apunte matematicas 3
DESCRIPTION
Apunte de UTFSM, sobre el ramo matematicas 3.TRANSCRIPT

Universidad Tecnica Federico Santa Marıa
Apuntes MAT023
Fernando Iturbe Pemjean

Indice
1. Prologo 4
2. Desarrollo 62.1. Calculo en varias variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.1.1. Ayudas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.2. Recorrido de una funcion de varias variables . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2.1. Ejemplo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.3. Superficies Cuadraticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3.1. Esfera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.3.2. Paraboloide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.3.3. Cono Elıptico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.3.4. Elipsoide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.3.5. Hiperboloide de una hoja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.3.6. Hiperboloide de dos hojas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.3.7. Paraboloide Hiperbolica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.3.8. Obtener vertices: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.4. Curvas de nivel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.4.1. Ejemplo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.4.2. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.5. Limites en Varias Variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.5.1. Distancia entre dos puntos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.5.2. Bola Abierta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.5.3. Punto Interior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.5.4. Punto Frontera: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.5.5. Region Abierta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.5.6. Region Cerrada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.5.7. Lo que se entiende como lımite . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.5.8. Definicion de Limite en Varias Variables: . . . . . . . . . . . . . . . . . . . . . 152.5.9. Metodos para demostrar la NO existencia de un Limite . . . . . . . . . . . . . 152.5.10. Teorema de Acotamiento (Teorema del Sandwich) . . . . . . . . . . . . . . . . 162.5.11. Desigualdades utiles para resolver lımites . . . . . . . . . . . . . . . . . . . . . 172.5.12. Cambio a Polares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.5.13. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.6. Continuidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.6.1. Observaciones: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.6.2. Algebra de funciones continuas . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.6.3. Funcion compuesta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.6.4. Funciones Vectoriales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.6.5. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.7. Derivadas Parciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.7.1. Definicion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.7.2. En dos variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.7.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.8. Diferenciabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.8.1. Relacion Continuidad - Diferenciabilidad . . . . . . . . . . . . . . . . . . . . . . 222.8.2. Resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.8.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.9. Plano Tangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.9.1. Ecuacion del plano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1

2.9.2. Componentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.9.3. Ecuacion del plano - Derivadas Parciales . . . . . . . . . . . . . . . . . . . . . . 232.9.4. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.10. Derivadas de Orden Superior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.10.1. Derivada Total . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.10.2. Derivadas Parciales Iteradas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.10.3. Eiercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.10.4. Gradiente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.11. Uso de Recta Normal y Plano Tangente . . . . . . . . . . . . . . . . . . . . . . . . . . 262.11.1. Plano tangente para la forma implıcita: . . . . . . . . . . . . . . . . . . . . . . 262.11.2. Ecuacion del plano respecto al Gradiente . . . . . . . . . . . . . . . . . . . . . 262.11.3. Recta Normal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262.11.4. Ejemplo calculo plano tangente . . . . . . . . . . . . . . . . . . . . . . . . . . . 262.11.5. Angulo de inclinacion del plano tangente . . . . . . . . . . . . . . . . . . . . . 272.11.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.12. Derivada Direccional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.12.1. Calcular Vectores unitarios: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.12.2. Ejemplo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.12.3. Producto punto entre dos vectores . . . . . . . . . . . . . . . . . . . . . . . . . 282.12.4. Derivadas direccionales - producto punto . . . . . . . . . . . . . . . . . . . . . 282.12.5. Propiedades de la Derivada Direccional . . . . . . . . . . . . . . . . . . . . . . 292.12.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.13. Regla de la Cadena . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.13.1. En una variable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.13.2. En varias variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.13.3. Definicion General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.13.4. Caso de Segundo Orden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.13.5. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.14. Extremos en Varias Variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.14.1. Definicion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.14.2. Encontrar Maximos y Mınimos candidatos . . . . . . . . . . . . . . . . . . . . . 322.14.3. Puntos Crıticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.14.4. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.15. Hessiano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332.15.1. La matriz Hessiana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332.15.2. En dos variables: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332.15.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.16. Maximos y Minimos condicionados (Lagrange) . . . . . . . . . . . . . . . . . . . . . . 352.16.1. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3. Teorema de la Funcion Implıcita 363.1. En dos variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.2. Teorema General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373.4. Funcion Inversa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.4.1. Condiciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.4.2. Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.4.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2

4. Transformaciones Lineales 404.1. Definicion: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 404.2. Matriz de la Transformacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 404.3. Kernel (nucleo) de la Transformacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414.4. Imagen de la Transformacion Lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414.5. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5. Ecuaciones Diferenciales 435.1. Comparacion entre lo pasado y lo que pasaremos . . . . . . . . . . . . . . . . . . . . . 435.2. ¿Como saber si una funcion es solucion de la Ecuacion Diferencial? . . . . . . . . . . . 435.3. Orden de una ecuacion diferencial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.3.1. Lineal o no lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445.4. Metodos de Resolucion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.4.1. Variables Separables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445.4.2. Resolucion de una Ecuacion Lineal de primer orden . . . . . . . . . . . . . . . 445.4.3. Ecuaciones Homogeneas: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.4.4. Ecuaciones de Bernoulli: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.4.5. Ecuaciones de Ricatti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455.4.6. Reduccion a separacion de variables . . . . . . . . . . . . . . . . . . . . . . . . 455.4.7. Reduccion a Homogeneas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 465.4.8. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5.5. Aplicacion de las Ecuaciones Diferenciales . . . . . . . . . . . . . . . . . . . . . . . . . 465.5.1. Crecimiento Exponencial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 465.5.2. Ley de Enfriamiento de Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5.6. Ecuaciones diferenciales de Orden Superior . . . . . . . . . . . . . . . . . . . . . . . . 475.7. Problema de Valor Inicial (PVI) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.8. ¿Como solucionar ecuaciones lineales de orden superior? . . . . . . . . . . . . . . . . . 475.9. Ecuacion homogenea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485.10. El Wronskiano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485.11. Metodo de reduccion de orden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485.12. Ecuaciones de 2o Orden con coeficientes constantes . . . . . . . . . . . . . . . . . . . . 48
5.12.1. Variacion de Parametros: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 505.12.2. Anuladores (Aniquiladores) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 505.12.3. Tecnicas para obtener el Anulador: . . . . . . . . . . . . . . . . . . . . . . . . . 515.12.4. Ecuaciones exactas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 535.12.5. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
6. Transformada de Laplace 546.1. Razones trigonometricas utiles: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 546.2. Completacion de cuadrados: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 546.3. Funciones Hiperbolicas: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 546.4. Tabla para calcular Transformadas de Laplace elementales: . . . . . . . . . . . . . . . 546.5. Transformada de Laplace para una funcion por tramos: . . . . . . . . . . . . . . . . . 556.6. Primer Teorema de Traslacion: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 556.7. Transformada inversa de Laplace: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
6.7.1. Propiedades: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 556.8. Funcion Heaviside: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 556.9. Funcion Heaviside multiplicada por una funcion: . . . . . . . . . . . . . . . . . . . . . 566.10. Segundo Teorema de Traslacion: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 566.11. En resumen, Teoremas Importantes: . . . . . . . . . . . . . . . . . . . . . . . . . . . . 576.12. Transformada de Laplace en ecuaciones diferenciales: . . . . . . . . . . . . . . . . . . . 57
3
6.13. Convolucion: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 576.14. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
7. Producto Interno de Funciones 597.1. Propiedades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 597.2. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 597.3. Conjunto Ortogonal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 597.4. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
8. Series de Fourier 598.1. Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 598.2. Identidades y Calculos Importantes para agilizar . . . . . . . . . . . . . . . . . . . . . 608.3. Procedimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 608.4. Paridad de Funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
8.4.1. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 628.5. Extensiones par e impar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
8.5.1. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 638.6. Teorema de la convergencia en Series de Fourier . . . . . . . . . . . . . . . . . . . . . . 63
8.6.1. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 638.7. Derivacion e Integracion de Series de Fourier . . . . . . . . . . . . . . . . . . . . . . . 648.8. Identidad de Parseval . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
8.8.1. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 648.9. Integrales de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
8.9.1. Convergencia de la integral de Fourier . . . . . . . . . . . . . . . . . . . . . . . 658.9.2. Integrales de Fourier de Cosenos y Senos . . . . . . . . . . . . . . . . . . . . . . 658.9.3. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
9. Transformada de Fourier 669.1. Aplicaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 669.2. Definicion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 669.3. Linealidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 669.4. Teoremas Importantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
9.4.1. Escalamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 669.4.2. Simetrıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 669.4.3. Desplazamiento en t . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 669.4.4. Desplazamiento en w . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 669.4.5. Diferenciacion en t . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 679.4.6. Integracion en t . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 679.4.7. Diferenciacion en w . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 679.4.8. Integracion en w . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
9.5. Producto Convolucion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 679.5.1. Definicion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 679.5.2. Propiedades de la Convolucion . . . . . . . . . . . . . . . . . . . . . . . . . . . 679.5.3. Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
9.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4

1. Prologo
Este Apunte fue realizado clase a clase durante el semestre, resumiendo lo pasado para ası tenerun documento de donde estudiar todo de manera ordenada y clara, puesto que hasta este momentono existe ningun texto oficial para el curso.Se intento explicar cada topico de la manera mas clara posible con un lenguaje no tan matematico,como suele ocurrir en la gran mayorıa de los textos, para ası ser mas entendible para el alumno.La idea de este apunte es que sea una guıa en el transcurso del curso con el cual el estudiante puedacomprender lo que se va pasando clase a clase mediante ejercicios desarrollados y planteados, el cualno deja de lado los textos disponibles para la materia, pero puede ser un material de mano de usodiario.
Fernando Iturbe PemjeanEstudiante Ingenierıa Civil [email protected]
5

2. Desarrollo
2.1. Calculo en varias variables
El dominio de una funcion en palabras simples son los valores que pueden tomar las variables talesque se cumplan las condiciones dependiendo de la estructura de la funcion.
2.1.1. Ayudas
Si se tiene una funcion definida como ab entonces su dominio estara restringido omitiendo los
valores en los cuales b da cero.
Si una funcion viene definida por√a, entonces para que este definida en los reales, a siempre
debe ser mayor o igual a cero (a ≥ 0).
Si la funcion esta definida por un logaritmo natural ln(a), entonces a debe ser distinto de cero,ya que el logaritmo natural es indefinido en ese valor.
2.2. Recorrido de una funcion de varias variables
Son los valores que toma la funcion, dependiendo el caso pueden ser todos los reales, solo lospositivos, negativos o con mas restricciones.
2.2.1. Ejemplo:
f(x, y) =√
1− x2 − y2
En este caso, como tenemos una raız cuadrada, todo su interior debe ser estrictamente mayor o iguala cero, entonces:
1− x2 − y2 ≥ 0
x2 + y2 ≤ 1
Que es el dominio de nuestra funcion, lo cual si lo graficamos:
Es decir, la funcion puede tomar todos los valores de cada par de puntos (x, y) pertenecientes al circulox2 + y2 ≤ 1.Sea f(x, y) = z, ahora bien el recorrido de la funcion vendra dado por:
z =√
1− x2 − y2
Si z ≥ 0, elevamos al cuadrado:
z2 = 1− x2 − y2
6

Ordenando:
x2 + y2 + z2 = 1
Lo cual es una esfera, con el siguiente grafico:
Pero recordemos que restringimos z ≥ 0, entonces la grafica quedara de la siguiente manera:
Es decir, la mitad positiva de la esfera, formalmente:Rec(f) = [0, 1]
2.3. Superficies Cuadraticas
Ecuacion General:
Ax2 +By2 + Cz2 +Dz = E
2.3.1. Esfera
Ecuacion:
x2 + y2 + z2 = a2
Grafica:
7

2.3.2. Paraboloide
Ecuacion:
z =x2
a2+y2
b2
Grafica:
2.3.3. Cono Elıptico
Ecuacion:
z2
c2=x2
a2+y2
b2
Grafica:
2.3.4. Elipsoide
Ecuacion:
x2
a2+y2
b2+z2
c2= 1
Grafica:
8

2.3.5. Hiperboloide de una hoja
Ecuacion:
x2
a2+y2
b2− z2
c2= 1
Grafica:
2.3.6. Hiperboloide de dos hojas
Ecuacion:
z2
c2− x2
a2− y2
b2= 1
Grafica:
2.3.7. Paraboloide Hiperbolica
Ecuacion:
y2
b2− x2
a2=z
c
Grafica:
9

