一种基于二值特征的书画鉴证方法 - paper.edu.cn · 第9卷 第16 期 vol.9 no.16 2016...
TRANSCRIPT
第9卷 第16期 Vol.9 No.16 2016 年 8 月 August 2016
一种基于二值特征的书画鉴证方法 周浩得,刘建国*
(华中科技大学自动化学院,武汉 430074)
摘要:研究基于二值特征的书画鉴证,利用图像二值特征匹配技术,对该艺术品以前的存照和现在的图像进行
匹配,判断两组图像是否来源于同一作品。由于书画备案时使用平台式成像设备采样,而在鉴证时使用手持
式设备拍摄,两种设备的图像质量差异较大,简单的图像匹配方法表现较差。于是提出一种融合使用 ORB 算
法和 BRISK 算法的方法,综合两种算法的图像匹配结果给出鉴证结果。实验结果表明,针对质量差异较大的
两组图像,该方法能够很好地解决匹配问题,并且能够给出可信度较高的初步鉴证结果。
关键词:图像处理;书画鉴证;二值特征;特征融合 中图分类号:TP391.4 文献标识码:A 文章编号:1674-2850(2016)16-1712-07
A method for painting assurance based on binary features ZHOU Haode, LIU Jianguo
(School of Automation, Huazhong University of Science and Technology, Wuhan 430074, China)
Abstract: The goal of this paper is to study painting assurance by binary-feature-based image matching. With feature-based matching technique, we match the recorded and current images of the artwork, to judge whether these two sets of images come from the same artwork or not. Painting assurance based on handheld and platform imaging device, means to sample the painting with