制変位を入力される自由度
aに区分して
ga
ga
gb
= −
0
M(1)aa
M(1)ba
δa −
0
K(1)aa
K(1)ba
δa (9.35)
のとおりに変位加振による運動方程式に入力する外力を導出して,運動方程式
を解析すればよい.なお,ここで,実際には,M(1)ba = 0,K
(1)ba = 0である
から,
ga = −M(1)aa δa −K
(1)aa δa (9.36)
である.部分構造合成法での部分構造1番の質量行列と剛性行列は式(9.34)の
左辺に示す係数行列であり,地面固定境界条件での剛性行列と質量行列である.
9. 3 拘束モード型合成法(多重合成法)
前節の一重合成法でも,解析対象物全体(全系と呼ぶことにする)を素直に
一体構造物として有限要素法で解くよりは,必要コンピュータメモリー量の低
減,計算時間の短縮,特に構造物のほんの一部分のモデル化を変更した場合の
9. 3 拘束モード型合成法(多重合成法) 325
図 9.3 二重合成法例示解説のための構造系
再計算の効率化,部分構造毎に有限要素モデルを作成しての部分構造解析の独
立・並行作業化,などで優位性を出せる.しかし,部分構造の数が多くなるに
つれて,必然的に結合領域の自由度も増加していくのでコンピュータの必要メ
モリー量,計算時間の指数関数的増大(自由度に対しておおよそ 2.7乗程度)
がある.そこで,考えられる工夫のひとつが合成の多重化である.
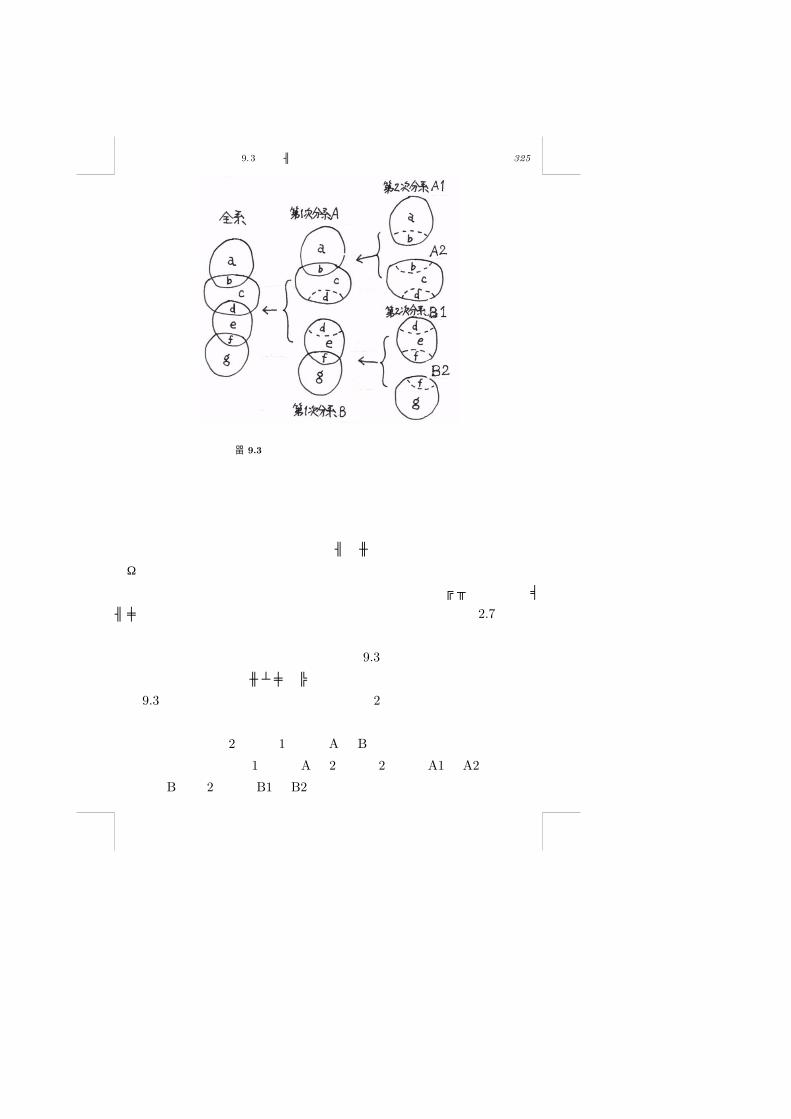
ここでは,理解しやすいように具体的に図 9.3の模式図の構造物についての
二重合成法についてのアルゴリズムを解説する.
図 9.3において,解析対象構造物(全系)を 2重に部分構造に分解していく
と考えると,左から右への流れでみる.すなわち,全系をまず第1段目の部分
構造への分解として 2つの第 1次分系 Aと Bに分ける.さらに第2段目の部
分構造への分解として第 1次分系 Aは 2つの第 2次分系 A1と A2に分け,第
1次分系 Bは第 2次分系 B1と B2に分ける.部分構造合成解析の観点からは
右から左への合成の流れとなる.
326 9. 部分構造合成法(大熊政明@Copyright2006)
9. 3. 1 一重目合成解析
一重目の合成解析は,第2次分系 A1と A2の結合系である第1次分系 Aの
解析と,第2次分系 B1と B2の結合による第1次分系 Bの解析である.それ
ぞれは独立に,かつ,まったく同等なアルゴリズムで解析できる.
a.第2次分系A1とA2の解析処理
まず,第2次分系 A1についての解析処理である.解析開始において認識す
べきことは,この分系は内部領域 aと結合領域 bで構成され,その結合領域 b
は一重目の合成解析終了時点では第1次分系Aにおける内部領域 a,b,cの領
域の一部になるということである.そこで,この第2次分系 A1は,この一重
目での解析処理において,結合領域 bを固定した状態での内部領域 aの固有値
解析で1次からある適切な次数(ここでは pa 次とする)までの固有角振動数
と固有モードを求める演算と,結合領域 bに剛性行列と質量行列の自由度を縮
小する演算が行われる.
この分系の運動方程式は,結合領域 bの自由度で分系 A2から作用する内力
を fb(この分系からみれば外力),純粋な外力を [gta, gt
b]t すると
[M
(A1)aa M
(A1)ab
M(A1)ba M
(A1)bb
] [δa
δb
]+
[K
(A1)aa K
(A1)ab
K(A1)ba K
(A1)bb
][δa
δb
]=
[0
fb
]+
[ga
gb
](9.37)
と表現できるので,まずは,結合領域 bを固定した状態での内部領域 aの固有
値解析を行う.固有値問題は
K(A1)aa φ = λM (A1)
aa φ (9.38)
である.求められた1次から pa次までの固有角振動数の2乗を対角成分に順に
配置した固有値行列をΛ(1)a ,固有モードを各列に並べた固有モード行列をΦ(1)
a
と表す.なお,ここに限らず固有モードは固有値解析において質量行列に関し
て正規化して得られるものとする.
つぎは,剛性行列と質量行列を結合領域に自由度縮小する演算操作である.結
合領域の変位に従属する内部領域までの変位ベクトルは,式(9.8)から(9.12)
の導出と同じように行うことで,グヤンの静縮小行列をTab = −K(A1)aa
−1K
(A1)ab
として
9. 3 拘束モード型合成法(多重合成法) 327
[δa
δb
]=
[Tab
I
]δb (9.39)
と表現できる.これを利用して,分系 A1の剛性行列と質量行列は
K(A1)bb =
[Tab
I
]t [K
(A1)aa K
(A1)ab
K(A1)ba K
(A1)bb
][Tab
I
]
= K(A1)bb + K
(A1)ba Tab (9.40)
M(A1)bb =
[Tab
I
]t [M
(A1)aa M
(A1)ab
M(A1)ba M
(A1)bb
][Tab
I
]
= M(A1)bb + M
(A1)ba Tab + T t
abM(A1)ab + T t
abM(A1)aa Tab (9.41)
の演算で結合領域自由度 bのみの剛性行列 K(A1)bb と質量行列 M
(A1)bb に縮小で
きる.この演算に加えて,後述の式(9.54)を構成するときに使うために,
M(A1)ab = M (A1)
aa Tab + M(A1)ab (9.42)
を計算しておく.
