arduinoshws.cc.oita-u.ac.jp/shibata/arduinotext.pdf1 マイコンで遊ぼう! 2018.7.9,17...
TRANSCRIPT
1
マイコンで遊ぼう! 2018.7.9,17大分大学理工学部 創生工学科
電気電子コース
「電気電子って面白い! 何か大事そう!」を実感するため,
マイコン(小型コンピュータ)を使って遊んでみましょう。
今回使うマイコンは Arduino(アルディーノ)
右の写真のような手のひらサイズのものです。
安価で簡単。たくさんの人がいろいろなものを作って動かしています。
→ ネットで検索すれば,参考になるページがいっぱい出て来ます。
マイコンは,家電とかロボットとかいろいろなものに入っていて,下の図のように,センサの信号を読ん
で状況を把握し,状況に合った動作をするようモータ等に指示を出します。「自動化」には欠かせません。
センサの信号をどう使って,モータをどう動かすかは,皆さんがプログラム(スケッチ)を書くことによっ
て与え,手軽に書き換えることもできます。
1.事前準備(ソフトウエアのインストール)(初回の講義までに,この項目を終わらせておいて下さい)
Arduino を使う前に,まずPCでその準備(インストール)をします。使用しているコンピュータに
よって違うところもありますので,うまく動かないとかわからないところがあったら聞きに来て下さい。
(1) Edge,InternetExplorerやFirefox,Mac の場合は Safari 等のインターネットブラウザを起動し,
https://www.arduino.cc/en/Main/Softwareへアクセス。
(2) 英語のページですが,右下のような DownloadtheArduinoIDE を探す。
(3) その下の右側のところに,Windowsや
MacOSXなどの OS の名前が出ています。
ここから,自分が使っている OS に該当す
る場所(多くの場合は,Windows
Installer(赤丸),Mac ユーザは,MacOS
X(オレンジ色の丸))をクリック。
センサ モータマイコン
どんな状態か
どう動くか
プログラムを与える
障害物だ 右に行こう!
2
(4) ContributetotheArduinoSoftware という寄付
に関するページが出てきます。寄付する人
は”Contribute&Download”を,寄付しない人は
“JustDownload”の文字をクリックして,ダウン
ロード開始。
Mac ユーザは,これ以後,下の方に飛んでください。
(5) 実行するか保存するかを聞かれたら,実行を選択。
保存しか出なかったら,保存を選択。
ダウンロード終了後,実行かフォルダを開くかを聞
かれたら,実行を選択。何も聞かれなかったら,保
存したファイルの場所を探し,それをダブルクリッ
クするなどして実行する。
(6) コンピュータへの変更を許可しますかと聞かれた
ら,発行元が確認済みの発行元 ArduinoLLC であ
ることを確認して許可。管理者のパスワードを聞
かれたら入力。
(7) 使用にあたっての同意事項が出て来たら,一通り
見てIAgreeのボタンを押す。
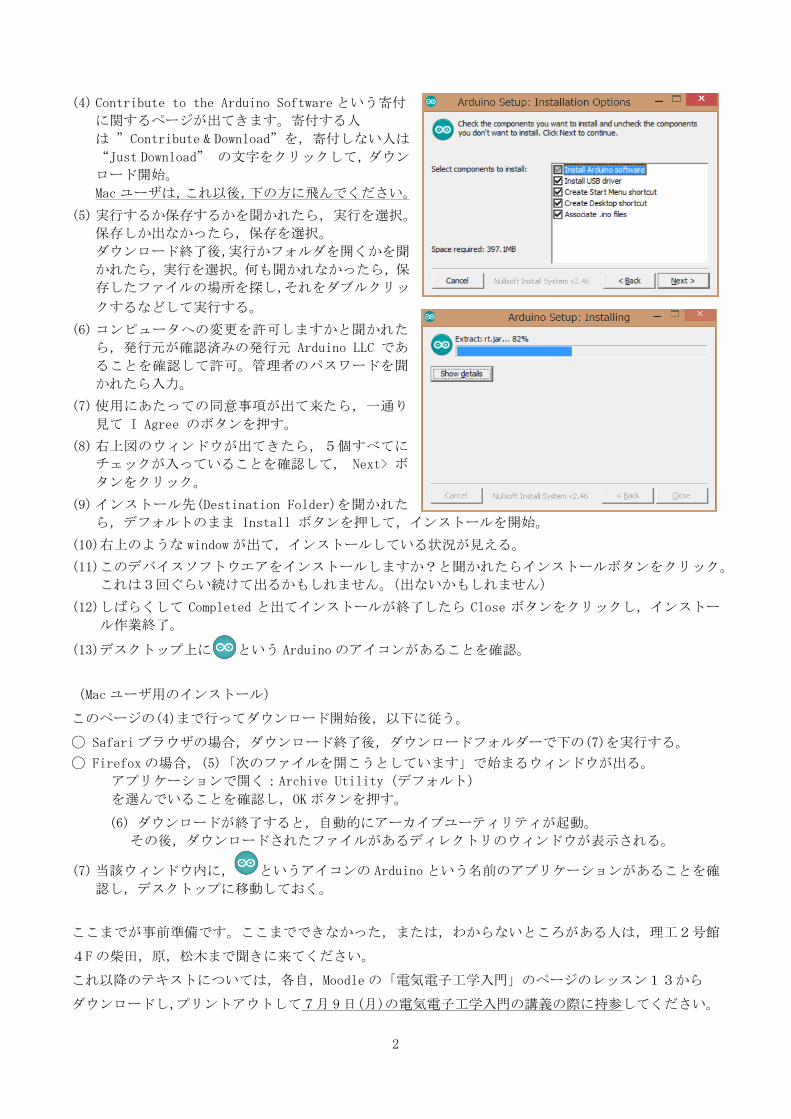
(8) 右上図のウィンドウが出てきたら,5個すべてに
チェックが入っていることを確認して,Next>ボ
タンをクリック。
(9) インストール先(DestinationFolder)を聞かれた
ら,デフォルトのままInstallボタンを押して,インストールを開始。
(10) 右上のような window が出て,インストールしている状況が見える。
(11) このデバイスソフトウエアをインストールしますか?と聞かれたらインストールボタンをクリック。
これは3回ぐらい続けて出るかもしれません。(出ないかもしれません)
(12) しばらくして Completed と出てインストールが終了したら Close ボタンをクリックし,インストー
ル作業終了。
(13) デスクトップ上に という Arduino のアイコンがあることを確認。
(Mac ユーザ用のインストール)
このページの(4)まで行ってダウンロード開始後,以下に従う。
Safari ブラウザの場合,ダウンロード終了後,ダウンロードフォルダーで下の(7)を実行する。