platform when records, and to identify based on the images of poor quality from handheld device. Because the images from handheld device are of low quality, normal methods cannot get a satisfactory matching result. This paper proposes an assurance method with ORB feature and BRISK feature. Experimental results show that the multi-feature fusion method can solve the matching problem of images of different quality, and the painting assurance result is of high reliability. Key words: image processing; painting assurance; binary feature; multi-feature fusion
0 引言 书画作为最常见的艺术品,在艺术品投资领域的比重超过 30%. 但赝品一直阻碍着书画投资的发展。
随着扫描和打印技术的发展,造假工艺一般都采用了超高清扫描和打印技术,依靠肉眼根本不可能识别,
这更突显出书画鉴证的重要性。最常见的鉴证方法为数码摄影分析,对书画真迹进行拍照备案,当需要
鉴证时,再对书画进行拍照,将现照与备案照片进行对比和判断。目前对于结果的判断离不开专业人员。 本文采用常见的数码成像设备,研究计算机辅助的书画鉴证方法。备案时使用平台式成像设备进行
微观点拍摄,鉴证时采用便携的手持式电子显微镜。对获得的两组图像,采用特征匹配技术进行图像匹
配,计算两图相似度。在特征匹配算法中,SIFT 算法是效果最好的算法之一,由 LOWE[1]于 1999 年提
出,并在 2004 年完善。SIFT 算法在图像旋转、尺度和平移等变换的情况下,拥有很好的健壮性。改进
的 SIFT 算法有 SURF 算法和 DSP-SIFT 算法等[2~4]。这一类类似算法采用了浮点数向量来对特征进行描