次に,第2次分系 A2についての解析処理である.まず,解析に先立ち認識
すべきことは,この分系は内部領域 cと2か所に分かれている結合領域 bと d
で構成され,その結合領域 bは一重目の合成解析終了後は第1次分系Aにおけ
る内部領域 a,b,cの一部になる領域であること.結合領域 dは二重目の合成
における第1次分系 Aと Bの結合領域となる自由度である点である.そこで,
この段階での第2次分系 A2の解析処理においては結合領域 bと dに剛性行列
と質量行列の自由度を縮小し,結合領域 dの自由度は固定境界条件として分系
A1と A2の合成解析処理に進む.
さて,結合領域 bに分系 A1から作用する内力(反作用力)を −fb と表し,
結合領域 dに分系B1から受ける内力を fdとし,他の純粋な外力を [gc, gb, gd]t
すると,この分系の運動方程式は,
328 9. 部分構造合成法(大熊政明@Copyright2006)
M(A2)cc M
(A2)cb M
(A2)cd
M(A2)bc M
(A2)bb M
(A2)bd
M(A2)dc M
(A2)db M
(A2)dd
δc
δb
δd
+
K(A2)cc K
(A2)cb K
(A2)cd
K(A2)bc K
(A2)bb K
(A2)bd
K(A2)dc K
(A2)db K
(A2)dd
δc
δb
δd
=
0
fb
fd
+
gc
gb
gd
(9.43)
と表されるので,内部領域についての固有値問題
K(A2)cc φ = λM (A2)
cc φ (9.44)
を解く.求められた1次から pc次までの固有値(固有角振動数の2乗)を対角
成分に順に配置した固有値行列をΛ(1)c ,固有モードを各列に並べた固有モード
行列をΦ(1)c と表す.
この部分構造をグヤンの静縮小によって結合領域自由度 bと dのみの剛性行
列と質量行列を導出する.すなわち,それらは自由度縮小変換式が
δ(A2)c
δ(A2)b
δ(A2)d
=
−K−1
cc Kcb −K−1cc Kcd
I 0
0 I
[δb
δd
]=
Tcb Tcd
I 0
0 I
[δb
δd
](9.45)
と表現されるので,
9. 3 拘束モード型合成法(多重合成法) 329
[K
(A2)bb K
(A2)bd
K(A2)db K
(A2)dd
]
=
Tcb Tcd
I 0
0 I
t
K(A2)cc K
(A2)cb K
(A2)cd
K(A2)bc K
(A2)bb K
(A2)bd
K(A2)dc K
(A2)db K
(A2)dd
Tcb Tcd
I 0
0 I
=
[K
(A2)bb K
(A2)bd
K(A2)db K
(A2)dd
]+
[K
(A2)bc
K(A2)dc
] [Tcb Tcd
](9.46)
[M
(A2)bb M
(A2)bd
M(A2)db M
(A2)dd
]
=
Tcb Tcd
I 0
0 I
t
M(A2)cc M
(A2)cb M
(A2)cd
M(A2)bc M
(A2)bb M
(A2)bd
M(A2)dc M
(A2)db M
(A2)dd
Tcb Tcd
I 0
0 I
=
[M
(A2)bb M
(A2)bd
M(A2)db M
(A2)dd
]+
[M
(A2)bc
M(A2)dc
] [Tcb Tcd
]
+
[T t
cb
T tcd
] [M
(A2)cb M
(A2)cd
]+
[T t
cb
T tcd
]M (A2)
cc
[Tcb Tcd
](9.47)
の演算で求められる.
最後に,第2次分系 A1についての式(9.42)と同様に,分系 A2について
の式として
M(A2)cbd =
[M
(A2)cb M
(A2)cd
]
=[M
(A2)cc Tcb + M
(A2)cb M
(A2)cc Tcd + M
(A2)cd
] (9.48)
を計算しておく.
b.第1次分系Aの解析処理
第2次分系 A2の結合領域 dを固定境界条件とした場合での A1と A2の結
合系の解析である.まず,先に結合領域の自由度に縮小した剛性行列と質量行
列を重ねあわせることで,第1次分系Aについて自由度 aと cを縮小消去した
330 9. 部分構造合成法(大熊政明@Copyright2006)
自由度での固有値問題を構成する.すなわち,[K
(A1)bb + K
(A2)bb K
(A2)bd
K(A2)db K
(A2)dd
][φb
φd
]= λ
[M
(A1)bb + M
(A2)bb M
(A2)bd
M(A2)db M
(A2)dd
][φb
φd
]
(9.49)
である.結合領域 dは二重目の合成解析での結合領域となるのでこの時点では
固定条件として,[K
(A1)bb + K
(A2)bb
]φb = λ
[M
(A1)bb + M
(A2)bb
]φb (9.50)
を解いて,モード合成に利用する1次からある次数の適切な p(1)b 次までの固有
モードを求め,その固有モード行列を Φ(1)b ,これに対応する固有値行列を Λ(1)
b
と表すことにする.
以上より,第1次分系Aの全自由度(領域 dは固定)の変位ベクトルを,す
でに求めているモードの重ねあわせで表現する.概念的(実際にはこのような
大きな行列をプログラムしない)には次式のとおりである.
δa
δb
δc
=
TabΦ(1)b Φ(1)
a 0
Φ(1)b 0 0
TcbΦ(1)b 0 Φ(1)
c
ξb
ξa
ξc
(9.51)
第1次分系 Aの全自由度(領域 dは固定)を表現する剛性行列と質量行列を,
やはり概念的に創り上げれば,
K(A1)aa K
(A1)ab 0
K(A1)ba K
(A1)bb + K
(A2)bb K
(A2)bc
0 K(A2)cb K
(A2)cc
M(A1)aa M
(A1)ab 0
M(A1)ba M
(A1)bb + M
(A2)bb M
(A2)bc
0 M(A2)cb M
(A2)cc
(9.52)
となる.そこで,物理座標上での運動方程式を式(9.51)のモード変位場へ座
標変換する.剛性行列と質量行列それぞれに式(9.51)の右辺係数行列を前後
から乗じて2次形式演算をすればよい.すなわち,
9. 3 拘束モード型合成法(多重合成法) 331
TabΦ(1)b Φ(1)
a 0
Φ(1)b 0 0
TcbΦ(1)b 0 Φ(1)
c
t
K(A1)aa K
(A1)ab 0
K(A1)ba K
(A1)bb + K
(A2)bb K
(A2)bc
0 K(A2)cb K
(A2)cc
TabΦ(1)b Φ(1)
a 0
Φ(1)b 0 0
TcbΦ(1)b 0 Φ(1)
c
TabΦ(1)b Φ(1)
a 0
Φ(1)b 0 0
TcbΦ(1)b 0 Φ(1)
c
t
M(A1)aa M
(A1)ab 0
M(A1)ba M
(A1)bb + M
(A2)bb M
(A2)bc
0 M(A2)cb M
(A2)cc
TabΦ(1)b Φ(1)
a 0
Φ(1)b 0 0
TcbΦ(1)b 0 Φ(1)
c
(9.53)
である.実際のプログラミングでは大きな自由度の行列演算になってしまうの
で式(9.53)の演算は行わない.これは理論的に画一形式に展開整理できて,次
式のとおりにモード座標での運動方程式となる.それをプログラム上で作成し
さえすればよい.Λ(1)
b sym.
0 Λ(1)a
0 0 Λ(1)c
ξb
ξa
ξc
+
I sym.
Φ(1)ta M
(A1)ab Φ(1)
b I
Φ(1)tc M
(A2)cb Φ(1)
b 0 I
ξb
ξa
ξc
=
Φ(1)t
b T tabga + Φ(1)t
b gb + Φ(1)tb T t
cbgc
Φ(1)ta ga
Φ(1)tc gc
(9.54)
この方程式の右辺をゼロベクトルとして,第1次分系Aに関して1次から適当
な第 pA 次まで固有値解析でモード空間座標での固有モードと固有値を求める.
