第三章机器人运动学和动力学 -...
TRANSCRIPT
第三章 机器人运动学和动力学
3.1 机械手运动的表示方法
3.2 手爪位置和关节变量的关系
3.3 雅可比矩阵
3.4 手爪力和关节驱动力的关系
3.5 机械手运动方程式的求解
2019/3/8 1
2019/3/8 2
第三章 机器人运动学和动力学
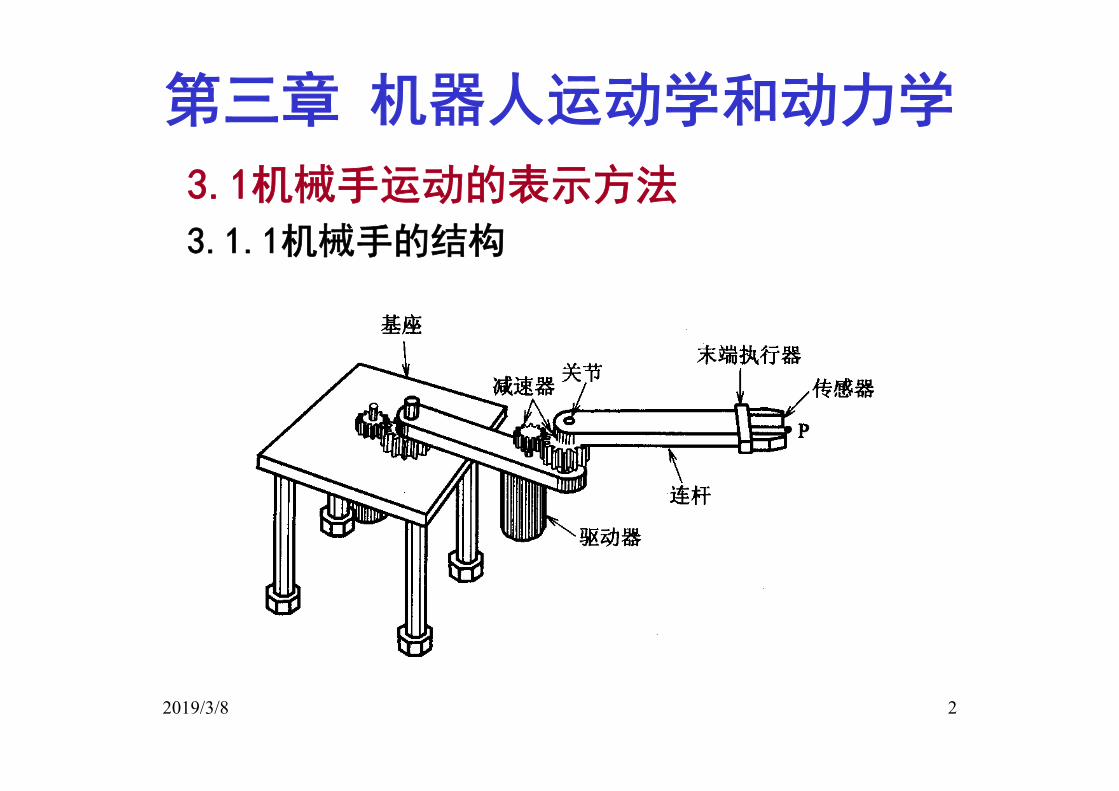
3.1机械手运动的表示方法
3.1.1机械手的结构
回转关节
棱柱关节
关节变量
手爪姿态
运动学
2019/3/8 3
第三章 机器人运动学和动力学
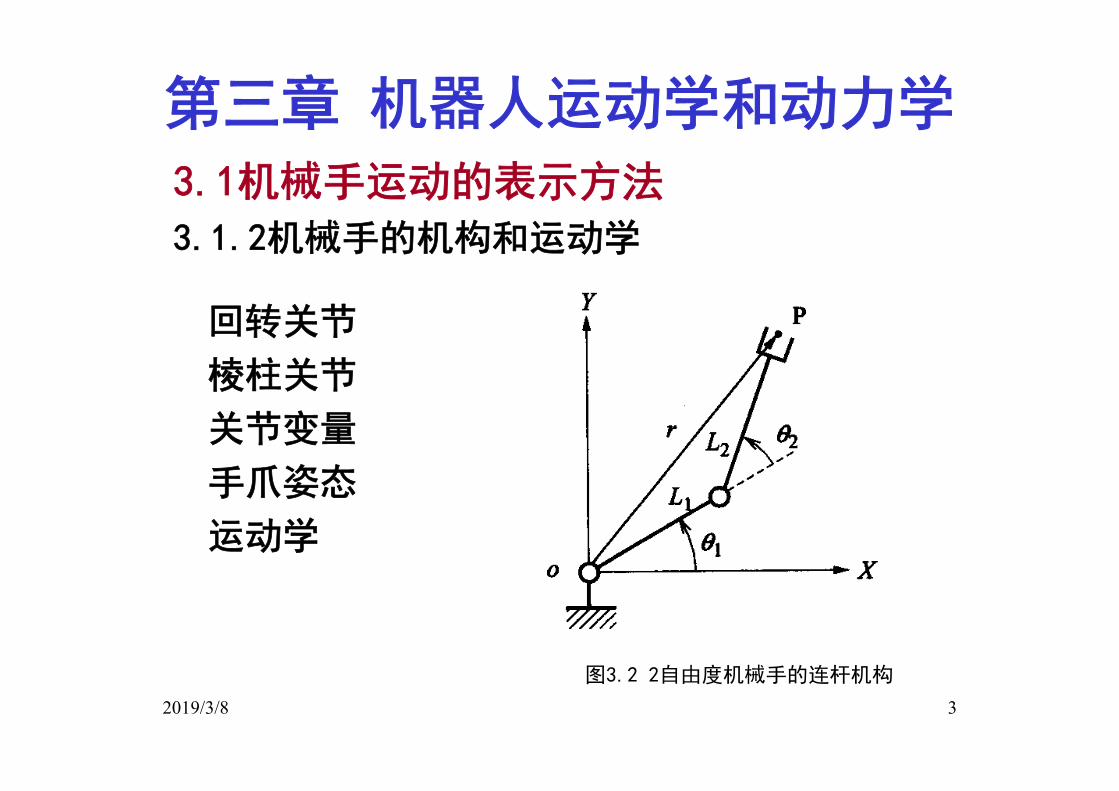
图3.2 2自由度机械手的连杆机构
3.1机械手运动的表示方法
3.1.2机械手的机构和运动学

手爪位置r;关节变量θ
有:
写为: 运动学方程式。
2019/3/8 4
3.1机械手运动的表示方法3.1.2机械手的机构和运动学
第三章 机器人运动学和动力学
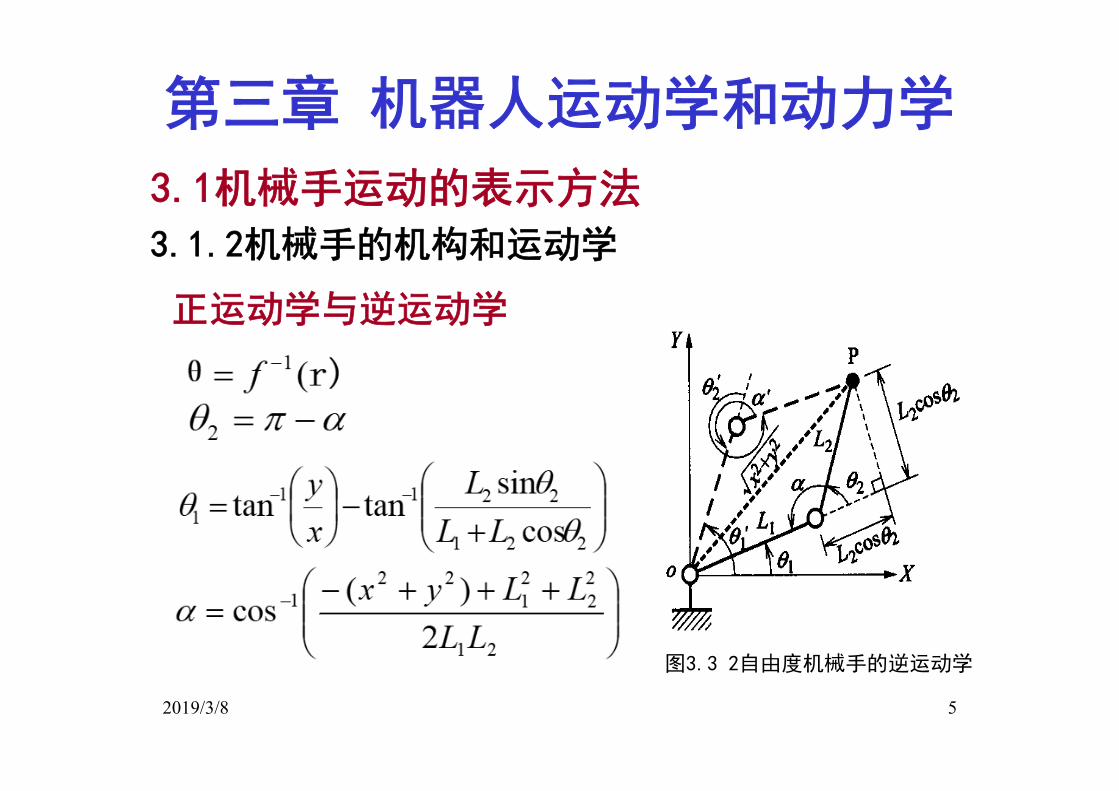
正运动学与逆运动学
2019/3/8 5
图3.3 2自由度机械手的逆运动学
3.1机械手运动的表示方法
3.1.2机械手的机构和运动学
第三章 机器人运动学和动力学
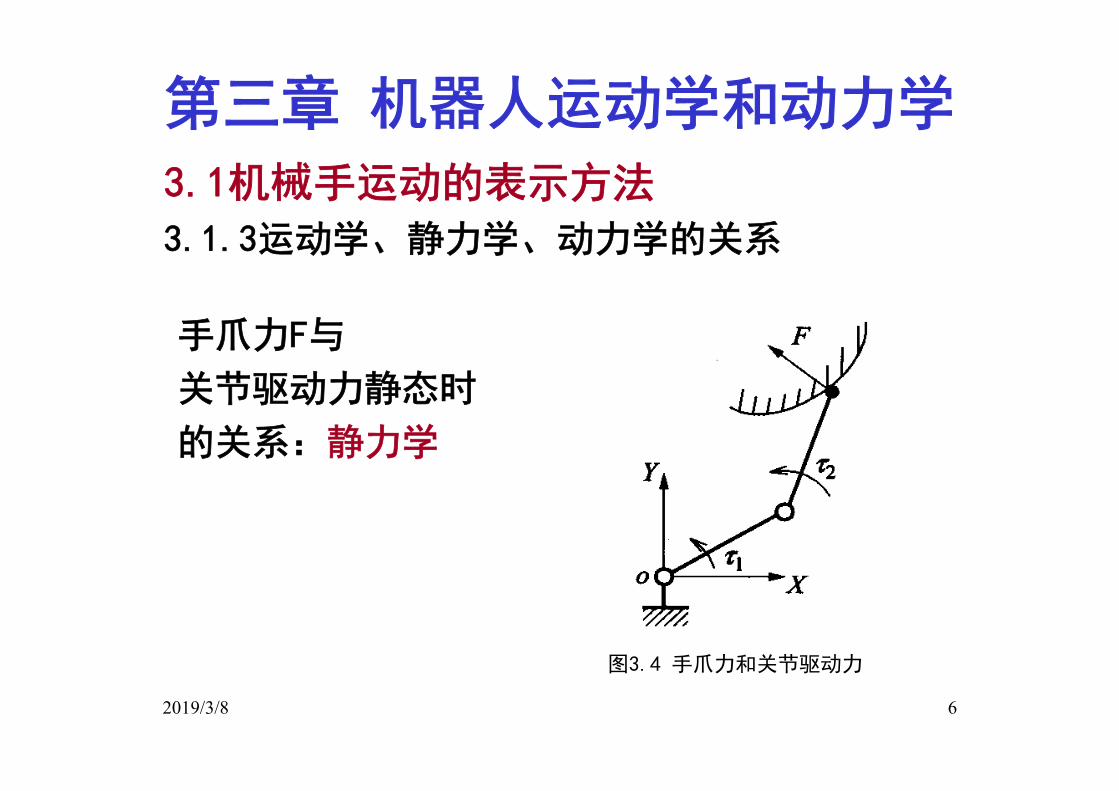
手爪力F与
关节驱动力静态时
的关系:静力学
2019/3/8 6
图3.4 手爪力和关节驱动力
3.1机械手运动的表示方法
3.1.3运动学、静力学、动力学的关系
第三章 机器人运动学和动力学