2.3.8. Obtener vertices:
Para obtener los respectivos vertices de las conicas una forma simple de obtenerlos es borrandouna de las variables y calcular el vertice la ecuacion que queda, por ejemplo:
f(x, y) = x2 + 2y2
si borramos la variable x de la funcion, nos quedara f(x, y) = 2y2, lo cual es una parabola con verticeen (0, 0), analogamente lo mismo pasa borrando la variable y.O bien si dejamos la ecuacion de la conica en su forma general:
x2
a2+y2
b2= 1
los respectivos vertices de la conica seran a para el eje x y b para el eje y.
2.4. Curvas de nivel
El conjunto de puntos en el plano donde la funcion f(x, y) tiene un valor constante f(x, y) = c, elconjunto de todas las curvas de nivel conforman la grafica de f(x, y).Para obtener las respectivas curvas de nivel hay que asignarles valores arbitrarios a c para ver como esel comportamiento de la funcion en ese numero (Lo ideal), realizarlo las veces que sea necesario parasaber completamente la forma de la grafica de la funcion.
2.4.1. Ejemplo:
f(x, y) = 100− 4x2 − 2y2
Es decir: c = 100 − 4x2 − 2y2, para que se haga mas simple el calculo hay que tomar valores con loscuales quede una ecuacion simple, por ejemplo c = 50:
50− 100 = −4x2 − 2y2
50 = 4x2 + 2y2
50
4= x2 +
y2
2
Lo cual si lo graficamos es una elipse.Ahora bien si elegimos c = 100, nos dara un punto, el cual veremos que sera la cuspide de nuestragrafica, si seguimos dando valores arbitrarios a c nos daremos cuenta que se formaran solo elipses dedistintos tamanos, que mientras nos acercamos a el valor 100, el tamano de estas ira disminuyendo,en conjunto todas las curvas de nivel quedaran de la siguiente forma:
10

Luego para hacer la grafica de de esta funcion debemos ver cual es su forma, ya que puede que enalgunos casos con tan solo las curvas de nivel pueden haber muchas superficies cuadricas candidatas.Para saber la forma que toma debemos eliminar una de las variables y ver la grafica formada, porejemplo en el caso anterior si y = 0, nos queda:
f(x, y) = 100− 4x2
Lo cual es una parabola hacia abajo con vertice en (0, 100):
Por lo tanto la grafica sera la de un Paraboloide:
La recomendacion es ir utilizando los metodos que nos pueden ser utiles para esbozar correctamentela grafica, ya sea utilizando curvas de nivel, graficando eliminando una variable o ambas.Para una funcion en tres variables, es decir, f(x, y, z) ya no es posible hacer una grafica visual, peropodemos visualizar las superficies de nivel, es decir, como se va comportando la funcion dependiendoen cuanto valga f(x, y, z), que desde ahora lo nombraremos como c, f(x, y, z) = c.Se debe hacer lo mismo que en el caso de las curvas de nivel, ir dando valores adecuados a c e ir viendocomo la grafica se comporta.Por ejemplo:
f(x, y, z) = x2 + 4y2 + 9z2
Si c = 0, entonces (x, y, z) = (0, 0, 0), es decir, es un punto.Si c = 36:
36 = x2 + 4y2 + 9z2
x2
36+y2
9+z2
4= 1
Lo cual es una Elipsoide:
11

Ahora bien si c = 72, veremos que el volumen de la elipsoide aumenta:
Sabemos que si un punto x0 pertenece al Dominio de la funcion, entonces se puede calcular el valorde f(x0), pero si x0 no pertenece al dominio, necesitamos saber que pasa cerca de x0 en la funcion.Por ejemplo en el caso de la funcion:
f(x, y) =x2y
x2 + y2
¿Que pasa con f(x, y) si (x, y) tiende a (0, 0)?Responderemos esta pregunta en la siguiente seccion.
2.4.2. Ejercicios
1. Hallar grafica de:
a) f(x, y) = e1−x2+y2
b) f(x, y) = arcos(|x|+ |y| − 1)
c) f(x, y, z) = x2
4 + y2
16 + z2
25
12
2.5. Limites en Varias Variables
2.5.1. Distancia entre dos puntos
En R2 si tenemos dos puntos: P (x0, y0) y Q(x1, y1), tendremos que la distancia que los separaviene dada por:
d(P,Q) =√
(x1 − x0)2 + (y1 − y0)2
En Rn con dos puntos: P (x0, x1, x2, . . . , xn) y Q(y0, y1, y2, . . . , yn):
d(P,Q) =√
(x0 − y0)2 + (x1 − y1)2 + (x2 − y2)2 + · · ·+ (xn − yn)2
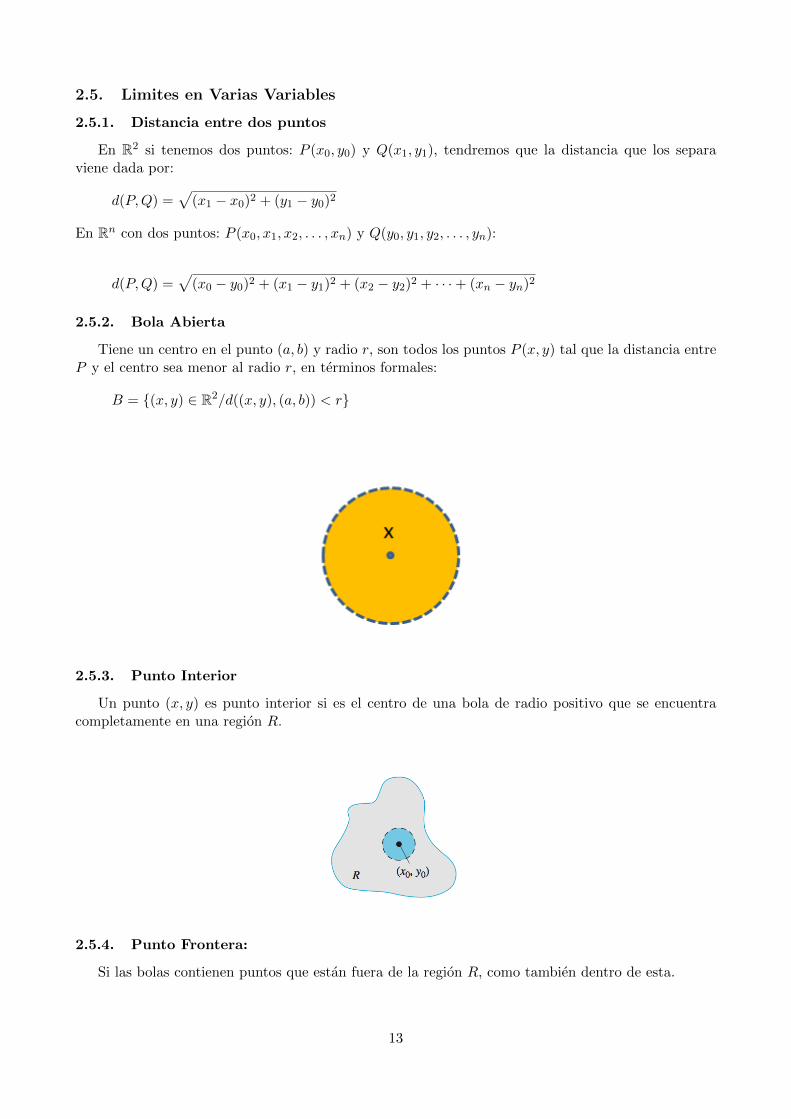
2.5.2. Bola Abierta
Tiene un centro en el punto (a, b) y radio r, son todos los puntos P (x, y) tal que la distancia entreP y el centro sea menor al radio r, en terminos formales:
B = {(x, y) ∈ R2/d((x, y), (a, b)) < r}
2.5.3. Punto Interior
Un punto (x, y) es punto interior si es el centro de una bola de radio positivo que se encuentracompletamente en una region R.
2.5.4. Punto Frontera:
Si las bolas contienen puntos que estan fuera de la region R, como tambien dentro de esta.
13

2.5.5. Region Abierta
Si consta solo de puntos interiores
2.5.6. Region Cerrada
Si contiene todos sus puntos frontera.
2.5.7. Lo que se entiende como lımite
Cuando le aplicamos el lımite a una funcion lo que nos esta dando es a que valor tiende lafuncion para un cierto valor a la que tienden sus variables, esto nos sirve para calcular a que valortiende la funcion en una cierta area donde tiene un agujero, es decir, no esta definida.
14

2.5.8. Definicion de Limite en Varias Variables:
lım(x,y)→(x0,y0)
f(x, y) = L
Se dice que este lımite existe si para cada numero ε > 0 existe un numero correspondiente δ > 0 talque para todo (x, y) en el dominio de f se cumpla que:
|f(x, y)− L| < ε
Siempre que:
0 <√
(x− x0)2 + (y − y0)2 < δ
En resumen, si la distancia entre la funcion y L es pequena siempre que la distancia de (x, y) a (x0, y0)sea suficiente pequena (pero no cero).
2.5.9. Metodos para demostrar la NO existencia de un Limite
Limites Iterados:Si tenemos:
lım(x,y)→(x0,y0)
f(x, y)
Lo que debemos hacer es separarlo en dos limites:
lım(x→x0
( lımy→y0
f(x, y)) = L1
lımy→y0
( lımx→x0
f(x, y)) = L2
Si L1 6= L2 podemos afirmar que el lımite no existe, en cambio si L1 = L2, NO se puedensacar conclusiones al respecto.
Acercamiento por Rectas y Curvas:La idea de este metodo es encontrar una curva adecuada con la cual se pueda acercar de lamejor forma, dependiendo de la estructura de la funcion se aproxima por algun tipo de curva enparticular, para utilizar este metodo se debe reemplazar una de las variables por la curva por laque se quiere acercar (por ejemplo: y = mx, y = mx2, y = m
√x, etc), luego de esto desarrollar
algebraicamente el limite que ahora sera de una variable, luego el limite puede que quede enfuncion de la pendiente m, ahora bien si le damos valores arbitrarios a m y da resultados distintoso bien si el resultado queda dependiendo de m, entonces el lımite no existePor ejemplo:
lım(x,y)→(0,0)
3xy2
x2 + y4
15

Para que nos quede justo un x2 arriba y abajo factorizado y podamos simplificarlo nuestra curvade acercamiento sera: y = m
√x, ahora bien sustituyendo:
lımx→0
3xm2x
x2 +m4x2= lım
x→0
3x2m2
x2(1 +m4)
lımx→0
3x2m2
x2(1 +m4)=
3m2
1 +m4
Si m = 0, entonces el limite vale 0.Si m = 1, entonces el limite vale 3
2Como los valores de los limites son distintos, entonces el limite no existe.
2.5.10. Teorema de Acotamiento (Teorema del Sandwich)
Si tenemos tres funciones:
g(x, y) ≤ f(x, y) ≤ h(x, y)
y tambien se tiene que:
lım(x,y)→(x0,y0)
g(x, y) = lım(x,y)→(x0,y0)
h(x, y) = L
Entonces:
lım(x,y)→(x0,y0)
f(x, y) = L
Importante: Si un limite existe se debe DEMOSTRAR, ya sea por acotamiento odefinicion.Se tiene por definicion que:
|f(x, y)− L| < ε
Entonces se tendra que:
0 ≤ |f(x, y)− L| ≤ | . . . |
Aquı es donde se deben realizar las respectivas acotaciones a la funcion para obtener otra que seamayor o igual a la que estamos acotando y ası encontrar dos funciones, en este caso el cero que esgenerado por el valor absoluto y otra funcion que tiendan a un mismo valor, si esto ocurre, entoncespodemos afirmar que el limite existe y vale cero (o el valor al que tienden las dos funciones mencio-nadas).
Ejemplo:
lım(x,y)→(0,0)
x2y
x2 + y2
Para acotar esta funcion lo recomendable es quitarle el y2 del denominador y ası el valor de esta seramayor, entonces nos quedara:
0 ≤ | x2y
x2 + y2| ≤ |x
2y
x2|
16

Lo cual simplificando queda:
0 ≤ | x2y
x2 + y2| ≤ |y|
y como:
lım(x,y)→(0,0)
|y| = 0
Ya tenemos las dos funciones que tienden al mismo valor y por lo tanto podemos concluir que:
lım(x,y)→(0,0)
x2y
x2 + y2= 0
2.5.11. Desigualdades utiles para resolver lımites
2ab ≤ (a+ b)2
(a+ b)2 ≤ 2(a2 + b2)
sen(x) ≤ 1
|sen(x)| ≤ |x|
cos(x) ≤ 1
ab+c <
ab para a, b, c > 0.
|x| ≤ ||~x||
xy ≤ x2+y2
2
2.5.12. Cambio a Polares
Se realiza el siguiente cambio de variables:
x = rcos(θ)
y = rsen(θ)
x2 + y2 = r2
Sirve para resolver lımites tales como:
lım(x,y)→(0,0)
sen(x2 + y2)
x2 + y2
2.5.13. Ejercicios
1. Hallar si existen los limites a (x, y)→ (0, 0) de las siguientes funciones:
a) f(x, y) = 3xy2
x2+y4
b) f(x, y) =3√xy2x+y3
c) f(x, y) = x2sen(y)2x2+y2
d) f(x, y) =7x3√y
x4+y2
17

e) f(x, y) = x4y2
x4+y4
f ) f(x, y) = x3+4x2+y2
2x2+y2
g) f(x, y) = 8xy3
x2+8y6
h) f(x, y) = x(cos(y)−1)x3+y3
i) f(x, y) =ln(√x2+y2)
(x2+y2)
18