Firefox の場合,(5)「次のファイルを開こうとしています」で始まるウィンドウが出る。
アプリケーションで開く:ArchiveUtility(デフォルト)
を選んでいることを確認し,OK ボタンを押す。
(6)ダウンロードが終了すると,自動的にアーカイブユーティリティが起動。
その後,ダウンロードされたファイルがあるディレクトリのウィンドウが表示される。
(7) 当該ウィンドウ内に, というアイコンの Arduino という名前のアプリケーションがあることを確
認し,デスクトップに移動しておく。
ここまでが事前準備です。ここまでできなかった,または,わからないところがある人は,理工2号館
4F の柴田,原,松木まで聞きに来てください。
これ以降のテキストについては,各自,Moodle の「電気電子工学入門」のページのレッスン13から
ダウンロードし,プリントアウトして7月 9日(月)の電気電子工学入門の講義の際に持参してください。
3
スケッチ(プログラム)を書いてみよう
ここからいよいよ,ArduinoをPCとつないで動かしていきます。
(Arduino や部品等は当日配布します)
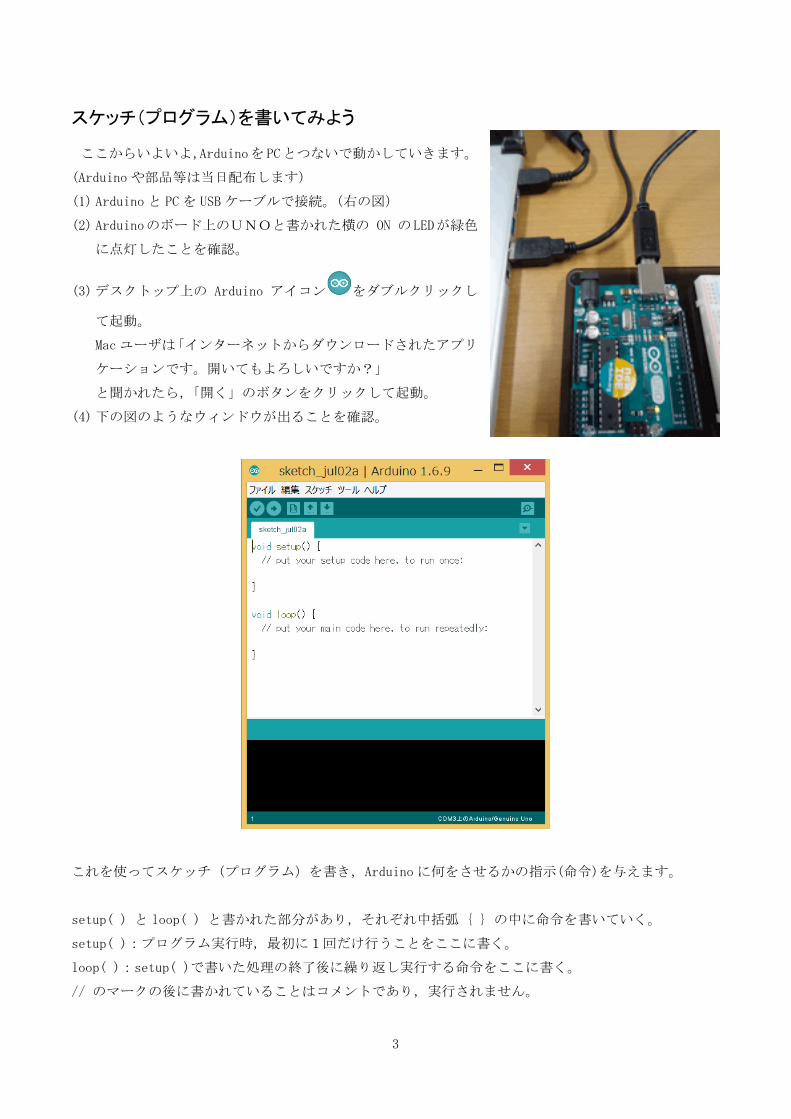
(1) Arduino と PC を USB ケーブルで接続。(右の図)
(2) Arduinoのボード上のUNOと書かれた横のONのLEDが緑色
に点灯したことを確認。
(3) デスクトップ上の Arduino アイコン をダブルクリックし
て起動。
Mac ユーザは「インターネットからダウンロードされたアプリ
ケーションです。開いてもよろしいですか?」
と聞かれたら,「開く」のボタンをクリックして起動。
(4) 下の図のようなウィンドウが出ることを確認。
これを使ってスケッチ(プログラム)を書き,Arduino に何をさせるかの指示(命令)を与えます。
setup()と loop()と書かれた部分があり,それぞれ中括弧の中に命令を書いていく。
setup():プログラム実行時, 初に1回だけ行うことをここに書く。
loop():setup()で書いた処理の終了後に繰り返し実行する命令をここに書く。
//のマークの後に書かれていることはコメントであり,実行されません。
4
まずは Arduino 基板上の LED を光らせてみましょう。
(1)スケッチに,右のようなプログラムを書く。
・半角英数字のモードにする(日本語モードはエラーの元)
・文字の大きさの変更は
ファイルメニュー→環境設定→エディタの文字の大きさ
(2)Ctrl+s キーで名前を付けてスケッチを保存。
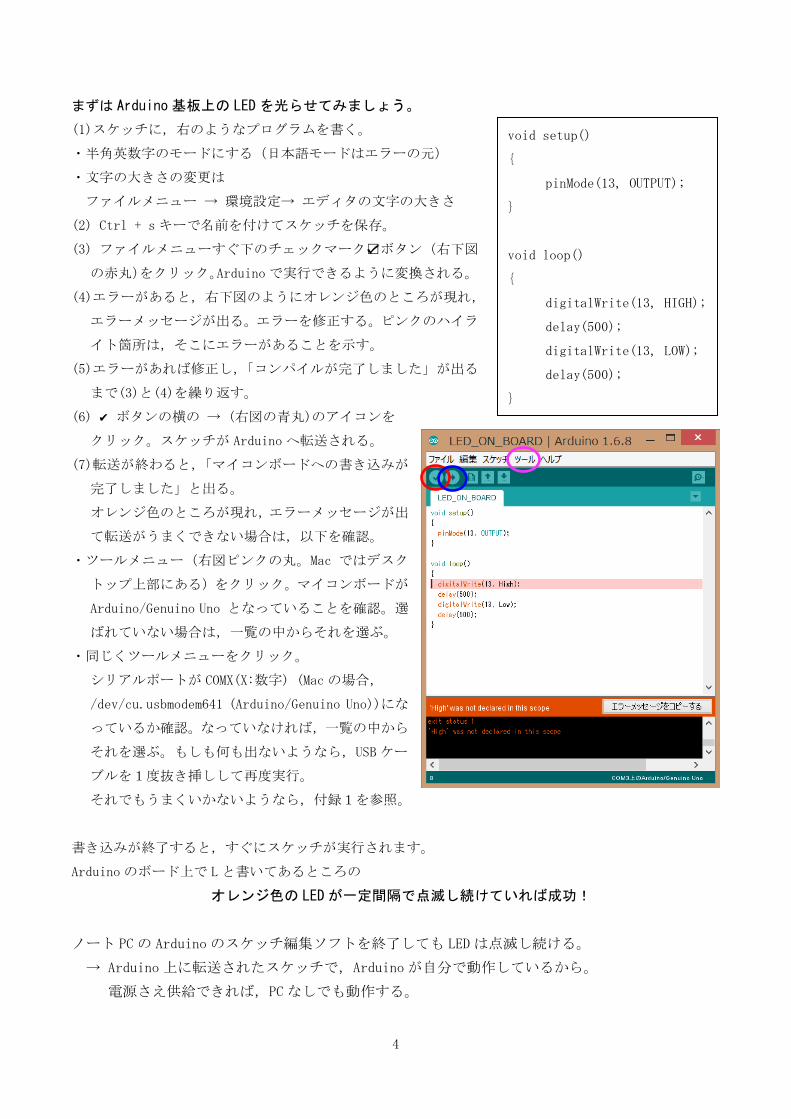
(3)ファイルメニューすぐ下のチェックマーク ボタン(右下図
の赤丸)をクリック。Arduino で実行できるように変換される。
(4)エラーがあると,右下図のようにオレンジ色のところが現れ,
エラーメッセージが出る。エラーを修正する。ピンクのハイラ
イト箇所は,そこにエラーがあることを示す。
(5)エラーがあれば修正し,「コンパイルが完了しました」が出る
まで(3)と(4)を繰り返す。
(6) ボタンの横の→ (右図の青丸)のアイコンを
クリック。スケッチが Arduino へ転送される。
(7)転送が終わると,「マイコンボードへの書き込みが
完了しました」と出る。
オレンジ色のところが現れ,エラーメッセージが出
て転送がうまくできない場合は,以下を確認。
・ツールメニュー(右図ピンクの丸。Mac ではデスク
トップ上部にある)をクリック。マイコンボードが
Arduino/GenuinoUnoとなっていることを確認。選
ばれていない場合は,一覧の中からそれを選ぶ。
・同じくツールメニューをクリック。
シリアルポートが COMX(X:数字)(Mac の場合,
/dev/cu.usbmodem641(Arduino/GenuinoUno))にな
っているか確認。なっていなければ,一覧の中から
それを選ぶ。もしも何も出ないようなら,USB ケー
ブルを1度抜き挿しして再度実行。
それでもうまくいかないようなら,付録1を参照。
書き込みが終了すると,すぐにスケッチが実行されます。
Arduino のボード上で L と書いてあるところの
オレンジ色の LED が一定間隔で点滅し続けていれば成功!