固有モードについてはその結果を式(9.51)に代入して
φ(A)a
φ(A)b
φ(A)c
=
TabΦ(1)b Φ(1)
a 0
Φ(1)b 0 0
TcbΦ(1)b 0 Φ(1)
c
ξb
ξa
ξc
(9.55)
のように物理座標上での固有モードを求めておく.固有値については,それら
を対角成分に並べた固有値行列をΛ(1)A とする.
二重目合成解析の段で利用するために
332 9. 部分構造合成法(大熊政明@Copyright2006)
T(A)bd =
[K
(A1)bb + K
(A2)bb
]−1
K(A2)bd (9.56)
M(A)bd =
[M
(A1)bb + M
(A2)bb
] T
(A)bd + M
(A2)db (9.57)
の行列も計算しておく.
c.第2次分系B1とB2の解析処理
第 2次分系 A1と A2の解析処理と同じなので,結論的な点のみを記す.
まず,第 2次分系 B1については,その領域を結合領域 d(二重目の結合領
域),f(一重目の結合領域),内部領域を添え字 eで表すこととして剛性行列
と質量行列は,
K(B1)ee K
(B1)ef K
(B1)ed
K(B1)fe K
(B1)ff K
(B1)fd
K(B1)de K
(B1)df K
(B1)dd
と
M(B1)ee M
(B1)ef M
(B1)ed
M(B1)fe M
(B1)ff M
(B1)fd
M(B1)de M
(B1)df M
(B1)dd
(9.58)
と表せる.
内部領域について結合領域固定の境界条件での固有値解析
K(B1)ee φ = λM (B1)
ee φ (9.59)
を実行し,1次から適当な pe次までの固有値と固有モードを求め,固有値行列
Λ(1)e とΦ(1)
c を作成する.
次に,剛性行列と質量行列を Guyanの静縮小で内部領域 eについて縮小さ
せて,結合領域 dと f のみとなるものにする.すなわち,Guyanの静縮小は
δ(B1)e
δ(B1)f
δ(B1)d
=
−K−1
ee Kef −K−1ee Ked
I 0
0 I
[δf
δd
]=
Tef Ted
I 0
0 I
[δf
δd
](9.60)
によって,式(9.46)と(9.47)と同様に,
9. 3 拘束モード型合成法(多重合成法) 333
[K
(B1)ff K
(B1)fd
K(B1)df K
(B1)dd
]
=
[K
(B1)ff K
(B1)fd
K(B1)df K
(B1)dd
]+
[K
(B1)fe
K(B1)de
] [Tef Ted
](9.61)
[M
(B1)ff M
(B1)fd
M(B1)df M
(B1)dd
]
=
[M
(B1)ff M
(B1)fd
M(B1)df M
(B1)dd
]+
[M
(B1)fe
M(B1)de
] [Tef Ted
]
+
[Tef
Ted
] [M
(B1)ef M
(B1)ed
]+
[T t
ef
T ted
]M (B1)
ee
[Tef Ted
](9.62)
と演算できる.最後に,
M(B1)efd =
[M
(B1)ed M
(B1)fd
]
=[M
(A2)ee Tef + M
(B1)ef M
(A2)ee Ted + M
(B1)ed
] (9.63)
を計算しておく.
分系 B2については,ちょうど分系 A1と同様に,剛性行列と質量行列
[K
(B2)gg K
(B2)gf
K(B2)fg K
(B2)ff
]と
[M
(B2)gg M
(B2)gf
M(B2)fg M
(B2)ff
](9.64)
の作成から始まり,次の計算作業を順不同で実行する.
まず,内部領域に関する固有値解析
K(B2)gg φ = λM (B2)
gg φ (9.65)
によって1次から適当な次数の pg 次までの固有値と固有モードを計算し,固有
値行列Λ(1)g と固有モード行列Φ(1)
g を求める.
次に,グヤンの静縮小行列を Tgf = −K(B2)gg
−1K
(B2)gf と計算して,分系A1
の剛性行列と質量行列を結合自由度のみに縮小する.すなわち,
334 9. 部分構造合成法(大熊政明@Copyright2006)
K(B2)ff =
[Tgf
I
]t [K
(A1)gg K
(A1)gf
K(A1)fg K
(A1)ff
][Tgf
I
]
= K(B2)gg + K
(B2)gf Tgf (9.66)
M(B2)ff =
[Tgf
I
]t [M
(B2)gg M
(B2)gf
M(B2)fg M
(B2)ff
][Tgf
I
]
= M (B2)gg + M
(B2)gf Tgf + T t
gfM(B2)gf + T t
gfM (B2)gg Tgf (9.67)
最後に,
M(B2)gf = M (B2)
gg Tgf + M(B2)gf (9.68)
を計算する.
d.第1次分系Bの解析処理
第2次分系 B1の結合領域 dを固定境界条件とした場合での B1と B2の結
合系の解析である.解析行程は第1次分系 Aについてとまったく同じである.
まず,結合領域 dは二重目の合成解析での結合領域となるので,この時点で
は固定条件として,
[K
(B1)ff + K
(B2)ff
]φf = λ
[M
(B1)ff + M
(B2)ff
]φf (9.69)
の固有値問題を解いて,モード合成に利用する 1 次から適切な p(1)f 次までの
固有値と固有モードを求め,固有値行列を Λ(1)f ,それに対応するモード行列を
Φ(1)f を作成する.
以上より第1次分系 Bの全自由度(領域 dは固定)の変位ベクトルを,すで
に求めているモードの重ねあわせで表現すると次式のとおりである.
δe
δf
δg
=
Tef Φ(1)f Φ(1)
e 0
Φ(1)f 0 0
Tgf Φ(1)f 0 Φ(1)
g
ξf
ξe
ξg
(9.70)
結合領域 dを固定の境界条件での第1次分系 Bの物理座標上での運動方程式を
式(9.70)のモード変位場へ座標変換するには,剛性行列と質量行列それぞれ
に式(9.70)の右辺係数行列を前後から乗じればよい.結果として,これは理
9. 3 拘束モード型合成法(多重合成法) 335
論的に画一的形式に展開整理できて,次式のとおりにモード座標での運動方程
式となる.それをプログラム上で作成しさえすればよい.Λ(1)
f sym.
0 Λ(1)e
0 0 Λ(1)g
ξf
ξe
ξg
+
I sym.
Φ(1)te M
(B1)ef Φ(1)
f I
Φ(1)tg M
(B2)gf Φ(1)
f 0 I
ξf
ξe
ξg
=
Φ(1)t
f T tefge + Φ(1)t
f gf + Φ(1)tf T t
gfgg
Φ(1)te ge
Φ(1)tg gg
(9.71)
この方程式の右辺をゼロベクトルとして,1次から適当な pB 次まで固有値解
析でモード空間座標での固有モードと固有値を求める.固有モードについては
その結果を式(9.70)に代入して
φ(B)e
φ(B)f
φ(B)g
=
Tef Φ(1)f Φ(1)
e 0
Φ(1)f 0 0
Tgf Φ(1)f 0 Φ(1)
g
ξf
ξe
ξg
(9.72)
のように物理座標上での固有モードを求めておく.固有値については,それら
を対角成分に並べた固有値行列をΛ(1)B とする.
二重目合成解析の段で利用するために
T(B)fd =
[K
(B1)ff + K
(B2)ff
]−1
K(B1)fd (9.73)
M(B)fd =
[M
(B1)ff + M
(B2)ff
]T
(B)fd + M
(B2)fb (9.74)
の行列も計算しておく.
