estructura ii trabajo
TRANSCRIPT
Republica Bolivariana de Venezuela I.U.P “Santiago Mariño”
Extensión Maturín Escuela de Ingeniería Civil
Estructura II
Método de los Desplazamientos
Profesor: Sergio Rodríguez
Intensivo
Maturín, Septiembre de 2013

Introducción
Cuando se habla de solucionar una estructura hablamos de encontrar las relaciones entre las fuerzas aplicadas y las fuerzas de reacción, las fuerzas internas en todos los puntos y las deformaciones.
Para estructuras estáticas solo es necesario plantear las ecuaciones de equilibrio para encontrar fuerzas de reacción ya que estas no sobrepasan en número a las ecuaciones de equilibrio. Una vez tengamos las reacciones procedemos a encontrar las fuerzas internas por equilibrio de secciones y de ahí encontramos las deformaciones por los métodos de la doble integración o trabajo virtual.
En la solución de estructuras estáticamente indeterminadas tenemos que solucionar simultáneamente las ecuaciones de equilibrio, compatibilidad de deformaciones y las de relaciones de fuerzas y desplazamientos (leyes constitutivas del material). Observe que para las estructuras estáticas los métodos de encontrar las deformaciones involucran la compatibilidad y las relaciones fuerza-desplazamiento concluyendo que estas ecuaciones se deben cumplir en todo tipo de estructura.
El método de las flexibilidades y el método de los desplazamientos o rigideces representan dos enfoques diferentes en el análisis de estructuras. La diferencia fundamental radica en que el método de las flexibilidades toma como incógnitas las redundantes estáticas, mientras que el método de los desplazamientos toma como incógnitas a las redundantes cinemáticas.
El método de los desplazamientos consiste en asignar a la estructura de barras un objeto matemático, llamado matriz de rigidez, que relaciona los desplazamientos de un conjunto de puntos de la estructura, llamados nodos, con las fuerzas exteriores que es necesario aplicar para lograr esos desplazamientos (las componentes de esta matriz son fuerzas generalizadas asociadas a desplazamientos generalizados)
Métodos matriciales
Consiste en remplazar la estructura continua real por un modelo matemático de elementos estructurales finitos, cuyas propiedades pueden expresarse en forma matricial. El proceso de análisis se puede considerar como:
• Acción sobre la estructura
• Acción sobre los elementos
•Respuesta de los elementos
• Respuesta de la estructura
Los métodos matriciales tienen dos grandes variantes: el método de la flexibilidad en el cual las incógnitas son las fuerzas y el método de la rigidez en el cual las incógnitas son los desplazamientos. Este enfoque se trabaja en todos los métodos del análisis estructural. Sin embargo, por ventajas computacionales el método de la rigidez ha ganado más aceptación.
Grados de libertadSon los desplazamientos independientes (traslaciones y rotaciones) de los nodos que son
necesarios para especificar la forma deformada de una estructura, cuando se vaya a sujetar a una carga arbitraria.
Los grados de libertad corresponden a las posibles formas de moverse que tiene una estructura, con ellos se puede describir la figura deformada de una estructura. Estos se miden en los puntos de unión de elementos (nudos) o en los apoyos.
En apoyos sabemos determinar cuando un grado de libertad es libre o restringido, en nudos también podemos identificar los grados de libertad libres.
Para una estructura completa podemos contar los grados de libertad libres identificando los de los apoyos y después los de los nudos.
Indeterminación Estática (grados de indeterminación o número de redundantes)
Se refiere al número de acciones (fuerza axial, cortante o momento) externos y/o internos) que deben liberarse a fin de transformar la estructura original en una estructura estable y determinada.
Indeterminación Cinemática (grados de libertad)
Se refiere al número de componentes de desplazamiento de nudo (traslación, rotación) que son necesarios para describir la respuesta del sistema. Define la configuración deformada del sistema.
Método de los Desplazamientos o Rigideces
En este método se obtiene, primero, una estructura modificada, bloqueando los desplazamientos de todos los nudos que son fáciles de analizar. Luego, se superponen otras soluciones complementarias para determinar los verdaderos desplazamientos que ocurren en los nudos. El número de ecuaciones a resolver es igual al número del grado de indeterminación cinemática. Primero se aplica el principio de compatibilidad y luego el de equilibrio.
En este método se trabaja con los tres tipos de ecuaciones aplicadas a los nudos de la estructura dejando como incógnitas los desplazamientos de los grados de libertad libres. Notamos que es una forma completamente distinta de trabajar, pero que analizando más detenidamente es simplemente el método de los nudos.
