ucmonografia.docx
TRANSCRIPT

Capítulo I
Circuito de propulsión principal
1.1 Tracción eléctrica
La tracción eléctrica es una alternativa que se mostró por primera vez en la Exposición
Industrial de Berlín con una demostración impresionante de poder de arrastre. Si bien la
locomoción con máquinas a vapor es mas antigua, la electricidad mostraba ya en esos
tiempos las ventajas de tamaño, eficiencia y limpieza. La tracción eléctrica aplicada a los
camiones ha seguido la evolución del control de velocidad de los motores eléctricos, es
decir de los variadores de velocidad DC/AC.
El punto de quiebre de la tecnología del control de la velocidad además de los problemas
que cada tipo de motor tiene para el control de velocidad, ha sido sin lugar a dudas la
aplicación de los semiconductores a los circuitos de potencia y luego la invención del
microprocesador.
En el caso de los camiones Komatsu las diversas tecnologías empleadas en el control
electrónico de los motores de tracción con las desarrolladas en electrónica de potencia es
similar, aunque no han seguido el ritmo de todos los nuevos dispositivos que aparecieron en
el mercado.
Entre el lanzamiento al mercado del GTO (1970 General Electric) y del IGBT (1990) se
encuentra por ejemplo el IGCT (1997 Siemens) que es una mejora del GTO. Desde las
primeras 120 Toneladas de capacidad de carga, el tonelaje se ha ido incrementando casi a
la par con los nuevos descubrimientos en la electrónica de potencia. Curiosamente uno de
los puntos críticos en el diseño de nuevos modelos son las llantas. Es cada vez más
6

problemático encontrar los materiales capaces de soportar los enormes esfuerzos
mecánicos y el desgaste que ocasiona el transporte de grandes cargas.
La automatización ha tomado también el control de la operación del camión. Komatsu tiene
en la actualidad el modelo autónomo o robotizado en pruebas de campo en la mina
Radomiro Tomic en Chile y pronto estará operando la mina “Gaby” en el mismo país con 15
camiones autónomos.
Lo que viene, tentando un pronóstico, es naturalmente camiones de mayor tonelaje con
motores eléctricos AC empleados más eficientemente y con sofisticados circuitos y
programas que redundarán en un mejor rendimiento. (Manual Komatsu, 2008)
Este desarrollo puede ser afectado por el agotamiento de los combustibles fósiles pero
queda la alternativa de volver a los orígenes de este tipo de tracción, la alimentación desde
el exterior con líneas eléctricas, de manera similar al recordado tranvía.
El poder de la tracción eléctrica se consigue al aplicar un motor eléctrico en cada rueda
posterior. Este sistema y los circuitos de potencia involucrados se denominan Sistema de
Propulsión Principal. El cambio del tipo de motor ha originado también mejoras en el
sistema mecánico como el de la posición de los mandos finales, más accesibles en los
modelos AC para el personal de mantenimiento.
Los principales componentes del sistema de potencia del camión Komatsu 730E son:
Motor diesel, alternador, rectificador trifásico, motores de tracción, resistencias de frenado y
el soplador.
1.2Funcionamiento básico
El Motor Diesel K2000 a 1900 r.p.m. produce su máximo torque de trabajo, debe ser Capaz
de mantener la máxima Potencia al estar acoplado al alternador principal con este a su
carga nominal. El alternador principal entregara su máxima Potencia siempre y cuando el
Motor Diesel se mantenga a 1900 rpm, este genera una Señal Senoidal Trifásica.
Los terminales T1, T2, T3, son las Fases de salida del Alternador, estas salidas Trifásicas
Sinodales están desfasadas 120º una respecto de otra. El alternador posee tres devanados,
uno es el devanado principal que es la salida principal de voltaje del alternador el cual es
una señal trifásica y además posee dos devanados terciarios los cuales son el voltaje
monofásico que alimentara a los módulos de excitación del mismo alternador como la
7