作者简介:周浩得(1990—),男,硕士研究生,主要研究方向:模式识别与智能系统 通信联系人:刘建国,教授,主要研究方向:图像处理、快速计算. E-mail: [email protected]
Vol.9 No.16
August 2016 中国科技论文在线精品论文 1713
述,因此被称为基于向量特征的方法。 基于二值特征的方法是另一大类特征算法,在检测和匹配速度上更快,同时需要更少的存储空间。
基于二值方法的主要思想是逐个使用比特位来表示特征点邻域像素的比较结果。本文的书画鉴证方法就
是基于二值特征算法来进行图像匹配。
1 二值特征 主要采用了 ORB[5]和 BRISK[6]两种算法进行书画鉴证。与 SIFT 等向量特征相比,这两种二值特征
算法的检测、描述和匹配速度非常快。同时,结合两者可以使鉴证结果更稳定、可信度更高。
1.1 ORB 特征
ORB 特征全称为 oriented FAST and rotated BRIEF,使用 FAST 方法[7]检测特征点,并计算方向,再
使用 BRIEF 算法[8]进行特征描述。
1.1.1 特征检测
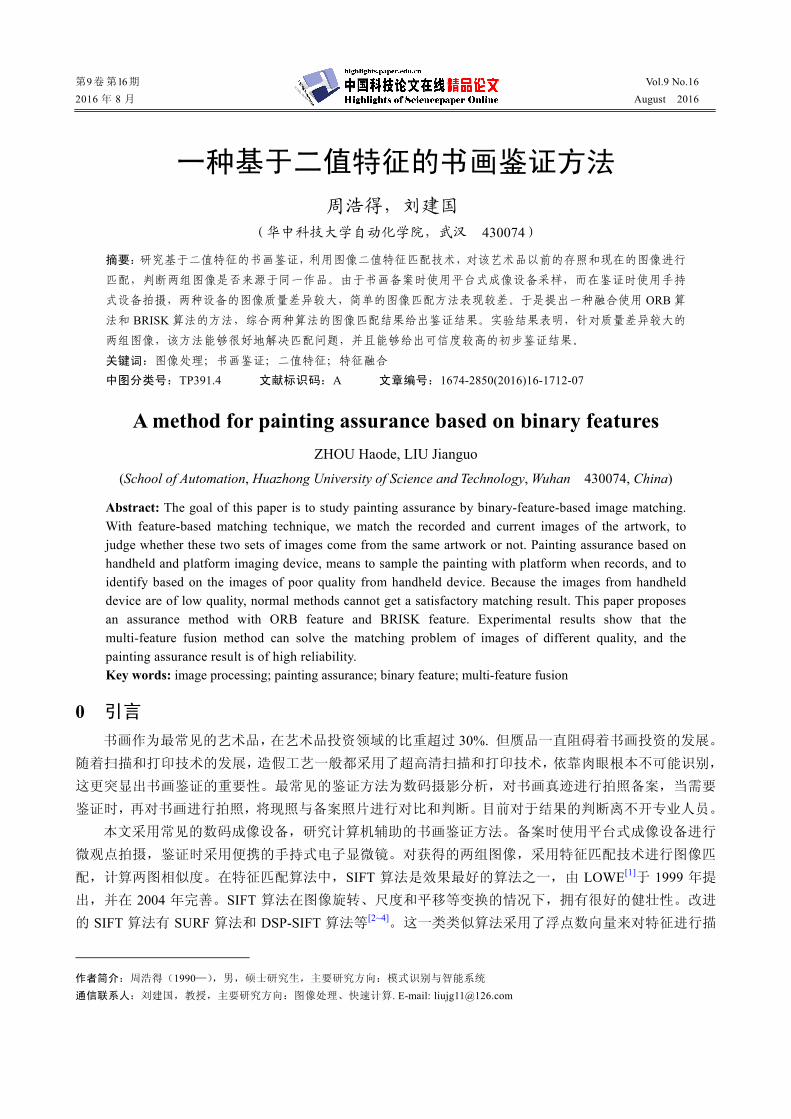
FAST 算法是一种角检测方法,如果
某个像素的周围邻域内与它差异大的像
素足够多,则这个点是一个 FAST 角点。
在具体实现中,周围邻域是指以该像素为
中心固定半径的圆周像素,差异计算则为
简单的灰度值比较,数量足够多一般指大
于或等于 3/4 的圆周像素数量。图 1 为FAST 角点的一次检测,半径为 4 个和
16 个邻域点,需要至少连续 12 个像素点
和中心点灰度值的差异同时大于或者同
时小于预先指定的阈值。 ORB 算法在 FAST 角检测方法的基础上进行了改进。FAST 方法的一个问题是对特征点好坏并没有一
个量化评价,而且会对边缘响应比较大,因此 ORB 算法的作者在 FAST 检测中先使用一个比较低的阈
值,得到数量较多的特征点,再使用 Harris 角点对这些特征点进行量化评价,获得所需数量的最优特征
点。另一个问题是 FAST 不是一个多尺度的特征,ORB 算法为此构造了一个尺度金字塔来改善尺度不变
性。最后一个问题就是特征方向,ORB 算法使用了强度矩心(intensity centroid)表示方向,这是一种简
单且有效的方法。该方法使用矩来量化方向,矩的计算公式为
,
( , )p qpq
x ym x y I x y=∑ , (1)
