질점의운동학 - 영남대학교ynucc.yeungnam.ac.kr/~wklee/dynamics/chap12.pdf ·...
TRANSCRIPT

12장 1/54
Chapter 12
질점의 운동학
(Kinematics of a Particle )

12장 2/54
12.1 서 론
역학(Mechanics) : 정지해 있거나 운동하는 물체에 작용하는 힘과 그 물체의 운동
혹은 변형상태와의 관계를 연구하는 물리학의 한 분야
공업역학(Engineering mechanics) : 공학 특히 기계, 토목공학 분야에 직접 적용될
수 있는 역학으로서 물체의 크기가 원자나 분자보다는 월등히 크고
물체의 속도가 광속보다는 월등히 작은 경우를 주로 연구한다
정역학(Statics) : 정지해 있거나 일정한 속도를 가진 물체에 작용하는 힘의
평형상태를 연구
동역학(Dynamics) : 움직이는 물체에 작용하는 힘과 그 운동의 변화와의 관계를
연구 (원인) (결과)
(양자역학)
(상대성역학)

12장 3/54
공업역학
공업역학에서 다루는 물체
1. 질점 : 질량은 있으나 크기는 무시할 수 있는 물체로서 그 위치 (3개의 좌표)를 시간의
함수로써 표현하면 운동상태는 결정된다.2. 강체 : 질량과 크기는 있으나 변형은 무시할 수 있는 물체로서 그 위치 (3개의 좌표)와
자세(3개의 좌표)를 시간의 함수로써 표현하면 운동상태는 결정된다
3. 변형체 : 질량, 크기, 변형이 모두 있는 물체로서 고체, 유체(액체와 기체) 등이 그
예가 된다
정역학 (Statics)동역학 (Dynamics) 운동학(Kinematics) : 물체의 운동의 표현에만 관심
운동역학(Kinetics) : 운동과 그 원인이 되는 힘과의
관계에 관심
((

12장 4/54
주의
엄밀히 말하자면 질점과 강체는 존재할 수 없는 이상적 물체이지만 문제를 근
사화 혹은 단순화 하는 과정에서 소개되는 물체이다. 예로써 공항에서 이륙한 항
공기의 위치에만 관심이 있다면 항공기를 질점으로 간주할 수 있겠지만 승객이나
기장의 입장에선 항공기의 자세에도 관심이 있을 테니, 그 땐 강체로 볼 수 있을
것이고, 항공기를 제작하는 엔지니어의 입장에선 항공기 날개 등의 진동에 관심
이 있을 수 있으니 그 땐 변형체로 봐야 할 것이다. 이렇게 같은 물체라 하더라도
그 관심대상에 따라 질점, 강체, 혹은 변형체로 볼 수 있다는 뜻이다. 이 쯤 되면 독
자 중엔 우리가 살고 있는 지구를 언제 질점, 강체, 변형체로 볼 수 있는지를 생각
하는 사람도 있을 것이다.
주의
이 동역학 교과에선 주로 질점과 강체를 연구대상 물체로 삼는다.

12장 5/54
역학의 간략한 역사
Aristotele : 무거운 돌은 가벼운 돌보다 먼저 떨어진다
Archimedes : 부력의 원리
Galileo Galilei : 동역학을 이성적 관점으로 보기 시작. 즉, 역학을 이해하는 데
실험과 관찰의 중요성을 인식. 세 개의 중요한 관찰 : 자유낙하운동, 경사면에서의 운동, 진자 운동
Kepler : 행성운동에 관한 세 법칙 - 뉴턴이 운동법칙과 미적분을 발견하는데 결
정적으로 기여
Newton : 만유인력의 법칙과 질점 운동법칙의 발견
Euler : 강체의 운동방정식 유도
D’Alembert : 벡터량(힘, 가속도)이 아니라 스칼라량(일, 에너지)으로 동역학을
해석 시도 - 해석역학 (뉴턴의 벡터역학에 대응하는 용어)의 출발Lagrange
(1564 - 1642)
(1642 - 1727)

12장 6/54
12.2 직선운동학 : 연속운동(Rectilinear Kinematics : Continuous Motion)
직선상에서 운동하는 질점의 특정 시간에서의 위치, 속도, 가속도가 서로 어
떤 관계를 가지는 지를 살펴봄으로써 장차 질점의 일반적인 운동 즉 곡선운동
의 기초로 삼는다.
위치벡터(Position Vector)직선상에서 운동하는 질점이 특정순간에 위
치한 점 의, 기준점 로부터의 위치는 위치
벡터 로 나타내는데 여기서 는 점
의 좌표이며 는 오른쪽 방향의 단위벡터이다. ( 따라서 점 가 의 오른쪽에 위치하면 (Fig.
12-1(a)의 경우) 좌표 가 양이고, 왼쪽에 위치
하면 가 음이 되는데, 이 때 의 방향은 각각
오른쪽과 왼쪽방향이 된다.
ir s=i
rs
sP
P
P
s
O
O
(a)
Fig. 12-1

12장 7/54
변위 (displacement)질점의 변위는 말그대로 위치의 변화이다. 즉, 질점이 에서 으로 이동하면 그 때 변위는
로 나타낸다.이고 로 나타내면
가 된다. 질점의 최종위치
( )가 초기위치( )의 오른쪽에 위치하면
(Fig. 12-1(b)의 경우) 는 양이고 그 반대이면
는 음이 된다.
P P′rrr −′=∆
ir s′=′ sss −′=∆iir sss ∆=−′=∆ )(
PP′s∆
s∆(b)
Fig. 12-1
r(t' )=
r(t)
=
t
t' = t+Δt
질점이 이동한 거리는 양의 스칼라량이므로 벡터량인 변위 이나 스칼라량인
와 분명히 다르다.
단, 운동의 방향이 변하지 않는 경우 = 이동거리가 된다.
주의
r∆ s∆
s∆

12장 8/54
속도 (Velocity)시간 동안에 의 변위를 가진 질점의
위치가 일정하면 즉, 속도는 이다.
속력(Speed)은 속도의 크기이므로 양의 스칼라량으로서 단위는 m/sec이며
속력
주의
주의
0ivir ==∴= )( CC rdtdr
vvsp == v
t∆
v
r∆
irrv
irrrv
vdtd
t
ts
tttt
t
avg
≡≡∆∆
=
∆∆
=∆∆
=−∆+
−′=
→∆ 0lim
)(
속도순간
속도평균
질점이 오른쪽으로 움직이면 (그림(c)의 경우) 는 양이고 그 반대이면 는 음이다.v
sdtd
dtdss
dtd
dtds iiirvir +==== )( 이므로
는 방향도 크기도 변하지 않는 단위벡터이므로i 0i=
dtd
ivdtds
= 따라서 이다결국dtdsv =
0
(c)
Fig. 12-1
(12-1)

12장 9/54
평균속력
평균속도
속도의 방향이 바뀌는 경우평균속력 평균속도의 크기≠
ts
ttv T
avgsp ∆=
∆∆
=)(질점이 시간 동안에 이동한 거리
iirvtPP
ts
tavg ∆′−
=∆∆
=∆∆
=)(
(d)평균속도와 평균속력주의
Fig. 12-1

12장 10/54
가속도(Acceleration)
시간 동안에 의 속도변화를 가진 질점의t∆ v∆
속도가 일정하면
즉, 가속도는 이다.
주의
( ) 0iaiv ==∴= CC vdtdv
0
2
2
0
)(
lim
)(
dtsd
dtds
dtd
dtdva
adtd
t
tv
tttt
t
avg
===
≡≡∆∆
=
∆∆
=∆∆
=−∆+
−′=
→∆ivva
ivvva
가속도 순간
가속도 평균
vv >′
vv <′
0>−′=∆ vvv
0<−′=∆ vvv
Fig. 12-1(e)에서처럼 인 경우엔
이므로 가속도가 오른쪽을 향하지만
(가속 : acceleration)
Fig. 12-1(f)에서처럼 인 경우엔
이므로 가속도가 왼쪽을 향한다. (감속 : deceleration)
(f)
(12-2) (e)
Fig. 12-1