驱动力矩与关节位置
关节速度、关节加
速度的关系动力学
2019/3/8 7
图3.5 与动力学有关的各量
3.1机械手运动的表示方法
3.1.3运动学、静力学、动力学的关系
第三章 机器人运动学和动力学
2019/3/8 8
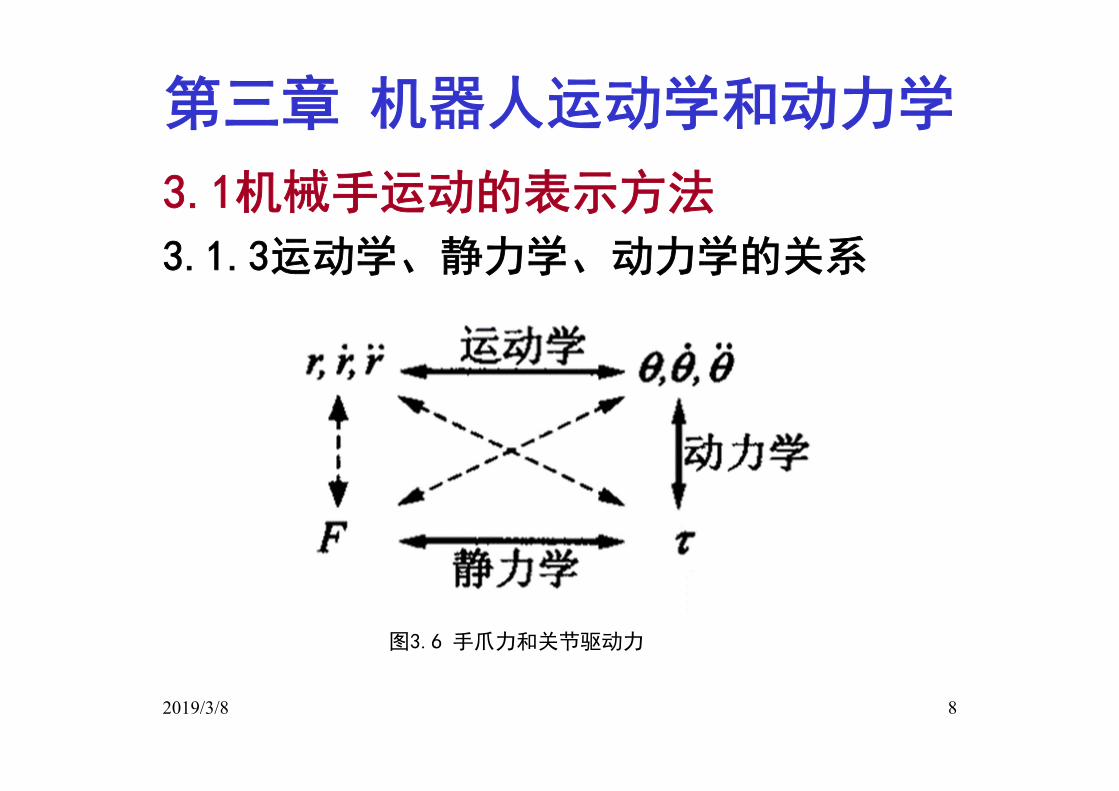
图3.6 手爪力和关节驱动力
3.1机械手运动的表示方法
3.1.3运动学、静力学、动力学的关系
第三章 机器人运动学和动力学
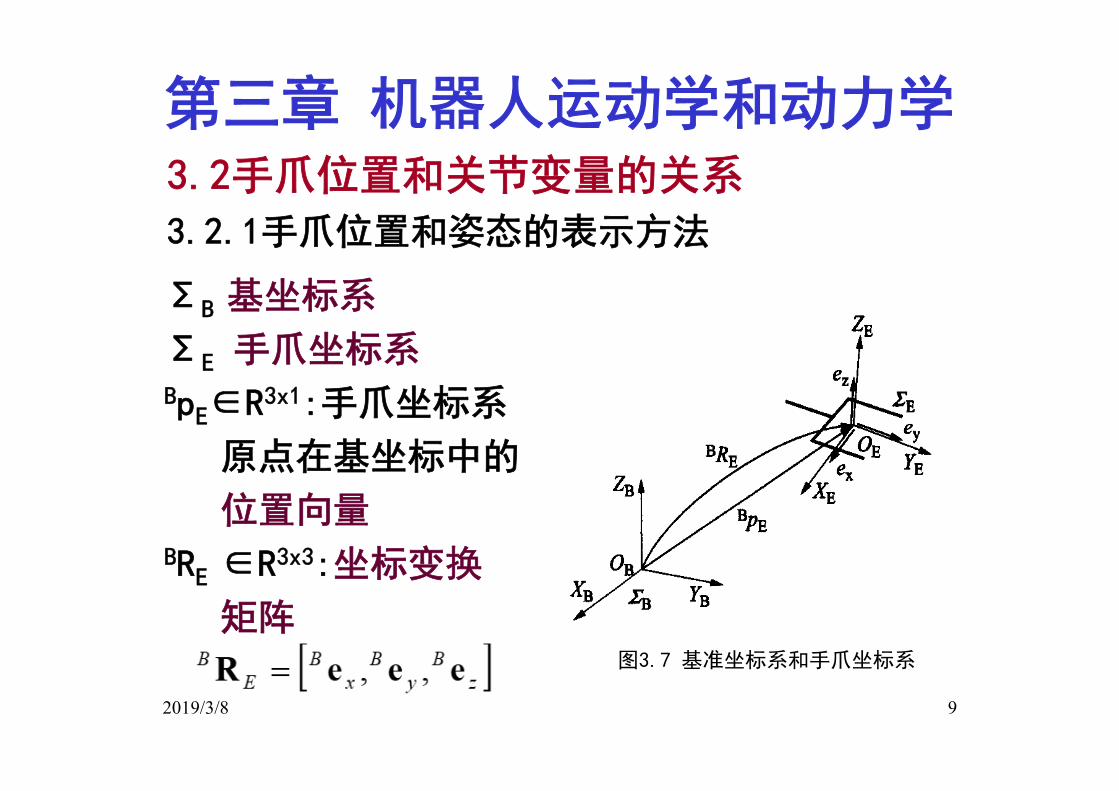
ΣB 基坐标系
ΣE 手爪坐标系BpE∈R3x1:手爪坐标系
原点在基坐标中的
位置向量BRE ∈R3x3:坐标变换
矩阵
2019/3/8 9
图3.7 基准坐标系和手爪坐标系
3.2手爪位置和关节变量的关系
3.2.1手爪位置和姿态的表示方法
第三章 机器人运动学和动力学
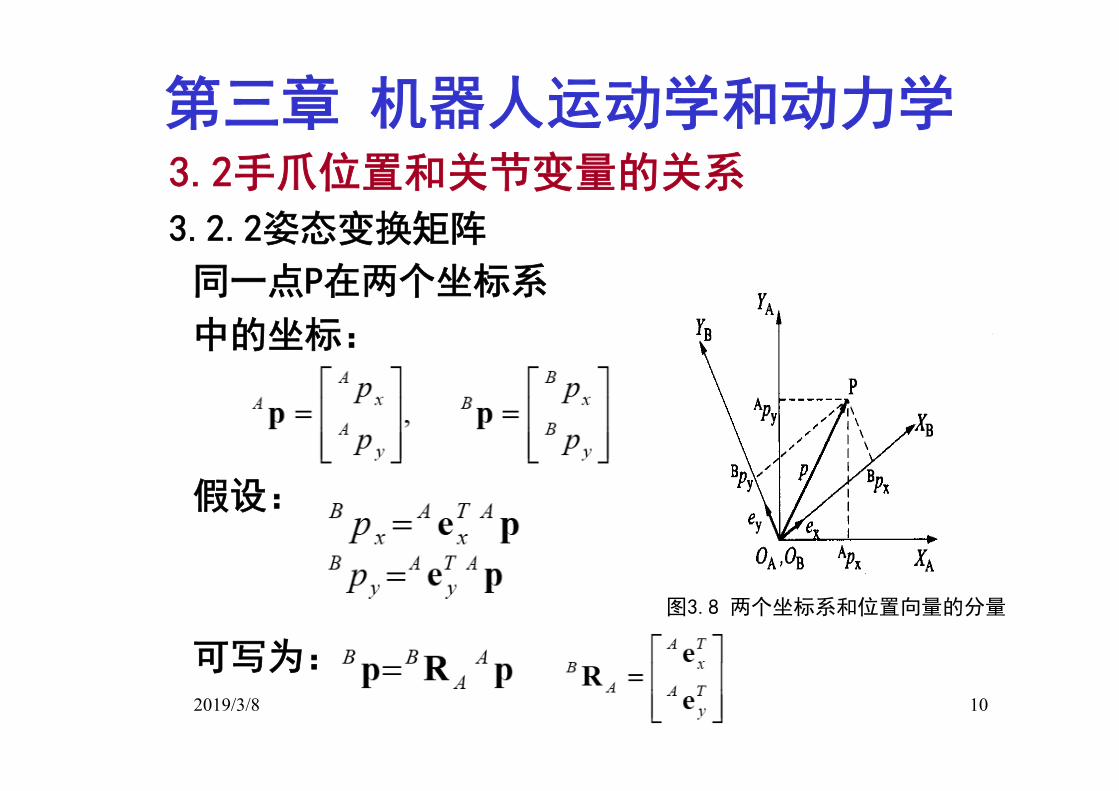
同一点P在两个坐标系
中的坐标:
假设:
可写为:2019/3/8 10
图3.8 两个坐标系和位置向量的分量
3.2手爪位置和关节变量的关系
3.2.2姿态变换矩阵
第三章 机器人运动学和动力学
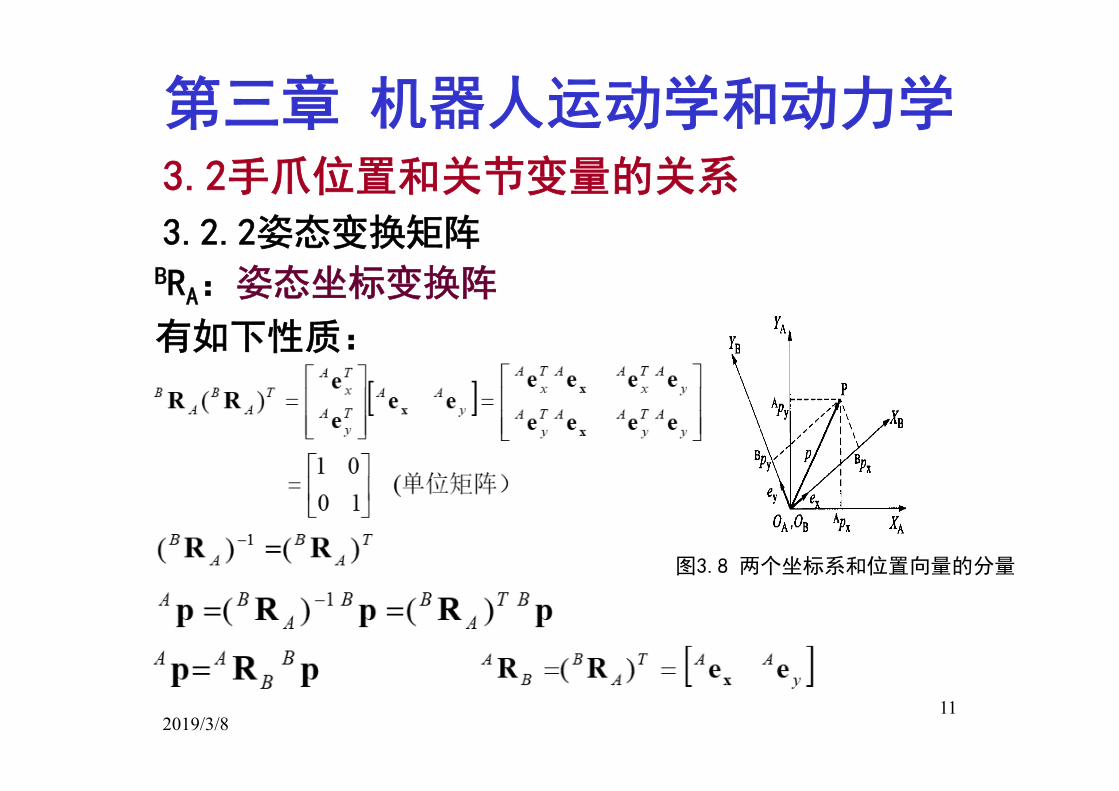
图3.8 两个坐标系和位置向量的分量
BRA:姿态坐标变换阵
有如下性质:
2019/3/811
3.2手爪位置和关节变量的关系
3.2.2姿态变换矩阵
第三章 机器人运动学和动力学
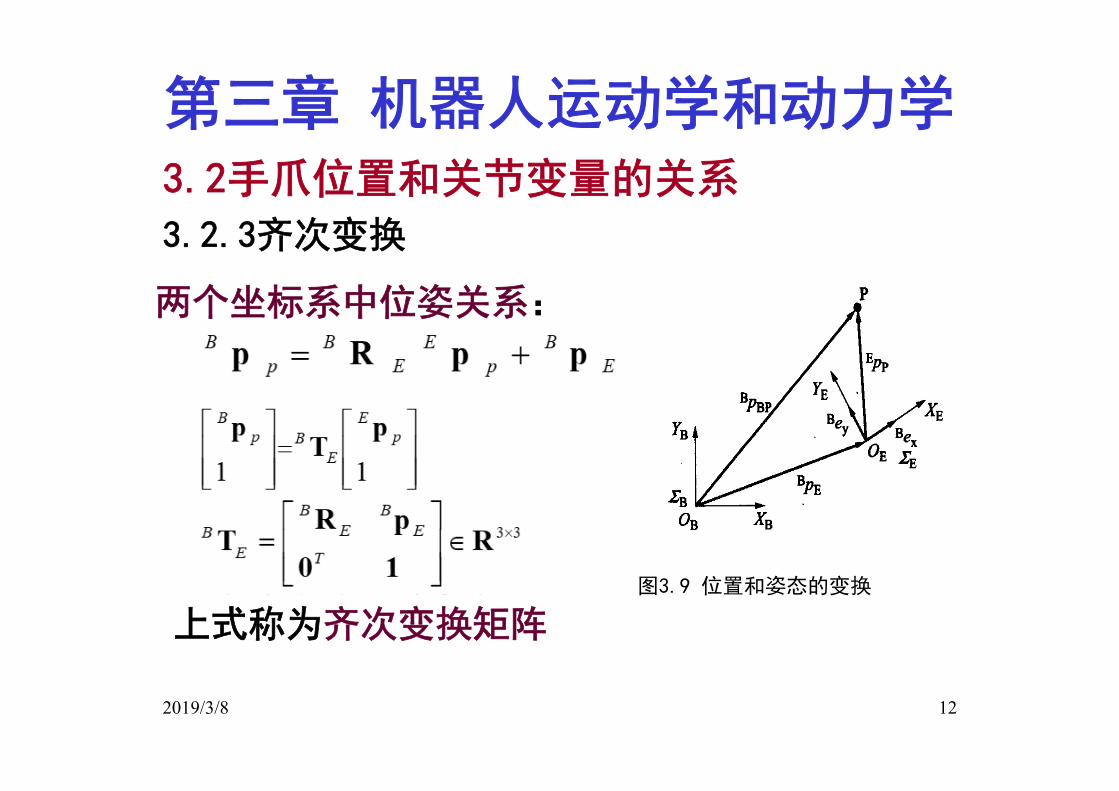
两个坐标系中位姿关系:
上式称为齐次变换矩阵
2019/3/8 12
图3.9 位置和姿态的变换
3.2手爪位置和关节变量的关系
3.2.3齐次变换
第三章 机器人运动学和动力学
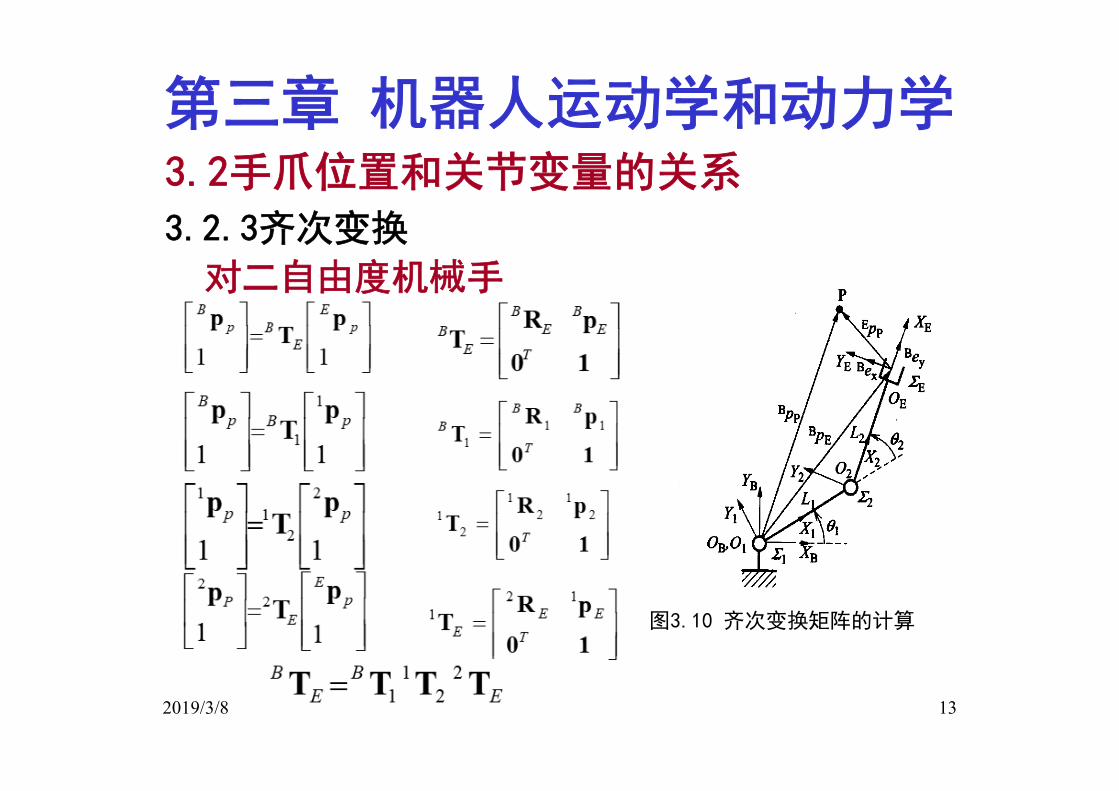
对二自由度机械手
2019/3/8 13
图3.10 齐次变换矩阵的计算
3.2手爪位置和关节变量的关系
3.2.3齐次变换
第三章 机器人运动学和动力学