excitación de los motores de tracción. La excitación del alternador como de los motores de
tracción sirve para regular el torque de estos.
La salida Trifásica ahora debe ser rectificada y convertida en corriente continua a través de
un Rectificador Principal, la que finalmente alimentaran alas ruedas motorizadas. La salida
de Corriente Continua, alimenta las ruedas motorizadas las que están conectadas en serie,
esta condición de motorización solo se aplica en condición de Propulsión en marcha
adelante o marcha atrás.
Para frenar eléctricamente al camión, podemos frenarlo utilizando el retardo dinámico
necesitamos que el Camión a través de la inercia se esté desplazando libremente, en esta
nueva condición de trabajo, las ruedas motorizadas se convertirán en generadores de
Corriente continua, a partir de este momento generan su propia energía la que ahora
deberá ser disipada en un banco resistivo denominado Conjunto de Parrillas. (Manual
Komatsu, 2008)
8
Figura Nº 1.Circuito de potencia eléctrica
Fuente: Manual Komatsu
9
T1
T2
T3
MOTOR DIESEL QSK-60 ALTERNADOR PRINCIPAL RECTIFICADOR PRINCIPAL
RUEDAS MOTORIZADAS
(MT’s)
Circuito de Potencia Eléctrica (Propulsión)

CAPITULO II
EL ALTERNADOR
2.1 Partes principales
El alternador, G.E Modelo GTA-22, es de rotor de ocho polos salientes, trifásico,
autoexcitado con estator conectado en estrella y devanados terciarios. Está montado
solidariamente al motor diesel y es movido por el cigüeñal. El rotor del alternador en la parte
delantera se conecta directamente al cigüeñal del motor diesel a través de una palanca
adaptadora y una placa flexible. En la parte trasera (lado de los anillos colectores), el rotor
está soportado por un rodamiento de bolas. Por sus devanados principales suministra la
energía a las armaduras de los motores de tracción. Por sus devanados terciarios alimenta
a los excitadores estáticos. Mediante un soplador en línea proporciona ventilación a los
motores, equipo de control y para sí mismo.
10

Figura Nº2. Partes del alternador GTA22 del camión 730E
Fuente: Manual Komatsu
2.2 Principio de funcionamiento
Al alternador ingresa corriente continua para generar el flujo magnético constante “φ”, este
flujo induce un voltaje sobre las bobinas de estator. El voltaje inducido es alterno.
Tiene dos devanados adicionales al devanado trifásico del estator. Permiten obtener dos
voltajes monofásicos para los circuitos AFSE, MFSE en los camiones 730E, 830E y solo
uno para el AFSE en los camiones 930E.
11

Figura Nº 3. Bobinado terciario generando tensión AC para el circuito AFSE, camión 730E
Fuente: Manual Komatsu
En la figura anterior se aprecia el bobinado terciario del camión 730E alimentando con el
panel AFSE la excitación del alternador.
Polo es uno de los terminales del dipolo magnético indivisible N-S. Para motores y
alternadores se considera el número de pares de polos denominado “p”.
Se tienen dos clases de rotor, uno denominado de polos salientes y otro de polos lisos.
Ambos tienen aplicación industrial y se les denomina alternadores síncronos.
Siempre se conserva el principio de funcionamiento del alternador síncrono es decir se
requiere corriente de excitación en el rotor.
La característica de “síncrono” se debe al funcionamiento del alternador a una velocidad
constante llamada síncrona.
Esta característica no es propia del camión pues en el camión, el alternador funciona a
velocidad variable.
La frecuencia de la onda alterna generada depende de la velocidad que se aplique al rotor y
del número de polos del alternador.
12

f= p⋅n60
n=Velocidaddelrotor (
RPM )f=Frecuencia(Hz )p=Paresdepolos
Es de notar que la velocidad disminuye con el incremento de polos.
Los alternadores deben girar a velocidad constante para mantener la frecuencia de la
tensión generada. Esta velocidad es denominada Síncrona y se determina con la expresión
ya vista de:
n=60⋅fp
n=Velocidaddelrotor (
RPM )f=Frecuencia(Hz )p=Paresdepolos
La velocidad del motor Diesel varía de acuerdo a la situación de operación del camión y por
consiguiente la frecuencia, datos que podemos observar en la siguiente tabla 1.
Tabla 1.
Velocidad y frecuencia del alternador
Operación n (RPM) f (Hz)
ACC Ralentí 600 120
ACC Alta 1900 380
Retardo 1050 210
Fuente: Manual Komatsu
La relación práctica es de 5 RPM/Hz
El alternador tiene 8 polos (4 pares de polos) si hacemos el cálculo para las velocidades
anteriores obtendremos las frecuencias a las que trabaja el alternador del camión.
13