Pasos a seguir para aplicar el Método de los Desplazamientos
1.- Definición de las incógnitas, redundantes cinemáticas obteniendo de esta manera la estructura primaria.
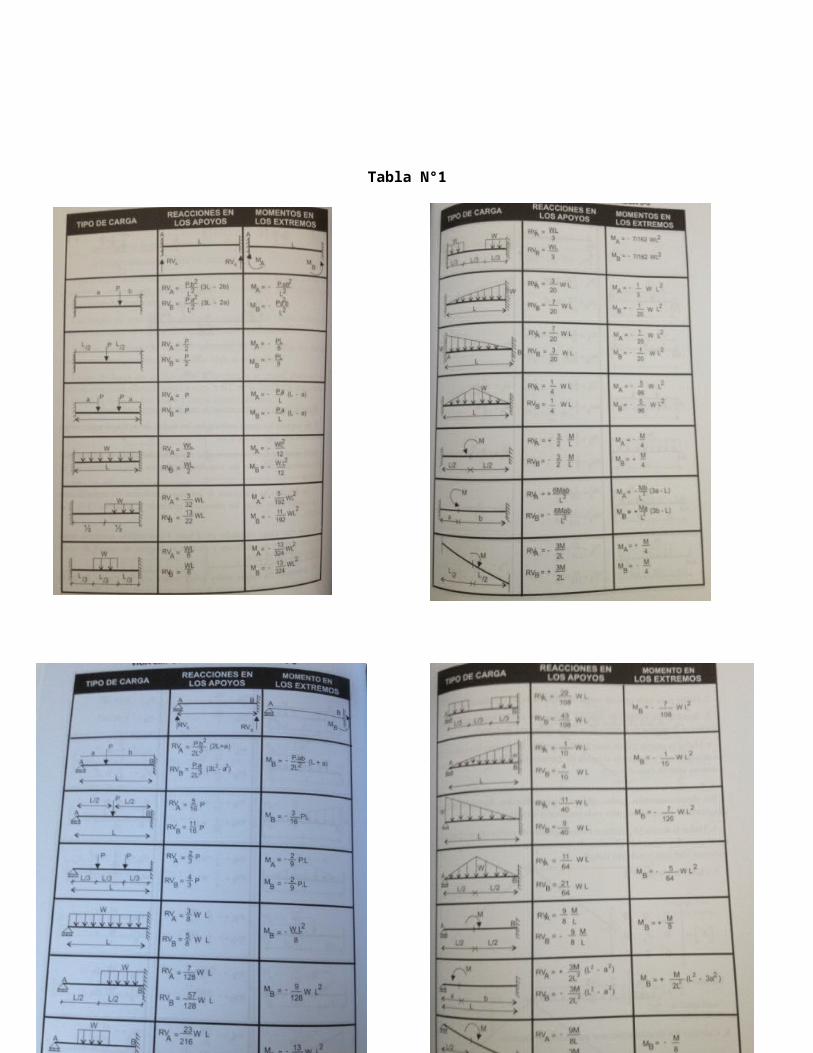
2.- Condición Cero : Restringir la estructura contra cualquier posibilidad de movimiento dando lugar a una estructura cinematicamente determinada, la cual se resuelve aplicando los valores de la tabla N° 1 obteniéndose de esta manera la matriz de fuerzas o momentos [R].
3.- Condiciones unitarias: Resolver las condiciones unitarias dando valores unitarios a los desplazamientos para cada una de las redundantes y en la dirección de las redundantes.
Las fuerzas y momentos inducidos para cada caso serán los coeficientes de rigidez [K].
4.- Repetir procedimiento para (n) redundantes.