利用上式的确步骤:
1)建立连杆坐标系,并用
连杆长度和关节变量,
求相邻坐标系的位姿关系
2)求相邻坐标系的齐次变换
矩阵;
3)利用上式求总变换2019/3/8 14
图3.10 齐次变换矩阵的计算
3.2手爪位置和关节变量的关系
3.2.3齐次变换
第三章 机器人运动学和动力学

2019/3/8 15
图3.10 齐次变换矩阵的计算
3.2手爪位置和关节变量的关系
3.2.3齐次变换
第三章 机器人运动学和动力学

2019/3/8 16
图3.10 齐次变换矩阵的计算
3.2手爪位置和关节变量的关系
3.2.3齐次变换
第三章 机器人运动学和动力学
2019/3/8 17
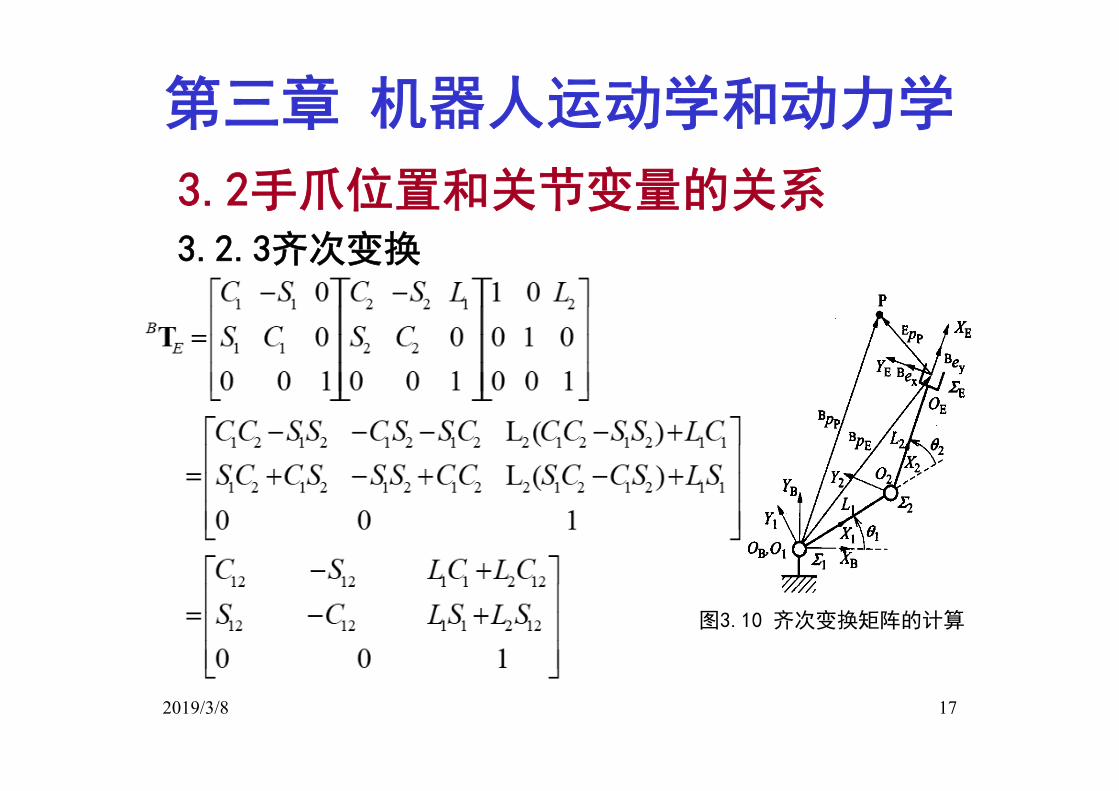
3.2手爪位置和关节变量的关系3.2.3齐次变换
第三章 机器人运动学和动力学
图3.10 齐次变换矩阵的计算

机器人正运动学方程: ,这里
其中:
n>m:冗余机器人
2019/3/8 18
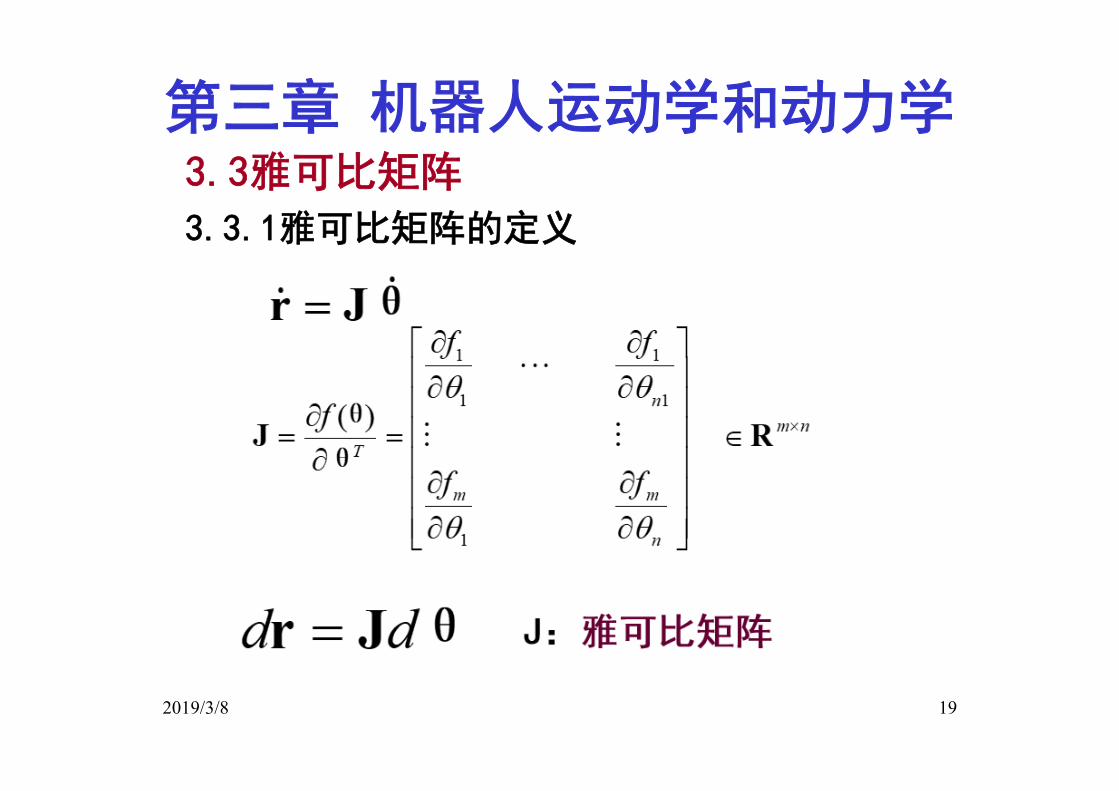
3.3雅可比矩阵
3.3.1雅可比矩阵的定义
第三章 机器人运动学和动力学
2019/3/8 19
3.3雅可比矩阵
3.3.1雅可比矩阵的定义
第三章 机器人运动学和动力学