2.6. Continuidad
Una funcion f(x, y) es continua en el punto (x0, y0) si:
1. f esta definida en (x0, y0)
2. lım(x,y)→(x0,y0) f(x, y) existe
3. lım(x,y)→(x0,y0) f(x, y) = f(x0, y0)
2.6.1. Observaciones:
Una funcion es continua si es continua en todos los puntos.
Se dice discontinua si es no continua en algun punto del dominio
Si f es discontinua en x0 y existe lımite en x0 se dice reparable.
2.6.2. Algebra de funciones continuas
Siendo f y g funciones continuas y α ∈ R, entonces son continuas:
1. f + g
2. αf
3. fg
4. fg
2.6.3. Funcion compuesta
Sean f y g funciones continuas:
f : D ⊆ Rn 7→ Rm
g : A ⊆ Rn 7→ Rn
Entonces la compuesta f(g(~x)) es continua si f es continua en g( ~x0) y g es continua en ~x0 ∈ A
2.6.4. Funciones Vectoriales
Si tenemos la funcion:
F : D ⊆ Rn 7→ Rm ~x 7→ F (~x) = ~y
Con:
~x = (x1, x2, . . . , xn)
~y = (y1, y2, . . . , yn)
Se dice que F es continua en ~x0 ∈ D si lo es en cada componente, por ejemplo:
F : R2 7→ R3 (x, y) 7→ (ex2+y2 , 3x+ y, cos(x2 + y3))
Por algebra de funciones continuas la compuesta de continua es continua y como ex2+y2 , 3x + y y
cos(x2 + y3) son continuas en R2, entonces F es continua en R2.
19

2.6.5. Ejercicios
1. Determinar si son continuas las funciones:
a)
f(x) =
{x2−y2x2+y2
(x, y) 6= (0, 0)
0 (x, y) = (0, 0)
b)
g(x) =
{sen(x2+y2)x2+y2
(x, y) 6= (0, 0)
1 (x, y) = (0, 0)
c)
h(x) =
{x2y3
x2+y2(x, y) 6= (0, 0)
0 (x, y) = (0, 0)
2. Sea F (x, y) = (f(x, y), g(x, y))
f(x) =
{x4yx6+y3
(x, y) 6= (0, 0)
0 (x, y) = (0, 0)
g(x) =
{xy
x2+|y| (x, y) 6= (0, 0)
0 (x, y) = (0, 0)
¿Es continua en cada componente? ¿F es continua en R2?
3. Demuestre usando la definicion que f(x, y) es continua en (a, b)
f(x, y) =
{7(x−a)(y−b)2(x−a)2+(y−b)2 (x, y) 6= (a, b)
0 (x, y) = (a, b)
20

2.7. Derivadas Parciales
2.7.1. Definicion
f : U ⊆ Rn 7→ R
con U un conjunto abierto, se define la derivada parcial como:
∂f
∂xi(~a) = lım
h→0
f(~a+ hei)− f(~a)
h
donde:
ei = (0, 0, 0, . . . , 1, 0, 0) (el 1 esta en el i)
~a = (a1, a2, . . . , an)
Notacion reducida:fxi o fxi(~a)
2.7.2. En dos variables
fx =∂f
∂x(a, b) = lım
h→0
f(a+ h, b)− f(a, b)
h
fy =∂f
∂y(a, b) = lım
k→0
f(a, b+ k)− f(a, b)
k
2.7.3. Ejercicios
1. Sea f(x, y, z) = cos(xz2) + ey2+x
z , hallar ∂f∂x , ∂f
∂y , ∂f∂z
2. Sea:
f(x, y) =
{x+y3
x2+y2(x, y) 6= (0, 0)
0 (x, y) = (0, 0)
Hallar ∂f(0,0)∂x y ∂f(0,0)
∂y
21

2.8. Diferenciabilidad
en funciones:
f : U ⊆ R2 7→ R
Se dice que f es diferenciable en (x0, y0) si las derivadas parciales ∂f∂x , ∂f
∂y existen en V(x0, y0) y si:
lım(h,k)→(0,0)
|f((x0, y0) + (h, k))− f(x0, y0)− (fx(x0, y0) · h+ fy(x0, y0) · k)|√(h)2 + (k)2
= 0
Si f(x, y) = z es una funcion diferenciable en (x0, y0), entonces la parte V(x0, y0) es una superficiesuave.
2.8.1. Relacion Continuidad - Diferenciabilidad
Si f es diferenciable en (x0, y0), entonces f es continua en (x0, y0). (esto te utiliza normalmentede forma contraria, es decir:) Si una funcion no es continua en (x0, y0), entonces f no esdiferenciable en (x0, y0).Importante:Si la funcion f tiene derivadas parciales (continuas) (clase C1), entonces f es diferenciable en x0.Lo anterior es de gran utilidad para evitar acudir a la definicion de diferenciabilidad con limite.Ejemplo:
f(x, y) = cos(xy) + ex2y
Es diferenciable si:
∂f
∂x= −ysen(xy) + 2xyex
2y
Es continua por algebra de funciones continuas
∂f
∂y= −xsen(xy) + x2ex
2y
Es continua por algebra de funciones continuas.Por teorema anterior al ser sus derivadas parciales continuas, entonces la funcion es
diferenciable en todo R2
2.8.2. Resumen
Derivadas Parciales Continuas 7→ Diferenciable 7→ Continua
2.8.3. Ejercicios
1. Determinar si las funciones son diferenciables en el origen:
a) f(x, y) = x2y2
x2+y2
b) f(x, y) = 4xyx2+y2
c) f(x, y) = x|y|32
x2+y2
22

2.9. Plano Tangente
2.9.1. Ecuacion del plano
Ax+By + Cz = D
2.9.2. Componentes
Punto P0 = (x0, y0, z0) perteneciente al plano.
Vector Normal al plano (Perpendicular). ~N = (a, b, c)
Punto P = (x, y, z) arbitrario en el plano
Entonces, al tener dos puntos podemos conformar un vector: ~V = (x − x0, y − y0, z − z0) y como ~Nes normal al plano (entonces al vector ~V ), entonces el producto punto ~V · ~N = 0 lo cual queda de lasiguiente forma:
(x− x0, y − y0, z − z0) · (a, b, c) = 0
a(x− x0) + b(y − y0) + c(z − z0) = 0
ax+ by + cz = ax0 + by0 + cz0
2.9.3. Ecuacion del plano - Derivadas Parciales
Si f es diferenciable en (x0, y0) y f(x0, y0) = z0, la ecuacion del plano tangente a z = f(x, y) en(x0, y0) esta definido por:
π : z = f(x0, y0) +∂f(x0, y0)
∂x(x− x0) +
∂f(x0, y0)
∂y(y − y0)
2.9.4. Ejercicios
1. Hallar ecuacion del plano tangente (si es que existe) de z = x2 + y4 + exy en el punto (1, 0, 2)
2. Hallar si existe ecuacion del plano tangente en donde (x0, y0) = (1, 1) si z = arctg(xy )
23

2.10. Derivadas de Orden Superior
Para funciones Vectoriales:
f : U ⊆ Rn 7→ Rm (x1, x2, . . . , xn) 7→ f(x1, x2, . . . , xn) = (f1(~x), f2(~x), . . . , fn(~x))
2.10.1. Derivada Total
Si existe cada una de las derivadas, se define como:
Df( ~x0) =
∂f1∂x1
∂f1∂x2
· · · ∂f2∂xn
∂f2∂x1
∂f2∂x2
· · · ∂f2∂xn
......
. . ....
∂fm∂x1
∂fm∂x2
· · · ∂fm∂xn
Ejemplo:
f(x, y, z) = (sen(x
y), x2 − y2 − z2)
En este caso:
f : U ⊆ R3 7→ R2
Df( ~x0) =
( 1y cos(
xy ) − x
y2cos(xy ) 0
2x −2y −2z
)2.10.2. Derivadas Parciales Iteradas
∂2f∂x∂y = ∂
∂x(∂f∂y )
∂2f∂y∂x = ∂
∂y (∂f∂x )
∂2f∂x2
= ∂∂x(∂f∂x )
∂2f∂y2
= ∂∂y (∂f∂y )
Si cada una de estas existen y son continuas se dicen de clase C2
Si las derivadas parciales son continuas, entonces se cumple que: ∂2f∂x∂y = ∂2f
∂y∂xNotacion
fxx = ∂2f∂x2
fxy = ∂2f∂y∂x
fyx = ∂2f∂x∂y
fyy = ∂2f∂y2
A demas si existen las derivadas, se pueden realizar derivadas de orden mayor a dos:
∂nf
∂xi∂xj . . . ∂xr
24

2.10.3. Eiercicios
1. Sea f(x, y) = xln(xy)− x3y2, obtener ∂2f∂x2
, ∂2f∂y2
, ∂2f∂x∂y y ∂2f
∂y∂x
2.10.4. Gradiente
Si cada una de las derivadas parciales existe:
Df(~x) =(∂f∂x1
, ∂f∂x2
, . . . , ∂f∂xn
)Se anota en general como :
∇f(~x) =(∂f∂x1
( ~x0),∂f∂x2
( ~x0), . . . , ∂f∂xn ( ~x0))
25

2.11. Uso de Recta Normal y Plano Tangente
Las funciones se deben definir en forma implıcita, es decir, de la forma F (x, y, z) = 0 y si no loestan de esta manera, hay que pasarlas a esta forma igualando a cero la funcion.
2.11.1. Plano tangente para la forma implıcita:
Teniendo una superficie y un punto P0 = (x0, y0, z0) se puede demostrar con derivadas direccionalesy regla de la cadena que ∇F = ~N , es decir se puede usar ∇F o algun vector paralelo a este comoNormal al plano tangente.
2.11.2. Ecuacion del plano respecto al Gradiente
Esta definido como:
Πt : ∇F (p0)(x− x0, y − y0, z − z0) = 0
con F diferenciable y ∇F (p0) 6= 0
2.11.3. Recta Normal
L : ~x ∈ R3/x = P0 +∇F (p0)t
con t ∈ R
2.11.4. Ejemplo calculo plano tangente
Hallar el plano tangente a la superficie z2 − 2x2 − 2y2 = 12 en el punto (1,-1,4).
Primeramente hay que verificar que el punto pertenezca a la superficie, para esto reemplazamosel punto en la ecuacion:
42 − 2(1)2 − 2(−1)2 = 12
Lo cual se cumple, por lo tanto el punto pertenece a la superficie.
Calculamos las derivadas parciales, siendo f(x, y, z) = z2 − 2x2 − 2y2 − 12 = 0
∇f(~p0) =(∂f∂x (~p0),
∂f∂y (~p0) , ∂f∂z (~p0)
)
∇f(~p0) =(−4x, −4y, 2z
)
∇f(1,−1, 4) =(−4, 4, 8
)La ecuacion del plano entonces viene dado por:
Πt : (−4, 4, 8)(x− 1, y − 2, z − 4) = 0
Resolviendo:
Πt : −x+ y + 2z − 6 = 0
26

2.11.5. Angulo de inclinacion del plano tangente
El angulo lo calculamos respecto a las normales de los dos planos, por ejemplo el eje x, y y el planotangente y como las normales son vectores, el angulo entre vectores viene dado por:
~a ·~b||~a||||~b||
= cos(θ)
(Recordar utilizar los valores de los vectores unitarios como las normales de los respectivos planosx, y, z (i = (1, 0, 0), j = (0, 1, 0) y k = (0, 0, 1))
2.11.6. Ejercicios
1. Hallar angulo de inclinacion del plano tangente al elipsoide:
x2
12+y2
12+z2
3= 1
en el punto (2, 2, 1)
2. Hallar la ecuacion del plano tangente a la superficie 5x2 + y2 + 7z2 = 1089 que es ortogonal a larecta tangente en el punto (2, 1, 6) a la curva de interseccion de las superficies: S1: z = x2 + 2y2
S2: z = 2x2 − 3y2 + 1
27

2.12. Derivada Direccional
D~uf( ~x0) = lımh→0
f(a, b) + h(u1, u2)− f(a, b)
h
Si este limite existe, se denomina derivada direccional en la direccion del vector unitario ~u (||~u|| = 1).Ademas si f es diferenciable en ~x0 = (a, b) y ~u es unitario entonces:
D~uf( ~x0)) = ∇f( ~x0) · ~u
Es decir en R2:
D~uf( ~x0)) = (∂f
∂x( ~x0),
∂f
∂y( ~x0)) · ~u
2.12.1. Calcular Vectores unitarios:
Para calcular vectores unitarios: teniendo un vector ~u su vector unitario viene dado por:
~uunitario =~u
||~u||
2.12.2. Ejemplo:
Sea f(x, y) = x2y − 4y3, hallar Df(2, 1) en direccion ~v = (−1, 3)El vector no es unitario, por lo tanto lo debemos calcular:
(−1, 3)√−12 + 32
=(−1, 3)√
10= (−1√10,
3√10
)
Ahora calculamos el gradiente:
∇f = (2xy, x2 − 12y2)
Ahora evaluando en el punto (2, 1):
∇f(2, 1) = (4,−8)
Ahora entonces la derivada direccional viene dada por:
Df = (4,−8)(−1√10,
3√10
) =−4√10−√−24√
10
2.12.3. Producto punto entre dos vectores
Si tenemos los vectores ~A y ~B entonces:
~A · ~B = || ~A|||| ~B||cos(θ)
2.12.4. Derivadas direccionales - producto punto
Con lo mencionado anteriormente:
Df( ~x0) = ∇f( ~x0) · ~u = ||∇f( ~x0)||||~u||cos(θ)
28