5.- Plantear la ecuación de equilibrio estático en la misma localización y dirección de las redundantes:
[D] = - [K]-1 [R]
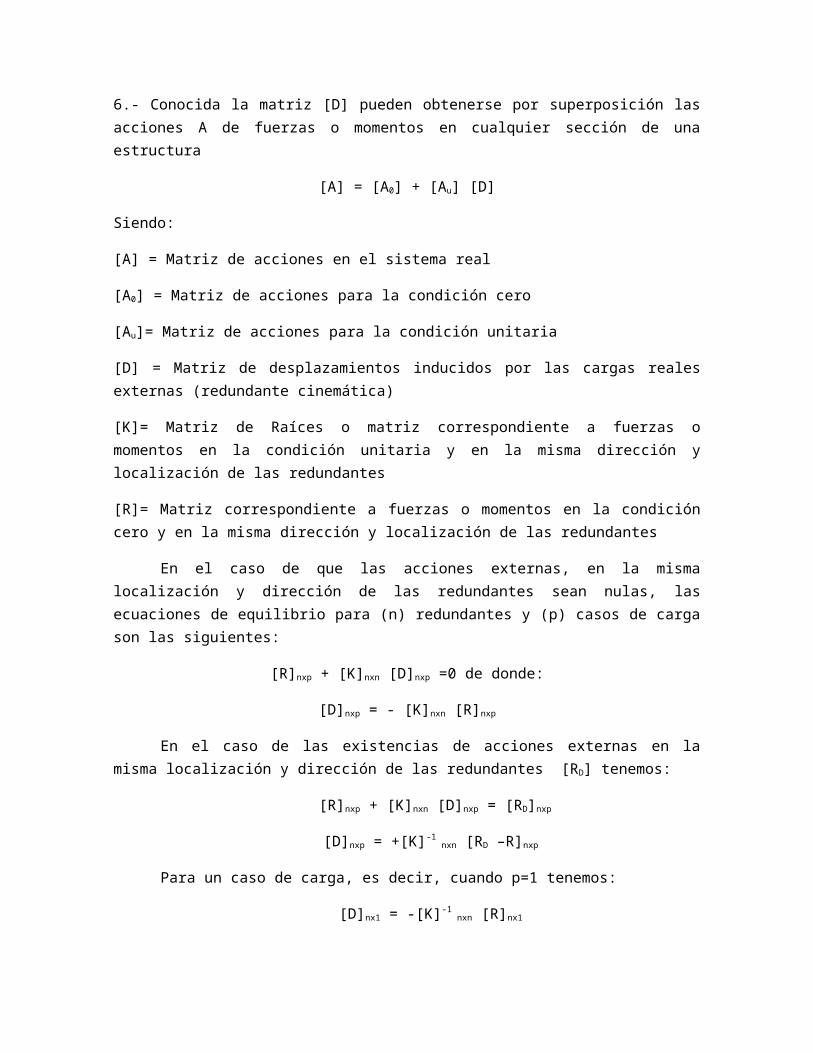
6.- Conocida la matriz [D] pueden obtenerse por superposición las acciones A de fuerzas o momentos en cualquier sección de una estructura
[A] = [A0] + [Au] [D]
Siendo:
[A] = Matriz de acciones en el sistema real
ABL
[A0] = Matriz de acciones para la condición cero
[Au]= Matriz de acciones para la condición unitaria
[D] = Matriz de desplazamientos inducidos por las cargas reales externas (redundante cinemática)
[K]= Matriz de Raíces o matriz correspondiente a fuerzas o momentos en la condición unitaria y en la misma dirección y localización de las redundantes
[R]= Matriz correspondiente a fuerzas o momentos en la condición cero y en la misma dirección y localización de las redundantes
En el caso de que las acciones externas, en la misma localización y dirección de las redundantes sean nulas, las ecuaciones de equilibrio para (n) redundantes y (p) casos de carga son las siguientes:
[R]nxp + [K]nxn [D]nxp =0 de donde:
[D]nxp = - [K]nxn [R]nxp
En el caso de las existencias de acciones externas en la misma localización y dirección de las redundantes [RD] tenemos:
[R]nxp + [K]nxn [D]nxp = [RD]nxp
[D]nxp = +[K]-1 nxn [RD –R]nxp
Para un caso de carga, es decir, cuando p=1 tenemos:
[D]nx1 = -[K]-1 nxn [R]nx1
[D] nx1 = [K]-1 nxn [RD –R]nx1
Consideremos el caso de una viga empotrada en (A) y apoyada en (B) de longitud (L) y sometida a la acción de una carga uniformemente distribuida (w).
La viga es cinematicamente indeterminada de 1er grado, si se desprecia la deformación axial, por cuanto el único desplazamiento posible será el de la rotación en el apoyo B
Estructura Real
A B
w D
A B
w
Estructura Primaria
MB= wL2/12
Condición Cero
K= 4EI /L
Figura K
La figura de la condición cero representa una estructura cinematicamente determinada donde los desplazamientos son nulos. Si sobre esa viga actúa una carga uniformemente distribuida, existe un par de momento MB desarrollado en el apoyo B cuyo valor es el siguiente:
MB= wL2/12 sentido horario
El valor de momento (MB) fue tomado de la tabla N°1
Las condiciones unitarias para este caso están representadas en la “figura k”, donde al darle un desplazamiento unitario a la rotación en el apoyo B, obtenemos un valor de momento llamado coeficiente de rigidez K cuyo valor se encuentra en la tabla N°2, en este caso con un valor de: (4EI/L )Siendo “I” el momento de inercia y “E” el modulo de elasticidad
Siendo el momento flector en el apoyo B nulo, la ecuación de equilibrio estatico en el mismo apoyo B será:
Σ MB = 0
w L2
12+ 4 EIL. D=0
de donde D = -wL3/48EI
D = θB = -wL3/48EI

MARVARVB
= + =
Si ahora se desea calcular el resto de las incógnitas como: MA , RVA , y RVB sencillamente aplicamos la formula de acciones:
[A] = [A0] + [Au] [D]
Para comprender mejor este método es necesario definir la rigidez (K) la cual puede ser angular, lineal o al cortante.