9. 3. 2 二重目合成解析
第1次分系 Aについて式(9.49)の左辺の剛性行列と質量行列を結合領域 d
のみの自由度まで Guyanの静縮小で縮小する.Guyanの静縮小行列 Tbd は

336 9. 部分構造合成法(大熊政明@Copyright2006)
Tbd = −(K
(A1)bb + K
(A2)bb
)−1
K(A2)bd (9.75)
で計算でき,結局,
ˆK
(A)dd =
[Tbd
I
]t [K
(A1)bb + K
(A2)bb K
(A2)bd
K(A2)db K
(A2)dd
] [Tbd
I
]
ˆM
(A)dd =
[Tbd
I
]t [M
(A1)bb + M
(A2)bb M
(A2)bd
M(A2)db M
(A2)dd
][Tbd
I
] (9.76)
と縮小できる.
第1次分系 Bについても,第1次分系 Aの解析処理と同様に,Guyanの静
縮小行列を
Tfd = −(K
(B1)ff + K
(B2)ff
)−1
K(B1)fd (9.77)
と計算し,
ˆK
(B)dd =
[I
Tfd
]t [K
(B1)dd K
(B1)df
K(B1)fd K
(B1)ff + K
(B2)ff
][I
Tfd
]
ˆM
(B)dd =
[I
Tfd
]t [M
(B1)dd M
(B1)df
M(B1)fd M
(B1)ff + M
(B2)ff
] [I
Tfd
] (9.78)
を求める.
これらの縮小結果を用いて全系(二重目の合成段階で)の結合領域 dについ
ての固有値問題
[ ˆK
(A)dd + ˆ
K(B)dd
]φd = λ
[ ˆM
(A)dd + ˆ
M(B)dd
]φd (9.79)
を解いて,1次から適切な p(2)d 次までの固有値と固有モードを求め,それぞれ
固有値行列 ˆΛ(2)d と ˆΦ(2)
d の形式で保持する.
これまでに得られた固有モード行列と縮小変換行列を使って全系の変位を次
のように固有モードの重ねあわせで近似表現できることになる.
9. 3 拘束モード型合成法(多重合成法) 337
δa
δb
δc
δd
δe
δf
δg
=
TabTbdˆΦ(2)
d Φ(A)a 0
TbdˆΦ(2)
d Φ(A)b 0
(TcbTbd + Tcd)ˆΦ(2)
d Φ(A)c 0
ˆΦ(2)d 0 0
(TefTfd + Ted)ˆΦ(2)
d 0 Φ(B)e
TfdˆΦ(2)
d 0 Φ(B)f
TgfTfdˆΦ(2)
d 0 Φ(B)g
ξd
ξA
ξB
(9.80)
このモード変換行列によって,全系についての物理座標上での剛性行列と質量
行列(これらは大自由度で実際にはプログラム上で作成しない)をモード座標
空間へ変換する.この変換行程を手計算で行うとかなりやっかいな作業となる
が,結論として全系についてのモード空間座標上での固有値問題は式のように
つくり上げることができる.
ˆΛ(2)d sym.
0 Λ(1)A
0 0 Λ(1)B
ξd
ξA
ξB
= λ
Id sym.
M(2)Ad IA
M(2)Bd 0 IB
ξd
ξA
ξB
(9.81)
ここで,Id,IAおよび IB はすべて単位行列であり,大きさはそれぞれに対応
する剛性行列中の固有値行列に一致する.sym.は対称行列を表す記号である.
非対角部分行列のM(2)Ad とM
(2)Bd は
M(2)Ad =Φ(A)t
a M(A1)ab Tbd
ˆΦ(2)d
+ Φ(A)tb M
(A)bd
ˆΦ(2)d
+ Φ(A)tc
[M
(A2)cb Tbd + M
(A2)cd
] ˆΦ(2)d
(9.82)
M(2)Bd =Φ(A)t
e
[M
(B1)ef Tfd + M
(B1)ed
] ˆΦ(2)d
+ Φ(B)tf M
(B)fd
ˆΦ(2)d
+ Φ(B)tg M
(B2)gf Tfd
ˆΦ(2)d
(9.83)
で演算導出される.式(9.81)の固有値問題を解けば,その固有値から全系の

338 9. 部分構造合成法(大熊政明@Copyright2006)
固有振動数を得られ,固有モード形はその固有ベクトルを式(9.80)に代入演
算することで求められる.演算は領域 a,b,c…毎に区分して比較的小さな行
列演算で実行すればよい.
9. 4 拘束モード型合成法(逐次合成法)
本手法は,図 9.4に示す4つの部分構造の結合系のように,3つ以上の複数
の部分構造からなる結合系(全系)の解析を,まず基本の2つの部分構造の結
合系について拘束モード型で解き,その特性(固有角振動数,固有モード)を
求め,その次に3番目の部分構造物が結合される3つの部分構造からなる系の
解析を同じく拘束モード合成法で解析する.その結果を利用して,4番目の部
分構造がさらに結合される系について解く,というように逐次部分構造を1つ
ずつ結合していき,最終的に全系に関する運動方程式を構築して目的の振動解
析をしようとするものである.ここでは帰納法的説明として図の4つの部分構
造からなる結合系を例にアルゴリズムを解説する.この例についての理解から
読者諸兄は一般化(汎用化)を考えてほしい.
9. 4. 1 第1段目の合成解析
部分構造1番と2番の結合系についての解析である.
まず,部分構造1番について演算処理する.剛性行列と質量行列,すなわち,
[K
(1)aa K
(1)ab
K(1)ba K
(1)bb
]
[M
(1)aa M
(1)ab
M(1)ba M
(1)bb
]
(9.84)
を作成して,次の計算を行う.
1)結合領域 bを固定した内部領域についての固有値解析
K(1)aa φ = λK(1)
aa φ (9.85)

9. 4 拘束モード型合成法(逐次合成法) 339
図 9.4 逐次多重合成法解説のための4部分構造系
340 9. 部分構造合成法(大熊政明@Copyright2006)
で 1次から適切な p(1)次までの固有角振動数 Ω1(1) ∼ Ωp(1) と固有モー
ド φ1(1) ∼ φp(1) を計算する.固有モードを次数の昇べき順に列に並べ
た行列をΦ(1) と表す.
2)Guyanの静縮小によって,式(9.13)と(9.14)の通りに両特性行列を
結合領域自由度 bへ縮退させる.
Guyanの静縮小行列 Tab は
Tab = − K(1)aa
−1K
(1)ab (9.86)
で計算し,それによって縮退させた特性行列ˆ
K(1)bb と
ˆM
(1)bb は,
Kbb = K(1)bb + K
(1)ba Tab
Mbb = M(1)bb + M
(1)ba Tab + T t
abM(1)ab + T t
abM(1)aa Tab
(9.87)
と計算する.
3)モード座標上での運動方程式での質量連成行列(非対角部分に配置され
る部分行列)
Z(1)ab = M (1)
aa Tab + M(1)ab (9.88)
を計算する.
次に,部分構造2番の剛性行列と質量行列を作成する.剛性行列と質量行列
K(2)bb K
(2)bc K
(2)bd
K(2)cb K
(2)cc K
(2)cd
K(2)db K
(2)dc K
(2)dd
M(2)bb M
(2)bc M
(2)bd
M(2)cb M
(2)cc M
(2)cd
M(2)db M
(2)dc M
(2)dd
(9.89)
を作成して次の演算を行う.なお,図 9.4に示すように,この部分構造2番の

9. 4 拘束モード型合成法(逐次合成法) 341
結合領域 dは第2段目の合成解析で部分構造3番と結合する自由度であるから,
現段階では固定条件が設定される自由度とすることを認識しておく.
1)結合領域 bと dを固定した内部領域についての固有値問題
K(2)cc φ = λM (2)
cc φ (9.90)
を解き,1次から適切な p(2)次までの固有角振動数 Ω1(2) ∼ Ωp(2) と固
有モード φ1(2) ∼ φp(2) を計算する.固有モードを次数の昇べき順に列
に並べた行列をΦ(2) と表す.
2)Guyanの静縮小によって,両特性行列を結合領域自由度 bと dへ縮退さ
せる.