其中,p、q 取值为 0 或 1;x 和 y 为像素坐标。 上述过程完成了所需数量的特征点的检测并量化了特征方向,接下来需要对检测到的特征进行描述。
1.1.2 特征描述
ORB 算法采用二值串对特征进行描述。二值串就是 0 和 1 组成的序列,能够很快地进行比较。简单
来说,基于二值的描述子(binary-based descriptor)就是在特征点及其邻域像素中选出具有代表性的像素
对,将每个像素对的 2 个像素进行比较,结果为 0 或者 1,所有像素对的比较结果组成一个二值串,就
图 1 FAST 特征检测
Fig. 1 FAST feature detection
第9卷 第16期
2016 年 8 月 周浩得等:一种基于二值特征的书画鉴证方法 1714
得到特征描述子。 BRIEF 算法是 ORB 特征描述的基础算法,它将一对像素的比较定义为
1 ( )< ( )
( ; , ) :0
p x p yp x yτ
⎧= ⎨⎩
, ,
,其他, (2)
其中,p 为特征点所在块或斑点;x 和 y 为 2 个像素;p(x)为 x 的灰度值。式(2)为一对像素的比较公式,
如果选定了 n 对像素,那么一个 BRIEF 特征描述子就可表示为
d
d
1
1( ) : 2 ( ; , ).i
n i ii n
f p p x yτ−= ∑≤ ≤
(3)
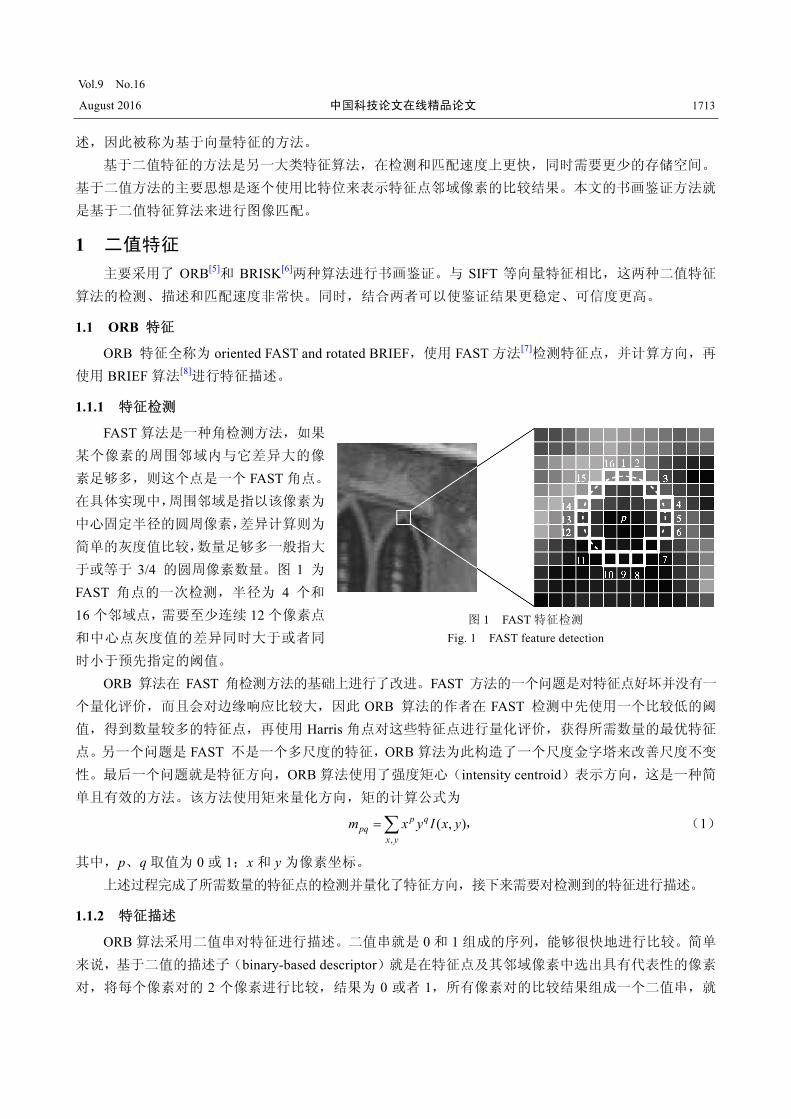
BRIEF 描述子中 n 的常见取值有 128、256 和 512,分别对应 BRIEF-16、BRIEF-32 和 BRIEF-64. 对于像素对的选择,BRIEF 算法的作者提出了 5 种模式,这些模式都是根据某种分布如高斯分布随机采样
得到的,如图 2 所示。 在 BRIEF 算法的基础上,ORB 方法在特征描述方面主要进行了如下改进: 1)根据特征方向变换特征点邻域,使得特征描述拥有一定旋转不变性; 2)像素对的选择不再基于某种分布的随机选择,而是通过训练得到普遍效果较好的像素对模版; 3)将像素对比较改为小块比较,使得结果不容易受到噪声影响。 根据实验结果,ORB 算法获得了与 SIFT 算法差不多的匹配结果,耗时远少于 SIFT 算法的十分之一。
1.2 BRISK 特征
与 ORB 类似,BRISK 算法采用了 AGAST 方法进行特征点检测,AGAST 方法基于 FAST 方法进行