Tabla 2.
Frecuencia del alternador
Pares de
Polos (p)n (RPM)
Frecuencia
(Hz)
4 600 40
4 1900 127
4 1050 70
Fuente: manual Komatsu
Estas frecuencias difieren con las de la tabla anterior y muestran sobre todo la naturaleza
variable de la velocidad del alternador del camión.
2.3 Control del voltaje y la frecuencia del alternador
El voltaje que genera el alternador se controla modificando la velocidad del rotor (motor
Diesel) y/o modificando la corriente DC de excitación (Circuito AFSE). Este control se
denomina P-F / Q-V.
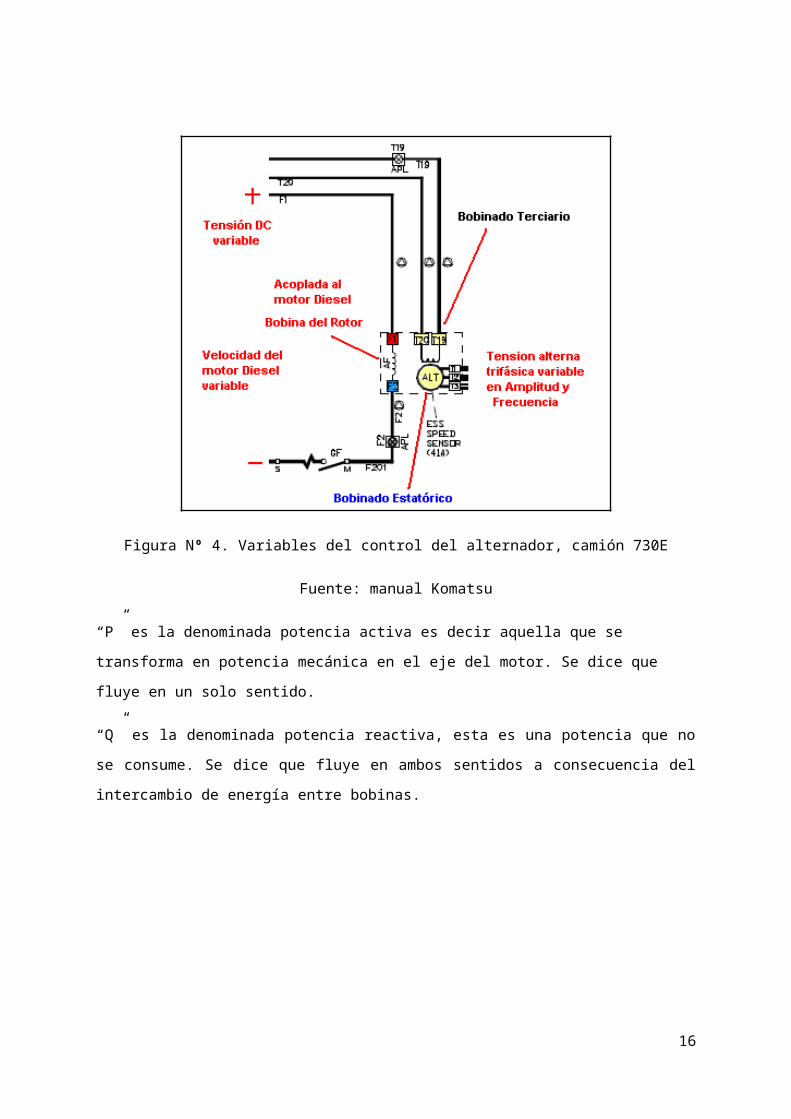
Figura Nº 4. Variables del control del alternador, camión 730E
14