12장 11/54
가속도가 위치의 좌표 s의 함수인 경우엔 다음의 관계식을 사용할 수 있다.
1. 속도를 시간의 함수로 나타내려면
초기속도 인 경우
가속도가 일정한 경우,
dvvdsa
vdsdv
dtds
dsdv
dtdva
=∴
===
Caa =
이용하여를 ,, dvvdsadtdsv
dtdva CC ===
(12-3)
00vv
t=
=
dtadv t
C
v
v ∫∫ =00
tavtv C+= 0)( (12-4)

12장 12/54
2. 위치를 시간의 함수로 나타내려면
초기위치 00ss
t=
=
dttavdtvds C
tts
s)(
0 000
+== ∫∫∫2
00 21 tatvss C++= (12-5)
3. 속도를 위치의 함수로 나타내려면
이므로때일초기위치인 00 vvss ==
dsadvvs
s C
v
v ∫∫ =00
( )020
2 2 ssavv C −+= (12-6)
12장 13/54
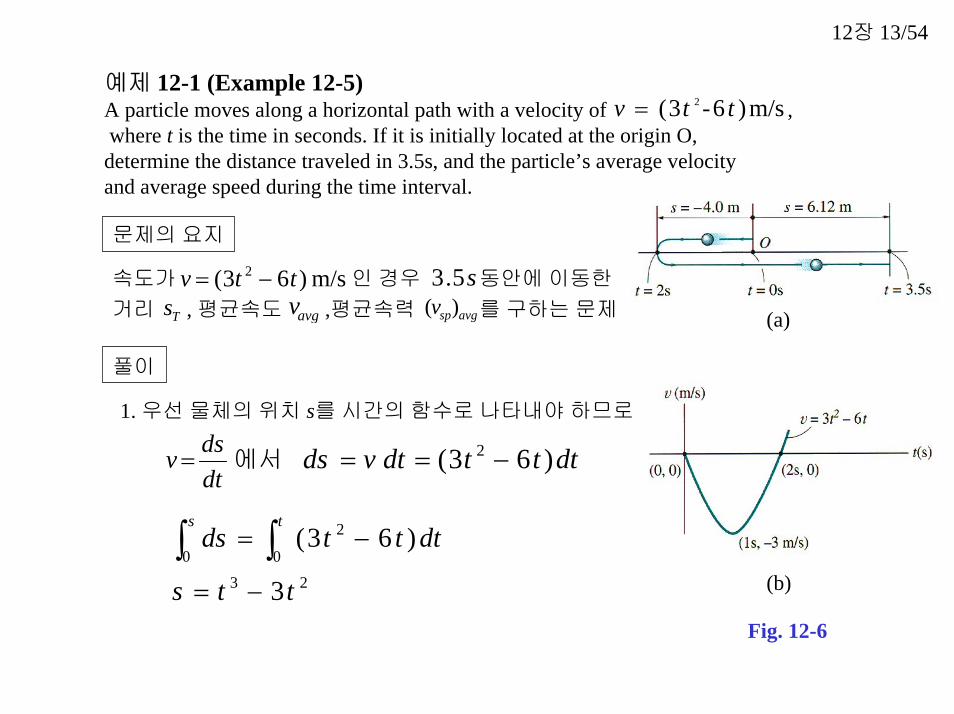
문제의 요지
속도가 인 경우 동안에 이동한
거리 , 평균속도 ,평균속력 를 구하는 문제
예제 12-1 (Example 12-5)A particle moves along a horizontal path with a velocity of ,where t is the time in seconds. If it is initially located at the origin O, determine the distance traveled in 3.5s, and the particle’s average velocity and average speed during the time interval.
m/s)63( 2 ttv −=Ts avgv avgspv )(
s5.3
(a)
m/s)63( 2 t-tv =
풀이
1. 우선 물체의 위치 s를 시간의 함수로 나타내야 하므로
에서dtdsv = dtttdtvds )63( 2 −==
230 0
2
3
)63(
tts
dtttdss t
−=
−=∫ ∫(b)
Fig. 12-6

12장 14/54
( ) ( ) ( ) ( ) ( )m1.14
4125.60425.302
=
+=−+−= −−−−sssssT
ANS.
물체의 이동거리 를 구하기 위해 우선 운동경로를
알아야 한다. Fig. 12-6b에서 에서 이므로,
에서 속도의 방향 을 바꾼다. 또한
Ts
st 2= 0=vm4128
2−=−=
=ts ) ( 부호의v
이므로 m .st
12565.3=
=
( ) ( )→==−
=∆∆
=−
−m/s)(
2.
75.15.3
0125.605.3
05.3 sstsvavg
평균속도
ANS.
m/s)(
3.
04.45.31.14==
∆=
tsv T
avgsp
평균속력
ANS.

12장 15/54
문제의 요지
물체의 가속도가 고도 y의 함수 인 경우의 탈출
속도(escape velocity) 즉, 물체가 다시 지구로 돌아 올 수 없도록
지구표면에서의 물체가 가져야 하는 초기 속도를 구하는 문제.
가속도가 위치의 함수로 주어졌으므로
를 이용하면
지구로부터 무한히 먼 곳 즉, 에서의 속도 는 0 이면 충분
(지구로 돌아오지 못하기에)하므로
예제 12-2 (Problem 12-34)As a body is projected to a high altitude above the earth’s surface, the variation of the acceleration of gravity with respect to altitude y must be taken into account. Neglecting air resistance, this acceleration is determined from the formulawhere is the constant gravitational acceleration at sea level, is the radius of the
earth, and the positive direction is measured upward. If Determine the minimum initial velocity (escape velocity) at which a projectile should be shot vertically from the earth’s surface so that it does not fall back to the earth. Hint: This requires that .
[ ],)/( 220 yRRga +−=
og Rkmandm/s 635681.9 2
0 == Rg
∞→= yv as0
2
2
0 )( yRRga+
−=
풀이
dyadvv = ∫∫∞
+−=∞
0 22
0 )( yRdyRgdvv
v
v esc
∞=y ∞v
y
R
지구

12장 16/54
)1(12
20
0
20
02
RRg
yRRgv
escv
−=+
=∞
km/s2.112 0 ==∴ Rgvesc ANS.
주의
탈출속도는 질량에 무관하다.

12장 17/54
12.3 급변하는 직선운동( Rectilinear Kinematics : Erratic Motion )
질점의 운동이 급변하는 경우(예, 속도나 가속도가 불연속인 경우)에는 그 운동
을 하나의 연속함수로 나타낼 수가 없으므로, 미분과 적분이 함수의 그래프에서
각각 기울기와 면적을 나타낸다는 점을 감안하여 도식적으로 해결하는 편이 편리
하다. 그 자세한 내용은 미적분의 응용에 해당하므로 본 강의에선 생략하기로 한
다.
s-t 그래프가 주어졌을 때 v-t 그래프 그리기
,vdtds
=
(a) (b)Fig. 12-27
s-t 그래프의 기울기 = 속도