ノート PC の Arduino のスケッチ編集ソフトを終了しても LED は点滅し続ける。
→Arduino 上に転送されたスケッチで,Arduino が自分で動作しているから。
電源さえ供給できれば,PC なしでも動作する。
voidsetup()
pinMode(13,OUTPUT);
voidloop()
digitalWrite(13,HIGH);
delay(500);
digitalWrite(13,LOW);
delay(500);
5
【スケッチを見てみよう】
ここで,スケッチで何をどのように指示していたか確認しておきましょう。
pinMode(13,OUTPUT);
13 番目のピン(信号の出入り口のこと)を,信号の出口(出力)として使うことを設定。
digitalWrite(13,HIGH);
13 番目の信号に,HIGHつまり高い電圧(5V)を出す(書く)。→LED が ON になる。
delay(500);
500msec の間そのまま待つ。
digitalWrite(13,LOW);
13 番目の信号に,LOW つまり低い電圧(0V,GND)を出す。→LED が OFF になる。
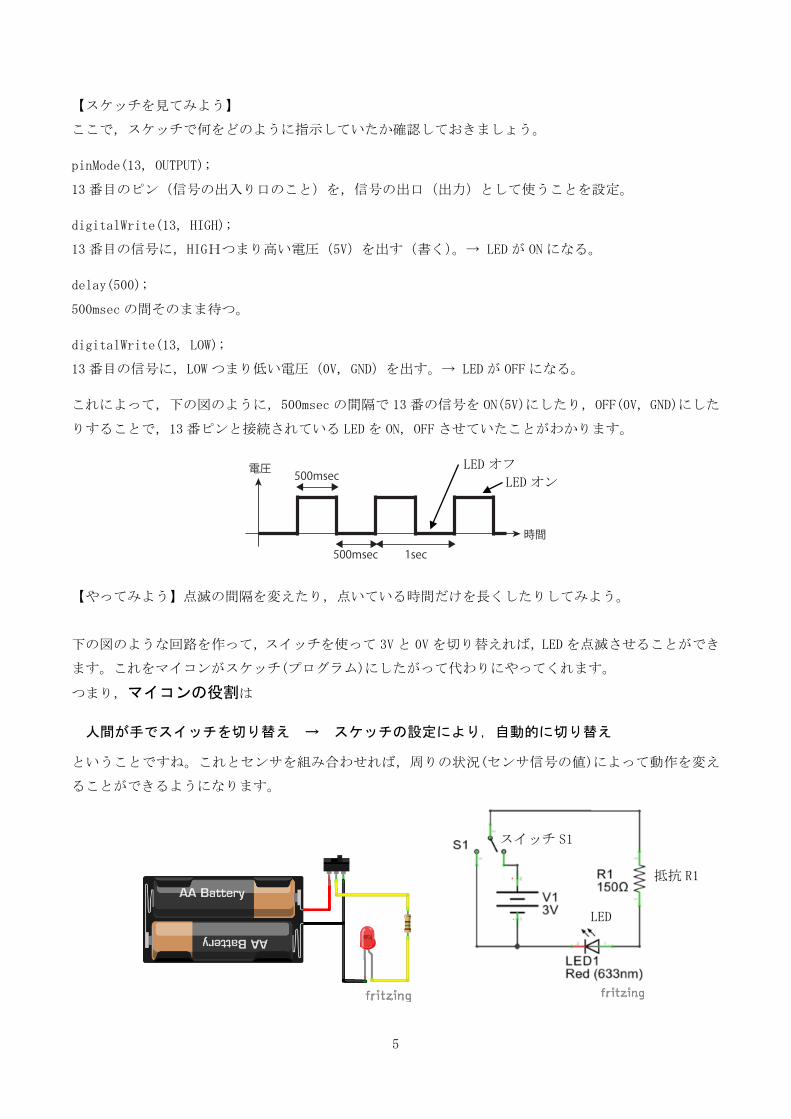
これによって,下の図のように,500msec の間隔で 13 番の信号を ON(5V)にしたり,OFF(0V,GND)にした
りすることで,13 番ピンと接続されている LED を ON,OFF させていたことがわかります。
【やってみよう】点滅の間隔を変えたり,点いている時間だけを長くしたりしてみよう。
下の図のような回路を作って,スイッチを使って 3V と 0V を切り替えれば,LED を点滅させることができ
ます。これをマイコンがスケッチ(プログラム)にしたがって代わりにやってくれます。
つまり,マイコンの役割は
人間が手でスイッチを切り替え → スケッチの設定により,自動的に切り替え
ということですね。これとセンサを組み合わせれば,周りの状況(センサ信号の値)によって動作を変え
ることができるようになります。
電圧
時間
500msec
500msec 1sec
LED オフ
LED オン
スイッチ S1
抵抗 R1
LED

6
3. 外部のものを操作(出力)しよう
〔1〕ブレッドボードの使い方
下の図のようなものをブレッドボードと呼びます。穴と穴が下の図のようにつながっているので,
半田付けをしなくても,穴に素子を差し込むだけで,手軽に回路を作ることができます。
回路を変更するときは,必ずパソコンから USB のケーブルを抜いてください。
また,絶対に5V,3.3V, GND間や(出力設定にした場合には)デジタルの信号線との間も短絡(抵抗
等を介さないで直結)しないよう気をつけてください。実際にパソコンが故障した人がいます!
〔2〕外部の LED を光らせる
自分で作成した回路上の LED を点滅させましょう。
【回路】(右の図を参照)
・LED を図のようにブレッドボードに挿す。
・LED のアノード側(足の長い方)を抵抗と接続
・LED のカソード側(足の短い方)を Arduino 上のピンソケット
(黒い細長いところでたくさんの穴が空いているところ)の GND と書
かれたところと接続。ここが電圧の基準,つまり 0V になる。
(GND はできるだけ黒いワイヤーで配線しましょう)
・抵抗と Arduino 上の黒いピンソケットのうち,DIGITAL ~10
と書かれた穴と接続。どの抵抗を使えば良いかは,付録2参照。
・右のブレッドボードの接続を回路図にすると,右下の図のようになる。
【スケッチ】
基本的には先ほどと同じ。出力のピンを 13 から 10 に変更。
・4ページのスケッチ中の2箇所ある 13 をともに 10 に変更
【実行】
10 番ピンが,5V になったり 0V になったりする(前ページの図)
→LED が点滅することを確認。
縦の穴の列が全部つながっている
横の5つの穴の列がつながっている
電源用に使う
GND用に使う
横の5つの穴の列がつながっている
DIGITAL~10GND
LED
R510Ω

7
〔3〕スピーカーを鳴らす
スピーカーも,Arduino から信号を出して音を出します。
【回路】(右の図を参照)
(1) スピーカーを Arduino に接続
(ブレッドボードを介しても構いません)
赤いワイヤー:DIGITAL10 番ピン
黒いワイヤー:GND(0V)
【スケッチ】
(1)前と同じスケッチを使って出力してみましょう。
何かプチプチ音が聞こえると思います。
(2) スケッチ中の delay の括弧の中の数値をたとえば 10 や 1 と小さくしていく。
どうなったでしょうか?
だんだん音らしくなり,さらにその音が高くなったでしょうか?