Fuente: manual Komatsu
“P” es la denominada potencia activa es decir aquella que se transforma en potencia
mecánica en el eje del motor. Se dice que fluye en un solo sentido.
“Q” es la denominada potencia reactiva, esta es una potencia que no se consume. Se dice
que fluye en ambos sentidos a consecuencia del intercambio de energía entre bobinas.
Figura Nº 5 Flujo de potencia en la corriente alterna
Fuente: Manual Komatsu
Potencia activa también es la que absorben las resistencias y la transforman en calor, por
otro lado el fenómeno de la potencia reactiva lo ocasiona igualmente los condensadores.
El camión es un sistema independiente con el problema adicional de tener como carga
convertidores electrónicos de potencia es decir puentes semicontrolados, convertidores y
choppers (GTO’s, IGBT’s)
Esta particularidad ocasiona además de un voltaje de salida variable, por el recorte de las
ondas, un ángulo de desplazamiento de fase también variable entre las armónicas
fundamentales de corriente y voltaje.
El uso de convertidores siempre genera desfasajes I/V aun si se emplea carga resistiva
debido a la distorsión de las ondas por tanto aparece un factor de potencia y por
consiguiente potencia reactiva.
La corriente de excitación que requiere el rotor inicialmente se aplica desde una fuente
externa (Batería de 24V), luego el circuito AFSE alimentado por uno de los bobinados
terciarios, controla la alimentación de la excitación; produciéndose una auto alimentación.
15
El concepto de auto excitación considera la existencia de un magnetismo remanente en el
material ferromagnético con el que están construidos en este caso los motores o
alternadores eléctricos. (Manual Komatsu, 2008)
Es el mismo efecto que se produce cuando imantamos un metal con la ayuda de un imán.
Figura Nº 6. Realimentación de la bobina del rotor a partir del bobinado terciario, camión
730E
Fuente: Manual Komatsu
Es de suponer que una permutación no imposibilitaría el trabajo pero si su rendimiento pues
no sería capaz el terciario T13-T14 de generar la corriente máxima que se pueda requerir.
16

CAPITULO III
RECTIFICADOR TRIFASICO
La salida del alternador es una señal trifásica que alimenta al panel rectificador principal. Un
circuito en puente trifásico rectifica la alimentación de corriente alterna en corriente continua
pulsátil para emplearse en el circuito de tracción.
Figura Nº 7. Puente de diodo
Fuente: manual Komatsu
3.1 Diodo de potencia
Los diodos de potencia son empleados en el camión 730 como rectificadores o
convertidores AC-DC en configuración puente.
17

En el camión encontraremos diodos de potencia los encapsulados conocidos con el nombre
de “presión” o “capsula” (Pressure o Capsule) en diferentes formatos.
Requieren disipadores de calor, lo que los vuelve bastante voluminosos; es lo que ocurre
con el rectificador principal que usan todos los módulos de camión.
Figura Nº 8. Uno de los diodos con disipador que componen el rectificador principal
Fuente: manual Komatsu
El símbolo que lo representa es similar al diodo rectificador que se emplea comúnmente en
electrónica para las fuentes de alimentación aunque estructuralmente es distinto tanto en su
apariencia externa como en su disposición de capas semiconductoras.
18

Figura Nº9. Estructura de capas del diodo de potencia
Fuente: Manual Komatsu
Los diodos de potencia poseen tres capas semiconductoras con diferente grado de dopado.
Se sabe que un dopado ligero produce el incremento del voltaje de ruptura pero a su vez
eleva también el voltaje directo.
El diferente dopado se especifica con los signos “+” o “-“ y se puede apreciar que la capa “n”
intermedia es del tipo “-“ y su espesor depende del voltaje inverso que soportará.
La capa débilmente dopada es la que permite que el diodo de potencia soporte mayor
voltaje inverso.
Las características nominales del diodo de potencia son mucho más extensas que las de un
diodo normal.
Estas formas de onda tienen valores RMS y AV distintos y puede ocurrir el caso que el
diodo soporte la corriente AV pero no la RMS. Será entonces necesario seleccionar un
dispositivo más grande.
19