静縮小行列は結合領域 bへの縮小行列と dへの縮小行列から成り,
δ(2)c = − K(2)
cc
−1K
(2)cb δ
(2)b − K(2)
cc
−1K
(2)cd δ
(2)d
↓
δb
δc
δd
=
I 0
Tcb Tcd
0 I
[δb
δd
]
↓Tcb = − K(2)
cc
−1K
(2)cb
Tcd = − K(2)cc
−1K
(2)cd
(9.91)
で計算し,これによって縮退させた特性行列は,

342 9. 部分構造合成法(大熊政明@Copyright2006)[K
(2)bb K
(2)bd
K(2)db K
(2)dd
]=
[K
(2)bb + K
(2)bc Tcb K
(2)bc Tcd + K
(2)bd
T tcdK
(2)cb + K
(2)db K
(2)dd + K
(2)dc Tcd
]
[M
(2)bb M
(2)bd
M(2)db M
(2)dd
]=
M
(2)bb + M
(2)bc Tcb + T t
cbM(2)cb + T t
cbM(2)cc Tcb(2)
T tcd
(M
(2)cb + M
(2)cc Tcb
)+ M
(2)db + M
(2)dc Tcb
(M
(2)bc + T t
cb(2)M(2)cc
)Tcd + M
(2)bd + T t
cdM(2)cd
T tcd
(M
(2)cc Tcd + M
(2)cd
)+ M
(2)dc Tcd + M
(2)dd
(9.92)
と計算する.
3)モード座標上での運動方程式での質量連成行列(非対角部分に配置され
る部分行列)
Z(2)cb = M (2)
cc Tcb + M(2)cb (9.93)
を計算する.
以上で得られた2つの部分構造に関する演算処理結果を利用して合成解析の
過程に進む.まず,2つの部分構造の縮退行列の重ねあわせによって作成でき
る剛性行列と質量行列を使って結合領域 bの固有値解析を行う.
(K
(1)bb + K
(2)bb
)φ = λ
(M
(1)bb + M
(2)bb
)φ (9.94)
の解析で 1次からある適切な次数 p(b)次までの固有角振動数 Ω1(b) ∼ Ωp(b) と
固有モード φ1(b) ∼ φp(b) を求める.固有モードを列ベクトル成分として構成
した固有モード行列をΦ(b) と表す.
以上で求められたデータを使ってこの2つの部分構造からなる結合系の変位は,
δa
δb
δc
=
TabΦ(b) Φ(1) 0
Φ(b) 0 0
TcbΦ(b) 0 Φ(2)
ηb
ηa
ηc
(9.95)
のようにモード座標で表現することになる.したがって,この2部分構造結合
系の自由振動運動方程式は,このモード座標系上で
9. 4 拘束モード型合成法(逐次合成法) 343
I(b) sym.
Φt(1)Z
(1)ab Φ(b) I(1)
Φt(2)Z
(2)cb Φ(b) 0 I(2)
η[1]b
η[1]a
η[1]c
+
Ω2
(b) sym.
0 Ω2(1)
0 0 Ω2(2)
η
[1]b
η[1]a
η[1]c
=
0
0
0
(9.96)
と作成できるので,対応する固有値問題を解いて,1次から適切なある次数の
q次までの固有角振動数 Ω1[1] ∼ Ωp[1]と固有モード η1[1] ∼ ηq[1]を求める.な
お,I(b),I(1) と I(2) は単位行列であり,それらの自由度は結合領域b,部分
構造1番の内部領域,部分構造2番の内部領域について固有値解析で求めた固
有角振動数の次数の数である.
この固有モードを式(9.95)に代入すれば物理座標上での固有モードを求め
ることができる.後述の第2段目の合成解析で使用する便宜上,得られた1次
から p次までの固有モードを並べたモード行列を,
Φ[1]
a
Φ[1]b
Φ[1]c
(9.97)
と表現する.また,固有角振動数の二乗値を対角成分に並べた対角行列(モー
ド剛性行列)をΩ2[1] と表す.
ここで,次の第2段目の合成解析の演算上および解説上の利便性のために
P[1]ab = Z
(1)ab
P[1]cb = Z
(2)cb
(9.98)
と表現し直しておく.
以上で第1段の解析が終了である.

344 9. 部分構造合成法(大熊政明@Copyright2006)
9. 4. 2 第2段目の合成解析
第1段で解析された2つの部分構造結合の系についての第2段目の合成解析
に利用する剛性行列と質量行列は式(9.87),(9.92)で得られているものの重
ねあわせで得られるものとしてよい.すなわち,
[K
(1)bb + K
(2)bb K
(2)bd
K(2)db K
(2)dd
]
[M
(1)bb + M
(2)bb M
(2)bd
M(2)db M
(2)dd
] (9.99)
である.この特性行列から次の演算を行う.
1)今考えるべき結合領域 dの観点からは,この部分構造の内部領域自由度
の固有角振動数と固有モードは第1段ですでに得られている.そこで,計
算すべきことは,Guyanの静縮小で結合領域 dへの縮退特性行列 K[2]dd
と M[2]dd である.Guyanの縮小行列 Tbd は
Tbd = −(K
(1)bb + K
(2)bb
)−1
K(2)bd (9.100)
と得られるので,これによって
K[2]dd = K
(2)dd + K
(2)db Tbd
M[2]dd = M
(2)dd + M
(2)db Tbd + T t
bdM(2)bd + T t
bd
(M
(1)bb + M
(2)bb
)Tbd
(9.101)
と計算する.
2)質量連成を表現する部分行列は
Z[2]bd =
(M
(1)bb + M
(2)bb
)Tbd + M
(2)bd (9.102)
と計算する.
9. 4 拘束モード型合成法(逐次合成法) 345
この段で結合する部分構造3番については,第1段での部分構造2番とまっ
たく同様の演算処理となる.すなわち,まず剛性行列と質量行列
K(3)dd K
(3)de K
(3)df
K(3)ed K
(3)ee K
(3)ef
K(3)fd K
(3)fe K
(3)ff
M(3)dd M
(3)de M
(3)df
M(3)ed M
(3)ee M
(3)ef
M(3)fd M
(3)fe M
(3)ff
(9.103)
を作成して次の演算を行う.なお,図 9.4に示すように,この部分構造3番の
結合領域 f は第3段目の合成解析で部分構造4番と結合する自由度部分である
から,現段階では固定条件が設定される自由度とすることを認識しておく.
1)結合領域 dと f を固定した内部領域についての固有値問題
K(3)ee φ = λM (3)
ee φ (9.104)
を解き,1次から適切な p(3)次までの固有角振動数 Ω1(3) ∼ Ωp(3) と固
有モード φ1(3) ∼ φp(3) を計算する.固有モードを次数の昇べき順に列
に並べた行列をΦ(3)と表す.固有角振動数の二乗値を対角成分にならべ
た行列はΩ2(3) とする.
2)Guyanの静縮小によって,剛性行列と質量行列を結合領域自由度 dと f
へ縮退させる.静縮小行列は結合領域 dへの縮小行列と f への縮小行列
から構成され,

346 9. 部分構造合成法(大熊政明@Copyright2006)
δ(3)e = − K(3)
ee
−1K
(3)ed δ
(3)d − K(3)
ee
−1K
(3)ef δ
(3)f
↓
δd
δe
δf
=
I 0
Ted Tef
0 I
[δd
δf
]
↓Ted = − K(3)
ee
−1K
(3)ed
Tef = − K(3)ee
−1K
(3)ef
(9.105)
で計算し,それによって縮退させた特性行列は,
[K
(3)dd K
(3)df
K(3)fd K
(3)ff
]=
[K
(3)dd + K
(3)de Ted K
(3)de Tef + K
(3)df
T tefK
(3)ed + K
(3)fd K
(3)ff + K
(3)fe Tef
]
[M
(3)dd M
(3)df
M(3)fd M
(3)ff
]=
M
(3)dd + M
(3)de Ted + T t
edM(3)ed + T t
edM(3)ee Ted
T tef
(M
(3)ed + M
(3)ee Ted
)+ M
(3)fd + M
(3)fe Ted
(M
(3)de + T t
edM(3)ee
)Tef + M
(3)df + T t
edM(3)ef
T tef
(M
(3)ee Tef + M
(3)ef
)+ M
(3)fe Tef + M
(3)ff
(9.106)
と計算する.