上の図のように,
delay を小さくする→周期が小さくなる(周波数が大きくなる)→高い音が出る(下の表参照)
となります。msec 単位で細かく周期を変えたい場合は,delay()の代わりに delayMicroseconds()を
使います。
tone(10, freq)という関数を使い,freq に周波数(整数のみ)を直接入れれば,これ1つで音を出せます。
音階 周波数 (Hz)
周期 (msec)
周波数 (Hz)
周期 (msec)
周波数 (Hz)
周期 (msec)
周波数 (Hz)
周期 (msec)
周波数 (Hz)
周期 (msec)
ド 130.815 7644 261.63 3822 261.63 3822 261.63 3822 2093 478 レ 146.835 6810 293.67 3405 293.67 3405 293.67 3405 2349.4 426 ミ 164.82 6067 329.63 3034 329.63 3034 329.63 3034 2637.2 379
ファ 174.62 5727 349.23 2863 349.23 2863 349.23 2863 2794.2 358 ソ 196 5102 392 2551 392 2551 392 2551 3135.92 319 ラ 220 4545 440 2273 440 2273 440 2273 3519.96 284 シ 246.94 4050 493.88 2025 493.88 2025 493.88 2025 3951 253
電圧
時間
delay
delay delay x 2周期
8
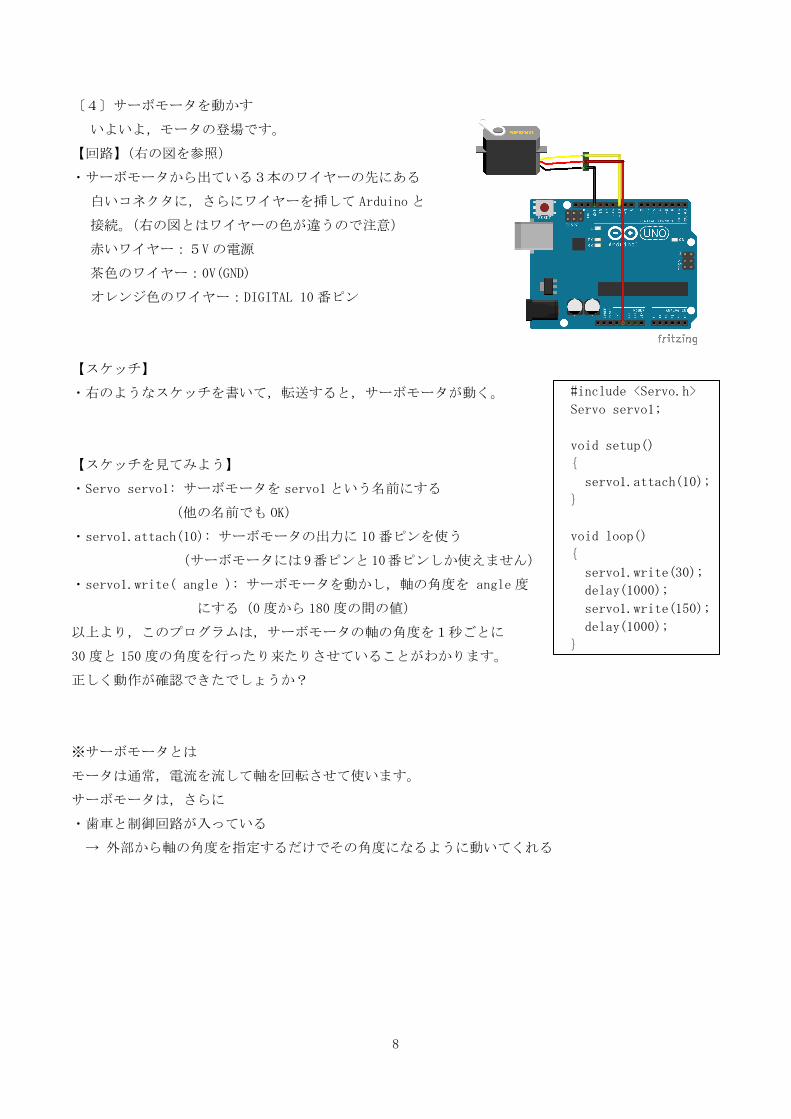
〔4〕サーボモータを動かす
いよいよ,モータの登場です。
【回路】(右の図を参照)
・サーボモータから出ている3本のワイヤーの先にある
白いコネクタに,さらにワイヤーを挿して Arduino と
接続。(右の図とはワイヤーの色が違うので注意)
赤いワイヤー:5V の電源
茶色のワイヤー:0V(GND)
オレンジ色のワイヤー:DIGITAL10 番ピン
【スケッチ】
・右のようなスケッチを書いて,転送すると,サーボモータが動く。
【スケッチを見てみよう】
・Servoservo1:サーボモータを servo1 という名前にする
(他の名前でも OK)
・servo1.attach(10):サーボモータの出力に 10 番ピンを使う
(サーボモータには9番ピンと10番ピンしか使えません)
・servo1.write(angle):サーボモータを動かし,軸の角度をangle 度
にする(0 度から 180 度の間の値)
以上より,このプログラムは,サーボモータの軸の角度を1秒ごとに
30 度と 150 度の角度を行ったり来たりさせていることがわかります。
正しく動作が確認できたでしょうか?
※サーボモータとは
モータは通常,電流を流して軸を回転させて使います。
サーボモータは,さらに
・歯車と制御回路が入っている
→外部から軸の角度を指定するだけでその角度になるように動いてくれる
#include<Servo.h>
Servoservo1;
voidsetup()
servo1.attach(10);
voidloop()
servo1.write(30);
delay(1000);
servo1.write(150);
delay(1000);
9