3.1.1. Prueba del diodo de potencia
Como es en general para los semiconductores se tienen cuatro modos de prueba:
a) Con multímetro
b) Con megóhmetro
c) Con trazador de curvas
d) Con probador de diodos
Analizaremos en este capítulo las pruebas con multímetro.
Debemos esperar los siguientes resultados:
Tabla 3.
Pruebas con el multímetro
Multímetro Terminales Resultado
AnalógicoA(+) K(-) Baja resistencia
A(-) K(+) Alta resistencia
DigitalA(+) K(-) <0,6V—0,7V>
A(-) K(+) OL
Fuente: Manual Komatsu
Con los instrumentos digitales debemos emplear la escala para semiconductores pues solo
así podremos tener un voltaje de prueba que pueda superar el voltaje de umbral del diodo.
Las pruebas con multímetro para diodos de potencia no son del todo correctas pues debido
al voltaje con el que trabajan (kV) las posibles fallas por alto voltaje inverso pueden no ser
detectadas. (Manual Komatsu, 2008)
3.2. Tiristores
En los camiones con motores de tracción DC, se encuentran en el rectificador principal, los
módulos AFSE y MFSE; en los camiones con motores AC ya no se emplea el módulo
MFSE.
20

El módulo AFSE (excitación campo del alternador) ha sufrido algunas pequeñas
modificaciones en el tipo de componentes de las tarjetas de disparo y Battery boost en las
versiones recientes pero el funcionamiento es similar.
Figura Nº.10 Vista del interior del módulo AFSE, camión 730E
Fuente: Manual Komatsu
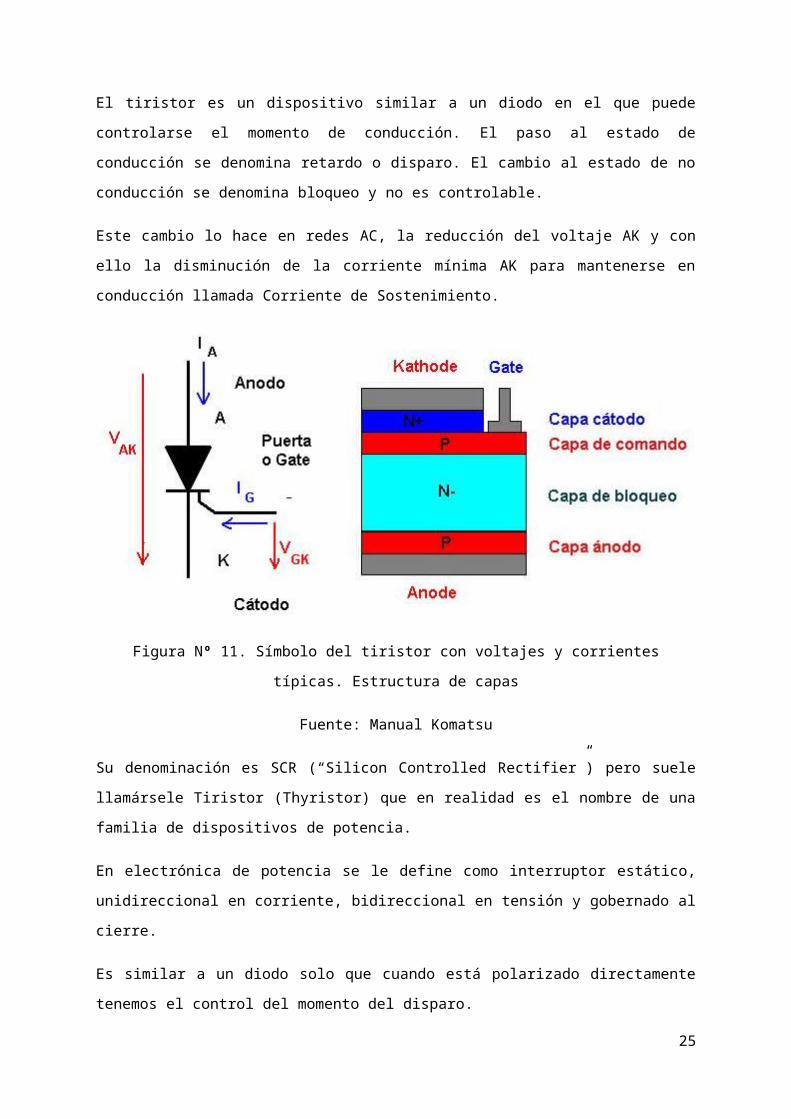
El tiristor es un dispositivo similar a un diodo en el que puede controlarse el momento de
conducción. El paso al estado de conducción se denomina retardo o disparo. El cambio al
estado de no conducción se denomina bloqueo y no es controlable.
Este cambio lo hace en redes AC, la reducción del voltaje AK y con ello la disminución de la
corriente mínima AK para mantenerse en conducción llamada Corriente de Sostenimiento.
21