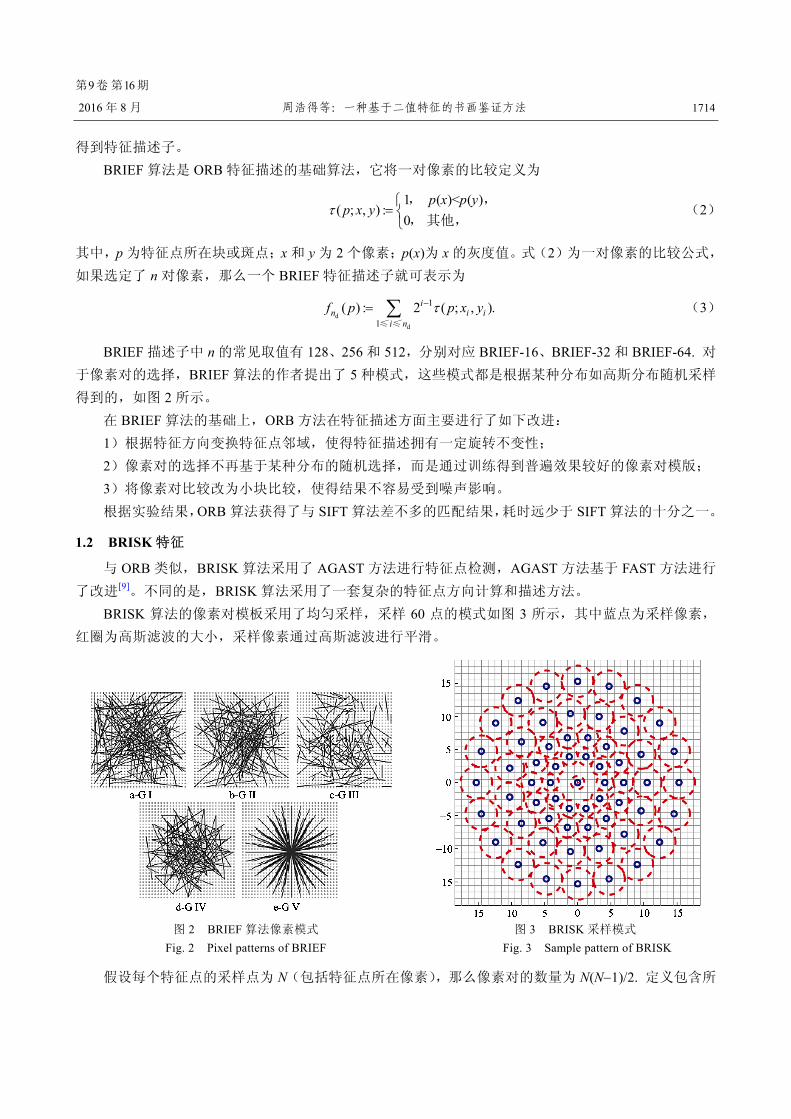
了改进[9]。不同的是,BRISK 算法采用了一套复杂的特征点方向计算和描述方法。 BRISK 算法的像素对模板采用了均匀采样,采样 60 点的模式如图 3 所示,其中蓝点为采样像素,
红圈为高斯滤波的大小,采样像素通过高斯滤波进行平滑。
图 2 BRIEF 算法像素模式 图 3 BRISK 采样模式
Fig. 2 Pixel patterns of BRIEF Fig. 3 Sample pattern of BRISK
假设每个特征点的采样点为 N(包括特征点所在像素),那么像素对的数量为 N(N−1)/2. 定义包含所
Vol.9 No.16
August 2016 中国科技论文在线精品论文 1715
有像素对的集合为
{ }2 2( , ) | , .i jA p p R R i N j i i j N= ∈ × < ∧ < ∧ ∈ (4)
将像素对分为两个子集,分别是短距离子集和长距离子集:
{ }max( , ) | || ||i j j iS p p A p p Aδ= ∈ − < ⊆ ,
{ }min( , ) | || ||i j j iL p p A p p Aδ= ∈ − > ⊆ , (5)
max min9.75 =13.67t tδ δ= , ,
其中,t 为特征点的尺度,参数大小为作者的建议,使得最终描述子长度为 512 位。长距离子集用于计算
特征点方向,短距离子集用于构造特征描述。根据特征方向变换特征点邻域,再计算短距离子集的像素
对比较结果,得到 BRISK 二值描述子。
2 基于二值特征的鉴证方法 2.1 多特征融合方法
单一的算法难以在书画鉴证的应用中获得良好的结果,原因在于来自平台式和手持式两种成像设备
的图像差异非常大。对同一个点进行微观采集,放大倍率也相同,但由于设备性能问题,手持设备所得
图像的分辨率要低得多,而且清晰度也比较差。本文融合两种特征,综合考虑 ORB 算法和 BRISK 算法
的匹配结果,给出最后的鉴证结果。实验表明,这种多特征融合方法能够很好地解决混合鉴证中出现的
问题,给出可信度较高的鉴证结果。 特征融合方法一般可以分为两种:一种是简单的按照原方法使用,只是综合考虑各个结果后再给出
最后结果,例如每种特征一个加权评分,根据总分给出结果;另一种是混合使用两种方法,一种方法用