4. PC と通信しよう Arduino と PC との間で信号のやり取りをすることで
・PC から Arduino が搭載された機器を制御
・機器の状態を PC 側で知る
ことができるようになります。
ここでは,USB を使って Arduino→PC への通信を行います。
【回路】特に作成する必要なし
【スケッチ】 右下のようなスケッチを書いて,Arduino に転送。
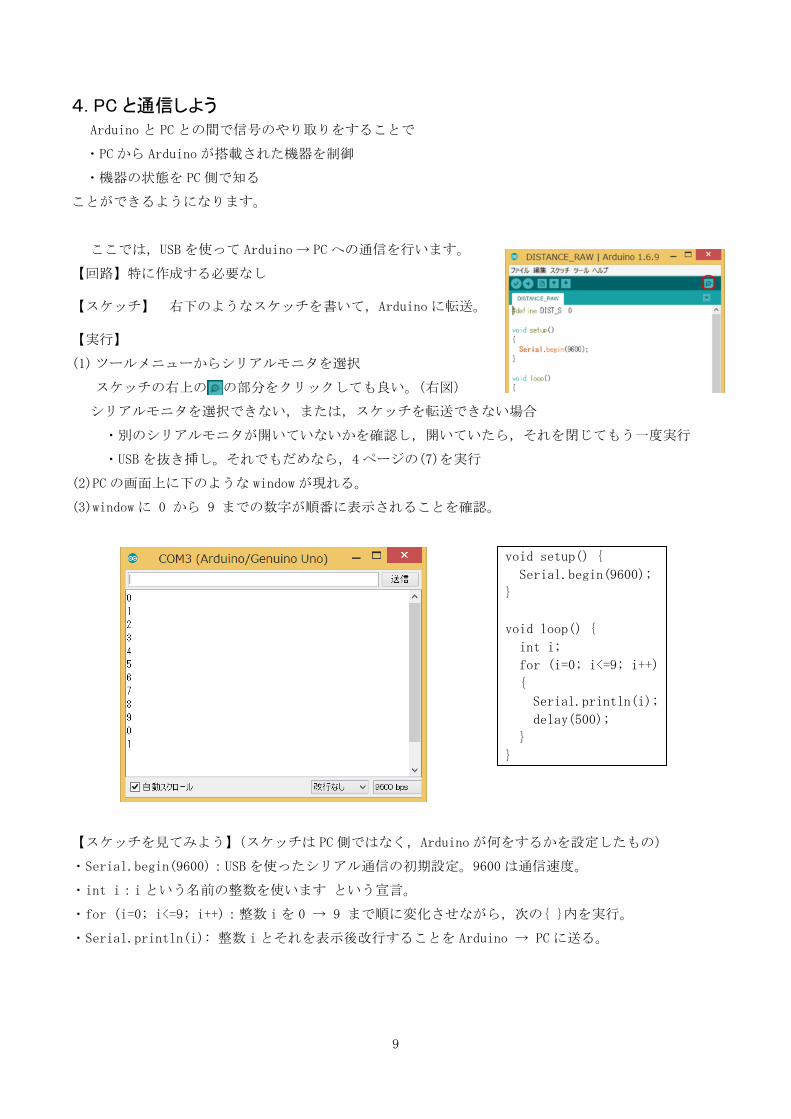
【実行】
(1) ツールメニューからシリアルモニタを選択
スケッチの右上の の部分をクリックしても良い。(右図)
シリアルモニタを選択できない,または,スケッチを転送できない場合
・別のシリアルモニタが開いていないかを確認し,開いていたら,それを閉じてもう一度実行
・USB を抜き挿し。それでもだめなら,4 ページの(7)を実行
(2)PC の画面上に下のような window が現れる。
(3)window に0から9までの数字が順番に表示されることを確認。
【スケッチを見てみよう】(スケッチは PC 側ではなく,Arduino が何をするかを設定したもの)
・Serial.begin(9600):USB を使ったシリアル通信の初期設定。9600 は通信速度。
・inti:i という名前の整数を使いますという宣言。
・for(i=0;i<=9;i++):整数 i を 0→9まで順に変化させながら,次の内を実行。
・Serial.println(i):整数 i とそれを表示後改行することを Arduino→PC に送る。
voidsetup()
Serial.begin(9600);
voidloop()
inti;
for(i=0;i<=9;i++)
Serial.println(i);
delay(500);
10
5. センサを使ってまわりの状況(入力)を知ろう
エアコン:温度が高い→もっと冷やそう→モータを回す
ロボット:障害物がある→避けて通る
のように,状況に応じた行動を取るためには,まずまわりの状況を知る必要があります。
そのため,下の図のように,センサ信号をマイコンが理解できるように,
A/D 変換:アナログ(Analog)信号→ディジタル(Digital)信号 をする必要があります。
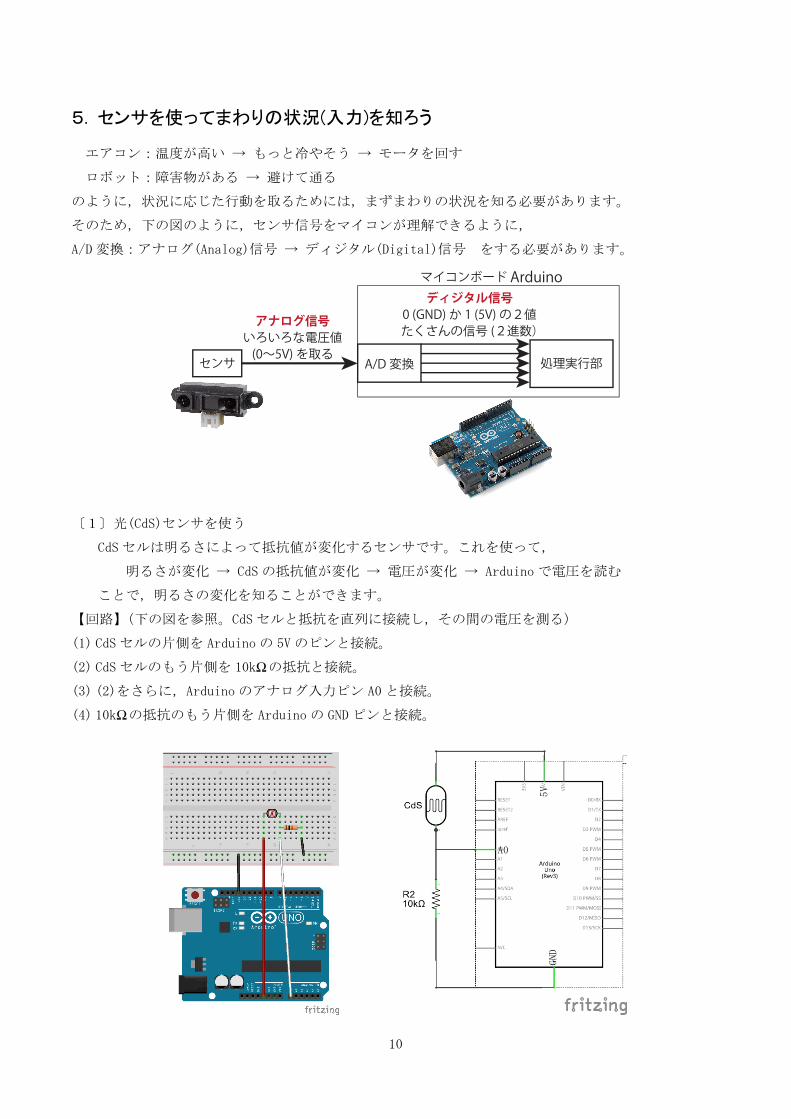
〔1〕光(CdS)センサを使う
CdS セルは明るさによって抵抗値が変化するセンサです。これを使って,
明るさが変化→CdS の抵抗値が変化→電圧が変化→Arduino で電圧を読む
ことで,明るさの変化を知ることができます。
【回路】(下の図を参照。CdS セルと抵抗を直列に接続し,その間の電圧を測る)
(1) CdS セルの片側を Arduino の 5V のピンと接続。
(2) CdS セルのもう片側を 10kΩ の抵抗と接続。
(3) (2)をさらに,Arduino のアナログ入力ピン A0 と接続。
(4) 10kΩ の抵抗のもう片側を Arduino の GND ピンと接続。
処理実行部センサ
アナログ信号いろいろな電圧値(0~5V) を取る
ディジタル信号0 (GND) か 1 (5V) の2値たくさんの信号 (2進数)
A/D 変換
マイコンボード Arduino
5V
A0
GND
11
【スケッチ】
右のようなスケッチを書き,Arduino に転送。
【実行】
・前ページと同様,ツールメニューからシリアルモニタを起動
・数値が表示されることを確認。