3)モード座標上での運動方程式での質量連成行列(非対角部分に配置され
る部分行列)
Z(3)ed = M (3)
ee Ted + M(3)ed (9.107)
を計算する.
以上で演算準備できたデータを使ってモード合成計算を行い,モード座標上
で自由振動運動方程式を次のように導出する.
まず,この段での結合領域dについての固有値問題
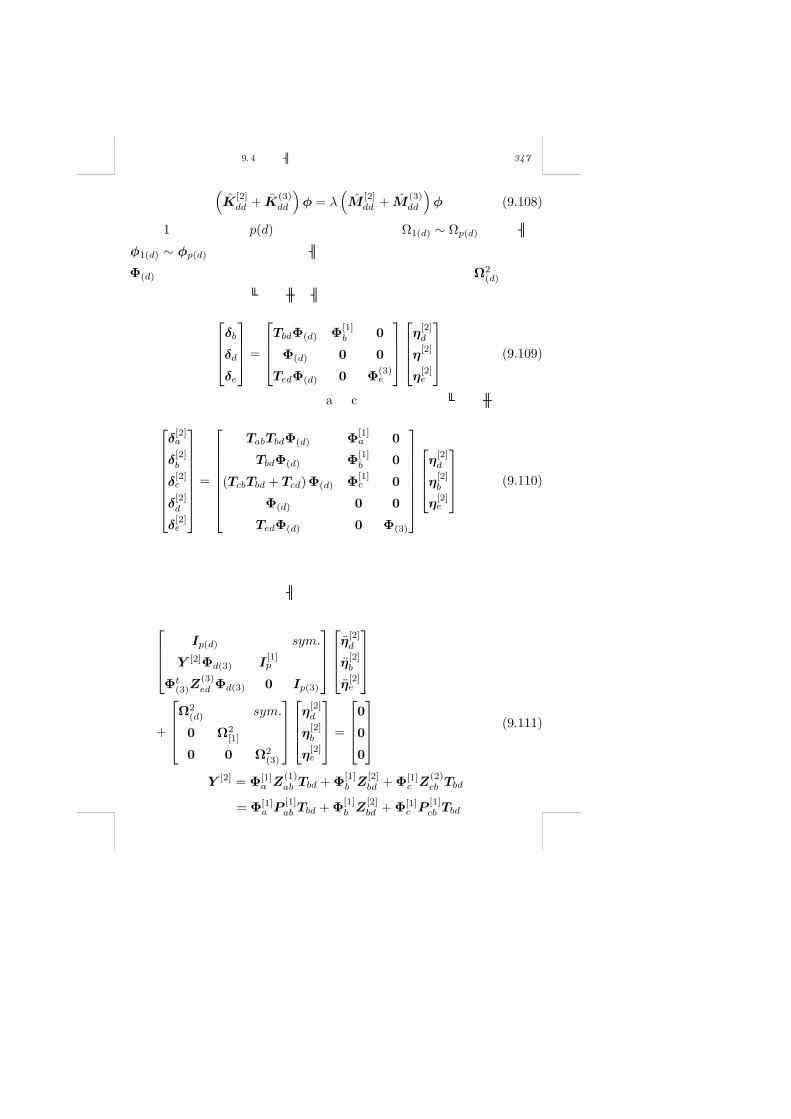
9. 4 拘束モード型合成法(逐次合成法) 347
(K
[2]dd + K
(3)dd
)φ = λ
(M
[2]dd + M
(3)dd
)φ (9.108)
を解き,1次から適切な p(d)次までの固有角振動数 Ω1(d) ∼ Ωp(d) と固有モー
ド φ1(d) ∼ φp(d) を計算する.固有モードを次数の昇べき順に列に並べた行列
をΦ(d)と表す.固有角振動数の二乗値を対角成分に並べた行列はΩ2(d)と表す.
この段階での系の変位ベクトルのモード表現は次のようになる.
δb
δd
δe
=
TbdΦ(d) Φ[1]b 0
Φ(d) 0 0
TedΦ(d) 0 Φ(3)e
η[2]d
η[2]
b
η[2]e
(9.109)
部分構造1番と2番の純粋な内部領域 aと cまで含めた変位ベクトルは
δ[2]a
δ[2]b
δ[2]c
δ[2]d
δ[2]e
=
TabTbdΦ(d) Φ[1]a 0
TbdΦ(d) Φ[1]b 0
(TcbTbd + Tcd)Φ(d) Φ[1]c 0
Φ(d) 0 0
TedΦ(d) 0 Φ(3)
η[2]d
η[2]b
η[2]e
(9.110)
と表現される.
物理的に単純に記述してしまうとひじょうに大自由度になる第2段目の系の
自由振動の運動方程式は,このモード座標へ変換すると
Ip(d) sym.
Y [2]Φd(3) I[1]p
Φt(3)Z
(3)ed Φd(3) 0 Ip(3)
η[2]d
η[2]b
η[2]e
+
Ω2
(d) sym.
0 Ω2[1]
0 0 Ω2(3)
η[2]d
η[2]b
η[2]e
=
0
0
0
ここで, Y [2] = Φ[1]a Z
(1)ab Tbd + Φ[1]
b Z[2]bd + Φ[1]
c Z(2)cb Tbd
= Φ[1]a P
[1]ab Tbd + Φ[1]
b Z[2]bd + Φ[1]
c P[1]cb Tbd
(9.111)
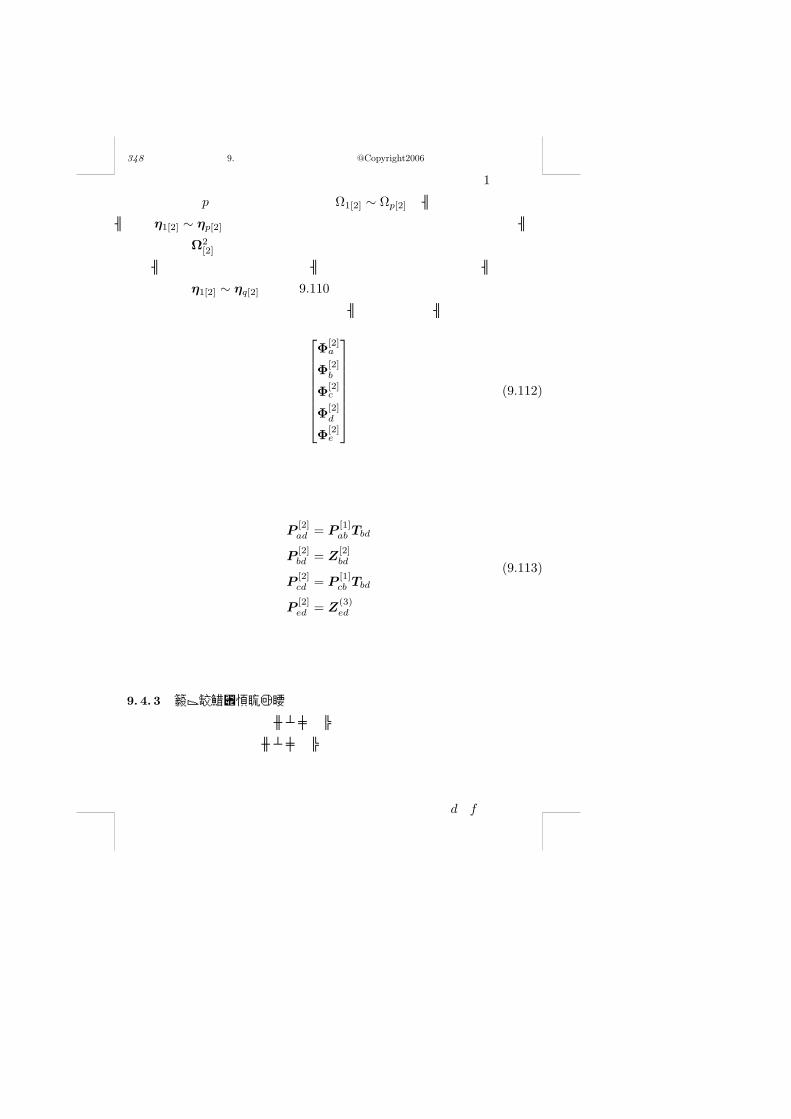
348 9. 部分構造合成法(大熊政明@Copyright2006)
と作成される.この運動方程式について固有値問題を解くことで,1次からあ
る適切な次数の p次までの固有角振動数Ω1[2] ∼ Ωp[2]とモード座標上での固有
モード η1[2] ∼ ηp[2] を求める.固有角振動数の二乗値を対角成分に並べたモー
ド剛性行列をΩ2[2] と表す.