例:两自由度机械手的雅可比矩阵
2019/3/8 20
3.3雅可比矩阵
3.3.1雅可比矩阵的定义
第三章 机器人运动学和动力学
图3.2 2自由度机械手的连杆机构
2019/3/8 21
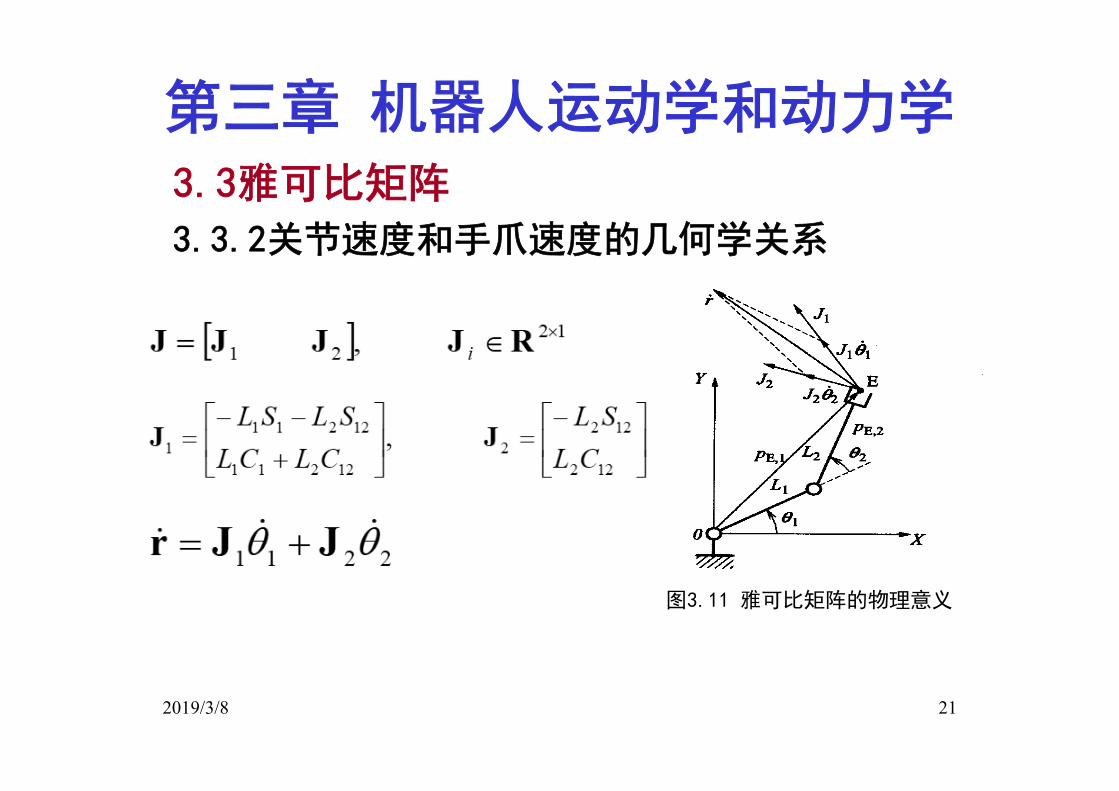
图3.11 雅可比矩阵的物理意义
3.3雅可比矩阵
3.3.2关节速度和手爪速度的几何学关系
第三章 机器人运动学和动力学
2019/3/8 22
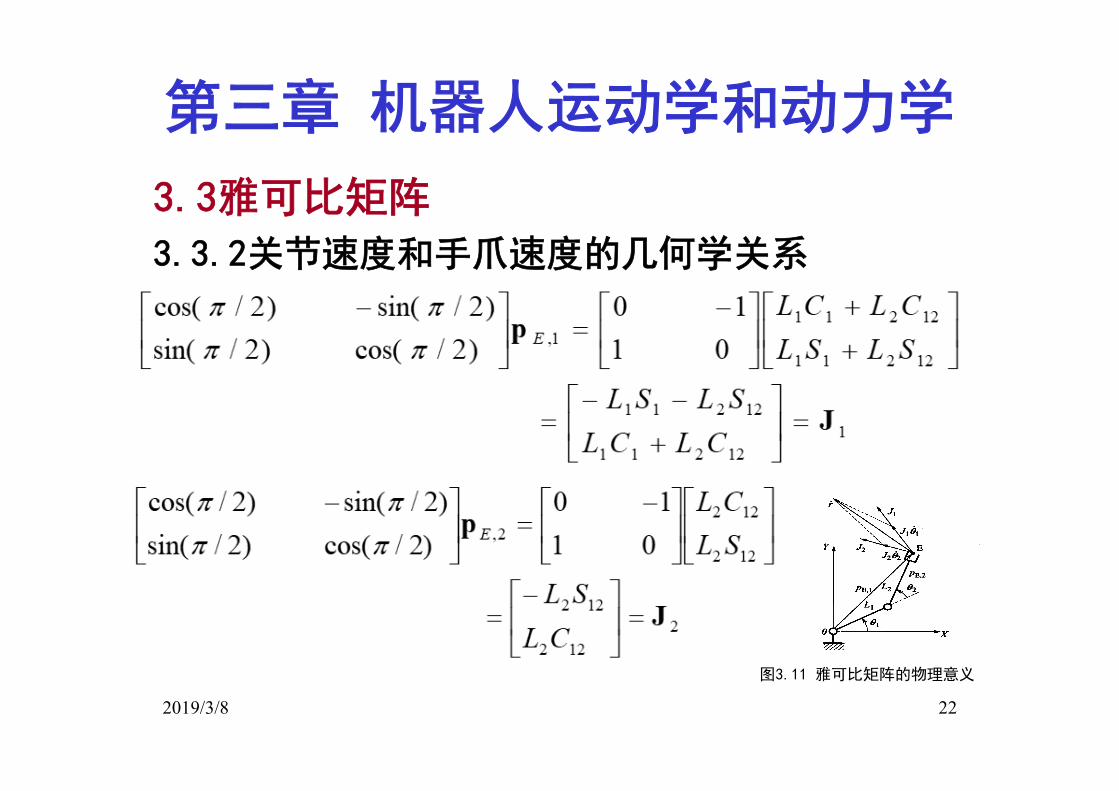
图3.11 雅可比矩阵的物理意义
3.3雅可比矩阵
3.3.2关节速度和手爪速度的几何学关系
第三章 机器人运动学和动力学
2019/3/8 23
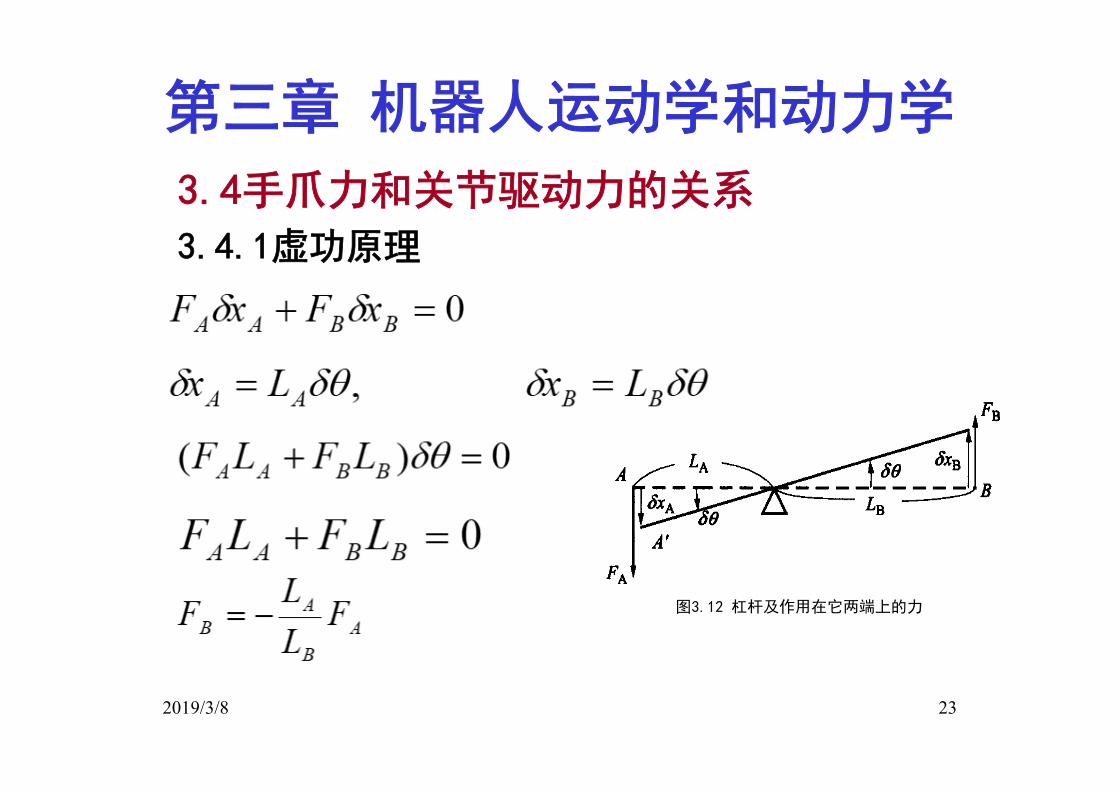
图3.12 杠杆及作用在它两端上的力
3.4手爪力和关节驱动力的关系
3.4.1虚功原理
第三章 机器人运动学和动力学

手爪力
关节驱动力
2019/3/8 24
图3.13 机械手的虚位移和施加的力
3.4手爪力和关节驱动力的关系
3.4.2机械手静力学关系式的推导
第三章 机器人运动学和动力学

2019/3/8 25
图3.13 机械手的虚位移和施加的力
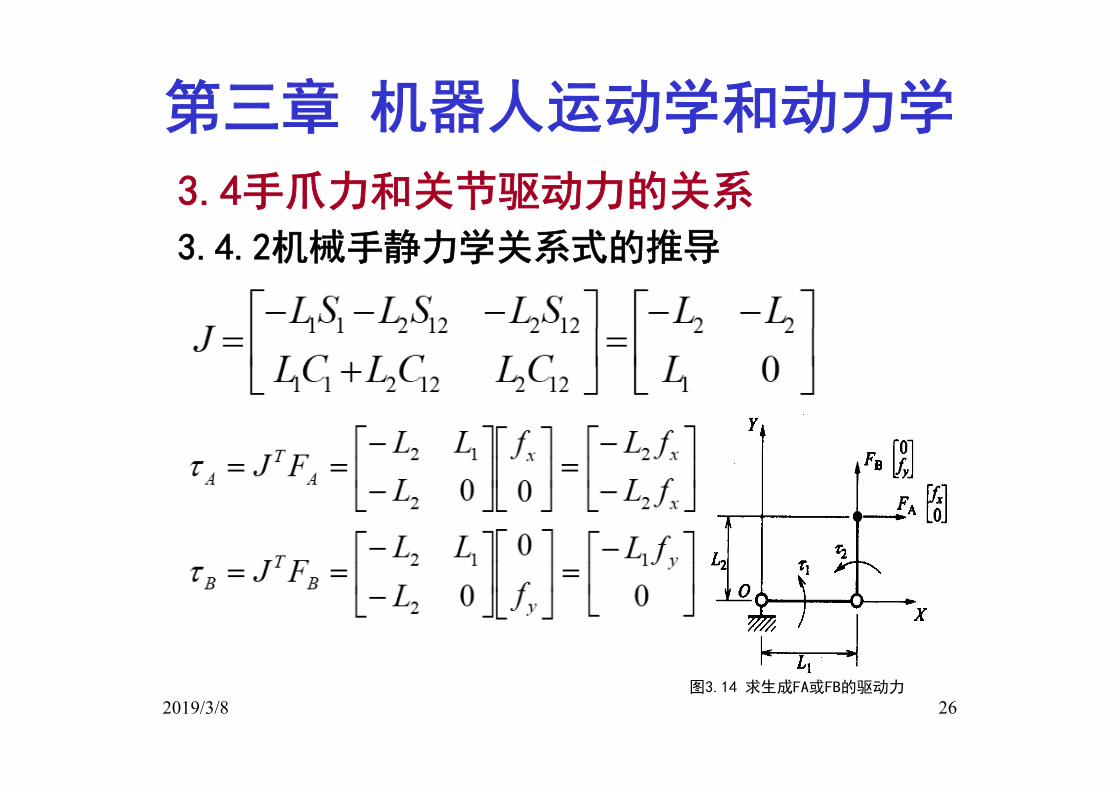
3.4手爪力和关节驱动力的关系
3.4.2机械手静力学关系式的推导
第三章 机器人运动学和动力学
2019/3/8 26
3.4手爪力和关节驱动力的关系
3.4.2机械手静力学关系式的推导
第三章 机器人运动学和动力学
图3.14 求生成FA或FB的驱动力
2019/3/8 27
图3.15 平移运动作为回转运动的解析
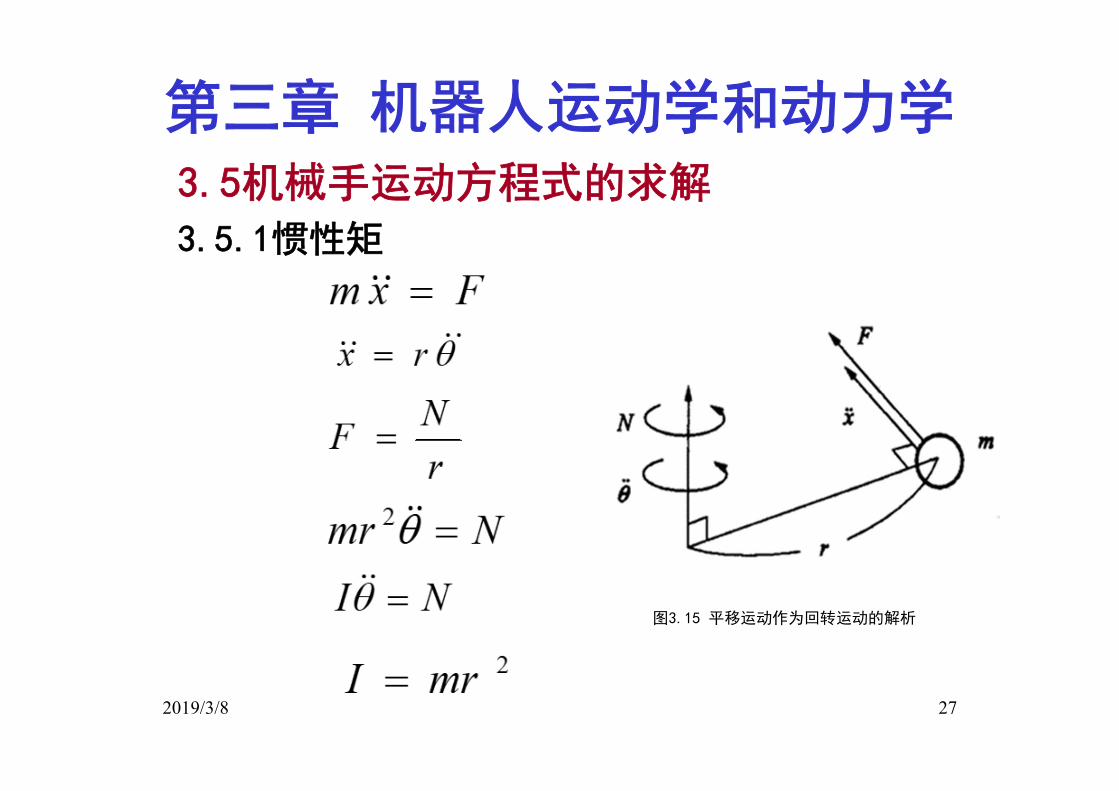
3.5机械手运动方程式的求解
3.5.1惯性矩
第三章 机器人运动学和动力学