作特征检测,另一种方法用来描述所检测到的特征,例如常见的基于浮点数方法进行检测而基于二值方
法进行描述。这里采用第一种方法,目的在于通过使用多种特征来解决图像差异大的问题;另外对两种
特征算法进行了级联式的使用,先后使用 ORB 算法和 BRISK 算法进行图像匹配,任意一种算法匹配不
成功,就判断两组图像不是来自同一幅书画。
2.2 特征匹配与配准
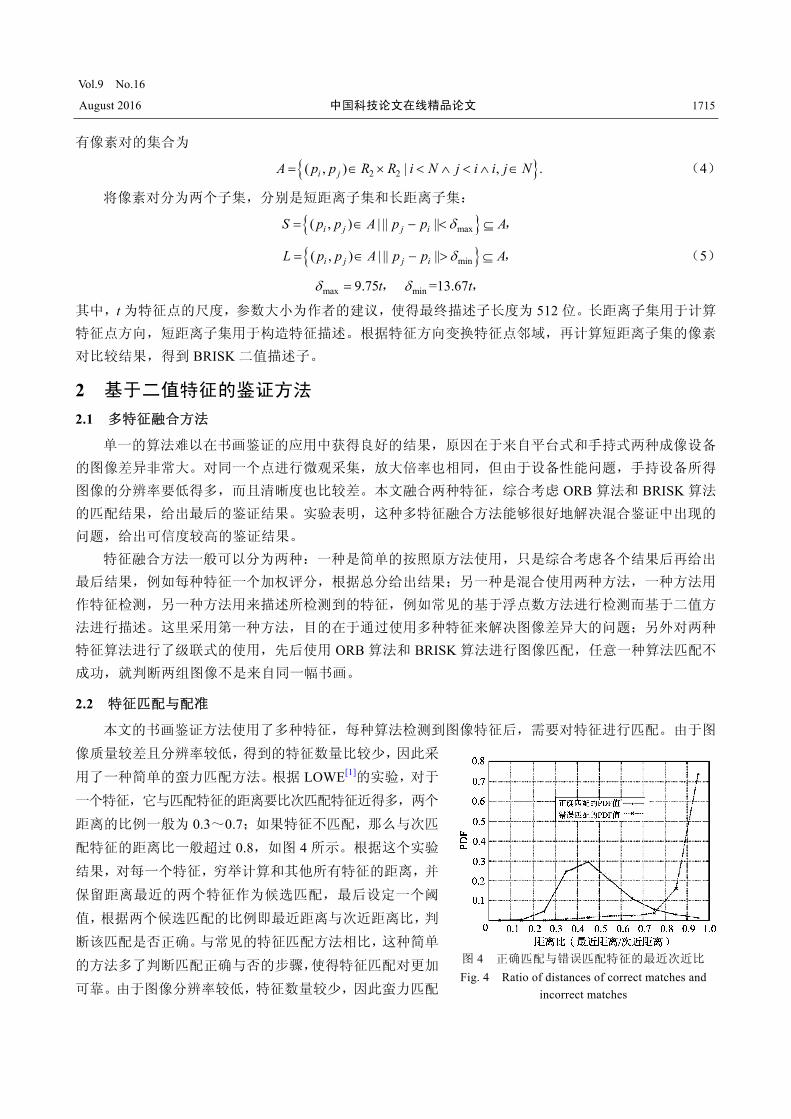
本文的书画鉴证方法使用了多种特征,每种算法检测到图像特征后,需要对特征进行匹配。由于图
像质量较差且分辨率较低,得到的特征数量比较少,因此采
用了一种简单的蛮力匹配方法。根据 LOWE[1]的实验,对于
一个特征,它与匹配特征的距离要比次匹配特征近得多,两个
距离的比例一般为 0.3~0.7;如果特征不匹配,那么与次匹
配特征的距离比一般超过 0.8,如图 4 所示。根据这个实验
结果,对每一个特征,穷举计算和其他所有特征的距离,并
保留距离最近的两个特征作为候选匹配,最后设定一个阈
值,根据两个候选匹配的比例即最近距离与次近距离比,判
断该匹配是否正确。与常见的特征匹配方法相比,这种简单
的方法多了判断匹配正确与否的步骤,使得特征匹配对更加
可靠。由于图像分辨率较低,特征数量较少,因此蛮力匹配
图 4 正确匹配与错误匹配特征的最近次近比 Fig. 4 Ratio of distances of correct matches and
incorrect matches
第9卷 第16期
2016 年 8 月 周浩得等:一种基于二值特征的书画鉴证方法 1716
耗时也不会太多。
对特征匹配对,应用 RANSAC 方法计算两幅图像的变换矩阵。在使用 RANSAC 方法得到变换矩阵后,
简单地对变换矩阵进行一个检查,对正方形的 4 个角点应用得到的变换矩阵,如果变换后的 4 个点组成的
图形和正方形差异较大,例如 4 个角远大于或小于 90°或者尺度变化太大,则判断两图不匹配;如果变换
后的图形基本能保持矩形,那么判断两图可以匹配。这种简单的匹配判断方法不需要对整幅图像进行变换,
也不需要计算后续的互相关,因此判断快速,适合在使用手持式设备的书画鉴证中使用。
2.3 图像相似度
采用一种间接的方法来表示两图的相似程度,也就是通过 Precision 和 Matching Score 两种参数,如