2.12.5. Propiedades de la Derivada Direccional
1. La direccion que alcanza Df es maxima cuando cos(θ) = 1, es decir, cuando θ = 0o, o sea endireccion de ∇f( ~x0) y su valor es ||∇f( ~x0)||
2. f decrece mas mas rapidamente en direccion −∇f( ~x0) su valor −||∇f( ~x0)||, es decir cuandoθ = 180o
3. La pendiente nula se obtiene si ~u es perpendicular a ∇f( ~x0).
2.12.6. Ejercicios
1. La temperatura (oC) de una placa metalica esta dada por:
T (x, y) = 20− 4x2 − y2
¿En que direccion a partir del (2,−3) aumenta mas rapido la temperatura ? ¿Cual es la tasa oritmo de crecimiento?
2. Calcular la derivada direccional de:
a) f(x, y) = ln(1 +√x2 + y2) en el punto (1, 2) en direccion hacia el origen.
b) f(x, y) = arctg( xyx2+y2
) en (1,1) en direccion al punto (2, 1)
3. Calcular valores de a, b, c para la derivada direccional f(x, y, z) = axy2 + byz + cz2x si en elpunto (1, 2,−1) tiene un maximo valor igual a 64 en direccion OZ.
4. Demostrar que la funcion f(x, y) tiene derivada direccional en cualquier direccion en (0, 0) sinembargo no es continua en dicho punto.
f(x, y) =
{x2y (x, y) 6= (0, 0)0 (x, y) = (0, 0)
29

2.13. Regla de la Cadena
2.13.1. En una variable
Por ejemplo:
y = f(x) = ex2
con x = 3 cos(t), tenemos tres variables que son dependientes en el siguiente orden: y 7→ x 7→ t, con locual :
dy
dt=dy
dx
dx
dt
Por lo tanto, al cambiar de variable con x = 3 cos(t)
dy
dt= 2xex
22(− sin(t)) = 2 · 3 cos(t)e9 cos
2(t) · −3 sin(t)
2.13.2. En varias variables
Caso 1:Sea w = f(x, y) clase C1 y a su vez x = x(t) y y = y(t)
Se definen:
∂w
∂t=∂w
∂x
∂x
∂t+∂w
∂y
∂y
∂t
Caso 2 (mas variables independientes):
Se definen:
∂w
∂r=∂w
∂x
∂x
∂r+∂w
∂y
∂y
∂r+∂w
∂z
∂z
∂r
∂w
∂s=∂w
∂x
∂x
∂s+∂w
∂y
∂y
∂s+∂w
∂z
∂z
∂s
30

2.13.3. Definicion General
Sean:
g : U ⊆ Rn 7→ Rm
f : V ⊆ Rm 7→ Rp
funciones tales que son diferenciables en U y V respectivamente y se encuentra bien definida fog,entonces:
Dfog( ~x0) = Df( ~y0) ·Dg( ~x0)
Lo cual es un producto de matrices de Derivadas.
2.13.4. Caso de Segundo Orden
Si W = f(x, y) y a su vez x = x(r, θ) e y = y(r, θ), entonces sabemos que si existen y son continuaspodemos hallar ∂w
∂r , ∂w∂θ
Entonces:
∂w
∂r=∂w
∂x
∂x
∂r+∂w
∂y
∂y
∂r
Con lo cual entonces:
∂2w
∂r2=
∂
∂r(∂w
∂r)
Pero no estan al mismo nivel de dependenciaSi g(x, y) = ∂w
∂x , entonces:
∂g
∂r=∂g
∂x
∂x
∂r+∂g
∂y
∂y
∂r
Pero:
∂g
∂x=
∂
∂x(∂w
∂x) =
∂2w
∂x2
∂g
∂y=
∂
∂y(∂w
∂x) =
∂2w
∂x∂y
2.13.5. Ejercicios
1. Sea f(x, y) = (cos(y) + x2, ex+y) y g(x, y) = (eu2, u− sen(v)) Hallar Dfog en (0, 0)
2. ω = f(x− at) + g(x+ at) Demuestre que ∂2ω∂t2
+ a2 = a2 ∂2ω∂x2
31

2.14. Extremos en Varias Variables
2.14.1. Definicion
U un abierto, sea f : U ⊆ Rn 7→ R, se dice que en ~x0 ∈ U hay un mınimo local si existe unavecindad Vx0 tal que:
f( ~x0) ≤ f(x), ∀x ∈ Vx0
Analogamente habra un maximo local en ~y0 si existe una vecindad Vy0 , tal que:
f(~y0) ≥ f(x),∀x ∈ Vy0
2.14.2. Encontrar Maximos y Mınimos candidatos
Una forma es posicionar un plano tangente horizontal, entonces se cumplira que:
∇F = (∂F
∂x,∂F
∂y,∂F
∂z)
Por lo tanto:
∂f
∂x= 0 ∧ ∂f
∂y= 0
Notar que a veces hay maximos o mınimos sin que existan o se anulen sus derivadasparciales.
2.14.3. Puntos Crıticos
Son los probables maximos o mınimos, sera ~x0 un punto critico si:
∂f
∂x(x0) = 0 ∧ ∂f
∂y(x0) = 0
o bien no existen las derivadas parciales en ~x0.
2.14.4. Ejercicios
1. Hallar Maximos y/o mınimos locales de
a) f(x, y) = 2x2 + y2 + 8x− 6y + 20
b) z = 4− (x2 + y2)12
c) f(x, y) = x2y2
d) A = {(x, y, z)/x2 + y2 < 4y, |z| ≤ 3}
32

2.15. Hessiano
Supongamos
f : U ⊆ Rn 7→ R
Clase C2 (Con segundas derivadas parciales continuas en ~x0)
2.15.1. La matriz Hessiana
La matriz Hessiana viene dada por:
Hf( ~x0) =
∂2f∂x21
∂2f∂x1∂x2
· · · ∂2f∂x1∂xn
∂2f∂x2∂x1
∂2f∂2x2
· · · ∂2f∂x2∂xn
......
. . ....
∂2f∂xn∂x1
∂2f∂xn∂x2
· · · ∂2f∂x2n
Evaluada en ~x0, lo que nos interesa son los subdeterminantes obtenidos en ella, los cuales seran unnumero real ya sea 0, positivo o negativo y dependiendo de la Secuencia podremos determinar si esel caso de un punto maximo, minimo, silla, etc.
2.15.2. En dos variables:
f : U ⊆ R2 7→ R
Donde la Matriz queda de la siguiente forma:
Hf( ~x0) =
(∂2f∂x2
∂2f∂x∂y
∂2f∂y∂x
∂2f∂y
)En este caso se puede afirmar de la secuencia de signos en los subdeterminantes de la matriz Hessianaque:
1. {+,+} → en ~x0 hay un mınimo.
2. {-,+} → en ~x0 hay un maximo.
3. { ,-} → en ~x0 hay un punto silla (da lo mismo el signo del primer subdeterminante).
4. {,0} → en ~x0 no se sabe pero se puede visualizar por la grafica.
2.15.3. Ejercicios
1. Encontrar maximos y/o mınimos de
a) f(x, y) = −x2 + 4xy − 2y2 + 1
b) f(x, y) = 2xy − 12(x4 + y4) + 1
c) f(x, y) = xy
d) f(x, y) = e−xsen(y)
e)
f(x, y) =
{ xyx2+y2
(x, y) 6= (0, 0)
0 (x, y) = (0, 0)
33

2. Una caja rectangular tiene uno de sus vertices en (0, 0, 0) y el vertice opuesto sobre el plano :π : 6x+ 4y + 3z = 24, hallar volumen maximo.
3. El volumen de un Elipsoide x2
a2+ y2
b2+ z2
c2= 1 es 4πabc
3 , si se sabe que a+ b+ c es una constante¿Que dimensiones maximizan el volumen?
34

2.16. Maximos y Minimos condicionados (Lagrange)
Cuando nos entregan una funcion condicionada por otras funciones utilizaremos este metodo, porel cual obtendremos los respectivos maximos y mınimos.Teniendo una funcion f y una condicion g,los posibles maximos o mınimos de la funcion se producendonde ∇f es paralelo con ∇g, lo que estamos diciendo con que el gradiente de f y g son paralelos esque uno es combinacion lineal de la otra, entonces:
∇f = λ∇g
Tendremos un sistema de ecuaciones, con lo anterior mas la funcion que nos da la condicion, con locual sacamos los respectivos valores de las variables, para luego evaluarlas en nuestra funcion f y verdependiendo el valor que nos de si es un maximo o un mınimo.En el caso que tengamos mas condiciones es basicamente lo mismo, solo que tendremos mas incognitasy mas ecuaciones en nuestro sistema.
2.16.1. Ejercicios
1. Sea f(x, y) = xy sujeta a la condicion x2 + y2 = 1 hallar valores extremos.
2. Encontrar extremos de la funcion temperatura en (x, y, z), T (x, y, z) = 18 + 2x+ 2y + z2 sujetaa las condiciones de estar en la esfera x2 + y2 + z2 = 11 y el plano x+ y + z = 3
3. Determinar las distancias mınmas y maximas de los puntos del elipsoide x2
96 + y2
64 + z2
64 = 1 alplano π : 6x− y + 3z = 576
35

3. Teorema de la Funcion Implıcita
3.1. En dos variables
Se puede hallar una funcion z = f(x, y) de la siguiente forma:Por ejemplo:Si tenemos x2 + y2 = 1, debemos dejar la funcion igualada a cero, entonces F (x, y) = x2 + y2− 1 = 0,entonces obtenemos:
dy
dx=−dFdxdFdy
3.2. Teorema General
Si tenemos Fm) funciones dependientes de m variables, entonces si :
∂(F1, F2, . . . , FM )
∂(z1, z2, . . . , zm)6= 0
Es decir:
=
∂F1∂z1
∂F1∂z2
. . . ∂F1∂zm
∂F2∂z1
∂F2∂z2
. . . ∂F2∂zm
∂F3∂z1
∂F3∂z2
. . . ∂F3∂zm
∂Fm∂z1
∂F1∂z2
. . . ∂F1∂zm
6= 0
Si esto se cumple entonces sera posible despejar cada una de las zi en terminos de las x1, x2, . . . , xn.y sabemos que:
dzidxj
=
−d(F1,F2,...,Fm)dz1,z2,...,zn
−d(F1,F2,...,Fm)dz1,z2,...,zn
Para que se pueda despejar se debe cumplir:
1. Derivadas parciales continuas (la funcion sea clase C∞).
2. El punto P0 debe pertenecer a la superficie (F (P0) = 0).
3. Jacobiano distinto de cero en P0
Pasos
1. Se despejan las funciones dejandolas igualadas a cero.
2. Verificar que el punto P0 dado pertenece a la superficie.
3. Calcular el Jacobiano en el punto, este debe ser distinto de cero.
4. Hallar las respectivas derivadas, por ejemplo:
∂u
∂x=−∂(F,G)
∂(x,v)
∂(F,G)∂(u,v)
∂v
∂y=−∂(F,G)
∂(u,y)
∂(F,G)∂(u,v)
36

3.3. Ejercicios
1. ¿Es posible despejar z de la ecuacion 4cos(xy)− 2z3 − 4xy2z = 2 cerca de (0, 1, 1)?
2. Determinar si es posible despejar z = f(x, y) de la ecuacion exy2 − z4 + arctg(xz) = 0 ¿Cerca de
que puntos? ¿Cual serie el valor de ∂z∂x y ∂z
∂y?
3. Demuestre que el sistema{xu+ yvu2 = 2xu3 + y2v4 = 2
Se puede resolver de unica manera con funciones u y v dependientes de x e y cerca de (1, 1, 1, 1)
4. Sea ω = f(x− at) + g(x+ at), demostrar:
∂2ω
∂t2+ a2 = a2
∂2ω
∂x2
5. Sea la ecuacion sen(yz) + sen(xz) + sen(xy) = 0
a) ¿Existe algun punto P0(x0, y0, z0) y vecindad de P0 de modo que sea posible despejarz = f(x, y)?
b) Hallar ecuacion plano tangente a la superficie z = f(x, y) en P0 = (1, 0, 0)
c) ∂2z∂y2
37