绕一端旋转惯性矩
绕重心旋转惯性矩
28
图3.16 a.绕杆一端回转的惯性矩I;b.绕重心旋转的惯性矩I
a
b
3.5机械手运动方程式的求解
3.5.1惯性矩
第三章 机器人运动学和动力学
2019/3/8
2019/3/8 29
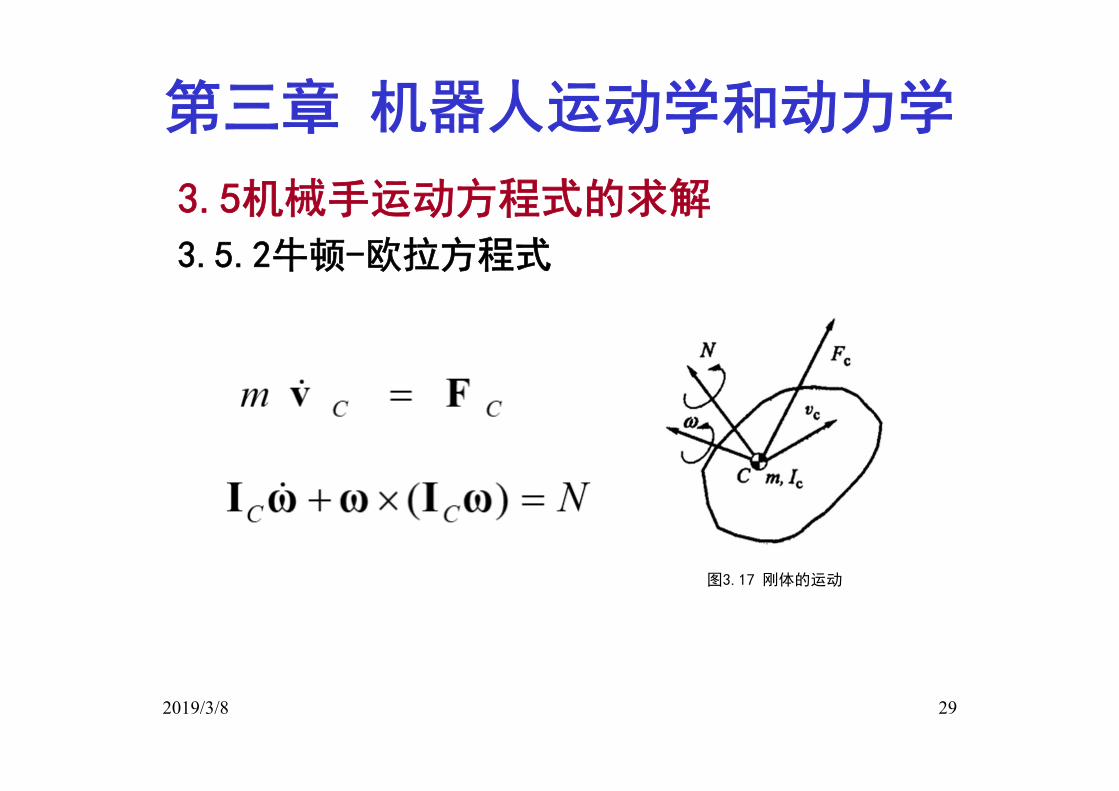
图3.17 刚体的运动
3.5机械手运动方程式的求解
3.5.2牛顿-欧拉方程式
第三章 机器人运动学和动力学
2019/3/8 30
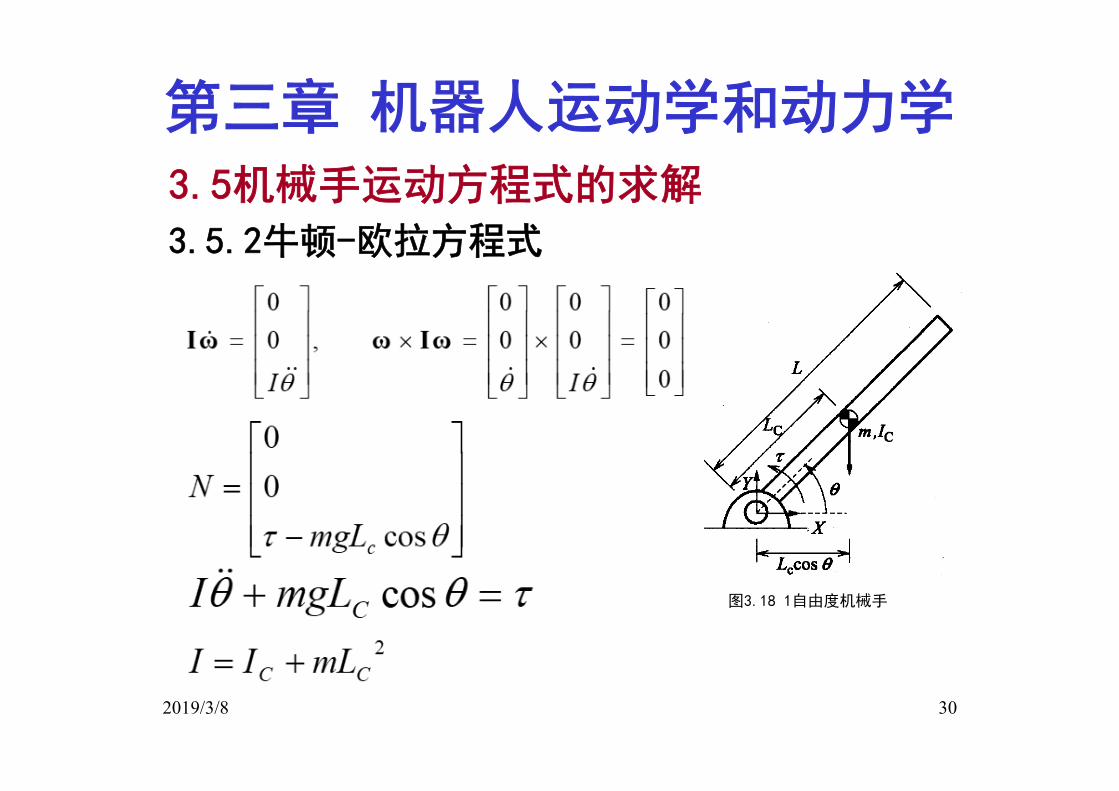
图3.18 1自由度机械手
3.5机械手运动方程式的求解
3.5.2牛顿-欧拉方程式
第三章 机器人运动学和动力学
2019/3/8 31
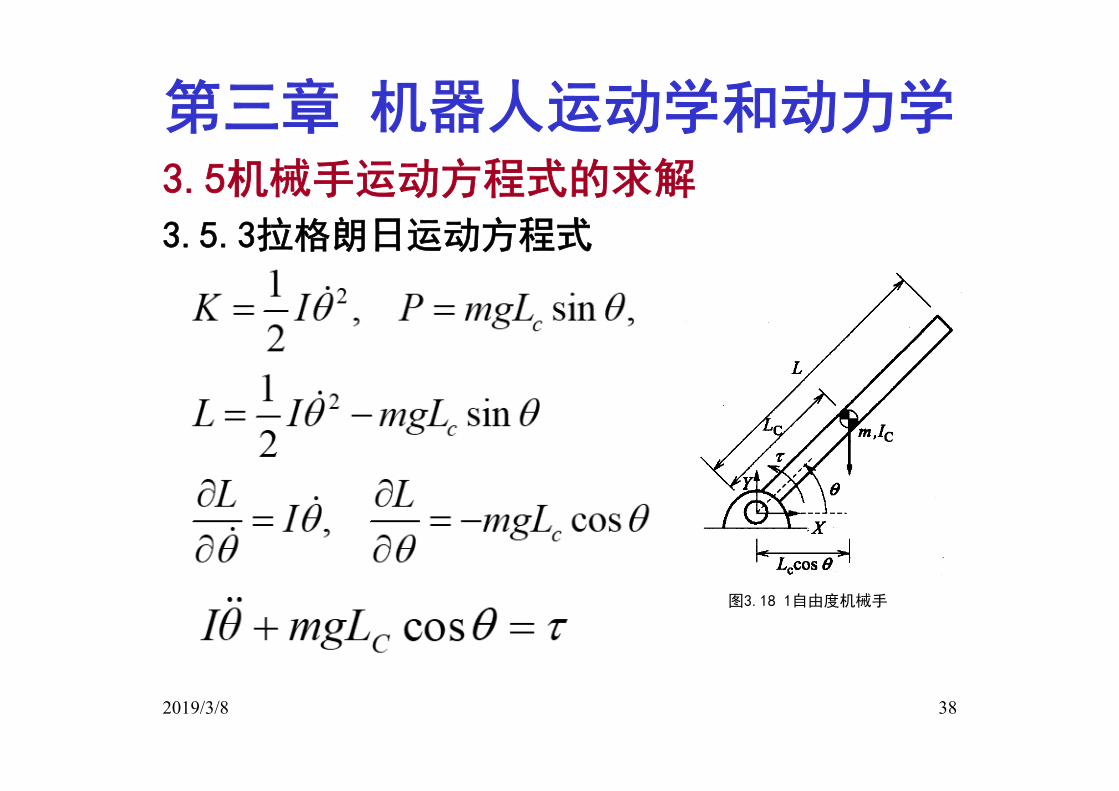
图3.18 1自由度机械手
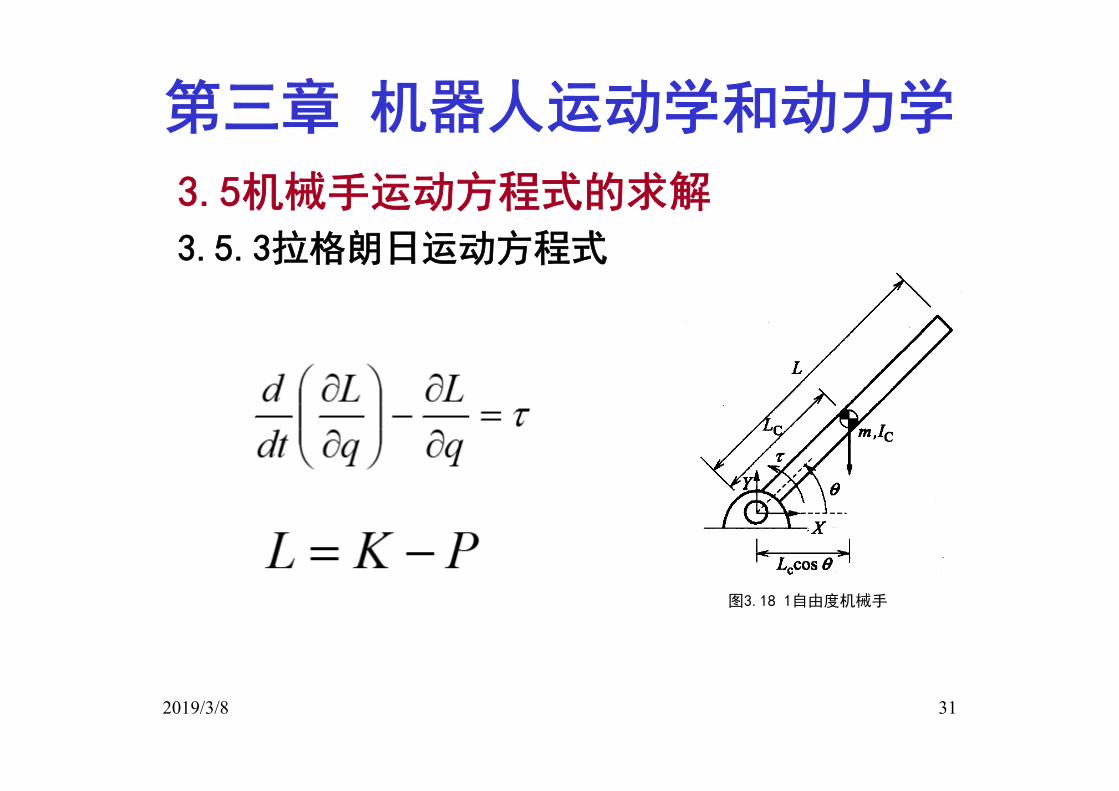
3.5机械手运动方程式的求解
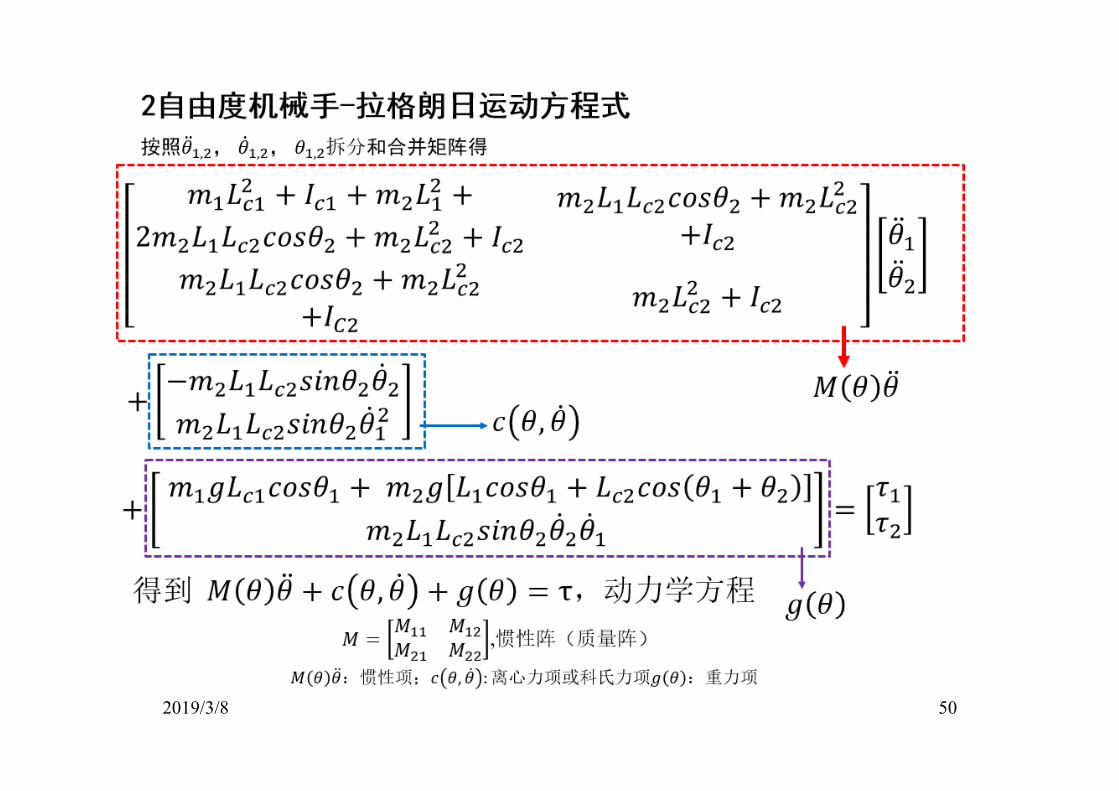
3.5.3拉格朗日运动方程式
第三章 机器人运动学和动力学