Rigidez Angular Se llama rigidez angular al momento necesario en el extremo apoyado, para producir una
rotación unitaria en este extremo permaneciendo el otro empotrado.
Rigidez Lineal La rigidez lineal de la viga es el momento necesario en el extremo empotrado, para
producir un desplazamiento vertical unitario en este extremo permaneciendo fijo el otro.
Rigidez al Cortante La rigidez al cortante es la fuerza necesaria para producir un desplazamiento unitario
perpendicular al eje de la barra en el extremo empotrado, permaneciendo el otro sin desplazarse.
Limitaciones de la matriz de rigidez
El ensamble de la matriz de rigidez se lleva a cabo a partir de ciertas hipótesis que es importante tener en cuenta:
Material perfectamente elástico, que cumple la ley de Hooke (relación lineal esfuerzo-deformación).
Deformaciones pequeñas: implica que no se tienen en cuenta efectos de segundo orden.

Se desprecian las fuerzas axiales en la flexión. Para aplicar el Principio de Superposición es necesario que se cumplan las anteriores
suposiciones. Todas las cargas se aplican en forma gradual, y tiene una tasa de aumento tal que todas al
iniciar su aplicación en simultánea, alcancen su máximo al mismo tiempo. Se omiten las deformaciones por cortante. No se considera la rigidez de los nodos. No hay pandeo por efecto de carga axial ni por torsión. Los planos XY y YZ son los principales de la flexión y en ellos actúan las cargas. El centro de cortante y el centro de torsión se asume que coinciden, de allí que la flexión y