3.4. Funcion Inversa
3.4.1. Condiciones
1. Se deben tener funciones despejadas.
2. El Jacobiano en el punto debe ser distinto de cero.
Si se tiene que:
∂(u, v)
∂(x, y)=
(∂u∂x
∂u∂y
∂v∂x
∂v∂y
)
La inversa sera:
∂(x, y)
∂(u, v)= [
∂(u, v)
∂(x, y)]−1 =
1∂(u,v)∂(x,y)
( ∂v∂y −∂u
∂y
− ∂v∂x
∂u∂x
)
Lo ultimo es la Traspuesta (en una matriz de 2x2 se cambian de lugar la diagonal y la otra se lecambian los signos.
3.4.2. Ejemplo
Dadas las ecuaciones:x = u+ 2vy = 3u2 + v2
z = u3 + v3
1. Diga las condiciones para las cuales exista la superficie z = f(x) obtenida de las ecuacionesdadas.
2. Encuentre la ecuacion del plano tangente a la superficie z = f(x) donde u = 1 y v = 2.
Desarrollo
1. Utilizando el Teorema de la Funcion Inversa, primero debemos notar que las funciones sonpolinomios y por lo tanto son de clase C1, es decir, existen sus derivadas parciales, con ellodebemos calcular el Jacobiano, el cual debe ser distinto de cero:
∂(x, y)
∂(u, v)=
∣∣∣∣∂x∂u ∂x∂v
∂y∂u
∂y∂v
∣∣∣∣ =
∣∣∣∣ 1 26u 2v
∣∣∣∣ = 2v − 12u 6= 0→ v 6= 6u
Entonces si v 6= 6u es posible despejar z = f(x, y) = u3 + v3
2. Para calcular el plano tangente, el cual su ecuacion viene dada por:
z − z0 = fx(x0, y0)(x− x0) + fy(x0, y0)(y − y0)
Necesitamos obtener (x0, y0, z0) como tambien fx y fy, entonces obtengamos los valores del puntoevaluando en las ecuaciones dadas con u = 1 y v = 2:x0 = 1 + 2 · 2 = 5y0 = 3 · 1 + 22 = 7z0 = 13 + 23 = 9Ahora para calcular fx y fy sabemos por regla de la cadena que:fx = fuux + fvvx
38

fy = fuuy + fvvy
Para calcular ux, vx, uy, vy tenemos ∂(x,y)∂(u,v) :
∂(x, y)
∂(u, v)=
∣∣∣∣∂x∂u ∂x∂v
∂y∂u
∂y∂v
∣∣∣∣ =∂(x, y)
∂(u, v)=
∣∣∣∣ 1 26u 2v
∣∣∣∣Aplicamos la inversa, recordemos que la matriz inversa es igual a la matriz adjunta de la tras-puesta divido por el determinante (por esto el Jacobiano tiene que ser distinto de cero)
(∂(x, y)
∂(u, v))−1 =
∂(u, v)
∂(x, y)=
1
2v − 12u
∣∣∣∣∣ ∂v∂y −∂x
∂v
− ∂y∂u
∂u∂x
∣∣∣∣∣ =1
2v − 12u
∣∣∣∣ 2v −2−6u 1
∣∣∣∣Ahora evaluamos en u = 1 y v = 2:
1
2v − 12u
∣∣∣∣ 2v −2−6u 1
∣∣∣∣ = −1
8
∣∣∣∣ 4 −2−6 1
∣∣∣∣ =
∣∣∣∣−12
14
34 −1
8
∣∣∣∣ =
∣∣∣∣∣∂u∂x ∂u∂y
∂v∂x
∂v∂y
∣∣∣∣∣Teniendo los valores, ahora solo nos falta obtener fu y fv:
f = u3 + v3
fu = 3u2 = 3
fv = 3v2 = 12
Entonces:
fx = 3−1
2+ 12
3
4=
15
2
fy = 31
4+ 12
−1
8= −3
4
Por lo tanto el plano tangente es:
z − 9 =15
2(x− 5)− 3
4(y − 7)
3.4.3. Ejercicios
1. Sea: x = rcos(θ)y = rsen(θ) Hallar ∂r
∂x , ∂r∂y , ∂θ
∂x , ∂θ∂y
2. Sean:u = lnxy2
v = x2 − y2 ¿Es posible invertir de x = 1 e y = −1?
3. Sea:u = x3 + xy + y3 v = 2x+ yCalcular el valor del producto:
∂x
∂u
∂y
∂v
cuando x = 1, y = 1, u = 3, v = 3
39

4. Transformaciones Lineales
4.1. Definicion:
Son funciones definidas desde un espacio vectorial a otro espacio vectorial.
T : V →W
v ∈ Vw ∈W
T es una transformacion lineal si:
1. T (u+ v) = T (u) + T (v)
2. T (αv) = αT (v)
4.2. Matriz de la Transformacion
Es una matriz que multiplicada por el vector perteneciente al conjunto de partida, dara el vectordel conjunto de llegada. Por ejemplo: T : R3 → R2/T (x, y, z) = (x+ y, y − z)
Mt
xyz
=
(x+ yy − z
)Las columnas de la Matriz asociada son los transformados de la base canonica del conjunto de salida(En este caso R3), entonces la base canonica de R3 es:
R3 =
100
,
010
,
001
Entonces si se hace el transformado (aplicar la condicion de la transformada) de cada uno de estosvectores, nos dara como resultado:
Mt = T
100
, T
010
, T
001
T
100
=
(10
)
T
010
=
(11
)
T
001
=
(0−1
)
Mt =
(1 1 00 1 −1
)Por lo tanto:(
1 1 00 1 −1
)xyz
=
(x+ yy − z
)
40

Con esta matriz asociada, cualquier vector (x, y, z) puede ser transformado por la transformacion li-neal que tenemos.
4.3. Kernel (nucleo) de la Transformacion
Es un subespacio vectorial de conjunto de salida tal que si un vector v esta en el kernel de latransformacion, entonces la transformada de v dara como resultado el vector nulo en el conjunto desalida, en notacion serıa
v ∈ Ker(T ) =⇒ T (v) = 0w
Complementando con el ejemplo de mas arriba:
T (x, y, z) = (0, 0)
Ker(T ) = v ∈ R3/x+ y = 0 ∧ y − z = 0
Ahora bien para calcular la dimension del Kernel, tenemos que encontrar sus bases con las condicionesque nos dan:
v = (x, y, z) = (−y, y, y) = y(−1, 1, 1)
Por lo tanto, en este ejemplo dim Ker(T ) = 1, y podemos concluir que el nucleo o kernel esta generadopor el vector (−1, 1, 1).
4.4. Imagen de la Transformacion Lineal
Es un subespacio vectorial del conjunto de llegada, sabemos que los vectores transformados sondependientes de las condiciones dadas, en este caso si tenemos un vector w transformado, este se puededescomponer:
w = (x+ y, y − z) = (x, 0) + (y, y) + (0,−z) = x(1, 0) + y(1, 1) + z(0,−1)
Lo que obtenemos es un conjunto de generadores, entonces la imagen de la Transformacion estagenerada por:
Im(T ) = (1, 0); (1, 1); (0,−1)
Pero estos tres no conforman la base de la imagen, ya que no son linealmente independientes, en estecaso los vectores linealmente independiente son (1, 0)y(1, 1), por lo tanto la dimension de la imagen(cantidad de vectores linealmente independientes), en este caso, seria: dimIm(T ) = 2.Siempre se cumple que la dimension del conjunto de partida es igual a la dimension del Kernel de Tmas la dimension de la Imagen de T.
dimV = dimKer(T ) + dimIm(T )
4.5. Ejercicios
1. En R = VF : R→ Rx→ F (x)¿Cual de ellas es una Transformacion Lineal?
41

a) F (x) = x2
b) F (x) = 5x
c) F (x) = sen(x)
d) T : M2x2 → R3
(a bc d
)→ T
(a bc d
)= (a− d, 2b+ c, 4d)
2. T : R2[x]→M2(R) definida por:
T (p(x)) =
(p′′(0)
∫ 10 p(x)dx
p(−1) 0
)Hallar base de KerT y dimension.
3. Sea T : R3 → R3:
T (x, y, z) = (x− y − z, x+ y, 3z)
Hallar KerT, ImT y sus dimensiones.
42

5. Ecuaciones Diferenciales
5.1. Comparacion entre lo pasado y lo que pasaremos
Anteriormente hemos realizado ecuaciones donde tenemos una unica incognita que encontrar, ahoradaremos un paso mas adelante y nos enfrentaremos a las ecuaciones diferenciales que son ecuacionesde dos variables (funciones) (p.ej: x, y ) y sus derivadas:
y′ = 2xy + 1
En este caso se presenta la incognita y con su respectiva derivada y′, recordemos de los cursos ante-riores que la notacion y′ se puede escribir de la forma: dy
dx , con lo cual nos damos cuenta que nuestraincognita y es una variable dependiente de x, pues esta derivada respecto a ella, la variable indepen-diente en este caso es la x, ya que no existen derivadas de ella en la ecuacion.En los cursos anteriores cuando se nos presentaba una ecuacion, buscabamos una cierta raız que cum-pliera con la condicion de la ecuacion, es decir encontrabamos un numero tal que al reemplazarlo enla ecuacion nos daba como resultado una identidad. En el caso de las ecuaciones diferenciales tiene lamisma logica, pero ahora no es solo un punto, si no que es un conjunto de puntos que satisfacen estaecuacion, este conjunto de puntos es una funcion.
5.2. ¿Como saber si una funcion es solucion de la Ecuacion Diferencial?
Para saber si cierta funcion φ(x) es solucion de una ecuacion diferencial simplemente habra quereemplazarla en la ecuacion diferencial.Por ejemplo si tenemos la siguiente ecuacion diferencial:
y′′ − 2y′ + y = 0 (1)
y nos dicen que la funcion y = xex es solucion, para verificarlo debemos reemplazar en la ecuaciondiferencial, pero nos damos cuenta que tenemos la primera y segunda derivada de y en la funcion, locual no lo tenemos, para ello derivamos la funcion dada para obtener el valor de cada de las derivadasque necesitamos para luego reemplazarla:
y′ = ex + xex
y” = 2ex + xex
Reemplazando en (1) nos queda:
2ex + xex − 2(ex + xex) + xex = 0
0 = 0
Al dar como resultado una identidad, comprobamos que la funcion dada es solucion de la ecuaciondiferencial.
5.3. Orden de una ecuacion diferencial
El orden de una ecuacion diferencial viene dado por el orden de la mayor derivada existente en laella. Por ejemplo:
y′′ + y′ + 2x = 0 (2)
43

(y′)2 + 2y + x = 2 (3)
El orden de la ecuacion (2), es 2 y el orden de la ecuacion (3) es 1, (OJO: (y′)2 6= y′′ )
5.3.1. Lineal o no lineal
A una ecuacion diferencial se le llama lineal si es que sus variables y, y′, y′′, ...y(n) estan elevadasa 1 o a 0, por lo tanto, si cualquiera de estas esta elevada a 2 o mas, se le llamara no lineal. En losejemplos anteriores (2) es lineal, en cambio (3) no es lineal, ya que y′ esta elevado a 2.
5.4. Metodos de Resolucion
5.4.1. Variables Separables
Cuando tenemos ecuaciones diferenciales de primer orden donde la funcion no depende de lavariable y la ecuacion diferencial:
dy
dx= g(x)
Se resuelve separando todo lo que depende de y a un lado y todo lo que depende de x para el otrolado, para luego integrar.Por ejemplo:
dy
dx= 1 + e2x
dy = (1 + e2x)dx
y =
∫(1 + e2x)dx
y = x+1
2e2x + c
5.4.2. Resolucion de una Ecuacion Lineal de primer orden
Una ecuacion diferencial de primer orden tiene la forma:
a1(x)dy
dx+ a0(x)y = g(x)
A esta ecuacion se le dice homogenea si g(x) = 0, en el caso contrario es no homogenea.Para resolver estas ecuaciones lo recomendable es hacer lo siguiente:
1. Dividir ambos lados de la ecuacion por a1, quedando:
dy
dx+ P (x)y = f(x)
Para resolverla debemos antes definir lo que se le llama Factor Integrante (FI):
FI = e∫P (x)dx
2. Identificamos y calculamos P (x) y FI respectivamente
44

3. Luego lo multiplicaremos a ambos lados de la ecuacion, lo cual en el lado izquierdo de esta nosdara automaticamente la derivada del factor integrante y y:
d
dx
[e∫P (x)dxy
]= e
∫P (x)dxf(x)
o bien utilizar la formula:
y(x) =1
FI(x)(
∫f(x)FI(x)dx+ C)
4. Luego de esto solo basta integrar en ambos lados y nos dara la solucion de la ecuacion diferencial.
5.4.3. Ecuaciones Homogeneas:
(Sustitucion y = ux)Se les llama ecuaciones homogeneas de grado α a las EDO’s de la forma:
f(tx, ty) = tαf(x, y)
Por ejemplo: f(x, y) = x3 + y3 es una funcion homogenea de grado 3, pues:
f(tx, ty) = (tx)3 + (ty)3 = t3(x3 + y3) = t3f(x, y)
5.4.4. Ecuaciones de Bernoulli:
(Sustitucion u = y1−n)De la forma
dy
dx+ P (x)y = f(x)yn
Se realiza la sustitucion u = y1−n, reduciendola a una ecuacion lineal.
5.4.5. Ecuaciones de Ricatti
EDO’s de la forma:
y′ + P (x)y +Q(x)y2 = R(x)
Se debe saber una solucion y1 = f(x), con lo cual la solucion sera de la forma:
y = u(x) +1
y1
La cual podemos utilizar con el fin de reemplazarla en la ecuacion diferencial y asi transformarla enuna ecuacion lineal o bien se puede realizar la sustitucion y = y1 + u, para que pase a ser una EDOBernoulli.
5.4.6. Reduccion a separacion de variables
Una EDO de la forma:
dy
dx= f(Ax+By + C)
Se puede reducir a variables separables por medio de la sustitucion u = Ax+By + C con B 6= 0
45