・手をかざして暗くすると値が小さくなることを確認。
【問題】下線部を埋めなさい。
暗くなる→CdS の抵抗値が くなる→A0 の電圧が低くなる
(アナログ入力端子にはほとんど電流は流れない)
【スケッチを見てみよう】
・data=analogRead(0):A0 のアナログ入力を読んで整数(int)の data という変数に入れる。
A1 から入力する場合は,0 を 1 に換える。
・Serial.println(data):整数 data に入っている値を PC に送ってその値を表示後,改行させる。
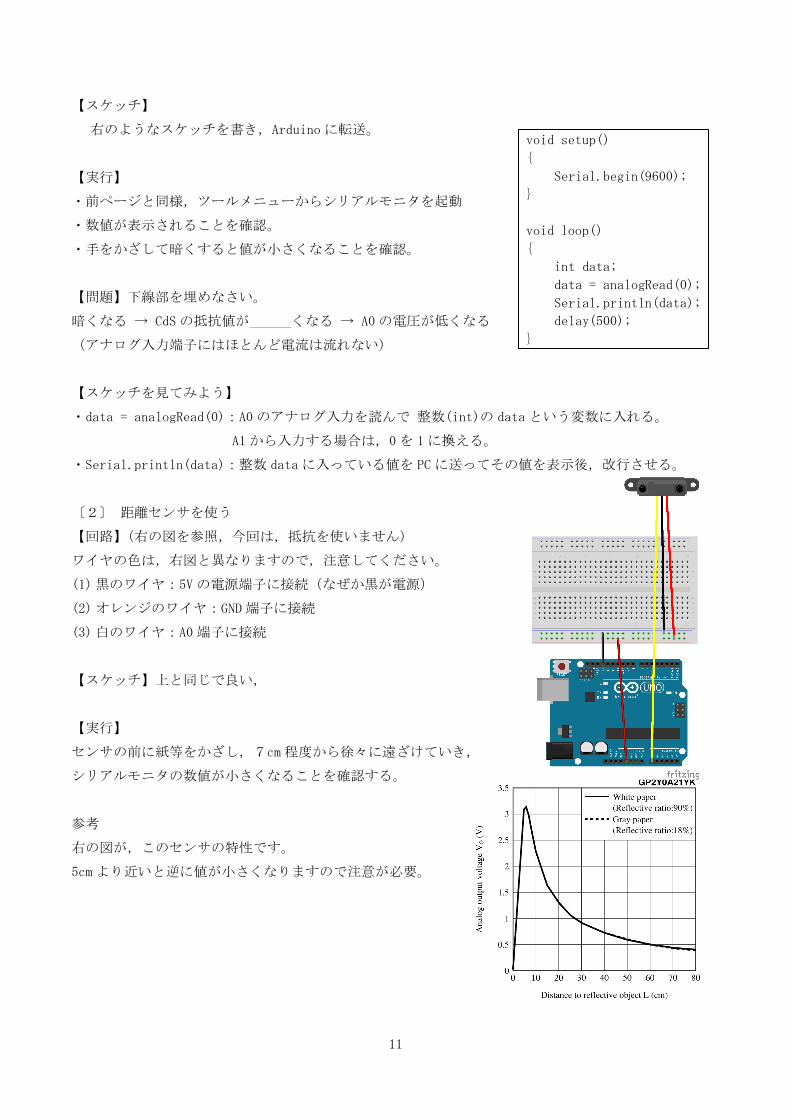
〔2〕距離センサを使う
【回路】(右の図を参照,今回は,抵抗を使いません)
ワイヤの色は,右図と異なりますので,注意してください。
(1) 黒のワイヤ:5V の電源端子に接続(なぜか黒が電源)
(2) オレンジのワイヤ:GND 端子に接続
(3) 白のワイヤ:A0 端子に接続
【スケッチ】上と同じで良い,
【実行】
センサの前に紙等をかざし,7cm 程度から徐々に遠ざけていき,
シリアルモニタの数値が小さくなることを確認する。
参考
右の図が,このセンサの特性です。
5cm より近いと逆に値が小さくなりますので注意が必要。
voidsetup()
Serial.begin(9600);
voidloop()
intdata;
data=analogRead(0);
Serial.println(data);
delay(500);
12
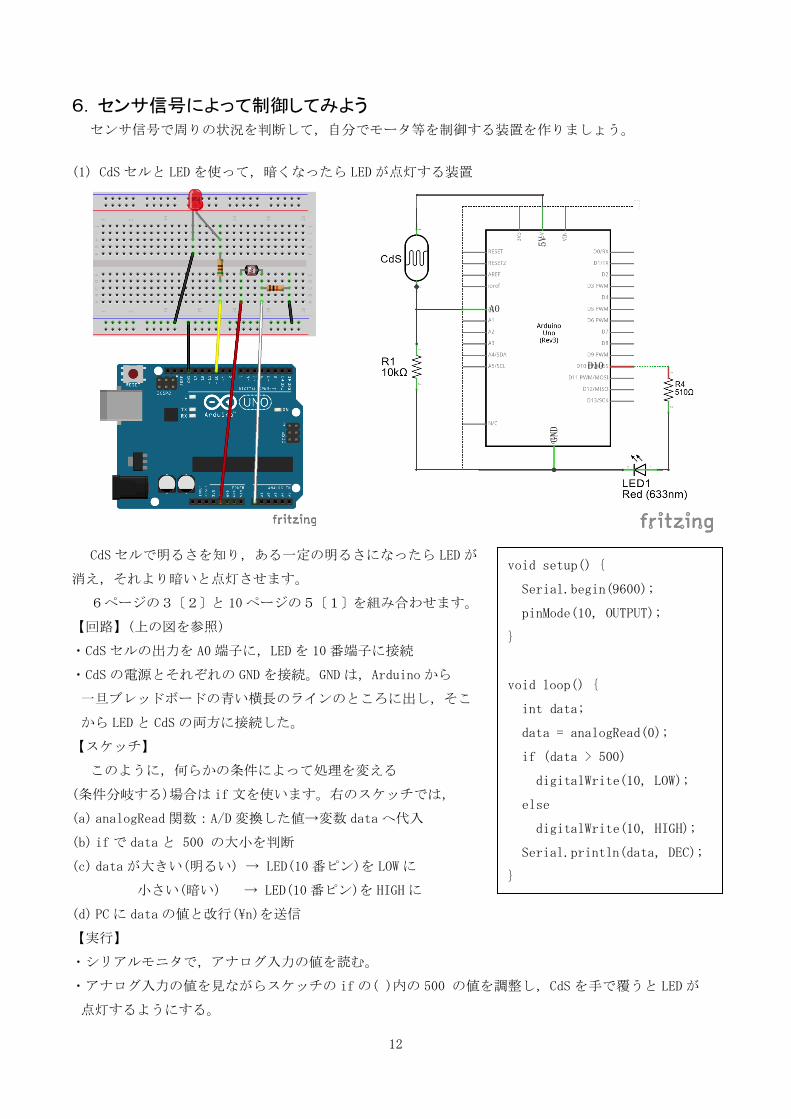
6. センサ信号によって制御してみよう
センサ信号で周りの状況を判断して,自分でモータ等を制御する装置を作りましょう。
(1)CdS セルと LED を使って,暗くなったら LED が点灯する装置
CdS セルで明るさを知り,ある一定の明るさになったら LED が
消え,それより暗いと点灯させます。
6ページの3〔2〕と 10 ページの5〔1〕を組み合わせます。
【回路】(上の図を参照)
・CdS セルの出力を A0 端子に,LED を 10 番端子に接続
・CdS の電源とそれぞれの GND を接続。GND は,Arduino から
一旦ブレッドボードの青い横長のラインのところに出し,そこ
から LED と CdS の両方に接続した。
【スケッチ】
このように,何らかの条件によって処理を変える
(条件分岐する)場合は if 文を使います。右のスケッチでは,
(a) analogRead 関数:A/D 変換した値→変数 data へ代入
(b) if で data と500の大小を判断
(c) data が大きい(明るい)→LED(10 番ピン)を LOW に
小さい(暗い) →LED(10 番ピン)を HIGH に
(d) PC に data の値と改行(¥n)を送信
【実行】
・シリアルモニタで,アナログ入力の値を読む。
・アナログ入力の値を見ながらスケッチの if の()内の 500の値を調整し,CdS を手で覆うと LED が
点灯するようにする。
voidsetup()
Serial.begin(9600);
pinMode(10,OUTPUT);
voidloop()
intdata;
data=analogRead(0);
if(data>500)
digitalWrite(10,LOW);
else
digitalWrite(10,HIGH);