12장 18/54
v - t 그래프가 주어졌을 때 a - t 그래프 그리기
,adtdv
= v-t 그래프의 기울기 = 가속도
(b)(a)
Fig. 12-28
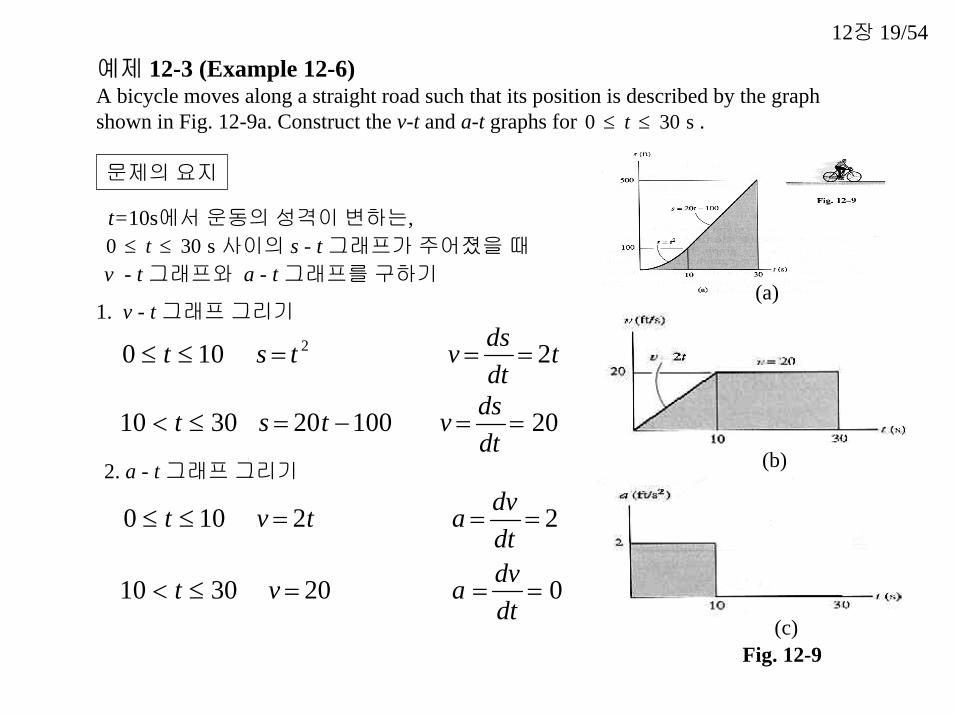
12장 19/54
t=10s에서 운동의 성격이 변하는, 사이의 s - t 그래프가 주어졌을 때
v - t 그래프와 a - t 그래프를 구하기
2. a - t 그래프 그리기
예제 12-3 (Example 12-6)A bicycle moves along a straight road such that its position is described by the graph shown in Fig. 12-9a. Construct the v-t and a-t graphs for .
문제의 요지
1. v - t 그래프 그리기
tdtdsvtst 2100 2 ===≤≤
20100203010 ==−=≤<dtdsvtst
22100 ===≤≤dtdvatvt
0203010 ===≤<dtdvavt
(a)
(b)
(c)
s300 ≤≤ t
s300 ≤≤ t
Fig. 12-9

12장 20/54
주의
t = 10s에서, s - t 그래프는 연속이고 미분가능(미분값이 연속이므로)v - t 그래프는 연속이고 미분불가능(미분값이 불연속이므로)a - t 그래프는 불연속 (물론 미분불가능)
이 예에서 알 수 있다시피 함수는 미분하면 그 성질이 나빠지고 적분하면
좋아진다.
12장 21/54
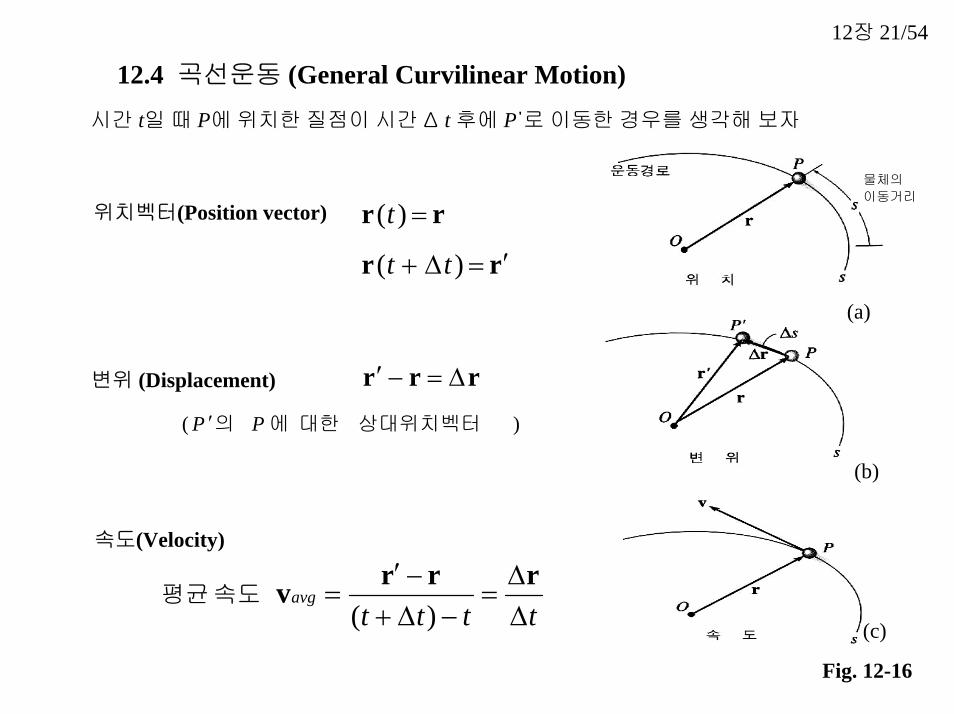
12.4 곡선운동 (General Curvilinear Motion)
시간 t일 때 P에 위치한 질점이 시간 Δ t 후에 P΄로 이동한 경우를 생각해 보자
위치벡터(Position vector)
변위 (Displacement)
rr
(a)
(b)
물체의
이동거리
=)(t
rr ′=∆+ )( tt
rrr ∆=−′
) ( 상대위치벡터대한에의 PP ′
Fig. 12-16
(c)
속도(Velocity)
ttttavg
∆∆
=−∆+
−′=
rrrv)(
속도평균
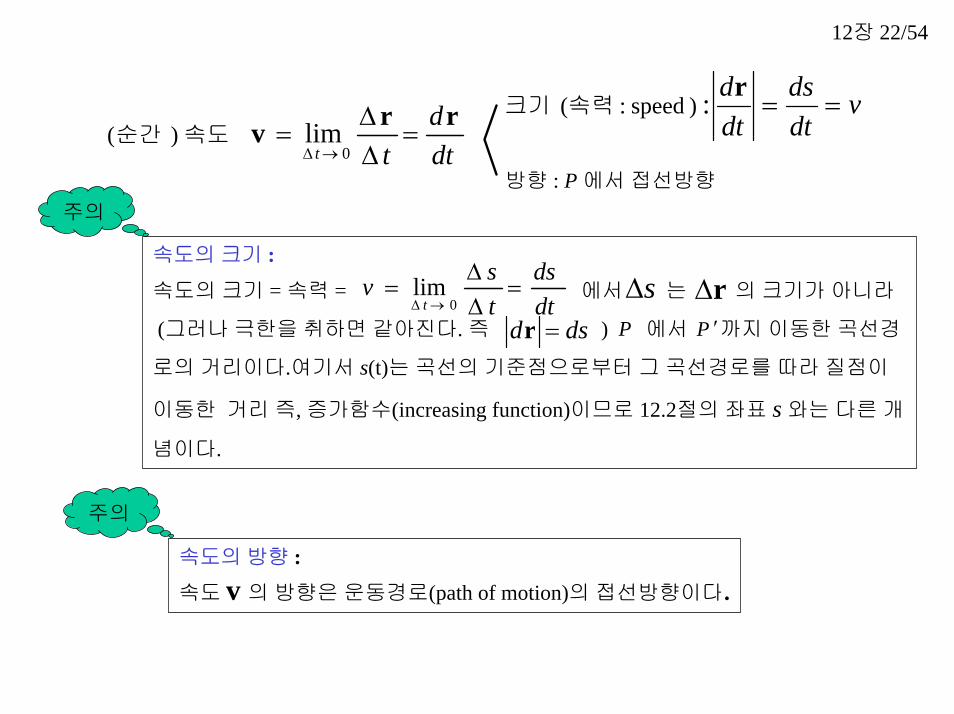
12장 22/54
속도의 크기 :
속도의 크기 = 속력 = 에서 는 의 크기가 아니라
(그러나 극한을 취하면 같아진다. 즉 ) 에서 까지 이동한 곡선경
로의 거리이다.여기서 s(t)는 곡선의 기준점으로부터 그 곡선경로를 따라 질점이
이동한 거리 즉, 증가함수(increasing function)이므로 12.2절의 좌표 s 와는 다른 개
념이다.
dtds
tsv
t=
∆∆
=→∆ 0
lim s∆ r∆dsd =r P P ′
주의
dtd
tt
rrv =∆∆
=→∆ 0
lim )( 속도순간v
dtds
dtd
==r:)speed:(속력크기
방향 : P 에서 접선방향
주의
속도의 방향 :
속도 의 방향은 운동경로(path of motion)의 접선방향이다.v