Figura Nº 11. Símbolo del tiristor con voltajes y corrientes típicas. Estructura de capas
Fuente: Manual Komatsu
Su denominación es SCR (“Silicon Controlled Rectifier”) pero suele llamársele Tiristor
(Thyristor) que en realidad es el nombre de una familia de dispositivos de potencia.
En electrónica de potencia se le define como interruptor estático, unidireccional en corriente,
bidireccional en tensión y gobernado al cierre.
Es similar a un diodo solo que cuando está polarizado directamente tenemos el control del
momento del disparo.
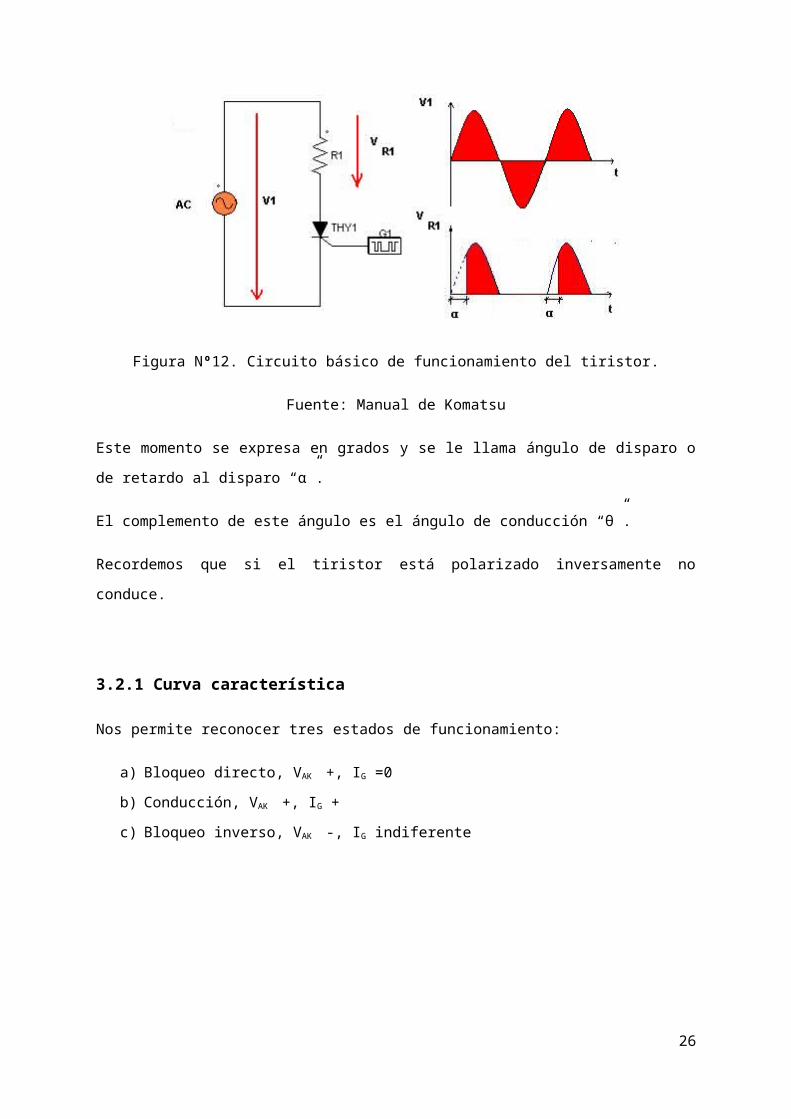
Figura Nº12. Circuito básico de funcionamiento del tiristor.
Fuente: Manual de Komatsu
22