Serial.println(data,DEC);
5V
A0
GND
D10
13
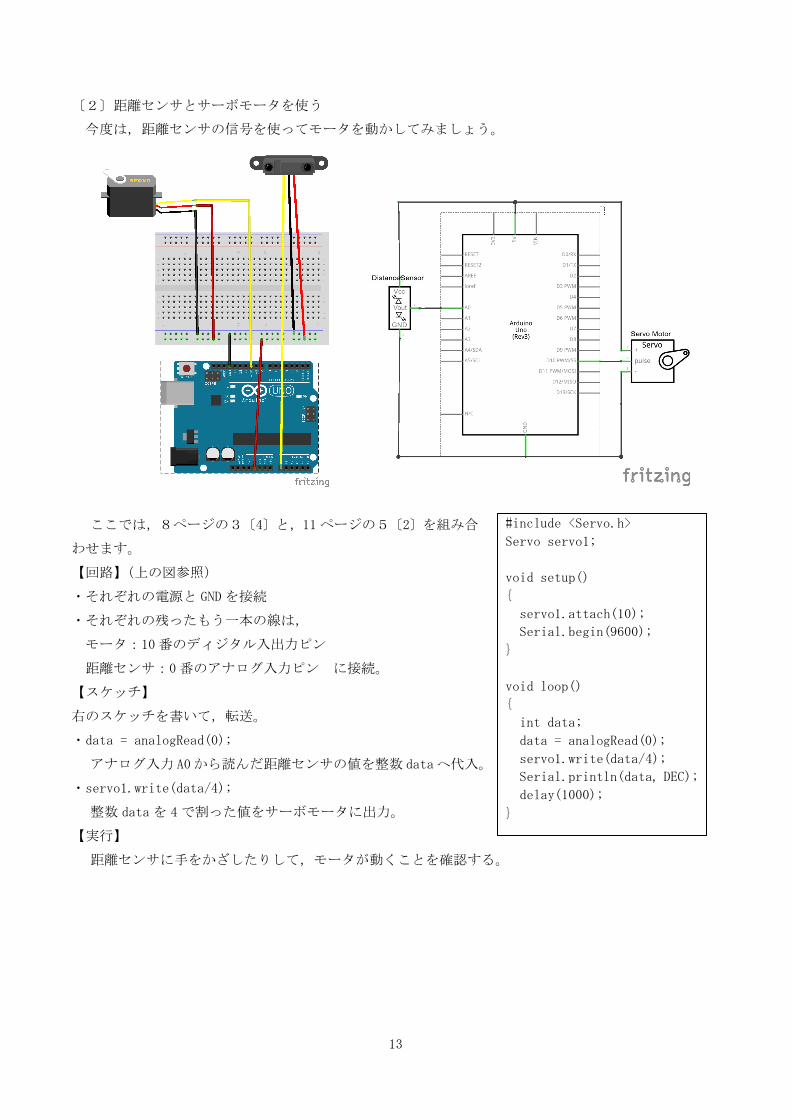
〔2〕距離センサとサーボモータを使う
今度は,距離センサの信号を使ってモータを動かしてみましょう。
ここでは,8ページの3〔4〕と,11 ページの5〔2〕を組み合
わせます。
【回路】(上の図参照)
・それぞれの電源と GND を接続
・それぞれの残ったもう一本の線は,
モータ:10 番のディジタル入出力ピン
距離センサ:0 番のアナログ入力ピン に接続。
【スケッチ】
右のスケッチを書いて,転送。
・data=analogRead(0);
アナログ入力A0から読んだ距離センサの値を整数dataへ代入。
・servo1.write(data/4);
整数 data を 4 で割った値をサーボモータに出力。
【実行】
距離センサに手をかざしたりして,モータが動くことを確認する。
#include<Servo.h>
Servoservo1;
voidsetup()
servo1.attach(10);
Serial.begin(9600);
voidloop()
intdata;
data=analogRead(0);
servo1.write(data/4);
Serial.println(data,DEC);
delay(1000);
14
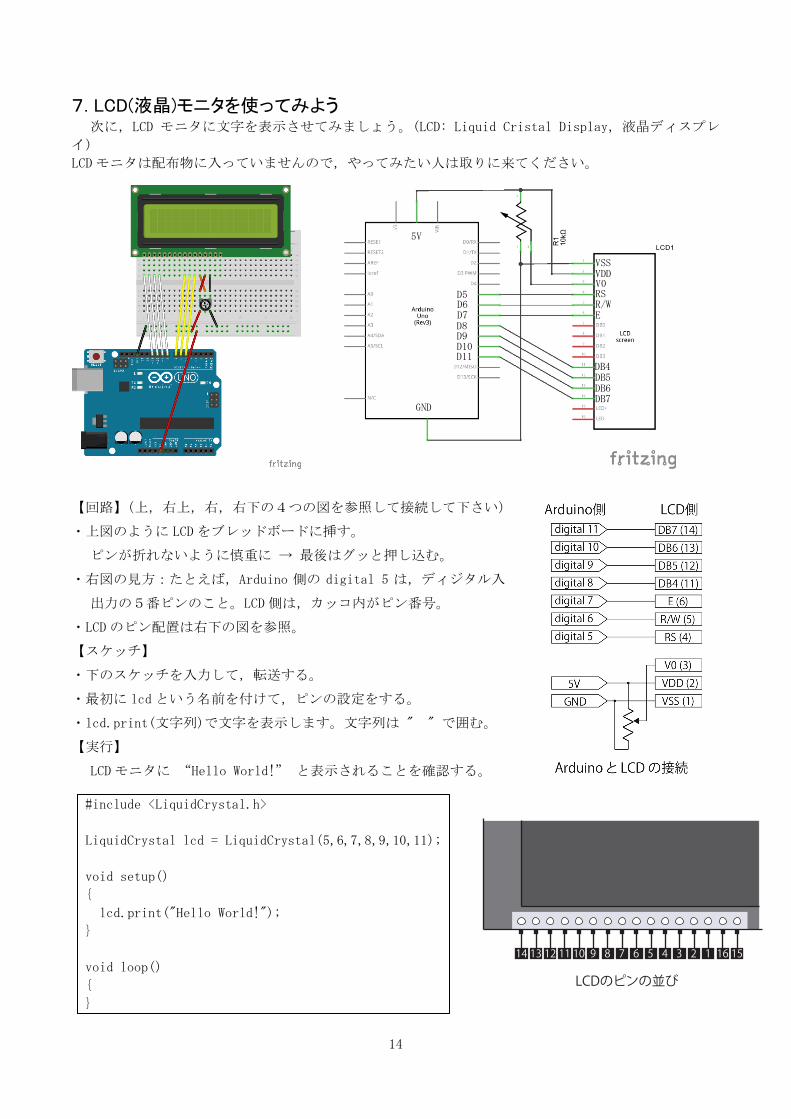
7. LCD(液晶)モニタを使ってみよう
次に,LCD モニタに文字を表示させてみましょう。(LCD:LiquidCristalDisplay,液晶ディスプレ
イ)
LCD モニタは配布物に入っていませんので,やってみたい人は取りに来てください。
【回路】(上,右上,右,右下の4つの図を参照して接続して下さい)
・上図のように LCD をブレッドボードに挿す。
ピンが折れないように慎重に→ 後はグッと押し込む。
・右図の見方:たとえば,Arduino 側の digital5 は,ディジタル入
出力の5番ピンのこと。LCD 側は,カッコ内がピン番号。
・LCD のピン配置は右下の図を参照。
【スケッチ】
・下のスケッチを入力して,転送する。
・ 初に lcd という名前を付けて,ピンの設定をする。
・lcd.print(文字列)で文字を表示します。文字列は""で囲む。
【実行】
LCD モニタに“HelloWorld!”と表示されることを確認する。
14 13 12 11 10 9 8 7 6 5 4 3 2 1 16 15
LCDのピンの並び
#include<LiquidCrystal.h>
LiquidCrystallcd=LiquidCrystal(5,6,7,8,9,10,11);
voidsetup()
lcd.print("HelloWorld!");
voidloop()
D5D6
D8D9
D11
D7
D10
GND
5V
VSSVDDV0RSR/WE
DB4DB5DB6DB7
15
付録1
USB 接続の確認方法
PC に USB ケーブルを挿した状態で,以下を実行してください。
手順1
まず,コントロールパネルを立ち上げます。起動方法は OS ごとに異なり,以下のようになります。
(他の方法でも OK です)途中で管理者のパスワードを求められることがあったら,入力してください。
・Windows7
スタートボタン→右の列のコントロールパネルをクリック