12장 23/54
가속도(acceleration)
시간 일 때 ( 에서) 속도가 인 질점이 시간 후에 ( 에서) 속도가
로 변한 경우를 생각해 보자.
vvvv ∆+=′
P P ′t t∆
ttttavg
∆∆
=−∆+
−′=
vvva)(
가속도평균
(e)
Hodograph
(d)Path
Fig. 12-16
12장 24/54
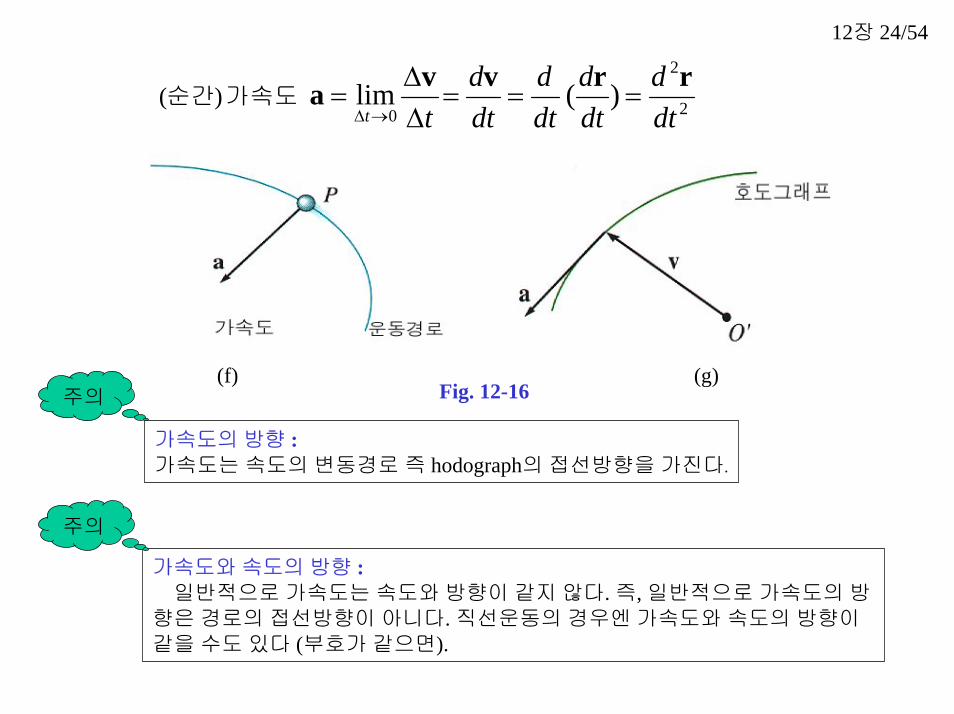
2
2
0 )( lim )(
dtd
dtd
dtd
dtd
tt
rrvva ===∆∆
=→∆
가속도순간
(f) (g)주의 Fig. 12-16
가속도의 방향 :가속도는 속도의 변동경로 즉 hodograph의 접선방향을 가진다.
주의
가속도와 속도의 방향 :일반적으로 가속도는 속도와 방향이 같지 않다. 즉, 일반적으로 가속도의 방
향은 경로의 접선방향이 아니다. 직선운동의 경우엔 가속도와 속도의 방향이같을 수도 있다 (부호가 같으면).

12.5 곡선운동 : 직각성분 (Curvilinear Motion : Rectangular Components)
운동을 표현하는 데 사용되는 좌표에 따라 운동을 표현하는 방식이 달라지는데
우선 직각좌표로 운동을 나타내보자.
여기서 는 각각 시간 의 함수이다.
12.2절에서 직선운동의 축을 축으로 삼으면 이고 인
경우가 되므로, 직선운동은 곡선운동의 특수한 경우에 불과하다.
위치(Position)에 위치한 질점의 위치벡터를 직교하는 세 축의
좌표 와 그 축방향으로의 단위벡터
로써 다음과 같이 나타낼 수 있다.
P
( )kji ,,( )zyx ,,
kjir zyx ++=zyx ,,,r t
즉, 의 크기 즉 가 원점 로부터 떨어진 거리는
이다)(,)(,)(),( tzztyytxxt ==== rrr
r
P이고222 zyxr ++=
방향의 단위벡터는 이다rr // rrru ==
주의
x 0== zysx =
(a)
(12-10)
O
12
O
장 25/54
Fig. 12-17