5.4.7. Reduccion a Homogeneas
EDO’s de la forma:
y′ = f(a1x+ b1y + c1ax+ by + c
)Si las rectas se cortan en (x0, y0 se hace el cambio de variable X = x− x0, Y = y − y0.Se puede ver rapidamente si se cortan o no calculando:
a1a
=b1b⇐⇒ sonparalelas
En caso contrario, seran secantes.
Si las rectas son paralelas, se hace el cambio de variable z = ax+ by
5.4.8. Ejercicios
Resolver
1. dydx = cos2(y)t con y(0) = 0
2. dydt = sen(t)y + t2
3. dydt = et
2y − arctgt
4. dydt = −2
t y + (t− 1)
5. dydt = ytg(t) + cos(t)
6. dydx = 4y
x + x√y
7. y′ + 1xy − 3ln(x)y2 = 0 con y(1) = 5
5.5. Aplicacion de las Ecuaciones Diferenciales
5.5.1. Crecimiento Exponencial
dN
dt= kN ⇐⇒ N(t) = Cekt
N: Poblacion de individuos en un momento t
5.5.2. Ley de Enfriamiento de Newton
dT
dt= k(T − Tm)
T (t) = Cekt + Tm
46

5.6. Ecuaciones diferenciales de Orden Superior
Las ecuaciones diferenciales de Orden Superior como lo dice su nombre, son aquellas que presentanderivadas de rden dos o mas de la variable dependiente y. Son de la forma:
an(x)yN + an−1(x)yN−1 + . . . a1(x)y′ + a0y = g(x)
5.7. Problema de Valor Inicial (PVI)
La idea es resolver la ecuacion diferencial con una cierta condicion dada:
y(x0) = y0, y′(x0) = y1, y
′(x0) = y2, . . . , yN−1(xo) = yN−1
Se identifica un PVI cuando las soluciones vienen evaluadas siempre en el mismo punto, en este casox0.Para ver si la ecuacion diferencial tiene solucion o no hay que fijarse en las siguientes condiciones:
1. Todas las funciones de x ( an(x), an−1(x), . . .) deben ser continuas en todo el intervalo donde seesta evaluando el punto x0.
2. g(x) debe ser continua.
3. La funcion de x que esta multiplicando a la derivada de mayor orden sea distinta de cero.(an(x) 6= 0)
Si se cumplen estas condiciones, la ecuacion diferencial tendra solucion unica, si no se cumplen, nosera unica o bien no tendra solucion dependiendo el caso.Si se tiene una ecuacion diferencial y una solucion, para verificar que esta es la unica solucion hayque utilizar la solucion dada, derivarla cuantas veces sea necesario para poder reemplazar todos losterminos de y respecto a la solucion dada, para asi verificar si se llega a una identidad.Ahora bien como dijimos anteriormente, la solucion que tendremos de la ecuacion diferencial ya no essolo un punto, si no que es un conjunto de puntos que satisfacen la ecuacion, por lo tanto en los PVI,entonces en la solucion de la ecuacion puede venir dada de la forma:
y = Cf(x)
Y aquı dependiendo de las condiciones dependera si C tomara un unico valor (unica solucion) o bieninfinitos valores (Infinitas soluciones).
5.8. ¿Como solucionar ecuaciones lineales de orden superior?
Una ecuacion linea de orden superior se puede separar en dos, si tenemos que es de la forma:
an(x)yN + an−1(x)yN−1 + . . . a1(x)y′ + a0y = g(x)
Tendremos primero la ecuacion diferencial homogenea, que equivale a que en la ecuacion g(x) = 0 yademas tendremos la ecuacion no homogenea que es en el caso contrario (g(x) 6= 0).La solucion general de la ecuacion viene dada por la solucion homogenea yh y la solucion particularyp:
y = yh + yp
47

5.9. Ecuacion homogenea
1. Siembre tendra como solucion la solucion trivial (y = 0) (pero no interesa)
2. El numero de soluciones sera el orden de la mayor derivada p.ej : y′′+y′+y = 0 tiene 2 soluciones,que las denotaremos por y1, y2.Entonces la solucion homogenea yh la podemos denotar como una combinacion lineal de estasdos soluciones:
yh = c1y1 + c2y2
Siempre y cuando y1, y2 sean Linealmente independientes.Esto se puede verificar facilmente a traves del Wronskiano
5.10. El Wronskiano
W [f1, f2, . . . , fn] =
∣∣∣∣∣∣∣∣∣f1 f2 f3f ′1 f ′2 f ′3...
......
fn−11 fn−12 fn− 13
∣∣∣∣∣∣∣∣∣Entonces si:W [f1, f2, . . . , fn] 6= 0 son Linealmente Independientes.En caso contrario, si W [f1, f2, . . . , fn] = 0 las funciones son Linealmente Dependientes.
5.11. Metodo de reduccion de orden
Ahora bien conociendo ya una solucion y1 de la ecuacion diferencial, calcularemos la segundasolucion y2, si tenemos la ecuacion:
a2(x)y′′ + a1(x)y′ + ao(x)y = 0/1
a2⇐⇒ y′′ + p(x)y′ + q(x)y = 0
y1 con y2 si son linealmente independientes conformaran el conjunto solucion de la ecuaciondiferencial, por lo tanto obtendremos la segunda solucion y2 con la Formula de Abel:
y2(x) = y1(x)[ ∫ e−
∫p(x)dx
y21
]dx
Ahora ya tenemos la solucion homogenea:
yh = C1y1 + C2y2
5.12. Ecuaciones de 2o Orden con coeficientes constantes
Si tenemos una ecuacion de la forma:
y′′ + by′ + cy = 0
48

Con b y c constantes reales, la ecuacion se soluciona utilizando primeramente la sustituciony = eλx, con lo cual la ecuacion queda de la siguiente forma:
λ2eλx + beλx + ceλx = 0
eλx{λ2 + λb+ c} = 0
y como eλx 6= 0, entonces λ2 + λb + c = 0, donde λ2 + λb + c es el polinomio caracteristicop(λ).Donde λ:
λ =−b±
√b2 − 4c
2
Esto se separa en tres casos, dependiendo del valor del discriminante ∆:
Caso 1: b2 − 4c > 0Calculamos sus raices:
λ1 =−b+
√b2 − 4c
2
λ2 =−b−
√b2 − 4c
2
La solucion viene dada por:
y(x) = k1eλ1x + k2e
λ2x
Caso 2: b2 − 4c = 0En este caso el polinomio caracteristico posee solo una raiz real (multiplicidad 2) La solucionviene dada por:
y(x) = k1e−b2x + k2xe
−b2x
Caso 3: b2 − 4c < 0En este caso donde eld eterminante es negativo, tenemos raices complejas conjugadas:
λ = −b±√
∆i
2
Hay que tener en cuenta la formula de Euler:
e±θi = cos(θ)± isen(θ)
La solucion viene dada por:
y = e−b2 {k1cos(
√∆
2x) + k2sen(
√∆
2x)}
Hasta ahora se ha considerado exclusivamente el caso de una Edo homogenea g(x) = 0, ahorabien hay que ver que hacer cuando g(x) 6= 0.Recordemos que la solucion general de una ecuacion diferencial no homogenea viene dada por:
y = yp + yh
Ya sabemos como calcuar yh, ahora veremos dos maneras de calcular la solucion particular:
49

5.12.1. Variacion de Parametros:
La cual dice que la solucion particular de la ecuacion viene dada por las soluciones homogeneasy1 e y2 multiplicadas por ciertas funciones C1 y C2 respectivamente, entonces tendremos que: Sitenemos
y′′ + p(x)y′ + q(x)y = g(x)
Entonces:
yp(x) = C1(x)y1 + C2(x)y2
Donde se rigen por lo siguiente:
C ′1(x)y1 + C ′2(x)y2 = 0
C ′1(x)y′1 + C ′2(x)y′2 = g(x)
Siendo W (x) el Wronskiano:
W (x) =
∣∣∣∣y1 y2y′1 y′2
∣∣∣∣ = y1y′2 − y′1y2
Mediante Cramer obtenemos:
C ′1 =
∣∣∣∣ 0 y2g(x) y′2
∣∣∣∣W (x)
⇐⇒ C1(x) =
∫−g(x)y2
y1y′2 − y′1y2
C ′2 =
∣∣∣∣y1 0y′1 g(x)
∣∣∣∣W (x)
⇐⇒ C2(x) =
∫y1g(x)
y1y′2 − y′1y2
Con lo que finalmente tendremos la solucion general de la ecuacion diferencial:
y = C1(x)y1 + C2(x)y2 + C1(x)y1 + C2(x)y2
5.12.2. Anuladores (Aniquiladores)
Toda ecuacion diferencial con coeficientes constantes, de la forma :
ay′′′ + by′′ + cy′ + dy = g(x)
Con a, b, c, d ∈ RSe puede escribir de la forma:
(aD3 + bD2 + cD + 1)y = g(x)
Lo encerrado en el parentesis se le llama operador diferencial, en el cual se realiza una facto-rizacion para expresar la ecuacion diferencial de la forma que la necesitamos para utilizar estemetodo.¿Que significa anulador?Significa el orden de la derivada en que la funcion se hace cero (se anula). Por ejemplo:
D(x2) = 2x
D2(x2) = 2
D3(x2) = 0
50

Por lo tanto la funcion x2 se anula con D3.
Entonces la idea es que si tenemos una ecuacion de la forma:
(aD3 + bD2 + cD + 1)y = g(x)
f(x)y = g(x)
La idea es multiplicar en ambos lados de la ecuacion diferencial por un factor L que anule lafuncion g(x), lo que hara que quede como una ecuacion homogenea ( Lf(x) = 0 ). Por lo tantosi se resuelve esto se encontrara automaticamente la solucion general ( yheyp a la vez).
5.12.3. Tecnicas para obtener el Anulador:
a) Los polinomios de la forma xn−1 + ...+ x2 + x+ 1 son anulados por Dn, siendo n el mayorgrado del polinomio.
b) Las funciones exponenciales tales como eαx, xeαx, ...xn−1eαx son anuladas por (D − α)n
c) Las funciones de la forma:
eαxcos(βx)
eαxxn−1cos(βx)
eαxsen(βx)
eαxxn−1sen(βx)
Son anuladas por [D2 − 2αD + (α2 + β2)]n
Por lo tanto cuando se presenta una ecuacion de este estilo, en resumen:
a) Se calcula la solucion homogenea yh igualando la ecuacion a cero (g(x) = 0), obteniendo elpolinomio caracteristico, ver si el determinante es mayor, menor o igual a cero para ver laforma de las soluciones.
b) Se resuelve la ecuacion a traves de Anuladores de donde obtendremos la solucion generalde la ecuacion diferencal.
c) A la solucion general le restamos la solucion homogenea yh obtenida en (a) para obtener lasolucion particular yp.
d) Ahora bien se necesitan obtener las constantes de la solucion particular yp, para esto hayque ver la forma de la solucion particular, ya sea un polinomio, exponencial, etc. Luego sesustituye yp en la ecuacion diferencial con lo que obtendran los valores de las constanes.
Por ejemplo:
y′′ + 3y′ + 2y = x2
Primero calculamos la solucion homogenea, a traves del polinomio caracteristico:
(λ2 + 3λ+ 2)y = 0
(λ+ 2)(λ+ 1) = 0
51

Las raices son λ1 = −1 e λ2 = −2. Por lo tanto:
yh = C1e−x + C2e
−2x
Ahora calculamos la solucion general a traves de el metodo de los anuladores, como repasamosanteriormente sabemos que a nuestra funcion g(x) = x2 la anula D3 por lo tanto multiplicamosen ambos lados por D3:
D3(D2 + 3D + 2) = D3x2 ⇐⇒ D3(D + 1)(D + 2) = 0
Por lo tanto este polinomio de grado 5 tiene raices λ1 = 0, λ2 = 0, λ3 = 0, λ4 = −1, λ5 = −2.Entonces la solucion general viene dada por:
y = C1 + C2x+ C3x2 + C4e
−2x + C5e−x
y si le restamos a la solucion general la homogenea yp nos queda que:
yp = C1 + C2x+ C3x2
Pero necesitamos encontrar los valores de C1, C2, C3, para ello sabemos la forma de la solucionparticular yp = A+Bx+Cx2, entonces de esta forma la reemplazamos en la ecuacion diferencial(calculando previamente sus derivadas).
yp = A+Bx+ Cx2 ⇐⇒ y′p = B + 2Cx ⇐⇒ y′′p = 2C
Por lo tanto al reemplzarla:
2C + 3(B + 2Cx) + 2(A+Bx+ Cx2) = x2
Desarrollando y agrupando:
2Cx2 + (6C + 2B)x+ (2C + 3B + 2A) = x2
La unica manera que sea una igualdad sera que:
2C = 1 ⇐⇒ C =1
2
6C + 2B = 0 ⇐⇒ B =−3
2
2C + 3B + 2A = 0 ⇐⇒ = A7
4
Por lo tanto la solucion particular viene dada por:
yp =7
4− 3
2x+
1
2x2
Finalmente la solucion general viene dada por:
y = C1e−x + C2e
−2x +7
4− 3
2x+
1
2x2
52

5.12.4. Ecuaciones exactas
De la forma: M(x, y)dx+N(x, y)dy = 0Se dice exacta si existe funcion u(x, y) tal que:
∂u
∂x= M(x, y)
∂u
∂y= N(x, y)
Se debe cumplir que:
∂u
∂y=∂N
∂x
Con ello encontramos la curva solucion de la EDO, u(x, y) = c
5.12.5. Ejercicios
1. y′′ − 2y′ + y = 0 con y(0) = 3 y′(0) = −1)
2. y′′ + 5y′ + 6y = 0 con y(0) = −3 y′(0) = 1
3. y′′ + 6y′ + 9y = 0
4. y′′ + 3y′ + 2y = 4x2
5. y′′ + y = tg(x)
6. y′′ − 6y′ + 9y = 6x2 + 2− 12e3x
7. x3y′′′ + x2y′′ − 6xy′ + 6y = 30x
8. (1 + 2x)y′′ + 4xy′ − 4y = 1 + 4x+ 4x2
9. (3x2 + 6xy2)dx+ (6x2y + 4y3)dy
10. y(1 + xy)dx− xdy = 0
11. x2y′′ − 3xy′ + 13y = x2sec(3ln(x))
53