式(6)所示。简单来说,Precision 是通过 RANSAC 方法筛选后的特征配对数和原始特征配对数的比例,
Matching Score 是筛选后的特征配对数占总特征数的百分比。一般来说,两幅图像的相似度越高,这两个
参数也越大,因此可以用作间接的相似度表示方法。另外,这两个参数计算量远比互相关等常见相似度
量化方法要低,实际耗时因此更少。通过实验设定两个阈值,以此判断两图是否相似或者是否来自同一
幅作品。
Precision= #Correct Matches/#Putative MatchesMatching Score= #Correct Matches/#Features.
,
(6)
总的来说,所研究的书画鉴证方法主要以 ORB 和 BRISK 两种特征算法的图像匹配结果来进行判断,
每种算法根据匹配效果、Precision 和 Matching Score 来判断两图是否匹配,任意一种算法判断不匹配则
认为两组图像不是来自同一幅作品,两种算法都判断匹配则认为两组图像来自同一幅书画作品。
3 实验与结果 实验使用的图像分为两种:备案图像由平台式成像设备采集而来,分辨率为 1 468 像素×2 203 像素;
鉴证图像使用手持式设备拍摄,分辨率为 640 像素×480 像素. 放大倍数均为 60 倍,图像格式为 JPG. 预处理时将备案图像降采样到 480 像素×640 像素,使得两组图像分辨率处于同一级别,再进行图像匹配。
实验图像根据来源主要分为三类:1)来自同一幅作品;2)分别来自真品和仿品;3)来自不同仿品。实
现的程序基于 OpenCV 的 C++ API 进行开发,开发工具为 Visual Studio 2010. 实验平台的操作系统为
Win8,64 位,CPU 为 Intel Pentium G840 2.80 GHz,内存为 4 GB.
3.1 ORB 和 BRISK 算法结果
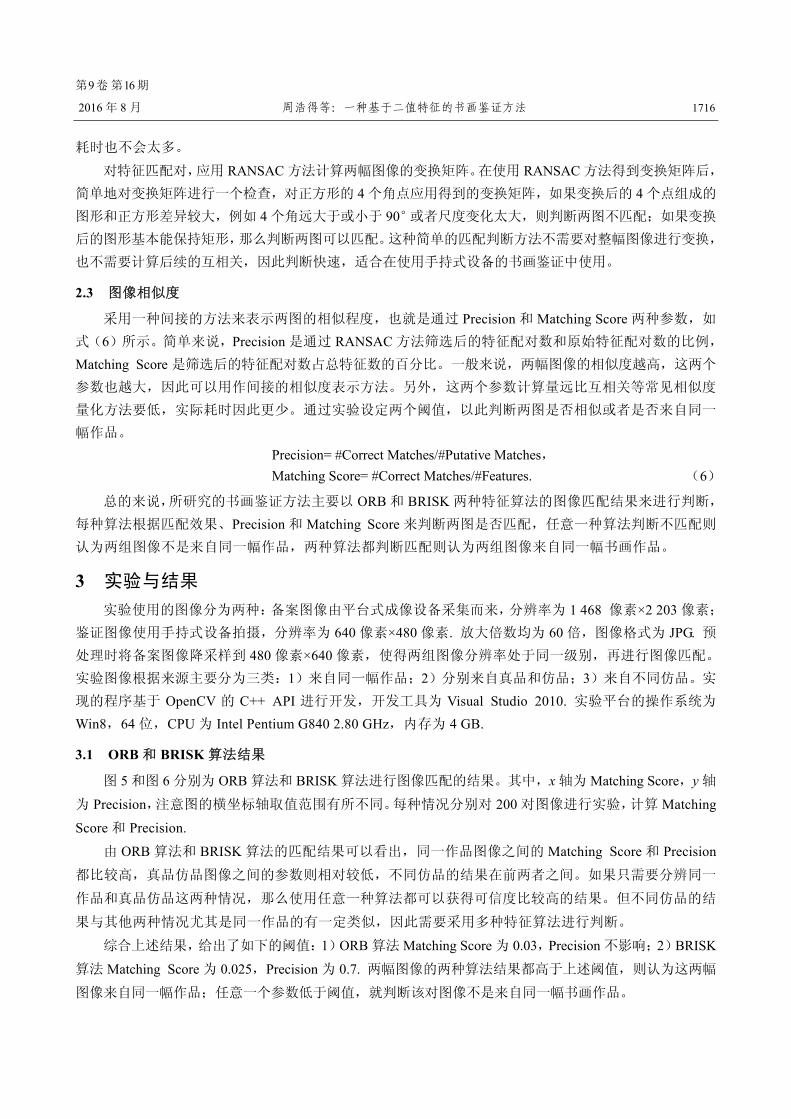
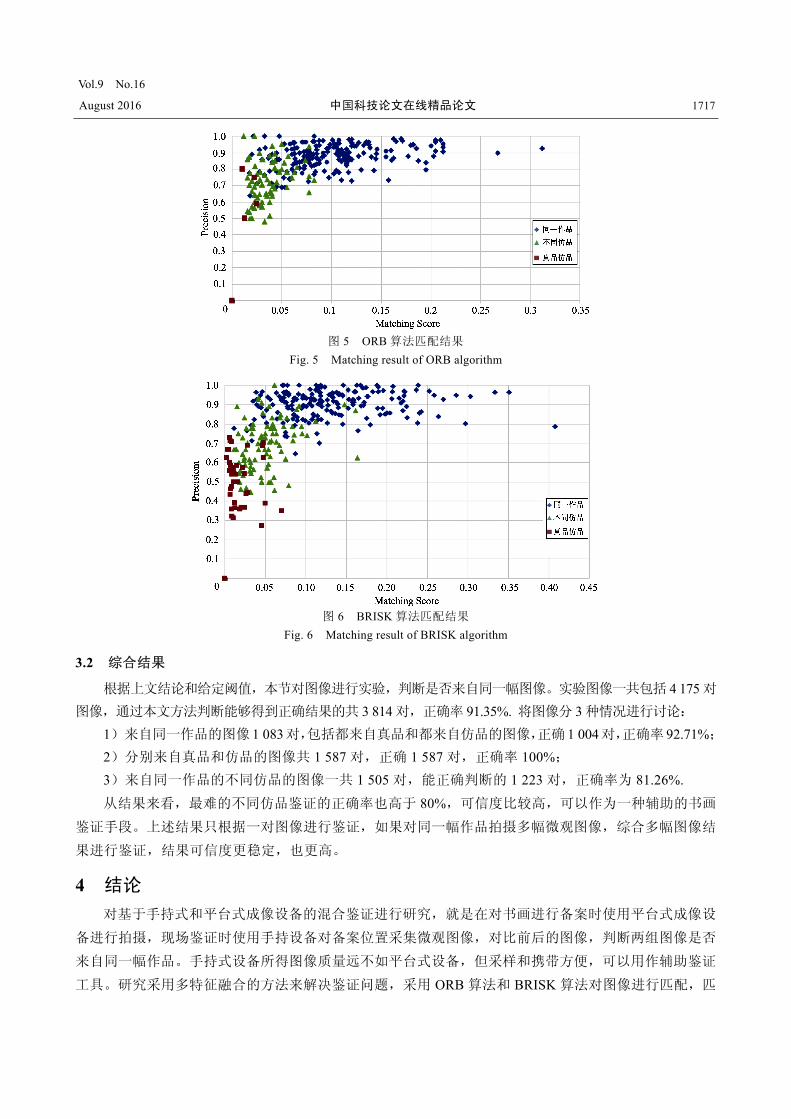
图 5 和图 6 分别为 ORB 算法和 BRISK 算法进行图像匹配的结果。其中,x 轴为 Matching Score,y 轴
为 Precision,注意图的横坐标轴取值范围有所不同。每种情况分别对 200 对图像进行实验,计算 Matching
Score 和 Precision.