12장 26/54
여기서 의 방향은 시간에 따라 변하지 않으며
크기는 1로써 고정되어 있으므로 의 시간도함
수는 이다. 단위벡터 와 의 경우도 마찬가
지이므로
속 도 (Velocity)
( ) ( ) ( ) ( )kjikjirv zdtdy
dtdx
dtdzyx
dtd
dtd
++=++==
( )dtdx
dtdxx
dtd iii +=
ii
j k0kji
===dtd
dtd
dtd
kjirv zyx vvvdtd
++==
,,, zdtdzvy
dtdyvx
dtdxv zyx ======
0
(12-11)
(12-12) (b)
Fig. 12-17222zyx vvvv ++==v
방향의 단위벡터 는 운동경로의 접선방향의 단위벡터이다v /v v vu =
12장 27/54
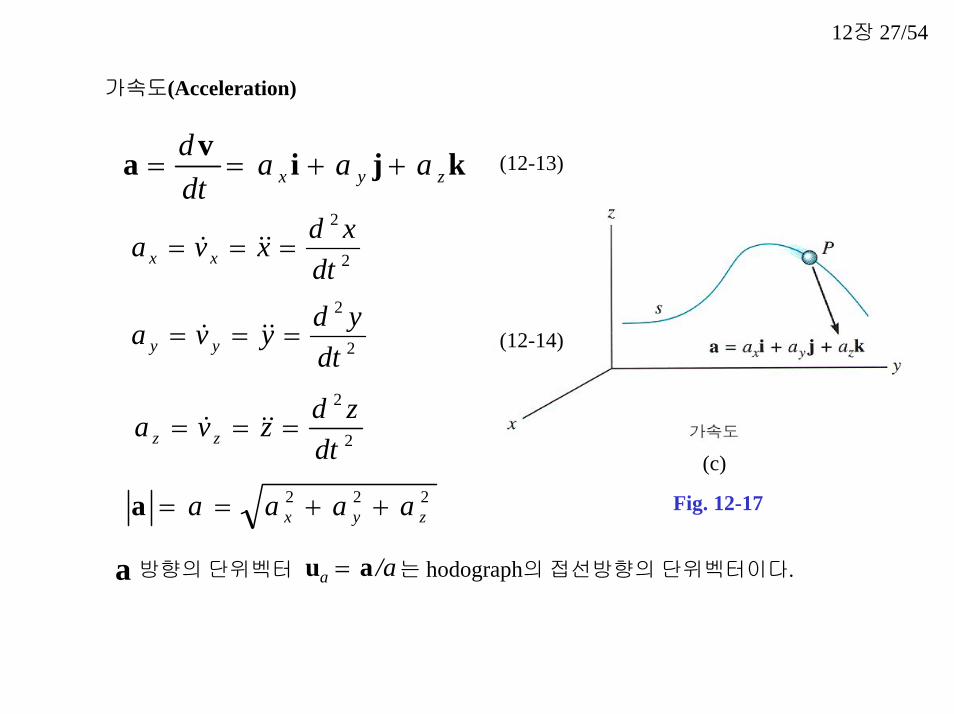
가속도(Acceleration)
kjiva zyx aaadtd
++==
2
2
dtxdxva xx ===
(12-13)
2
2
dtydyva yy ===
(c)
(12-14)
2
2
dtzdzva zz ===
222zyx aaaa ++==a Fig. 12-17
방향의 단위벡터 는 hodograph의 접선방향의 단위벡터이다./a a au =a
12장 28/54
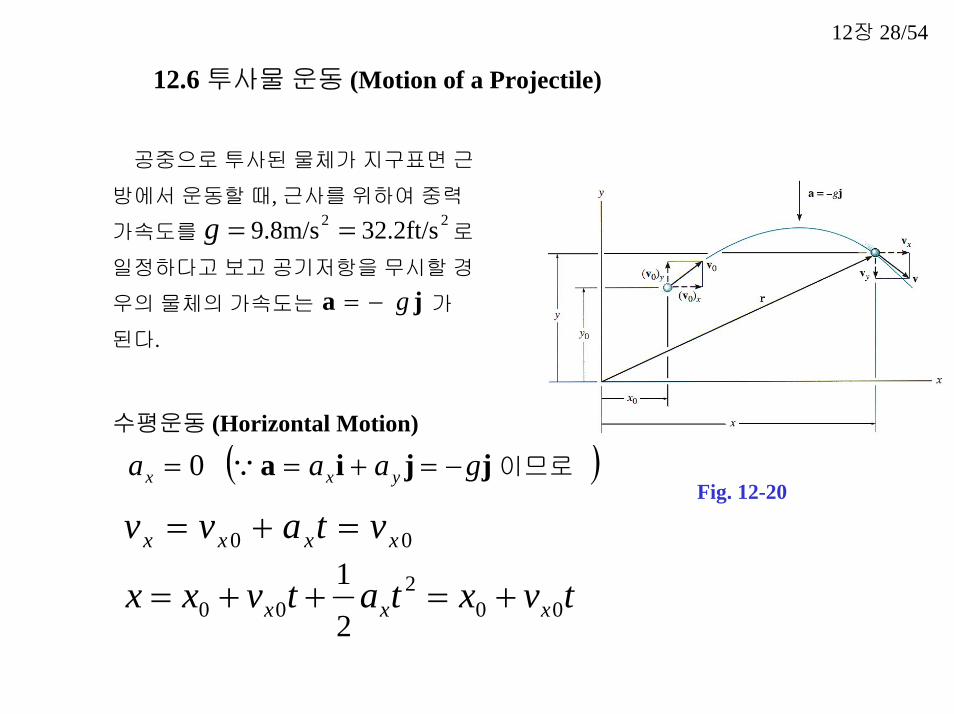
12.6 투사물 운동 (Motion of a Projectile)
공중으로 투사된 물체가 지구표면 근
방에서 운동할 때, 근사를 위하여 중력
가속도를 로
일정하다고 보고 공기저항을 무시할 경
우의 물체의 가속도는 가
된다.
수평운동 (Horizontal Motion)
22 32.2ft/s9.8m/s ==g
ja g−=
( )이므로jjia gaaa yxx −=+== ∵0Fig. 12-20
00 xxxx vtavv =+=
tvxtatvxx xxx 002
00 2
1+=++=

12장 29/54
수직운동 (Vertical Motion) yyyy
y ddyadt
yddt
dga νν
ν===−= ,, 2
2
gtvtavv yyyy −=+= 00
200
200 2
1
2
1 ttvytatvyy gyyy −+=++=
)(2)(2 02
002
02 yygvyyavv yyyy −−=−+=
공식이 많아서 복잡한 듯 보이지만 서로 독립된 두 개의 초기치문제
의 해에 불과하다.002
2
)0(,)0(,0 xvxxxdt
xd===
002
2
)0(,)0(, yvyyygdt
yd==−=
)
주의

12장 30/54
예제 12-4 (Problem 12-77)The motorcycle travels with constant speed along the path that, for a short distance,
take the form of a sine curve. Determine the x and y components of its velocity at any instant on the curve.
0v
문제의 요지
일정한 속력 v0를 가진 오토바이의 sine 곡선경로에서의 속도의 x, y 성분을 구하라.
xcyL
πsin= xxcyLL
)(cos ππ=
xcvvLLxyππ cos=
⎥⎦⎤
⎢⎣⎡ +=+= )(cos)( 222222
0 1 xcvvvvLLxyxππ
21
220 cos)(cos 1
−
⎥⎦⎤
⎢⎣⎡ += xcxcvv
LLLLyππππ
21
220 )(cos)(1
−
⎥⎦⎤
⎢⎣⎡ += xcvv
LLxππ
( 는 언제나 양)xv
( 위치에 따라 는 음이 될 수도 있다.)yv
Prob. 12-77
ANS.

12장 31/54
예제 12-5 (Problem 12-86)The fireman standing on the ladder wishes to direct the flow of water from his hose to the fire at B. Determine two possible angles and at which this can be done. Water flows from the hose at = 300 ft/s .Av 1θ 2θ
60
30
y
300
θx
Prob. 12-86문제의 요지
노즐로부터 300ft/s의 유속으로 분출되는 물이 (60, -30)에 위치한 불길을 잡기위한 노즐각 는?θ
θcos300)0(,0)0(0 === xxxθsin300)0(,0)0( −==−= yygy
인 초기치 문제를 풀면

12장 32/54
60cos3000)0()0( =+=+= θttxxx
3021)sin300(0
21)0()0( 22 −=−−+=−+= gttgttyyy θ
)cos300
60(sin300)cos300
60)(2.32(2130 2
θθ
θ+=
644.0cossin60cos30 2 += θθθ
θθθ 2222 cos)cos1(60)644.0cos30( −=−
두고로 2cos z=θ
zzz )1(60)644.030( 2 −=−
z에 대한 2차 방정식을 풀면
°= 261θ (수평선으로부터 하향) ANS.
°−= 4.892θ (수평선으로부터 상향)