la torsión sean independientes. El elemento estructural tiene sus dos extremos restringidos. En el caso de pórticos uno de los planos de simetría debe coincidir con el plano de carga.
Propiedades de la matriz de rigidez
La matriz de rigidez es simétrica (sea una matriz cuadrada de orden n. Se dice que A es simétrica si cumple que AT=A ó que A es anti-simétrica si AT=-A)
La suma de los elementos de cada columna es cero Todos los términos de la diagonal principal son positivos y tienden a ser los mayores
valores de cada una de las filas. Es invertible, es decir, su determinante es distinto de cero. Una matriz de rigidez con
determinante cero da indicios de una estructura inestable.
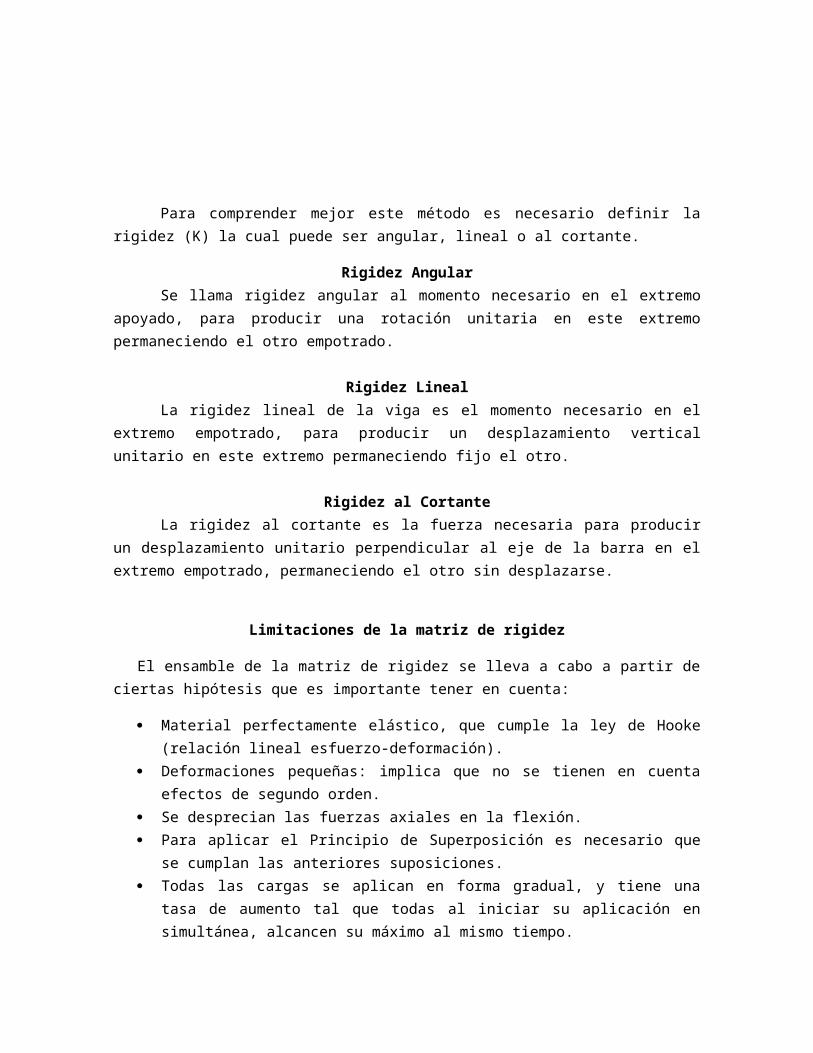
Tabla N°1
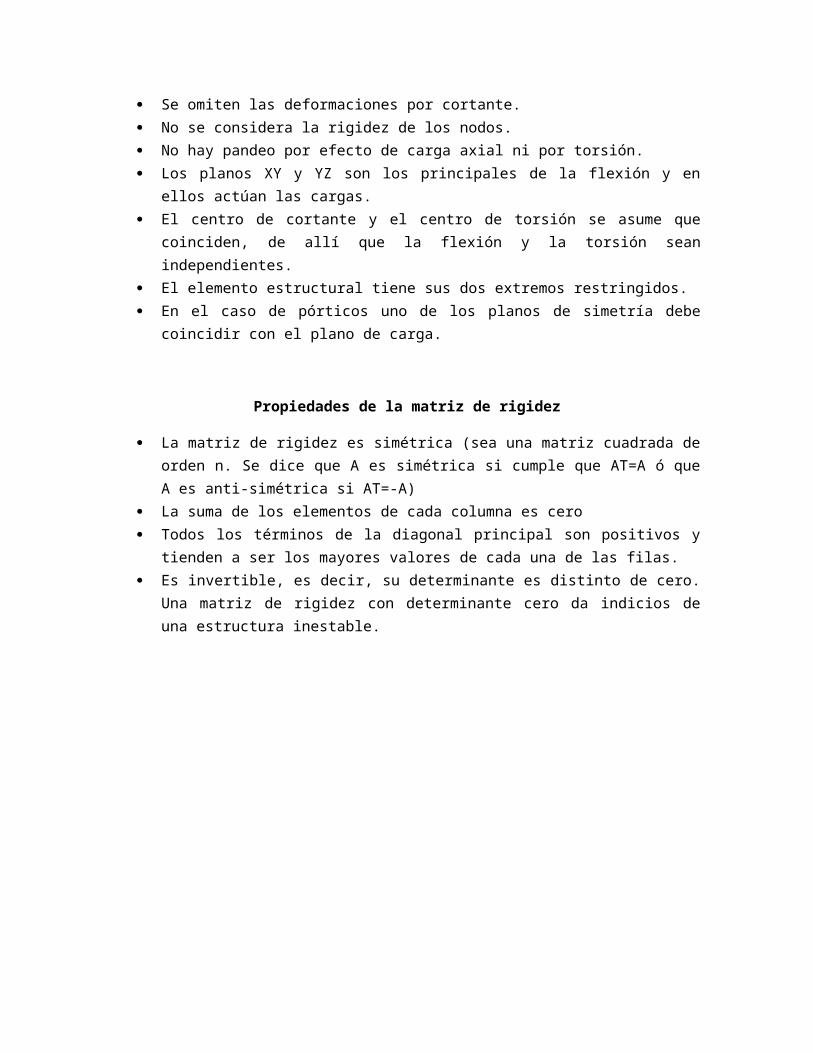
Tabla N°2
Bibliografía
URIBE, Escamilla Jairo. Análisis de estructuras. Segunda edición. Editorial ECOE. Bogotá. Año 2000.
KASSIMALI, Aslam. Análisis Estructuras. Editorial Thompson. Segunda Edición.2004.
McCORMAC, Jack. Análisis de estructuras. Editorial Alfaomega. Primera edición.1999
ROCHEL, Awad Roberto. Análisis matricial de estructuras. Texto editado por la Universidad EAFIT en el año de 1993.
SCHEUREN DE GIL, Ana. Estructuras . Universidad de los Andes Venezuela . Tercera edición. 2011