Lagrange方程
T:系统动能;
qj:广义坐标;Qj:对应于广义坐标的广义力
当主动力为势力时,方程变为:
L:Lagrange函数
2019/3/8 32
3.5机械手运动方程式的求解
3.5.3拉格朗日运动方程式
第三章 机器人运动学和动力学
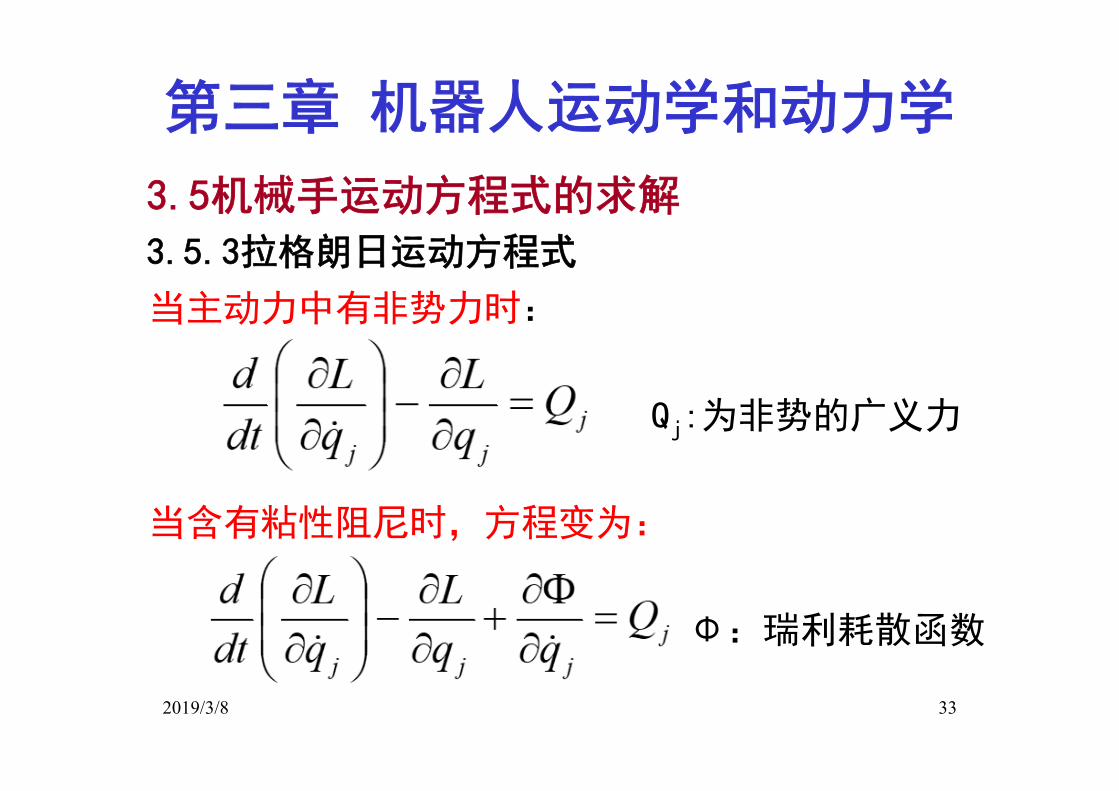
当主动力中有非势力时:
Qj:为非势的广义力
当含有粘性阻尼时,方程变为:
,Φ:瑞利耗散函数
2019/3/8 33
3.5机械手运动方程式的求解
3.5.3拉格朗日运动方程式
第三章 机器人运动学和动力学

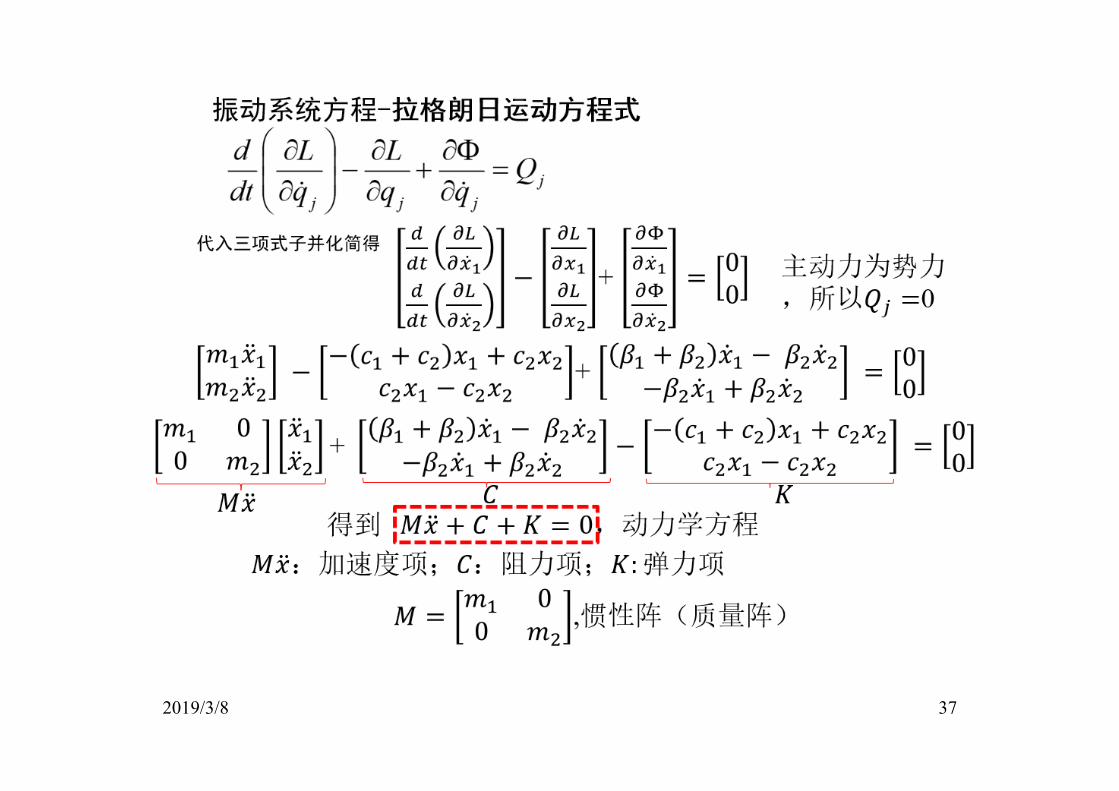
例:图示为振动系统方程1.动能
2.势能
2019/3/8 34
3.5机械手运动方程式的求解
3.5.3拉格朗日运动方程式
第三章 机器人运动学和动力学
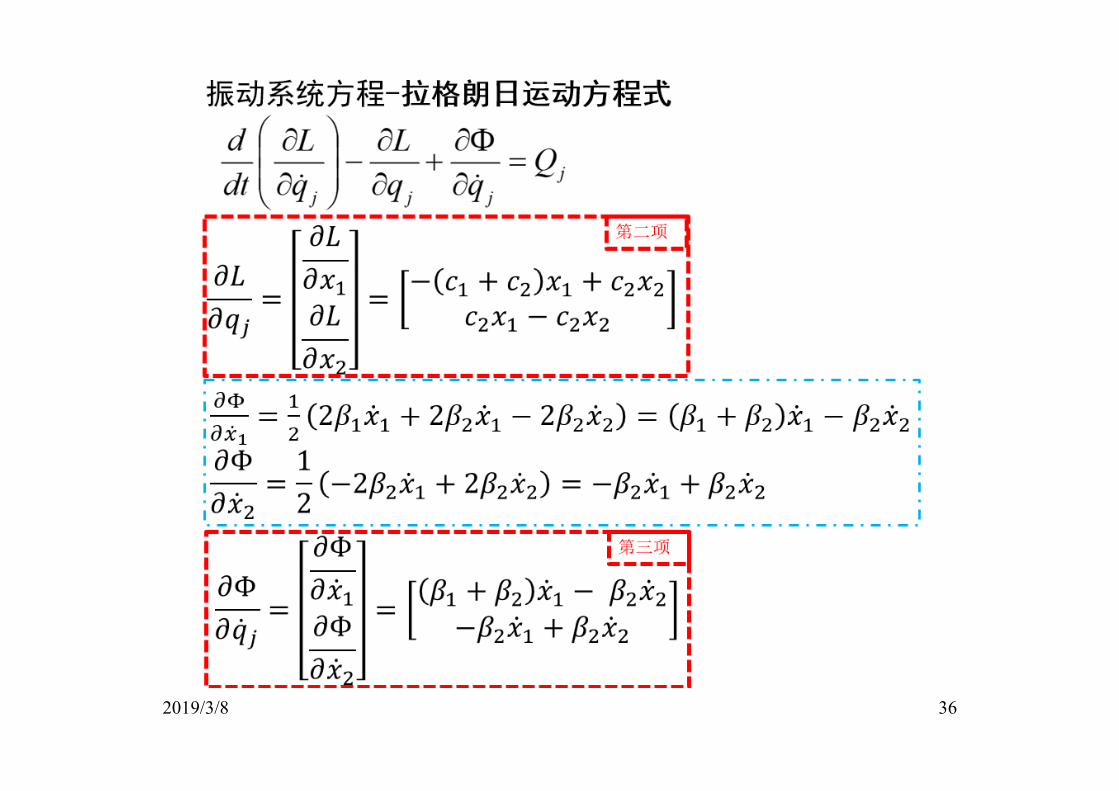
3.耗散函数
拉格朗日函数
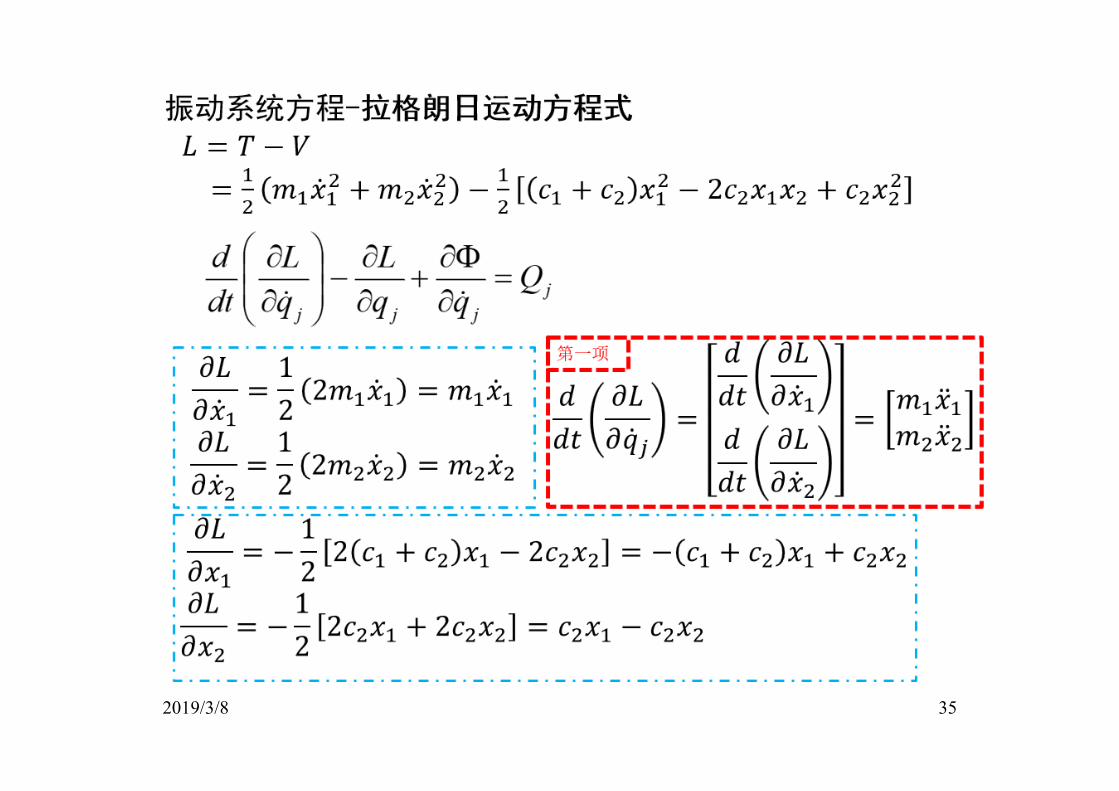
2019/3/8 35
2019/3/8 36
2019/3/8 37
2019/3/8 38
图3.18 1自由度机械手
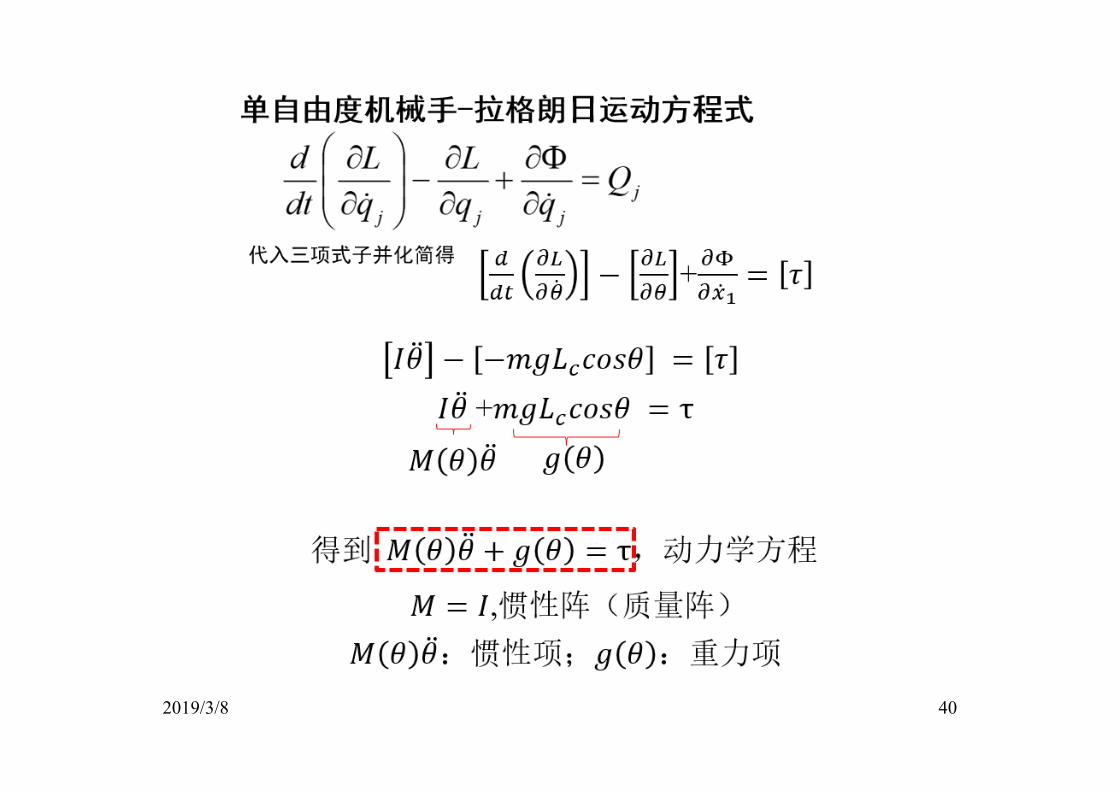
3.5机械手运动方程式的求解
3.5.3拉格朗日运动方程式
第三章 机器人运动学和动力学