12장 33/54
12.7 곡선운동 : 법선 및 접선성분(Curvilinear Motion : Normal and Tangential Components)
평면위의 곡선은 곡률과 곡률중심이 제각기 다른 원
호들의 조합이라고 볼 수 있다. 이 때 곡선 위의 질점
운동은, 운동의 진행방향 즉 경로의 접선 방향의 단
위벡터 와 질점으로부터 곡률중심을 향하는 방향
의 단위벡터 으로써 나타낼 수 있다.
원운동과 직선운동을 곡률반경이 각각 원의 반경
과 무한대인 곡선운동이라고 볼 수 있다.
주의
tu
nuO
tu
nu
원운동 직선운동
rP
nutu
위치
(a)
(b)곡률반경
ρ(r) : 곡률반경
1/ρ : 곡률
(curvature)
Fig. 12-24
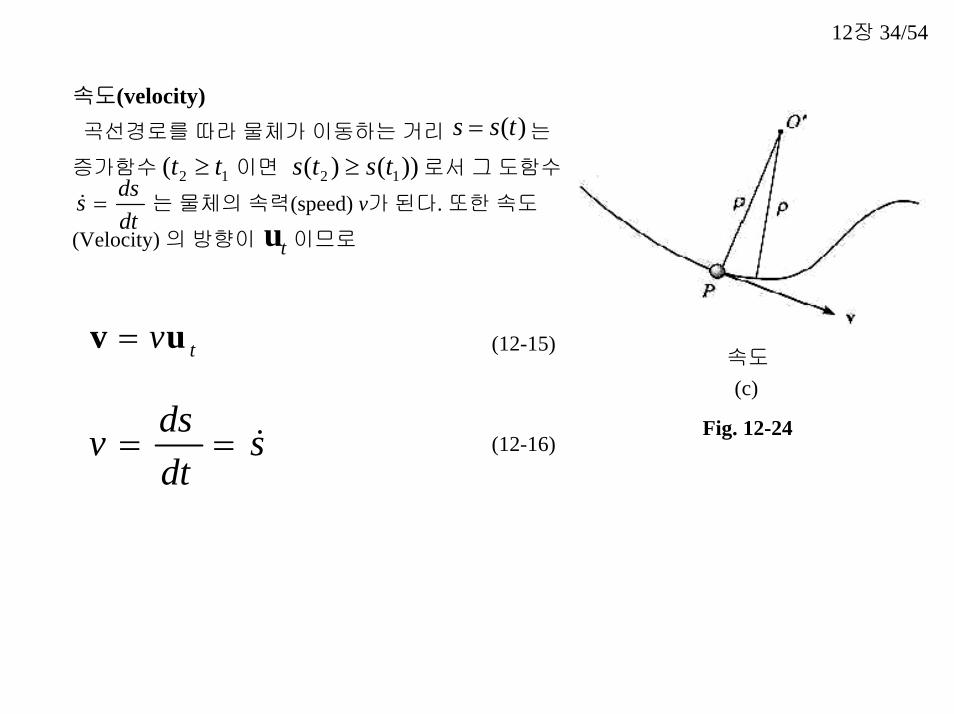
12장 34/54
속도(velocity)곡선경로를 따라 물체가 이동하는 거리 는
증가함수 로서 그 도함수
는 물체의 속력(speed) v가 된다. 또한 속도
(Velocity) 의 방향이 이므로
)(tss =))()(( 1212 tsts tt ≥≥ 이면
dtdss =
tu
tvuv = (12-15)속도
(c)
sdtdsv == Fig. 12-24
(12-16)
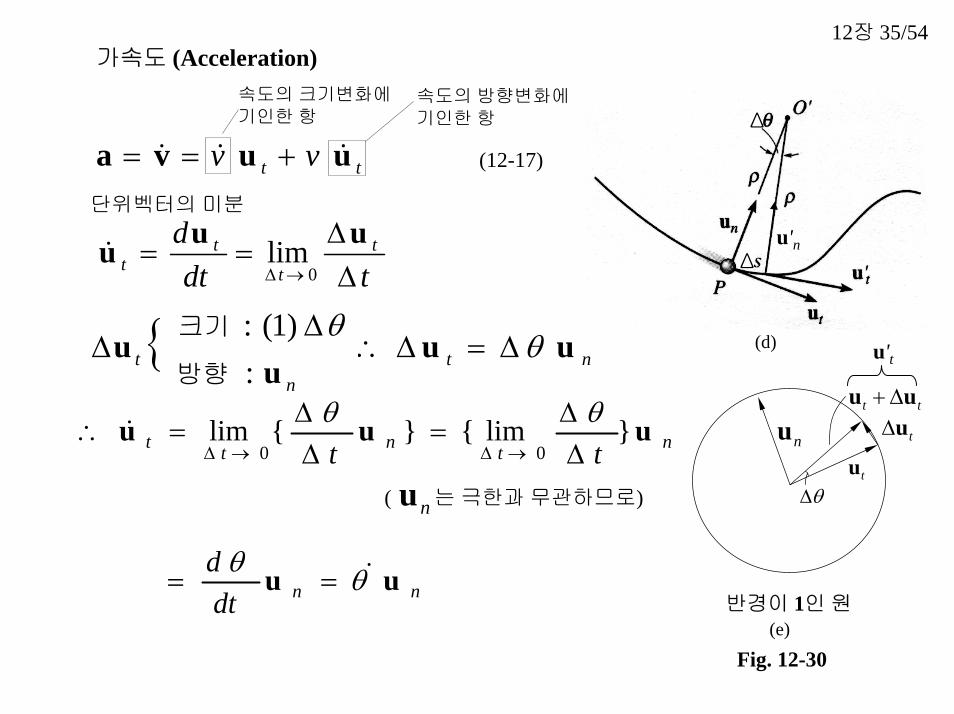
12장 35/54가속도 (Acceleration)
tt vv uuva +==단위벡터의 미분
tdtd t
t
tt ∆
∆==
→∆
uuu0
lim
nu:)1(:
방향
크기 θ∆nt uu θ∆=∆∴{tu∆
nn
ntntt
dtd
tt
uu
uuu
θθ
θθ
==
∆∆
=∆∆
=∴→∆→∆
}lim{}{lim00
( 는 극한과 무관하므로)nu
속도의 크기변화에기인한 항
속도의 방향변화에기인한 항
(12-17)
nutu
tt uu ∆+
tu∆
θ∆
(e)
Fig. 12-30
반경이 1인 원
u't(d)
Δ
Δu'n

12장 36/54
θρθρ === vsdds 이므로또한
22
22
nt
n
t
t
nntt
aaa
vva
dvvdsadsdvv
dtds
dsdv
dtdvvva
aa
+=
===
=∴
====
+=∴
θρρ
θ
uua (12-18)
(12-19)
(12-20)
(12-21)

12장 37/54
주의
직선운동
가속도의 접선 및 법선성분은 각각 속도의 크기 및 방향변화에 기인한 성분들
이다. 따라서 직선운동은 방향을 바꾸지 않으므로(적어도 연속적으로는) 접선
성분만 가진다.
원운동
주의
구심방향은
일정하므로가경우원운동의
이므로
가속도
속도
2
2
)0(
n
nt
nt
t
vv
vv
v
uuua
uu
uv
a
θρθρρρ
θρθρθρθρρ
+=∴=
=+=
+
=
=
=
tu
nuρ
0
(centripetal)
12장 38/54
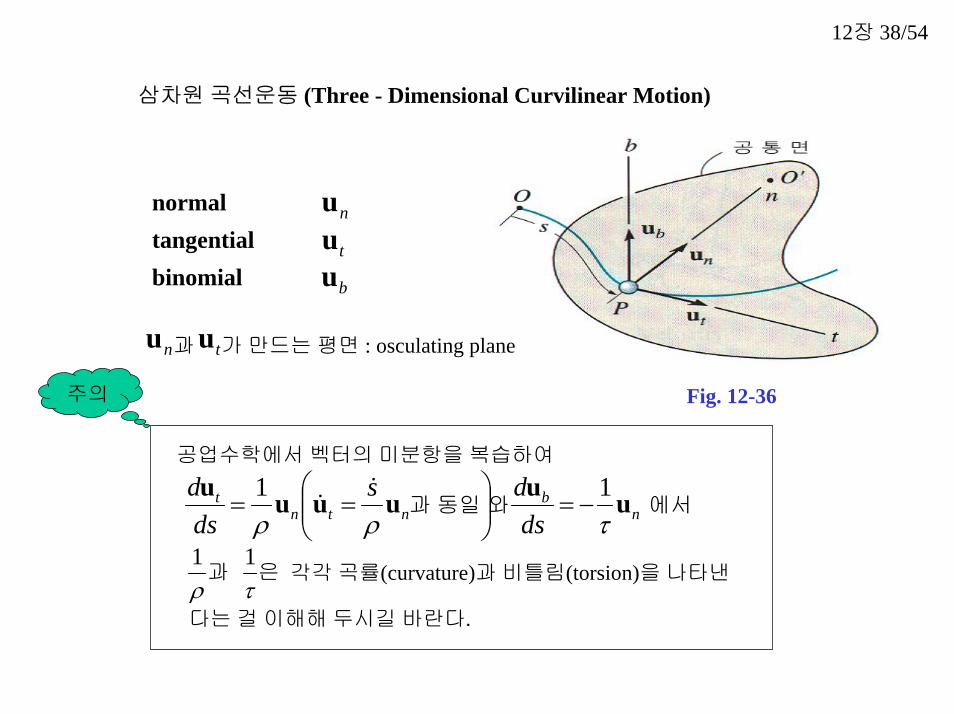
삼차원 곡선운동 (Three - Dimensional Curvilinear Motion)
normal tangential binomial
과 가 만드는 평면 : osculating plane
nutubu
Fig. 12-36
nu tu
주의
공업수학에서 벡터의 미분항을 복습하여
에서와동일과 nb
ntnt
dsds
dsd uuuuuu
τρρ11
−=⎟⎟⎠
⎞⎜⎜⎝
⎛==
각각 곡률(curvature)과 비틀림(torsion)을 나타낸
다는 걸 이해해 두시길 바란다.
은과τρ11