由 ORB 算法和 BRISK 算法的匹配结果可以看出,同一作品图像之间的 Matching Score 和 Precision
都比较高,真品仿品图像之间的参数则相对较低,不同仿品的结果在前两者之间。如果只需要分辨同一
作品和真品仿品这两种情况,那么使用任意一种算法都可以获得可信度比较高的结果。但不同仿品的结
果与其他两种情况尤其是同一作品的有一定类似,因此需要采用多种特征算法进行判断。
综合上述结果,给出了如下的阈值:1)ORB 算法 Matching Score 为 0.03,Precision 不影响;2)BRISK
算法 Matching Score 为 0.025,Precision 为 0.7. 两幅图像的两种算法结果都高于上述阈值,则认为这两幅
图像来自同一幅作品;任意一个参数低于阈值,就判断该对图像不是来自同一幅书画作品。
Vol.9 No.16
August 2016 中国科技论文在线精品论文 1717
图 5 ORB 算法匹配结果
Fig. 5 Matching result of ORB algorithm
图 6 BRISK 算法匹配结果 Fig. 6 Matching result of BRISK algorithm
3.2 综合结果
根据上文结论和给定阈值,本节对图像进行实验,判断是否来自同一幅图像。实验图像一共包括 4 175 对
图像,通过本文方法判断能够得到正确结果的共 3 814 对,正确率 91.35%. 将图像分 3 种情况进行讨论: 1) 来自同一作品的图像 1 083对,包括都来自真品和都来自仿品的图像,正确 1 004对,正确率 92.71%; 2)分别来自真品和仿品的图像共 1 587 对,正确 1 587 对,正确率 100%; 3)来自同一作品的不同仿品的图像一共 1 505 对,能正确判断的 1 223 对,正确率为 81.26%.
从结果来看,最难的不同仿品鉴证的正确率也高于 80%,可信度比较高,可以作为一种辅助的书画
鉴证手段。上述结果只根据一对图像进行鉴证,如果对同一幅作品拍摄多幅微观图像,综合多幅图像结
果进行鉴证,结果可信度更稳定,也更高。
4 结论 对基于手持式和平台式成像设备的混合鉴证进行研究,就是在对书画进行备案时使用平台式成像设
备进行拍摄,现场鉴证时使用手持设备对备案位置采集微观图像,对比前后的图像,判断两组图像是否
来自同一幅作品。手持式设备所得图像质量远不如平台式设备,但采样和携带方便,可以用作辅助鉴证
工具。研究采用多特征融合的方法来解决鉴证问题,采用 ORB 算法和 BRISK 算法对图像进行匹配,匹

第9卷 第16期
2016 年 8 月 周浩得等:一种基于二值特征的书画鉴证方法 1718
配结果采用 Matching Score 和 Precision 两种参数进行量化,匹配结果均通过则认为两组图像来自同一幅
作品。实验表明,单一特征难以很好地进行鉴证,而多特征融合方法对两幅图像的鉴证能给出平均正确
率超过 80%的结果。 [参考文献] (References)
[1] LOWE D G. Distinctive image features from scale-invariant keypoints[J]. International Journal of Computer Vision, 2004,
60(2): 91-110.
[2] BAY H, TUYTELAARS T, van GOOL L. Surf: speeded up robust features[C]//Computer Vision-ECCV 2006. Graz, Austria:
Springer Berlin Heidelberg, 2006: 404-417.
[3] MOREL J M, YU G. ASIFT: a new framework for fully affine invariant image comparison[J]. SIAM Journal on Imaging
Sciences, 2009, 2(2): 438-469.
[4] DONG J, SOATTO S. Domain-size pooling in local descriptors: DSP-SIFT[C]//Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition. Boston: IEEE, 2015: 5097-5106.
[5] RUBLEE E, RABAUD V, KONOLIGE K, et al. ORB: an efficient alternative to SIFT or SURF[C]//2011 IEEE International
Conference on Computer Vision (ICCV). Barcelona : IEEE, 2011: 2564-2571.
[6] LEUTENEGGER S, CHLI M, SIEGWART R Y. BRISK: binary robust invariant scalable keypoints[C]//2011 IEEE
International Conference on Computer Vision (ICCV). Barcelona: IEEE, 2011: 2548-2555.
[7] ROSTEN E, DRUMMOND T. Machine learning for high-speed corner detection[C]//Computer Vision-ECCV 2006. Graz,
Austria: Springer Berlin Heidelberg, 2006: 430-443.
[8] CALONDER M, LEPETIT V, STRECHA C, et al. Brief: binary robust independent elementary features[C]//Computer
Vision-ECCV 2010. Heraklion, Crete, Greece: Springer Berlin Heidelberg, 2010: 778-792.
[9] MAIR E, HAGER G D, BURSCHKA D, et al. Adaptive and generic corner detection based on the accelerated segment
test[C]//Computer Vision–ECCV 2010. Heraklion, Crete, Greece: Springer Berlin Heidelberg, 2010: 183-196.