Este momento se expresa en grados y se le llama ángulo de disparo o de retardo al disparo
“α”.
El complemento de este ángulo es el ángulo de conducción “θ”.
Recordemos que si el tiristor está polarizado inversamente no conduce.
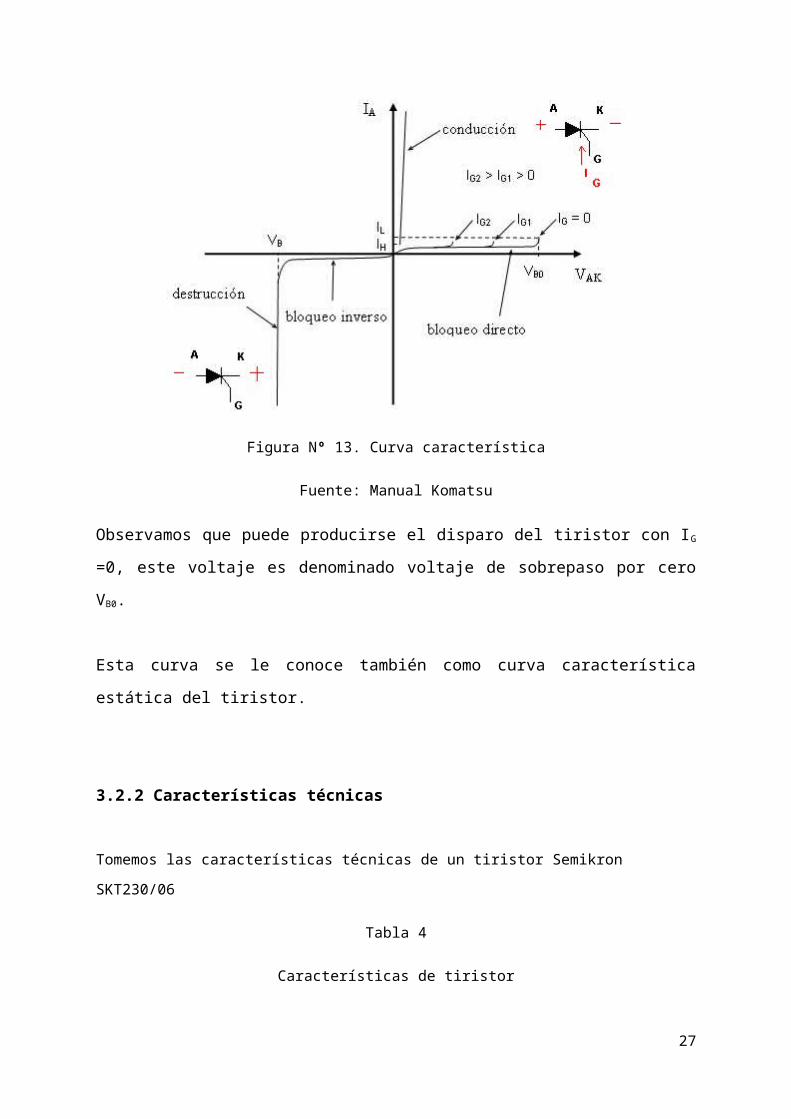
3.2.1 Curva característica
Nos permite reconocer tres estados de funcionamiento:
a) Bloqueo directo, VAK +, IG =0
b) Conducción, VAK +, IG +
c) Bloqueo inverso, VAK -, IG indiferente
Figura Nº 13. Curva característica
Fuente: Manual Komatsu
Observamos que puede producirse el disparo del tiristor con IG =0, este voltaje es
denominado voltaje de sobrepaso por cero VB0.
Esta curva se le conoce también como curva característica estática del tiristor.
23