・Windows8 と 10
左下のスタートボタンを右クリック→コントロールパネル
手順2
・Windows7と8
ハードウエアとサウンド→デバイスとプリンタのところにあるデバイスマネージャーをクリック
・Windows10
システムとセキュリティ→システムの下のデバイスマネージャーをクリック
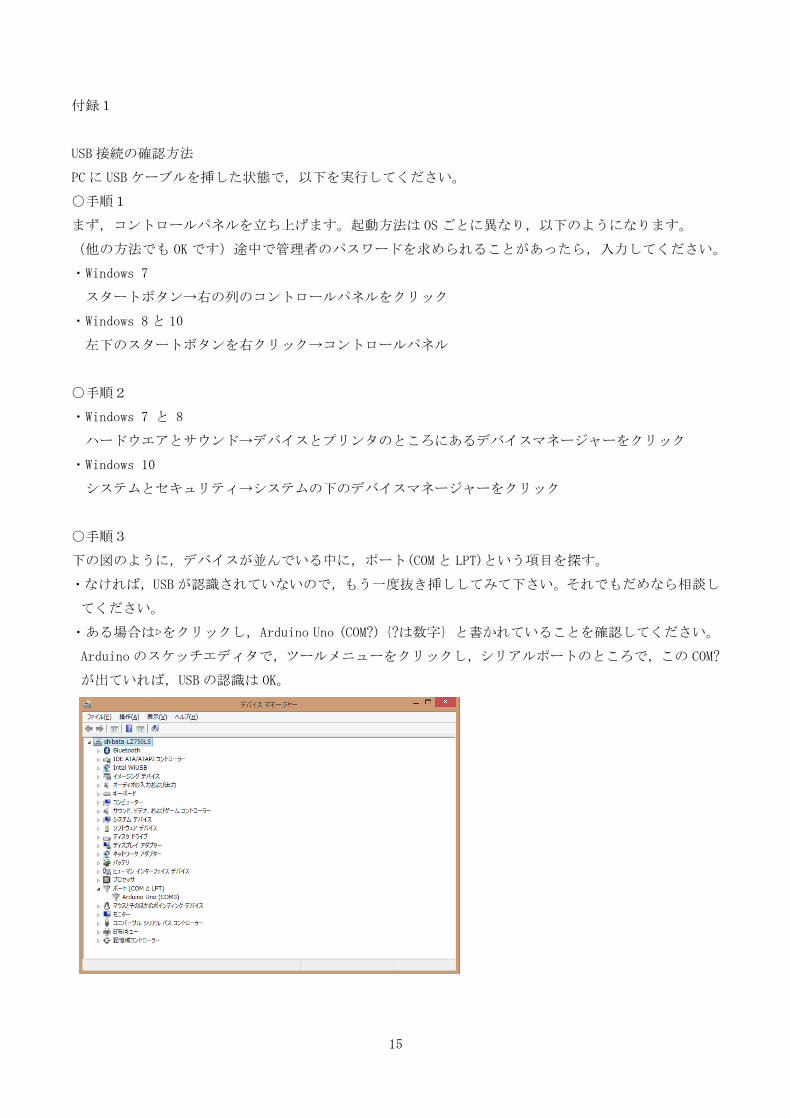
手順3
下の図のように,デバイスが並んでいる中に,ポート(COM と LPT)という項目を探す。
・なければ,USB が認識されていないので,もう一度抜き挿ししてみて下さい。それでもだめなら相談し
てください。
・ある場合は▷をクリックし,ArduinoUno(COM?)?は数字と書かれていることを確認してください。
Arduino のスケッチエディタで,ツールメニューをクリックし,シリアルポートのところで,この COM?
が出ていれば,USB の認識は OK。
16
付録2
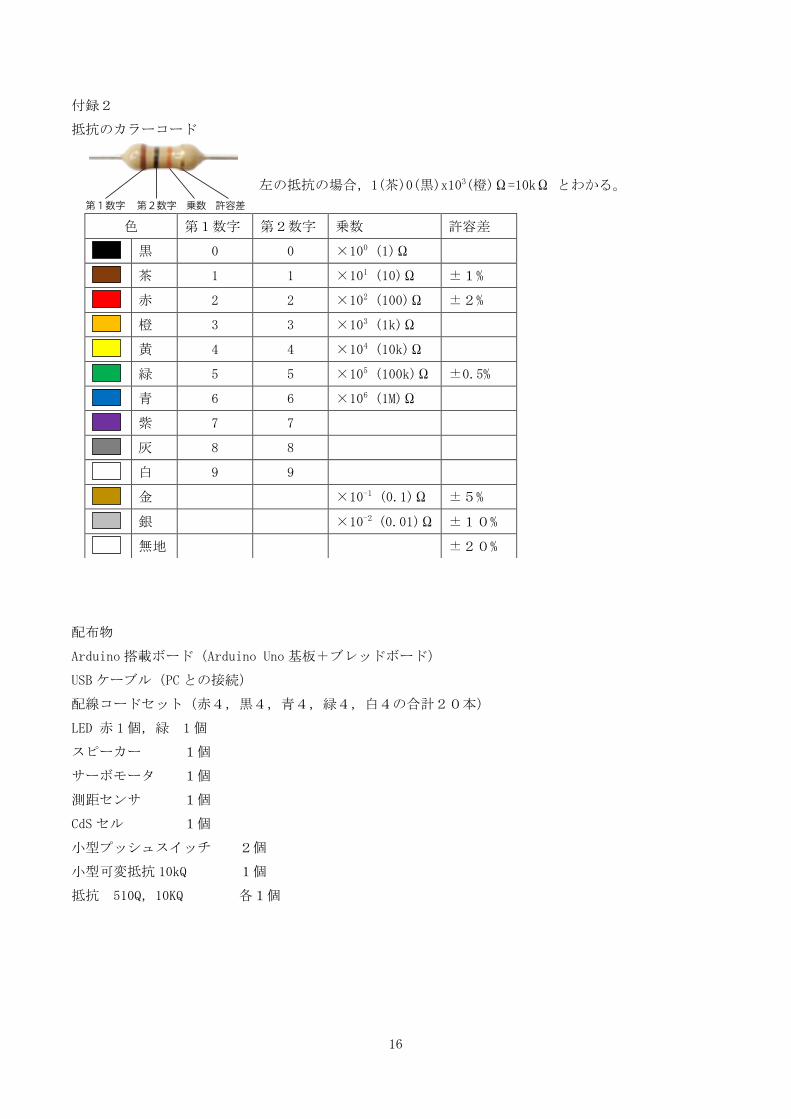
抵抗のカラーコード
左の抵抗の場合,1(茶)0(黒)x103(橙)Ω=10kΩとわかる。
配布物
Arduino 搭載ボード(ArduinoUno 基板+ブレッドボード)
USB ケーブル(PC との接続)
配線コードセット(赤4,黒4,青4,緑4,白4の合計20本)
LED赤 1 個,緑 1 個
スピーカー 1個
サーボモータ 1個
測距センサ 1個
CdS セル 1個
小型プッシュスイッチ 2個
小型可変抵抗 10kQ 1個
抵抗 510Q,10KQ 各1個
第1数字 第2数字 乗数 許容差
色 第1数字 第2数字 乗数 許容差
黒 0 0 ×100(1)Ω
茶 1 1 ×101(10)Ω ±1%
赤 2 2 ×102(100)Ω ±2%
橙 3 3 ×103(1k)Ω
黄 4 4 ×104(10k)Ω
緑 5 5 ×105(100k)Ω ±0.5%
青 6 6 ×106(1M)Ω
紫 7 7
灰 8 8
白 9 9
金 ×10-1(0.1)Ω ±5%
銀 ×10-2(0.01)Ω ±10%
無地 ±20%

17
付録3 自分でもっと何かやってみたいと思う人へ
希望者には,今回のセットを夏休み中など随時貸し出しします。理工2号館4F に取りに来てください。
理工2号館4F に来て作業して(遊んで)も構いません。
前述の配布セットの他に以下のものもあります。
欲しいものがあれば,買えるものもありますので,相談してください。
何かわからないことがあれば,気軽に聞きに来てください。
・LCDモニタ ・ステッピングモータ
・半田付けをするための基板やワイヤー類
・その他の電子部品(トランジスタなど,かなりのものは揃っています)
・RaspberryPi(超小型パソコン)
キーボードやモニタを接続して,
パソコンとして使えます。
以下は理工2号館4F での使用はできますが,貸し出しはできません。
・はんだごて
・オシロスコープ ・テスタ
・Arduino2WDRobot (信号の時間変化を見る装置) (電圧などを図る装置)
参考文献
高橋隆雄著「Arduino で電子工作をはじめよう!(第2販)」秀和システム(2013)
・DCモータ
(サーボ機能が付いて
いないもの)
・モータードライバ
(DC モータの回転を簡単に
制御できるようにするもの)
・XBee 通信モジュール
・温度センサ,湿度センサ
・ドットマトリックスLED
・7 セグメントLED