6. Transformada de Laplace
L{f(t)} =
∫ ∞0
e−stf(t)dt = limp→∞
∫ p
0e−stf(t)dt
Podemos separarla:
L{αf(t) + βg(t)}dt = αL{f(t)}dt+ βL{f(t)}dt
6.1. Razones trigonometricas utiles:
cos(2x) = cos2(x)− sen2(x)
sen(2x) = 2sen(x)cos(x)
cos2(x) = cos(2x)+12
sen2(x) = cos(2x)−12
6.2. Completacion de cuadrados:
Cuando se tiene un polinomio de grado dos el cual no es posible factorizarlo (∆ < 0), se utiliza losiguiente:
Si se tiene el polinomio ax2 + bx + c, lo que se hace es obtener un nuevo numero dado por(b2
)2,
el cual se suma y se resta en el polinomio, quedando ax2 + bx+ c+ b2
4 −b2
4 , donde con ax2 + bx+ b2
4
se forma un trinomio cuadrado perfecto quedando (ax+ b2)2 + c− b2
4
6.3. Funciones Hiperbolicas:
cosh2(x)− senh2(x) = 1
senh(tx) = etx−e−tx
2
cosh(tx) = etx+e−tx
2
tanh(tx) = senh(x)cosh(x)
6.4. Tabla para calcular Transformadas de Laplace elementales:
1. L{k} = ks
2. L{eat} = 1s−a
3. L{tn} = n!sn+1
4. L{sen(kt)} = ks2+k2
5. L{cos(kt)} = ss2+k2
6. L{senh(kt)} = ks2−k2
54

7. L{cosh(kt)} = ss2−k2
8. L{ln(t)} = − ln(s)+γs
9. L{H} = 1s
10. L{Ha} = e−as
s
11. L{δ} = 1
12. L{δa} = e−as
6.5. Transformada de Laplace para una funcion por tramos:
Se realiza mediante la definicion L{f(t)} =∫∞0 e−stf(t)dt, pero separando por propiedades de las
integrales en los tramos dados.
6.6. Primer Teorema de Traslacion:
L{eatf(t)} = F (s− a)
o bien: (sustituyendo s por s-a)
L{eatf(t)} = L{f(t)}s→s−a
6.7. Transformada inversa de Laplace:
6.7.1. Propiedades:
L−1{αF (s)} = αL−1{F (s)}
L−1{F (s) +G(s)} = L−1{F (s)}+ L−1{G(s)}
De manera general: L−1{F (s)} = f(t)
L−1{ks} = k
L−1{ n!sn+1 } = tn
L−1{ 1s−a} = eat
L−1{ ks2+k2
} = sen(kt)
6.8. Funcion Heaviside:
H(t− a) =
{0 t < a1 t ≥ a
Cuando la funcion Heaviside H tiene un salto a, se denota como Ha.
55

6.9. Funcion Heaviside multiplicada por una funcion:
f(t)H(t− a) =
{0 t < af(t) t ≥ a
Si se tiene una funcion:
g(t) =
{25t t < 100 t ≥ 10
Lo que se hace es transformarla dejandola siempre con el cero arriba.
g(t) = 25t+
{0 t < 10−25 t ≥ 10
Finalmente queda:
g(t) = 25t− 25tH(t− 10)
Transformada de Laplace de H:
L{H(t)} =1
s
Transformada de Laplace de Ha:
L{Ha(t)} =e−as
s
Tambien se puede tener lo siguiente:
f(t) = Ha(t)−Hb(t)
f(t) =
0 t < a1 a ≤ t < b0 t > b
es decir:
f(t) =
{1 a ≤ t < b0
6.10. Segundo Teorema de Traslacion:
L{Hafa} = e−atL{f(t)}
56

6.11. En resumen, Teoremas Importantes:
L{eatf(t)}(s) = L{f(t)}(s−a) = F (s− a)
L{F ′(t)}(s) = sL{F (t)} − F (0)
L{tnf(t)} = (−1)n dn
dsnF (s)
L{∫ t0 f(u)du} = 1
sL{f(t)}
L{Hafa}(s) = e−asL{f(t)}(s) = e−asF (s)
6.12. Transformada de Laplace en ecuaciones diferenciales:
Lo que hace la transformada de Laplace a una ecuacion diferencial es transformarla en una ecuacionalgebraica, para resolverla hay que seguir los siguientes pasos:
Aplicar la transformada de Laplace en ambos lados de la ecuacion y utilizar sus respectivaspropeidades y linealidad para ordenarla.
Luego se usa la siguiente propiedad: L{f (n)(t)} = snL{f(t)} − sn−1f(o) − sn−2f ′(o) − ... −sf (n−2)(0)− f (n−1)(0)
Se define Y (s) = L{y}
Se despeja Y
Luego para obtener la funcion y(t) se le realiza la transformada de Laplace inversa a Y , esdecir L−1Y (Muchas veces se tendra que realizar fracciones parciales para calcular de forma massimple la Transformada de Laplace.)
6.13. Convolucion:
Definicion: Se define el producto de convolucion de f con g como:
(f ∗ g)(t) =
∫ t
0f(t− u)g(u)du
Teorema:
L{(f ∗ g)(t)} = L{f(t)} · L{g(t)}
Ejemplo:
L−1{ 1
s2· 2
s3} = L−1{ 1
s2} ∗ L−1{ 2
s3}
. . . = t ∗ t2
L−1{ 1
s2· 2
s3} =
t4
12
57

6.14. Ejercicios
Resolver:
1. L{|sen(t)|}
2. L{ 1(s2+c2)2
}
3. L{ 1(s2+2s+5)2
}
4. L{∫ t0x2cos(x)+e−xsen(x)
x dx}
5. x′′(t)− y′′(t) = et
x′(t)− y′(t) = t con x(0) = 0, x′(0) = 1, y(0) = −1, y′(0) = −1
6. tx′′ + (4t− 2)x′ + (13t− 4)x = 0 con x′(0) = a, x(0 = 0)
7. x′′ + 4x = 8δ2π(t) con x(0) = 3 y x′(0) = 0
8. int∞0cos(x)x2+b2
dx
9. ty′′ + (t− 1)y′ − y = 0 con y(0) = 5
10. y(t) =∫ t0 e−xy′(x)dx+
∫ t+50 y(t+ 1− x)δ(x− 1)dx+ f ′(t) con y(1) = 1 y
f(t) =
{2(t− 1) 0 ≤ t < 5t t > 5
58

7. Producto Interno de Funciones
Se define como:
< f, g >=
∫ a
bf(t)g(t)dt
donde f y g estan definidas en [a, b] ∈ R.Se dice que f y g son ortogonales si:
< f, g >= 0
7.1. Propiedades
1. < f, g >=< g, f >
2. < αf, g >= α < f, g >
3. < f, f >= 0→ f = 0
4. < f, f >= ||f ||2
5. < f + g, h >=< f, h > + < g, h >
7.2. Ejercicios
1. Demostrar que x2 y x3 son funciones ortogonales en [−1, 1]
7.3. Conjunto Ortogonal
Tenemos el conjunto
φ0(x), φ1(x), φ2(x), . . . , φn(x)
Se dice ortogonal en [a, b] si el producto interno entre cada uno de ellos es igual a cero, es decir:
< φi(x), φj(x) >= 0
con i 6= j.
Se dice ortonormal si la norma de cada uno es igual a 1, es decir:Si tenemos que ||~u|| =< u, u >, entonces:
||φn(x)||2 =< φn(x), φn(x) >=
∫ a
bφ2n(x)dx
Por lo tanto si ||φi(x)|| = 1 para todo i, se dice ortonormal.
7.4. Ejercicios
1. ¿Es ortogonal {1, cos(x), cos(2x), cos(3x), . . . } en [−π, π]?
8. Series de Fourier
8.1. Objetivo
El objetivo de las Series de Fourier es extender de manera periodica una funcion para que seadiferenciable en todo su dominio y poder resolver problemas con este tipo de funciones (Ecuacionesdiferenciales, Ecuaciones diferenciales parciales).
59

8.2. Identidades y Calculos Importantes para agilizar
1. sen2(x) = 1−cos(2x)2
2. cos2(x) = 1+cos(2x)2
3. sen(A)sen(B) = 12 [sen(A+B) + sen(A−B)]
4. cos(A)sen(B) = 12 [sen(A+B)− sen(A−B)]
5. cos(A)cos(B) = 12 [cos(A+B) + cos(A−B)]
6. sen(A)sen(B) = −12 [cos(A+B)− cos(A−B)]
7.∫xcos(nx) = nxsen(nx)+cos(nx)
n2
8.∫xsen(nx) = sen(nx)−nxcos(nx)
n2
9.∫x2cos(nx) = (n2x2−2)(sen(nx)+2nxcos(nx))
n3
10.∫x2cos(nx) = (2−n2x2)(cos(nx)+2nxsen(nx))
n3
11.∫e−xcos(nx)dx = e−x(nsen(nx)−cos(nx))
n2+1
12.∫excos(nx)dx = ex(nsen(nx)+cos(nx))
n2+1
13.∫exsen(nx)dx = ex(sen(nx)−ncos(nx))
n2+1
14.∫exsen(nx)dx = −ex(sen(nx)+ncos(nx))
n2+1
8.3. Procedimiento
Considerando una funcion continua a trazos definida en un cierto intervalo la funcion es aproximadapor Series de Fourier de donde solo necesitamos obtener los respectivos coeficientes a0, an, bn, los cualesse obtienen de la siguiente manera:
1. Si esta definida en [−π, π]:
f(x) =a02
+∞∑1
ancos(nx) + bnsen(nx)
a0 =1
π
∫ π
−πf(x)dx
an =1
π
∫ π
−πf(x)cos(nx)dx
bn =1
π
∫ π
−πf(x)sen(nx)dx
2. Si esta definida en [−L,L]:
f(x) =a02
+∞∑1
ancos(nπx
L) + bnsen(
nπx
L)dx
60

a0 =1
L
∫ L
−Lf(x)dx
an =1
L
∫ L
−Lf(x)cos(
nπx
L)dx
bn =1
L
∫ L
−Lf(x)sen(
nπx
L)dx
3. Si esta definida en [a, b]:
f(x) =a02
+∞∑1
ancos(2nπx
b− a) + bnsen(
2nπx
b− a)dx
a0 =1
b− a
∫ b
af(x)dx
an =1
b− a
∫ b
af(x)cos(
2nπx
b− a)dx
bn =1
b− a
∫ b
af(x)sen(
2nπx
b− a)dx
Lo importante es aprender de donde vienen los calculos que normalmente hacemos de manera mecanicaaprendiendonos una formula (como en los casos de los coeficientes), puesto que si nos cambian elconjunto ortogonal aquellas formulas pueden no funcionar.Por lo mismo si tenemos una funcion f(x), su Serie de Fourier viene dada por:
f(x) = a0g0 +∞∑1
angn + bnfn
Donde φ = {gn, fn} es el conjunto ortonomal.De esta forma los coeficientes estan definidas como:
a0 =〈f(x), g0〉〈g0, g0〉
an =〈f(x), gn〉〈gn, gn〉
bn =〈f(x), fn〉〈fn, fn〉
8.4. Paridad de Funciones
La paridad de la funcion que estamos buscando aproximar nos ayudara en facilitar el calculo de laserie de Fourier ya que si:
Si f(x) es impar → a0 = 0 ∧ an = 0
Si f(x) es par → bn = 0
61

8.4.1. Ejercicios
1. Hallar la serie de Fourier de:
f(n) =
−1 −π < x < 01 0 < x < π0 x = −π, x = π
8.5. Extensiones par e impar
Sabemos que existen funciones pares (x2, |x|, cos(x), x2n, etc) como tambien impares (x, x3, x2n+1, sen(x), tg(x), etc),pero Fourier puede extender periodicamente una funcion par a impar y viceversa.Por ejemplo tenemos:
f(x) = x2
definida en [0, π], graficandolo nos da una media parabola puesto que estamos definiendola en [0, π].
Ahora bien si la queremos extender de manera impar, quedara simetrico el primer cuadrante con eltercer cuadrante y luego esto se repetira periodicamente con un periodo de 2π, de la misma formapodemos extender de manera par una funcion impar.Recuerdo
par · par = par
impar · impar = par
par · impar = impar
Con ello tambien nos ahorraremos calculo puesto que si la funcion f(x) es extension par (Tambienllamada Serie Cosenoidal), bn = 0 puesto que f(x) es par y sen(nπxL ) es impar, por lo tanto parpor impar es igual a impar y por lo tanto bn = 0 y si es extension impar (Tambien llamada SerieSenoidal) a0 = 0 ∧ an = 0 por el mismo razonamiento.
62