このモード座標上で得られた固有モードから物理座標上での固有モードの導
出は得られた η1[2] ∼ ηq[2] を式(9.110)に代入計算して求められる.
次の第3段目合成解析のため,この固有モードを並べたモード行列を,
Φ[2]a
Φ[2]b
Φ[2]c
Φ[2]d
Φ[2]e
(9.112)
と表現する.
ここで,次の第3段目の合成解析の演算上および解説上の利便性のために
P[2]ad = P
[1]ab Tbd
P[2]bd = Z
[2]bd
P[2]cd = P
[1]cb Tbd
P[2]ed = Z
(3)ed
(9.113)
と表現し直しておく.
以上で第2段の解析が終了である.
9. 4. 3 第3段目の合成解析
第2段までの合成解析のアルゴリズムの理解によって読者諸兄は,すでに第
3段以降の逐次繰り返しアルゴリズムが第2段のものと同一的に組み上げられ
ることを想像できていると思うが,一応,本例題は第3段で完結するので簡潔
に示す.
第2段で解析された3つの部分構造結合の系について領域 d,f に縮退した

9. 4 拘束モード型合成法(逐次合成法) 349
の剛性行列と質量行列が得られている.すなわち,式(9.101)および(9.106)
の重ねあわせによって,
[K
[2]dd + K
(3)dd K
(3)df
K(3)fd K
(3)ff
]
[M
[2]dd + M
(3)dd M
(3)df
M(3)fd M
(3)ff
] (9.114)
である.まずこの特性行列からの次の演算を行う.
1)この段での2つの部分構造(第2段で完了した部分構造 1番から 3番ま
でが結合して出来上がっている部分構造と新たにこの段で結合する部分
構造 4番)の結合で考えるべき結合領域 f の観点からは,この部分構造
の内部領域自由度の固有角振動数と固有モードは第2段ですでに得られ
ている.固有角振動数は Ω1[2] ∼ Ωq[2] として,そして固有モードは.式
(9.112)である.そこで,計算すべきことは,Guyanの静縮小で結合領
域 f への縮退特性行列 K[3]ff と M
[3]ff である.Guyanの縮小行列 Tdf は
Tdf = −(K
[2]dd + K
(3)dd
)−1
K(3)df (9.115)
と得られるので,これによって
K[3]ff = K
(3)ff + K
(3)fd Tdf
M[3]ff = M
(3)ff + M
(3)fd Tdf + T t
dfM(3)df + T t
df
(M
[2]dd + M
(3)dd
)Tdf
(9.116)
と計算する.
2)質量連成を表現する部分行列は
Z[3]df =
(M
[2]dd + M
(3)dd
)Tdf + M
(3)df (9.117)
と計算する.
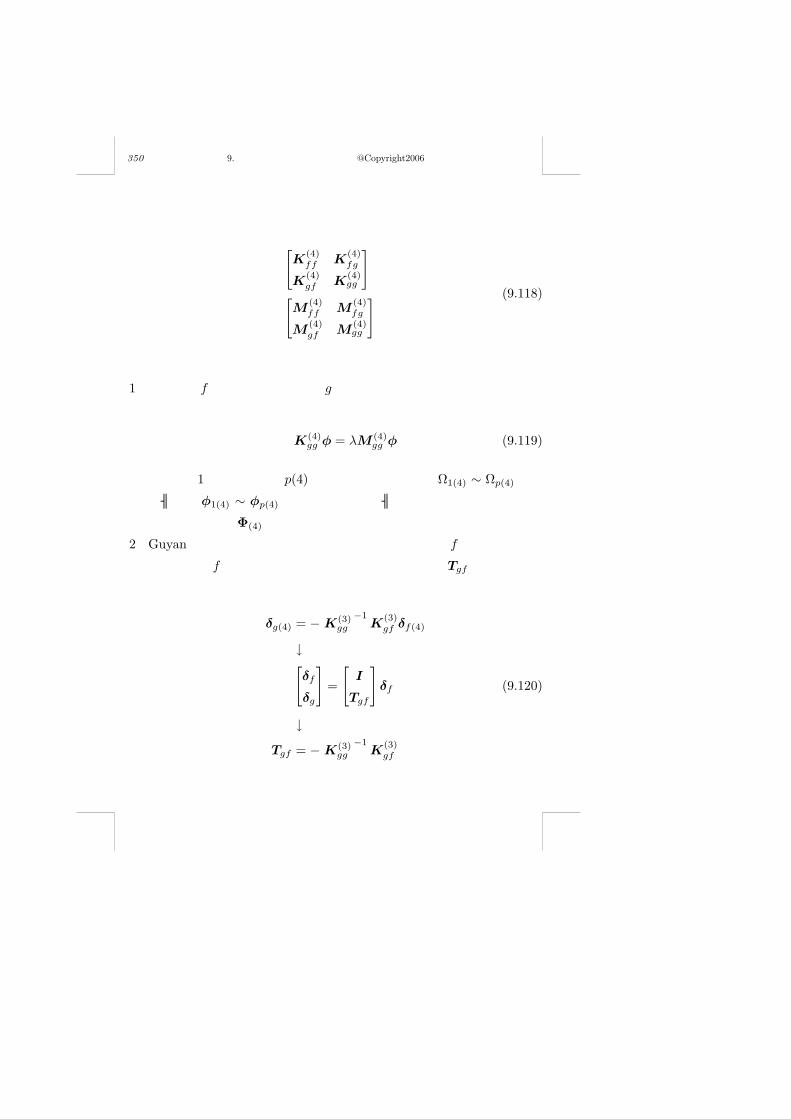
350 9. 部分構造合成法(大熊政明@Copyright2006)
新たにこの段で結合させる部分構造4番については,まずその剛性行列と質
量行列
[K
(4)ff K
(4)fg
K(4)gf K
(4)gg
]
[M
(4)ff M
(4)fg
M(4)gf M
(4)gg
] (9.118)
を求める.そして,次の演算を実行する.
1)結合領域 f を固定した内部領域 gについての固有値問題
K(4)gg φ = λM (4)
gg φ (9.119)
を解き,1次から適切な p(4)次までの固有角振動数 Ω1(4) ∼ Ωp(4) と固
有モード φ1(4) ∼ φp(4) を計算する.固有モードを次数の昇べき順に列
に並べた行列をΦ(4) と表す.
2)Guyanの静縮小によって,特性行列を結合領域自由度 f へ縮退させる.
結合領域 f へ特性行列を縮退させるための縮退行列 Tgf は
δg(4) = − K(3)gg
−1K
(3)gf δf(4)
↓[δf
δg
]=
[I
Tgf
]δf
↓Tgf = − K(3)
gg
−1K
(3)gf
(9.120)
と計算できる.これによって縮退させた特性行列は,

9. 4 拘束モード型合成法(逐次合成法) 351
K(4)ff = K
(4)ff + K
(3)fg Tgf(4)
M(4)ff = M
(4)ff + M
(4)fg Tgf(4) + T t
gf(4)M(4)gf + T t
gf(4)M(4)gg Tgf(4)
(9.121)
と計算する.
3)モード座標上での運動方程式での質量連成行列(非対角部分に配置され
る部分行列)
Z(4)gf = M (4)
gg Tgf + M(4)gf (9.122)
を計算する.