2019/3/8 39
2019/3/8 40
2019/3/8 41
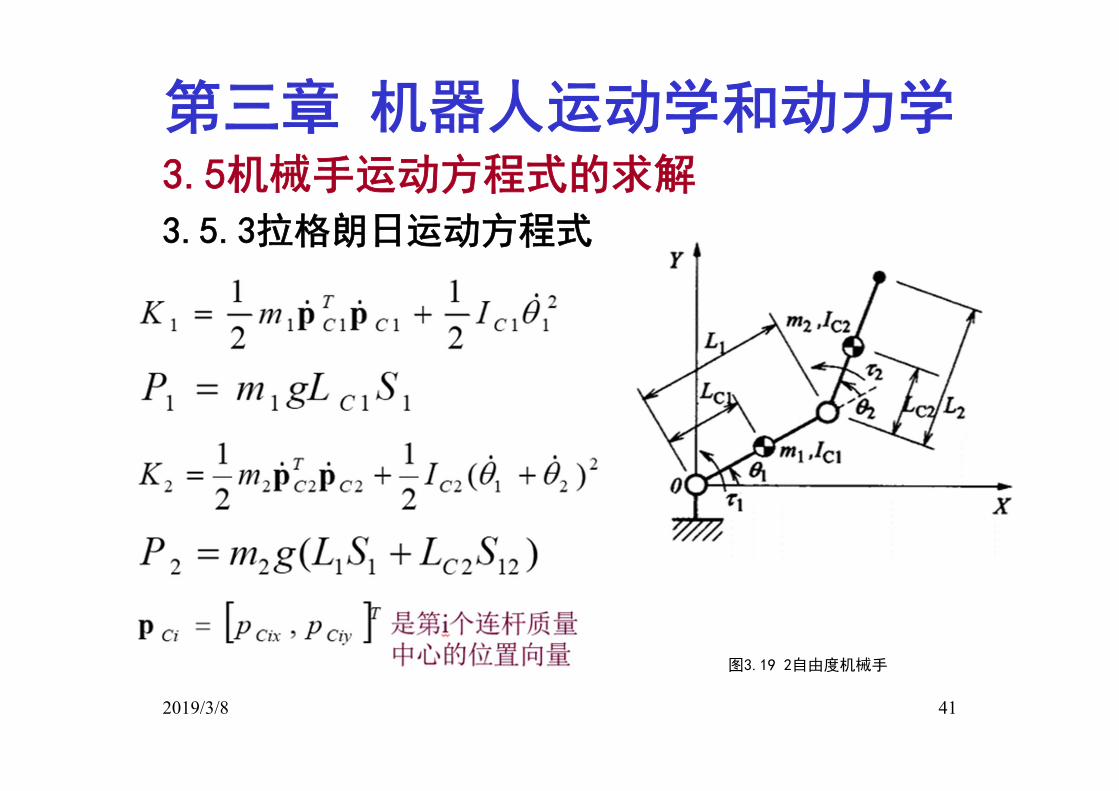
图3.19 2自由度机械手
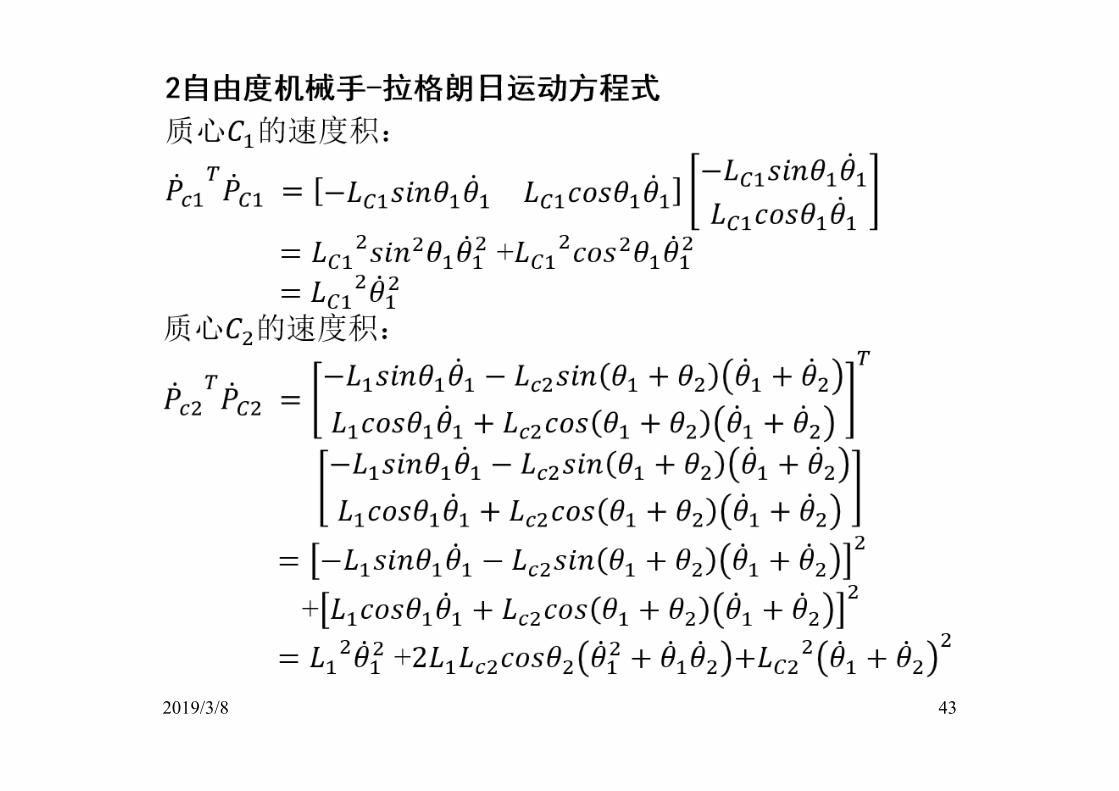
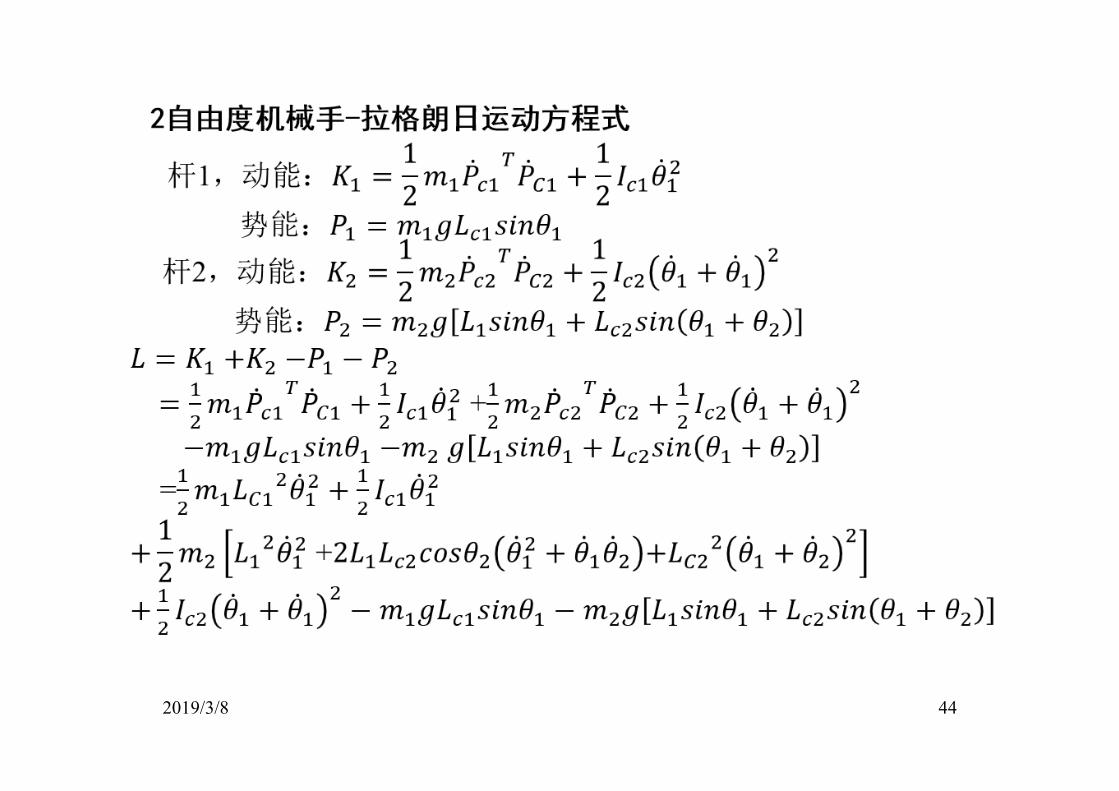
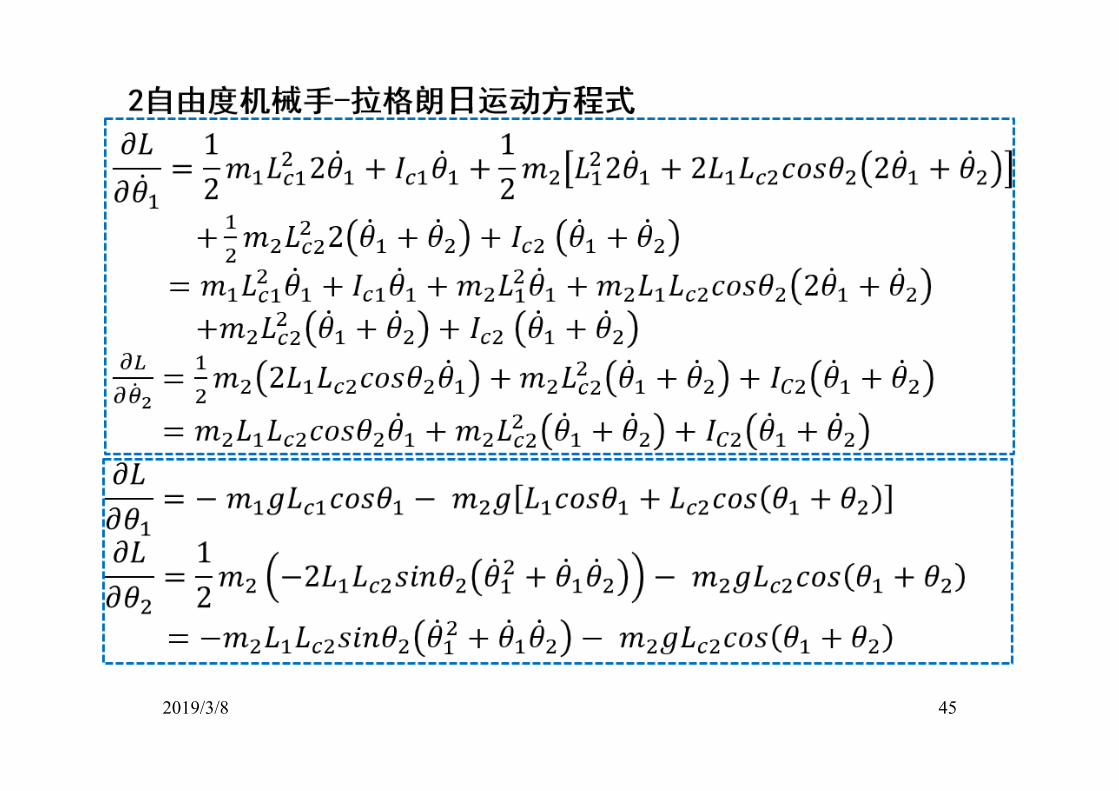
3.5机械手运动方程式的求解
3.5.3拉格朗日运动方程式
第三章 机器人运动学和动力学