12장 39/54
12.8 곡선운동 : 원주성분(Curvilinear Motion : Cylindrical components)
θ
θu:
)1(:방향
크기 ∆
평면내의 곡선운동은 점의 위치벡터방향의 단위
벡터 과 그 위치벡터의, 기준축으로부터의 좌
표인 가 증가하는 방향의 단위벡터 로 나타
낼 수도 있다.
극좌표 (Polar Coordinate)
rur == rr r ,)(Position위치
rr rr uurv +==)(Velocity속도
tdtd r
t
rr ∆
∆==
→∆
uuu0
lim
θθ uu ∆=∆ r{ru∆
θuθu′θu∆
)(trr uu =
)( ttrr ∆+=′ uu
ru∆θ∆
θ∆
(a)
ruθ θu
(12-22)
∴(b)
Fig. 12-30

12장 40/54
θ
θθ
θ
θθ
u
uuu
=∆∆
=∆∆
=→∆→∆
)lim()(lim00 tt ttr ( 는 극한과 무관하므로)θu
22 )()(
,
θ
θθ
θθ
rrv
rvrvvv
r
rr
+==
==+=∴
v
uuv(c)
(12-23)
(12-24)
(12-25)
∴
rru{
Fig. 12-30(12-26)

12장 41/54
가속도 (Acceleration)
θθθ θθθ uuuuuva rrrrr rr ++++==
tdtd
t ∆∆
==→∆
θθθ
uuu0
lim
ru−∆
:)1(:
방향
크기 θruu θθ ∆−=∆∴{θu∆
222
2
)2()(
2,
θθθ
θθθ
θ
θ
θθ
θ
rrrra
rrarra
aa
r
rr
r
++−==
+=−=
+=−=
a
uuauu
(d)
(12-27)
(12-28)
(12-29)
(12-30)
Fig. 12-30

12장 42/54
각각 각속도와 각가속도라 부른다.을와 θθ
주의
주의
원운동의 경우, 이므로, 따라서
속도는 접선성분만 존재하고 가속도는 중심방향( 방향)성분이
으로서 구심가속도(centripetal acceleration) 라 하고 방향성분이 로
서 접선가속도(tangential acceleration)라 한다. 이 결과는 법선 및 접선성
분에서의 결과와도 일치한다. 어떻게?
θ
θ
θθ
θ
uua
uv
rr
r
r +−=
=2
0== rr일정=r θuru
θr
0
ru− 2θrθrθ

12장 43/54
k =
여기서 는 방향이 고정된 z축 방향의 단위벡터이
므로 라는 사실이 사용되었다.
원주좌표(Cylindrical Coordinate)
극좌표계에서 사용된 단위벡터인 과 에 수직인 를 추가하면 3차
원 공간운동을 나타낼 수 있다.즉,
zr
zr
zrP
zrrrr
zrr
zr
uuua
uuuv
uur
+++−=
++=
+=
θ
θ
θθθ
θ
)2()( 2
zu0=zu
θuru zu
주의Fig. 12-31
(12-31)
(12-32)
직선운동과 평면운동은 3차원운동의 특수한 경우인데 직선운동, 평면운
동을 거쳐 3차원운동을 설명하는 저자의 서술방식은 귀납적이라 할 수 있
다. 이러한 방식은 독자들을 단계적으로 이끌어 줌으로써 쉬운 설명 방법
이라고 볼 수도 있지만, 불필요하게 장황하다고 볼 수도 있으므로 독자들
은 장차 연역적 서술(일반적원리로부터 특수한 경우를 설명하는) 방식에도
익숙해져야 한다.

12장 44/54
주차장에서 내려오는 경사로를 따라 일정한 속력으로 내려오는 자동차의 가속도의 크기를 구하라.
예제 12-6 (Problem 12-153)The automobile is traveling from a parking deck down along a cylindrical spiral ramp at a constant speed of v = 1.5 m/s. If the ramp descends a distance of 12 m for every full revolution, rad, determine the magnitude of the car’s acceleration as it moves along the ramp, r =10m.Hint : For part of the solution, note that the tangent to the ramp at any point is at an angle of from the horizontal. Use this to determine the velocity components and , which in turn are used to determine
and .
문제의 요지
)( m1022 ππ =r
θvzv
vm12ϕ
πθ 2=
)])10(2/[12(tan 1 πφ −= °= 81.10θv zv
θ z
Prob. 12-153
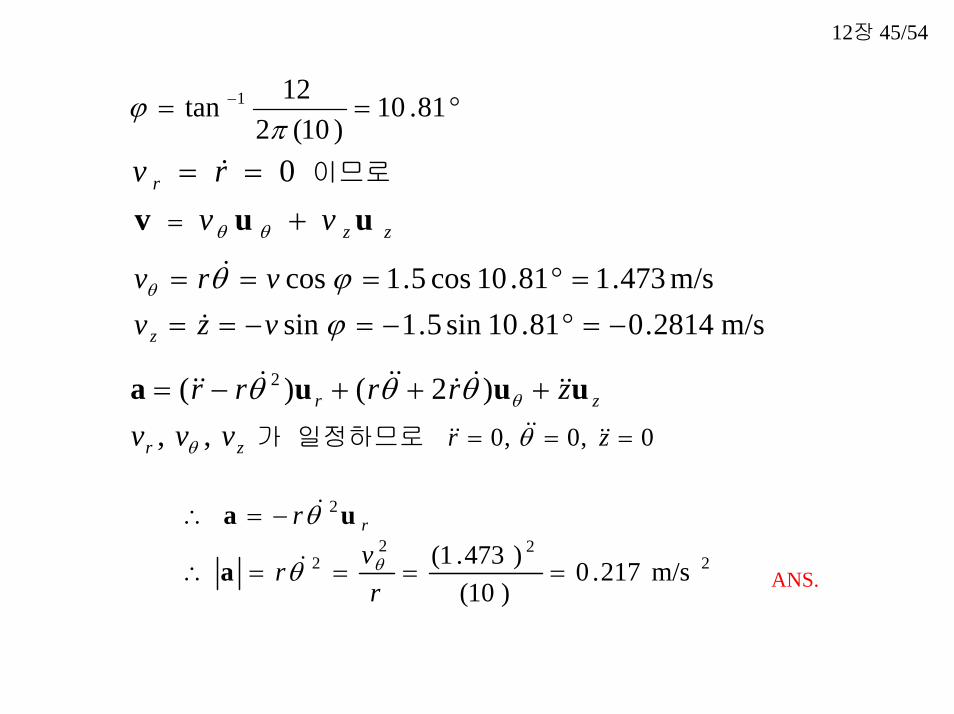
12장 45/54
°== − 81.10)10(2
12tan 1
πϕ
zz
r
vvrv
uuv +==
= θθ
이므로0
m/s2814.081.10sin5.1sinm/s473.181.10cos5.1cos
−=°−=−===°===
ϕϕθθ
vzvvrv
z
0,0,0 ,,)2()( 2
===
+++−=zrzr
zr
vvvzrrrr
θθ
θθθθ일정하므로가
uuua
222
2
2
m/s217.0)10()473.1(
====∴
−=∴
rvr
r r
θθ
θ
a
ua
ANS.