以上で演算準備できたデータを使ってモード合成計算を行い,モード座標上
で自由振動運動方程式を次のように導出する.
まず,この段での結合領域 fについての固有値問題
(K
[3]ff + K
(4)ff
)φ = λ
(M
[3]ff + M
(4)ff
)φ (9.123)
を解き,1次から適切な p(4)次までの固有角振動数 Ω1(4) ∼ Ωp(4) と固有モー
ド φ1(4) ∼ φp(4) を計算する.固有モードを次数の昇べき順に列に並べた行列
をΦ(4) と表す.
この段階での系の変位ベクトルのモード表現を示せば次のようになる.
δd
δf
δg
=
TdfΦ(f) Φ[2]d 0
Φ(f) 0 0
TgfΦ(f) 0 Φ(4)
η[3]f
η[3]d
η[3]g
(9.124)
部分構造1番と2番と3番の純粋な内部領域 a,c,eまで含めた変位ベクトルは
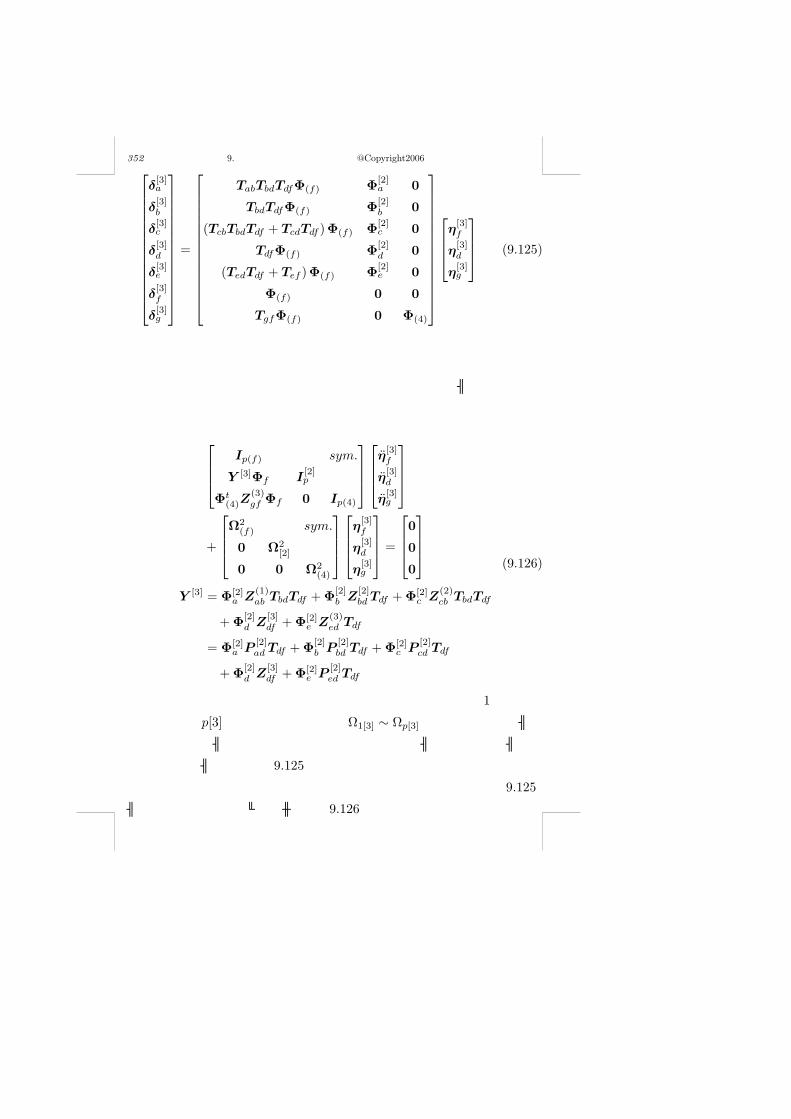
352 9. 部分構造合成法(大熊政明@Copyright2006)
δ[3]a
δ[3]b
δ[3]c
δ[3]d
δ[3]e
δ[3]f
δ[3]g
=
TabTbdTdfΦ(f) Φ[2]a 0
TbdTdfΦ(f) Φ[2]b 0
(TcbTbdTdf + TcdTdf )Φ(f) Φ[2]c 0
TdfΦ(f) Φ[2]d 0
(TedTdf + Tef )Φ(f) Φ[2]e 0
Φ(f) 0 0
TgfΦ(f) 0 Φ(4)
η[3]f
η[3]d
η[3]g
(9.125)
と表現される.
物理的に単純に記述してしまうとひじょうに大自由度になる構造物全系(第
3段目の解析対象の結合系)の自由振動の運動方程式は,このモード座標へ変
換すると
Ip(f) sym.
Y [3]Φf I[2]p
Φt(4)Z
(3)gf Φf 0 Ip(4)
η[3]f
η[3]d
η[3]g
+
Ω2
(f) sym.
0 Ω2[2]
0 0 Ω2(4)
η[3]f
η[3]d
η[3]g
=
0
0
0
ここで, Y [3] = Φ[2]a Z
(1)ab TbdTdf + Φ[2]
b Z[2]bd Tdf + Φ[2]
c Z(2)cb TbdTdf
+ Φ[2]d Z
[3]df + Φ[2]
e Z(3)ed Tdf
= Φ[2]a P
[2]ad Tdf + Φ[2]
b P[2]bd Tdf + Φ[2]
c P[2]cd Tdf
+ Φ[2]d Z
[3]df + Φ[2]
e P[2]ed Tdf
(9.126)
と作成される.この運動方程式について固有値問題を解くことで,1次からあ
る適切な次数の p[3]次までの固有角振動数Ω1[3] ∼ Ωp[3]とそれに対応するモー
ド座標上での固有モードを求める.物理座標上での固有モードは,このモード
座標上での固有モードを式(9.125)に代入計算して得られる.
強制振動応答解析をするためには,物理座標上で設定される外力を式(9.125)
のモード座標へ変換したベクトルを式(9.126)の右辺に代入して進めればよい.
9. 4 拘束モード型合成法(逐次合成法) 353
すなわち,物理座標上で外力ベクトルが
fa
fb
fc
fd
fe
ff
fg
(9.127)
と設定すると,
TabTbdTdfΦ(f) Φ[2]a 0
TbdTdfΦ(f) Φ[2]b 0
(TcbTbdTdf + TcdTdf )Φ(f) Φ[2]c 0
TdfΦ(f) Φ[2]d 0
(TedTdf + Tef )Φ(f) Φ[2]e 0
Φ(f) 0 0
TgfΦ(f) 0 Φ(4)
t
fa
fb
fc
fd
fe
ff
fg
(9.128)
の計算である.なお,現実的には式(9.127)で示される構造物全体のすべての
自由度に外力が同時に加わる解析はほとんどないと思われる.そのような現実
的場合には,式(9.127)を構成する部分ベクトル fa から fg のほとんどはゼ
ロベクトルとして設定されるので,式(9.128)の演算は非常に簡単で小さな行
列計算となる.変位加振の解析の場合の外力ベクトル設定方法については本章
9. 2. 2節 c.項を参照されたし.
以上が逐次3重での解析アルゴリズムである.

10音響解析(大熊政明@Copyright2006)
空中の構造物が振動すると当然それに接している空気もゆすられるので空気
に粗密波が発生し,空間に広がっていく.その空気の粗密波が私たちの聴力範
囲である周波数成分をもつと音として認識され,一般に機械から発生する音は
機械音とか機械騒音と呼ばれ,あまり好まれない場合が大半である.また,旅
客機の機内や自動車の車室などの閉空間や,開口部を有する半閉空間において
は反射音の重ねあわせによる共鳴現象が発生する周波数もあり,騒音レベルが
ひじょうに大きくなり,切実な問題となる場合がある.そこで,機械および機
械構造物の振動学である構造動力学に関連して音響解析の基礎を学習すること
は大切であると思われるので,この章で解説することにする.
図 10.1 平面音場のおける波動方程式導出解説図