8.5.1. Ejercicios
1. Desarrollar la serie senoidal y cosenoidal de f(x) = x, 0 < x < L
2. Desarrollar la serie normal, senoidal y cosenoidal de f(x) = x2
3. Hallar la serie cosenoidal f(x) = sen(x)
4. Hallar la serie senoidal de f(x) = cos(2x)
5. Hallar serie extendida par e impar de f(x) = ex definida en (0, π)
6. ¿Cual es la serie de Fourier de sen2(x)?
7. ¿Cual es la serie de Fourier de sen3(x) con periodo 2π?
8. Hallar el periodo y la serie de Fourier de f(x) = max{cos(x), cos(2x)}
9. Desarrollar la funcion f(x) = x− 1, 1 < x < 2 en serie de Fourier.
8.6. Teorema de la convergencia en Series de Fourier
Suponiendo que f es una funcion periodica y suave por partes (diferenciable por partes), entoncessu Serie de Fourier converge:
Al valor de f(x) en todo punto donde f(x) es continua
Al valor promedio 12(f(x+) + f(x−)) en cada punto donde f es discontinua, donde f(x+) es el
lımite derecho y f(x−) el lımite izquierdo en x.
8.6.1. Ejercicios
1. Sea f(x) = x2, 0 < x < 2, obtener f(2)
2. Demostrar
∞∑1
1
n2= 1 +
1
22+
1
32+
1
42+ · · ·+ 1
n2=π2
6
3. Demostrar
∞∑1
(−1)n+1
n2=π2
12
4. Demostrar
∞∑1
1
n2=π2
8(nimpar)
5. Hallar la serie de Fourier de f(x) = |x| en [−π, π] para encontrar 1 + 132
+ 152
+ · · · = π2
8
63

8.7. Derivacion e Integracion de Series de Fourier
La idea de realizar derivadas o Integrales es facilitar el calculo de sus Serie de Fourier en ciertasfunciones que puede ser complejo utilizando la propia funcion y aplicandole derivada o antiderivadapodremos llegar de manera mas simple al resultado.Por lo tanto si tenemos:
f(x) =a02
+
∞∑1
[ancos(nπx
L) + bnsen(
nπx
L)]
Entonces la Integral de la Serie de Fourier sera:∫ x
0f(u)du =
a0x
2+∞∑1
L
nπ[ansen(
nπx
L)− bncos(
nπx
L)]
y la derivada de la Serie de Fourier sera (si f es suave):
f ′(x) = +∞∑1
L
nπ[bncos(
nπx
L)− ansen(
nπx
L)]
8.8. Identidad de Parseval
En general:
||f(x)|| = a20||g0||+∞∑1
a2n||gn||+ b2n||fn||
Es decir:
〈f(x), f(x)〉 = a20〈g0, g0〉+∞∑1
a2n〈gn, gn〉+ b2n〈fn, fn〉
Si f(x) es continua a tramos en [−1, 1] y diferenciable a traves de (−L,L), entonces:
1
L
∫ L
−Lf2(x)dx =
a202
+∞∑1
a2n + b2n
8.8.1. Ejercicios
1. Encontrar la Serie de Fourier de f(x) = x, 0 < x < 2 en serie cosenoidal y demostrar:
1
14+
1
24+
1
34+ · · ·+ 1
n4=π4
90
8.9. Integrales de Fourier
Representa a clases de funciones no periodicas definidas en (−∞,∞) o (0,∞) con:∫ ∞−∞|f(x)|dx <∞
Sirve para generar la transformada de Fourier, la cual sirve para solucionar problemas de ecuacionesdiferenciales parciales, como tambien para encontrar el valor de algunas integrales impropias.La integral de Fourier esta definida en (−∞,∞) de la siguiente manera:
f(x) =1
π
∫ ∞0
[A(α)cos(αx) +B(α)sen(αx)]dα
64

donde:
A(α) =
∫ ∞−∞
f(t)cos(αt)dt
B(α) =
∫ ∞−∞
f(t)sen(αt)dt
8.9.1. Convergencia de la integral de Fourier
Para que la integral de Fourier sea convergente a f(x) se requiere f) y f ′ continua a tramos yademas f absolutamente integrable en (−∞,∞).En los puntos de discontinuidad la integral de Fourier converge a:
f(x+0 ) + f(x−0 )
2
8.9.2. Integrales de Fourier de Cosenos y Senos
Si f es par, entonces B(α) = 0, por lo tanto:
f(x) =2
π
∫ ∞0
(
∫ ∞−∞
f(t)cos(αt)dt)cos(αx)dα
Si f es impar, entonces A(α) = 0, por lo tanto:
f(x) =2
π
∫ ∞0
(
∫ ∞−∞
f(t)sen(αt)dt)sen(αx)dα
8.9.3. Ejercicios
1. Encontrar la representacion en integral de Fourier de la funcion:
f(x) =
0 x < 01 0 < x < 20 x > 2
2.
f(x) =
{2 |x| < p0 |x| > p
3. Hallar e−x con x > 0 en forma integral de Fourier de senos.
4. Probar que si a es una constante, pero no un numero entero entonces:
cos(ax) =2asen(πa)
π[
1
2a2+
∞∑1
(−1)ncos(nx)
a2 − n2]
y de lo anterior probar que:
cot(aπ) =2a
π=
2a
π(
1
a2+∞∑1
1
a−n2)
65

9. Transformada de Fourier
9.1. Aplicaciones
Las principales aplicaciones son:
Resolver ecuaciones diferenciales ordinarias y parciales
Calculo de integrales impropias
Obtencion de transformadas y transformadas inversas mediante propiedades y teoremas
9.2. Definicion
Sea f una funcion absolutamente integrable, es decir:∫ ∞−∞|f(t)|dt <∞
Entonces por definicion la Transformada de Fourier de f sera:
F [f ](ω) = f(ω) =
∫ ∞−∞
e−iwxdx =
∫ ∞−∞
cos(ωt)f(t)dt− i∫ ∞−∞
sen(ωt)f(t)dt
La Transformada Inversa:
F−1[F (ω)](x) =1
2π
∫ ∞−∞
F (ω)eiwxdw = f(t) =
∫ ∞−∞
cos(ωx)f(x)dx+ i
∫ ∞−∞
sen(ωx)f(x)dx
9.3. Linealidad
Con α y β constantes:
F [αf + βg](ω) = αF [f ](ω) + βF [g](ω)
F−1[αf + βg](ω) = αF−1[f ](ω) + βF−1[g](ω)
9.4. Teoremas Importantes
9.4.1. Escalamiento
F [f(at)](ω) =1
|a|F [f(x)](ω
a)
F [f(−t)](ω) = F (−ω)
9.4.2. Simetrıa
Si F [f(t)] = F (ω)→ F [F (t)] = 2πf(−ω)
9.4.3. Desplazamiento en t
Si F [f(t)] = F (ω)→ F [F (t− t0)](ω) = F (ω)e−iwt0
9.4.4. Desplazamiento en w
Si F [f(t)] = F (ω)→ F [F (t)eiω0t](ω) = F (ω − ω0)
66

9.4.5. Diferenciacion en t
Si F [f(t)] = F (ω)→
1. F [f ′(t)] = (iω)F (ω) si lımt→±∞ f(t) = 0
2. F [f (n)(t)] = (iω)nF (ω) si lımt→±∞ f(t) = 0
9.4.6. Integracion en t
Si F [f(t)] = F (ω)→
1. F [∫ t−∞ f(t)] = 1
iωF (ω) si
2. F [∫ t−∞ f(t)] = 1
iωF (ω) + πF (0)δ(ω) si F (0) 6= 0
9.4.7. Diferenciacion en w
Si F [f(t)] = F (ω)→
1. F [−itf(t)] = dFdω
2. F [(−it)nf(t)] = dnFdω
9.4.8. Integracion en w
Si F [f(t)] = F (ω)→ F [− 1(it)f(t)] =
∫∞ω F (ω)dω
1. lim|ω|→∞F (ω) = 0
9.5. Producto Convolucion
9.5.1. Definicion
f(t) ∗ g(t) =
∫ ∞−∞
f(u)g(t− u)du =
∫ ∞−∞
f(t− u)g(u)du
9.5.2. Propiedades de la Convolucion
1. F [f(t) ∗ g(t)]ω = F [f(t)] ·F [g(t)] = F (ω) ·G(ω)
2. F−1[F (ω) ·G(ω)](t) = F−1[F (ω)](t) ∗F−1[G(ω)](t) = f(t) ∗ g(t)
Las Transformadas de Fourier se usan para resolver Ecuaciones diferenciales parciales, donde nor-malmente se siguen pasos bastante similares:
1. Aplicar Transformada de Fourier
2. Separar lo que esta respecto a la variable independiente y la dependiente.
3. Quedara una variables separables, por lo tanto integramos.
4. Obtendremos el valor el valor de la transformada de la solucion, PERO tiene una funcion cons-tante que necesitamos calcular, para ello utilizamos las condiciones de valor inicial que nos dan.
5. Aplicamos Transformada de Fourier a la condicion inicial, con ello obtendremos el valor de lafuncion constante.
6. Luego de esto tendremos la Transformada de la solucion a la ecuacion, entonces tenemos queaplicar Transformada Inversa, donde generalmente se utiliza la definicion.
67

9.5.3. Ejemplo
1. Encontrar la temperatura u(x, t) de una varilla infinita considerando la ecuacion de calor:
k∂2u
∂x2=∂u
∂t(4)
con −∞ < x <∞, sujeto a la condicion:
f(x) =
{C0 |x| < 10 |x| > 1
Como el dominio de x es −∞ < x < ∞, utilizamos Transformada de Fourier Normal, teniendoque:
F{u(x, t)} = u(w, t)
Aplicando Transformada de Fourier a la ecuacion (1):
F{k∂2u
∂x2} = −kw2u(w, t)
Y tambien:
F{∂u∂t} =
du
dt
Entonces nos quedarıa:
−kw2u(w, t) =du
dt
Nos damos cuenta que es una ecuacion diferencial de variables separables, por lo tanto:
−kw2dt =du
u(w, t)
Integramos:
−kw2t+ c = ln(u(w, t))
Aplicamos e:
Ce−kw2t = u(w, t)
Ahora debemos encontrar C con las condiciones iniciales dadas:
F{u(x, 0)} =
∫ ∞−∞
f(x)e−iwxdx =
∫ 1
−1C0e
−iwx
Integrando nos queda:
F{u(x, 0)} =C0
iw(eiw − e−iw)
68

Por euler tenemos que:
eiw = cosw + isenw
e−iw = cosw − isenw
Por lo tanto reemplazando nos queda:
F{u(x, 0)} =2C0sen(w)
w
Entonces u(w, t) nos queda:
u(w, t) =2C0sen(w)
we−kw
2t
Como necesitamos u(x, t) que es la temperatura de la varilla, le aplicamos transformada inversa:
F−1{u(w, t)} =1
2π
∫ ∞−∞
2C0sen(w)
we−kw
2teiwxdw
F−1{u(w, t)} =C0
π
∫ ∞−∞
sen(wx)
we−kw
2teiwxdw
Y sabemos que por la ecuacion de euler:
eiwx = coswx+ isenwx
Entonces reemplazando en la ecuacion:
F−1{u(w, t)} =C0
π
∫ ∞−∞
sen(w)
we−kw
2t{coswx+ isen(wx)}dw
Pero :∫ ∞infty
sen(wx)
we−kw
2tisen(wx)dw
Se anula ya que es impar en (−∞,∞), por lo tanto:
u(x, t) =C0
π
∫ ∞−∞
sen(w)
we−kw
2tcoswxdw
2. Resolver:
{ut + etux + 2u = 0u(x, 0) = f(x)
Reescribiendo la ecuacion tenemos que:
ut + etd
dx(u) + 2u = 0
Entonces, por la propiedad de derivada:
F{f ′(t)} = iwF (w)
69

Aplicando entonces Transformada de Fourier a la ecuacion:
ut + iwetu+ 2u = 0
Ahora debemos despejar ut:
ut = −iwetu− 2u
Factorizando:
ut = −(2 + iwet)u
Sabemos que ut = dudt :
du
dt= −(2 + iwet)u
Nos queda una ecuacion separable:
du
u= −(2 + iwet)dt
Integramos:
ln(u) = −(2t+ iwet) + c
Ahora para despejar u aplicamos e
u = e−(2t+iwet)+c
Por propiedades de potencia:
u = e−2te−iwetec
Sabemos que ec es una constante, por lo tanto la anotamos como un valor K, nos queda:
u = Ke−2te−iwet
Ademas por la condicion inicial, tenemos que u(x, 0) = f(x), por lo tanto aplicando Transfor-mada de Fourier queda :
u(w, 0) = f(w) = Ke−iw
Reemplazando en la ecuacion:
u = e−2tf(w)e−iw(1−et)
Y por el teorema de traslacion:
F{f(w)e−iwa} = f(x− a)
Por lo tanto la solucion es:
u(x, t) = e−2tf(x− (1− et))
9.6. Ejercicios
1. Sea a > 0, hallar f(ω) para la funcion caracterıstica:
f(x) = X[−a,a] =
{1 x ∈ [−a, a]0 x /∈ [−a, a]
2. Hallar f(ω) para f(x) = e−a|x|
3. Hallar la Transformada de Fourier de
f(t) =
{1 |t| ≤ 10 |t| > 1
70