2019/3/8 42
2019/3/8 43
2019/3/8 44
2019/3/8 45

2019/3/8 46

2019/3/8 47

2019/3/8 48
2019/3/8 49
2019/3/8 50
2019/3/8 51
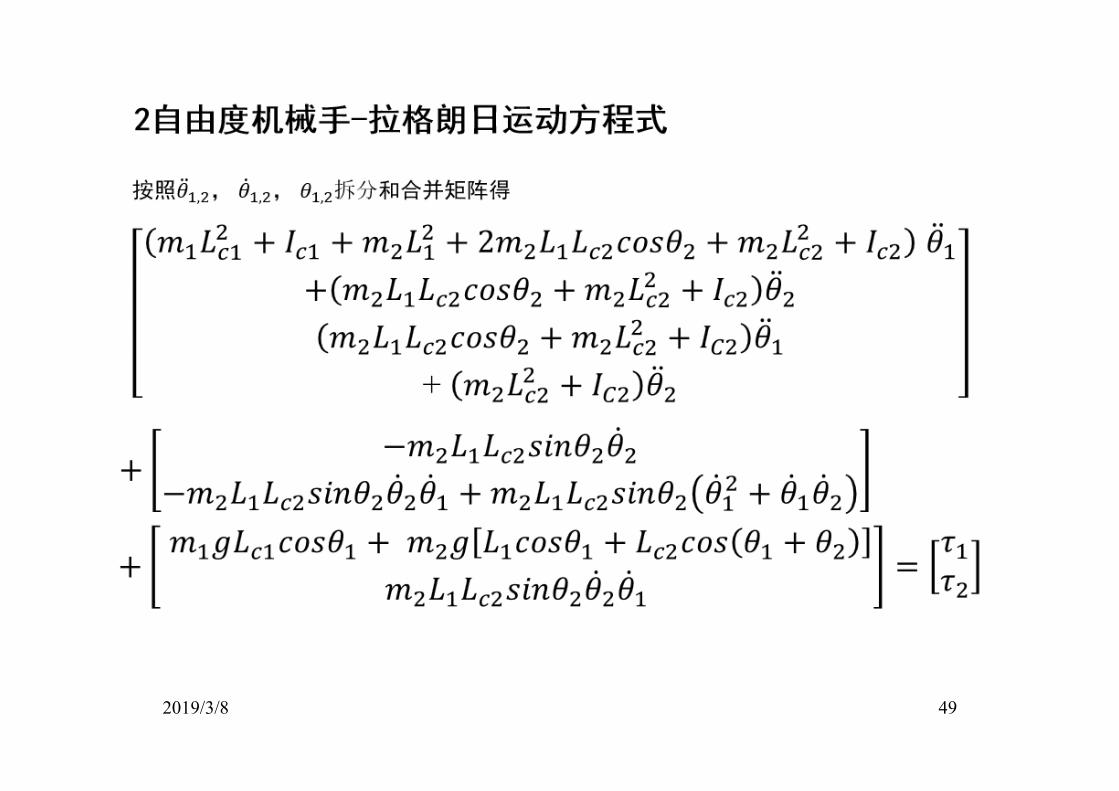
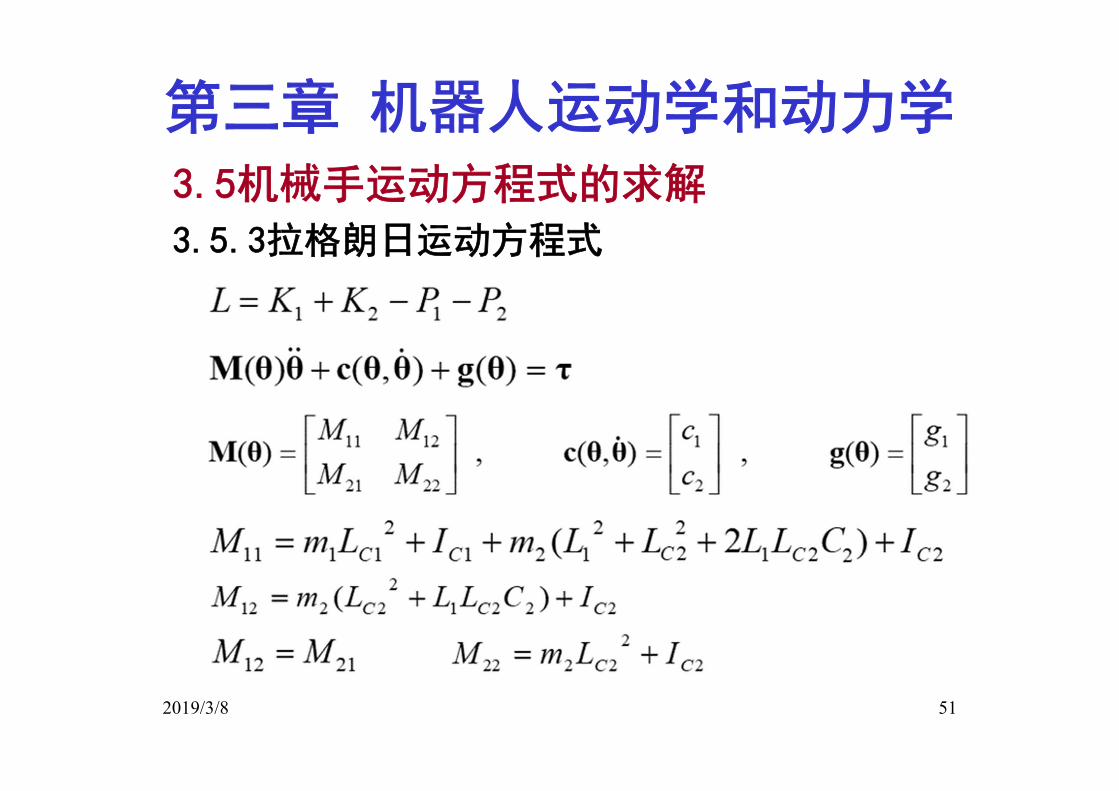
3.5机械手运动方程式的求解
3.5.3拉格朗日运动方程式
第三章 机器人运动学和动力学
2019/3/8 52
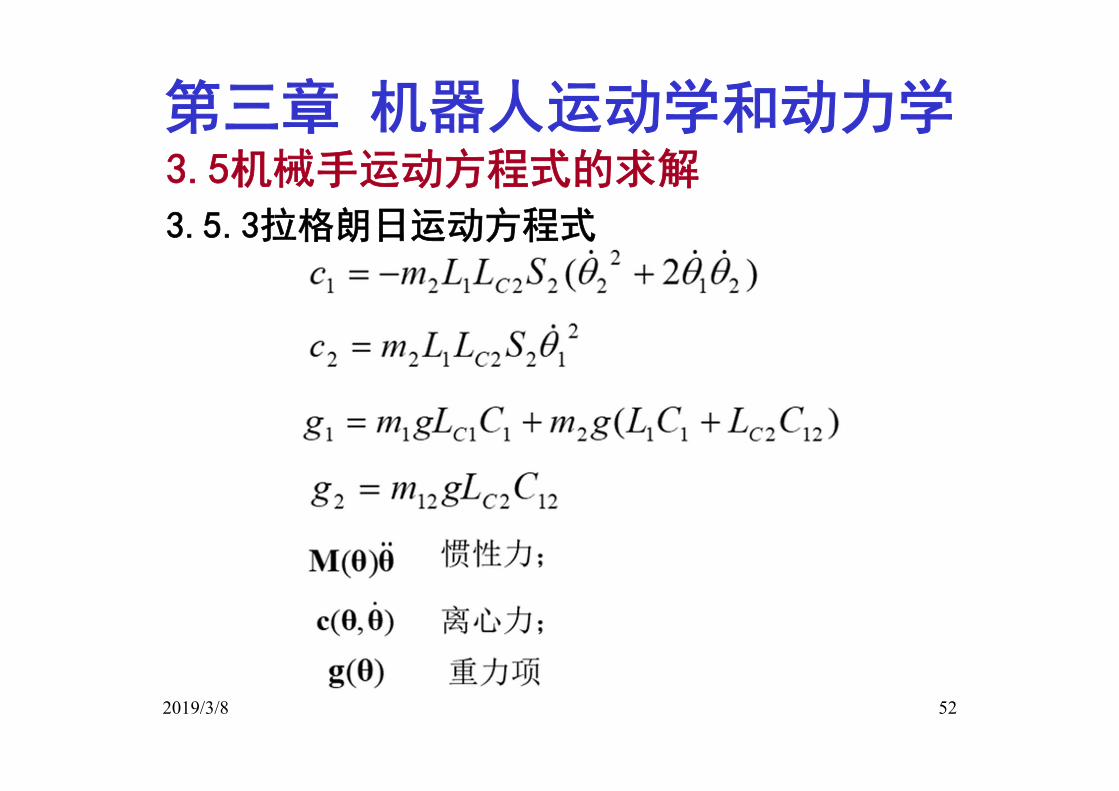
3.5机械手运动方程式的求解
3.5.3拉格朗日运动方程式
第三章 机器人运动学和动力学