12장 46/54
12.9 두 질점의 종속운동해석(Absolute Dependent Motion Analysis of Two Particles )
두 질점의 운동사이에 구속이 있을 경우
이 구속에 의해 그 운동들은 서로 무관하지
않고 어떤 관계를 가지게 된다. 예를 들면
Fig. 12-36에서 두 블록 A 와 B를 연결한
줄(cord)의 길이가 변치 않는 경우
ABBA
ABBA
TBCDA
aadt
sddt
sd
vvdt
dsdt
dslsls
−==+
−==+
=++
0
,0
2
2
2
2
Fig. 12-36
주의
좌표 와 의 기준점이 다르고 방향도 다르게 정의 되었음을 유의 할 것As Bs
12장 47/54
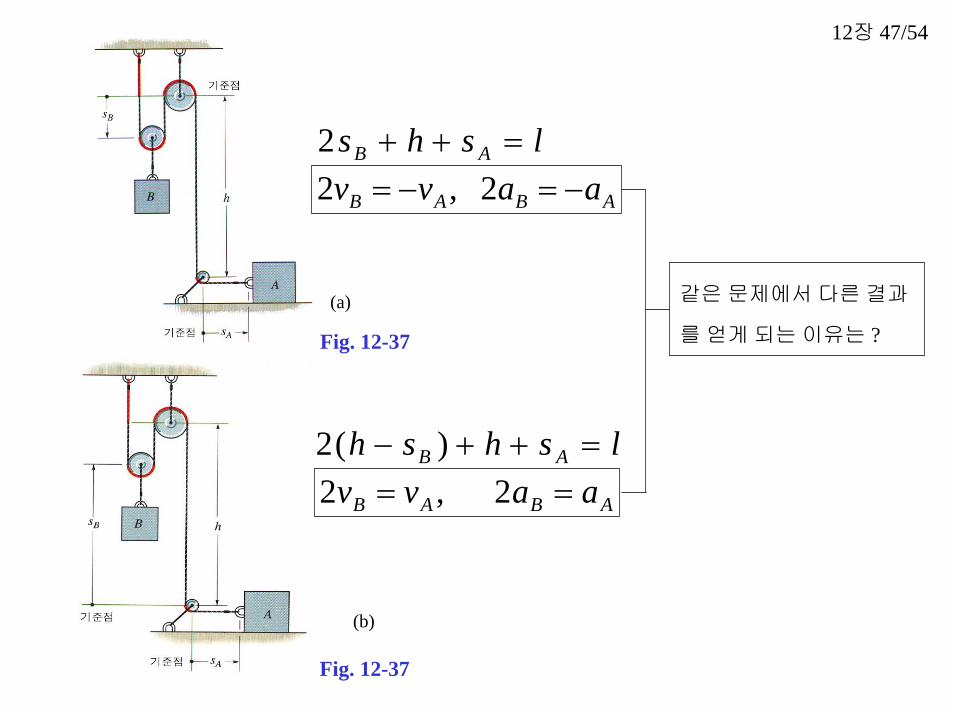
lshs AB =++2
lshsh AB =++− )(2
ABAB aavv == 2,2
ABAB aavv −=−= 2,2
(a)
Fig. 12-37
같은 문제에서 다른 결과
를 얻게 되는 이유는 ?
(b)
Fig. 12-37

12장 48/54
예제 12-7 (Problem 12-178)If the hydraulic cylinder at H draws in rod BC at 2 ft/s, determine the speed of the slider at A.
→=−=∴−=−==+
4ft/sft/s4)2(222
AA
AH
AH
vvvv
lss
ANS.
As
Hs
Prob. 12-178

12장 49/54
12.10 병진축을 이용한 두 질점의 상대운동해석(Relative-Motion Analysis of Two Particles Using Translating Axes)
한 질점의 운동을 나타내기 위하여 단 하나의 기준계를 사용할 수도 있지만
둘 혹은 그 이상의 기준계를 사용하는 것이 편리할 때가 있다. 예를 들면 헬리콥
터의 날개 끝의 운동은 헬리콥터의 운동에다가 헬리콥터에서 봤을 때 원운동하
는 날개 끝의 운동을 합함으로써 구해진다. 이 절에서 다루는 기준계는 고정기
준계이든지 병진기준계이다. 회전기준계에 대한 상대운동은 16장에서 언급할
것이다.
위치(Position)
고정기준계의 원점 O에대한 두 점 B와 A의 위치(점 B와 A의 절대위치)
병진기준계의 원점 A에 대한 질점 B의 위치(점 B의 A에 대한 상대위치)
기준계(frame of reference) : 직교하는 세 축
ABAB /rrr +=
(a)
Fig. 12-42
(12-33)

12장 50/54
속도(Velocity)
vB
vB/A
vA
(b)
ABAB dtd
dtd
dtd
/rrr +=
Fig. 12-42
고정기준계에 위치한 관찰자가본 점 점 B와 A의 속도(점 B와 A의 절대속도)
병진기준계에 위치한관찰자가 본 점 B의 속도(점 B의 A에 대한 상대속도)
ABAB /vvv += (12-34)
12장 51/54
더 자세히 설명하자면 한 벡터를 시간 t에 대해 미분할 때에는 반드시 어느 기준
계에 대한 미분인가를 언급해야 한다. 따라서
병진기준계의 원점 A에 위치한관찰자가 본 점 B의 속도
점 B의 점 A에 대한 상대속도
ABAB /vvv +=
주의
ABOXYZ
AOXYZ
BOXYZ dt
ddtd
dtd
/rrr +=
•=•′′′ zyxAOXYZ dt
ddtd
ABzyxA
AOXYZ
BOXYZ dt
ddtd
dtd
/rrr′′′
+=
zyxA ′′′기준계 는 병진기준계이므로
따라서
(16장에서 더 자세하게 설명)

12장 52/54
가속도(Acceleration)aB/A
aA aB
(c)
ABAB dtd
dtd
dtd
/vvv +=
ABAB /aaa += (12-35)
Fig. 12-42

12장53/54
θρ=
=ρ
x
x'
x"
예제 12-8 (Problem 12-199)At the instant shown, the car at A is traveling at 10 m/s around the curve while increasing its speed at 5 . The car at B is traveling at 18.5 m/s along the straightaway and increasing its speed at 2 . Determine the relative velocity and relative acceleration of A with respect to B at this instant.
속력(v)의 변화율이 주어진 두 차량 A와
B의 상대속도와 상대가속도를 구하라.(기준계 Bxy는 병진기준계이다.)
문제의 요지
Prob. 12-199
=−=−=−−=−=
=°−°=
BAABAB
BABA
BB
AA
vv
//
/ m/s}{
)sin(cos
071.7429.11
4545
vvvvjivvv
ivjiv
ANS.
2m/s2m/s
운전자가 탑승한 기준계 은 A와
함께 병진하면서 각속도 을 가지고
회전하는 기준계이다.
yxA ′′′′
θ
차 A의 운전자(회전과 병진을 겸하는 기준계 Ax″y″에 고
정)가 본 차 B의 속도가 아니라
차 A와 함께 병진하는 기준계 Ax′y′에서 본 차 B의 속도
(16장에서 자세히 공부하게 된다)

12장 54/54
tAtnAnA aa uua +=
2/
2
2
2222
m/s}{
m/s,
m/s}{
sincos)sin(cos
m/s,m/s
24.4828.0
2
243.4828.2
4545
4545
51100
10
jiaaa
ia
jia
jiujiu
−=−=∴
===
−=∴
°−°==°+°−==
=====
BABA
BBBB
A
t
n
AAt
AAn
dtdv
aa
dtdvava
ρ
ANS.
운전자 B (병진하는)가 본 차 A의 가속도.