3.2.2 Características técnicas
Tomemos las características técnicas de un tiristor Semikron SKT230/06
Tabla 4
Características de tiristor
VRRM VDRM VRSM IFAV IFRMS
IFSM
10msI²t VGD
1kV 1kV 1,1 kV 230 A 600 A 4000 A 180 000 A².s0,25
V
VGT IGT VF rT IH IL
3 V 200 mA 1,1 V 1,1 m 250 mA 600 mA
Fuente: Manual Komatsu
Para el estado de bloqueo inverso:
VRRM = Voltage Reverse Repetitive Max
VRSM = Voltage Reverse Surge Max
Para el estado de bloqueo directo:
VDRM = Voltaje Direct Repetitive Max
Para el estado de conducción:
IFAV = ITAV = Current Forward Average
IFRMS = ITRMS = Current Forward Rooth Mean Square
IFSM = ITSM = Current Forward Surge Max
I2.t = Capacidad térmica
F= Forward
24
G= Gate
T = Trigger
H = Hold
El consumo de potencia por el circuito de gate es por ejemplo para este caso 0,6W.
3.2.3 Formas de disparo de los tiristores
Si deseamos un funcionamiento Todo-nada del tiristor (interruptor) se puede emplear una
fuente adicional DC o AC.
Si empleamos la fuente AC el disparo ocurrirá en el momento en que el voltaje aplicado al
gate sea el suficiente para disparar el tiristor.
Este voltaje es pequeño, en los tiristores de potencia depende de los dispositivos
adicionales empleados en el circuito de disparo y puede ser del orden de las decenas de
voltios.El voltaje GK es pequeño y no supera los 4V.
Se pueden emplear tres formas de disparo:
a) Un pulso único
b) Un impulso prolongado
c) Un tren de pulsos
El pulso único debe ser bastante enérgico por lo menos 5-6veces el valor de corriente de
gate para el disparo (IGT ) y de un tiempo de subida rápido 0,1-0,5us.
Figura Nº 14 Amplitud y tiempo de subida del pulso único
Fuente: Manual Komatsu
Es posible emplear un solo pulso debido a la característica biestable del tiristor.
25
El pulso prolongado equivale al disparo por corriente continua. Tiene por desventaja que no
podremos emplear transformadores de aislamiento para separar el circuito de potencia del
circuito de disparo.
Dependiendo de la ubicación de los tiristores el modo de disparo es diferente. Solo
encontramos del tipo pulso prolongado en el circuito Battery boost en particular el SCR3.
El tipo pulso único lo encontramos en el circuito Crowbar controlando el tiristor SCR4.
Los otros tiristores controlan potencia y carga inductiva para lo que se acostumbra emplear
trenes de pulsos generados por el procesador.
3.2.4 Prueba del tiristor
Con un multímetro solo pueden detectarse los tiristores que estén completamente en
cortocircuito y son válidas las condiciones enunciadas para los diodos de potencia.
Tabla 5.
Prueba de tiristor
Multímetro Terminales Resultado
AnalógicoA(+) K(-) Alta resistencia
A(-) K(+) Alta resistencia
DigitalA(+) K(-) OL
A(-) K(+) OL
Fuente: Manual Komatsu
Notamos que la prueba es deficiente pues falta saber si el circuito es capaz de entrar en
conducción.
Deben probarse en forma dinámica, es decir hacerlos funcionar. Existen equipos
especializados como el trazador de curvas y los testeadores muy usados para estos
dispositivos.
Para tiristores pequeños es posible hacer una prueba con multímetro colocando las puntas
polarizando directamente al tiristor (escala semiconductores) se conecta momentáneamente
con la punta positiva al gate, el tiristor debe marcar de OL a un voltaje del AK. (Manual
Komatsu, 2008)
26
CAPITULO IV
MOTORES DE TRACCION
Los motores de tracción ubicados dentro de cada estructura de rueda trasera reciben
energía eléctrica desde el puente rectificador. Los dos motores de tracción convierten
energía eléctrica en energía mecánica a través de trenes de engranaje incorporados dentro
de la estructura de la rueda. La dirección de los motores de mando es controlada por el
interruptor selector manual de avance o retroceso ubicado en una consola en la cabina al
lado derecho del operador.
Estos motores de tracción son de corriente continua, 4 polos, diseñados para 2350 RPM
como máximo, ventilados por aire del soplador que esta acoplado al alternador principal.
4.1 Partes principales
El motor de tracción es en realidad un conjunto de dispositivos; además del motor están:
Figura Nº 15. Mando final del motor de tracción, camión 730E
27

Fuente: Manual Komatsu
a) El freno de servicio
b) El freno de parqueo
c) El sensor de velocidad
d) El sensor de temperatura
e) El mando final
Este motor ha sido diseñado exclusivamente para el camión, las diferencias se encuentran
primero en la potencia que desarrollan, luego el elevado voltaje que emplean y finalmente el
funcionamiento como generador.
La estructura eléctrica es más bien similar a la de los motores DC.
a) Estator con los polos e interpolos
b) Rotor o armadura
c) Colector
d) Escobillas
Figura Nº 16. Armadura del motor de tracción, camión 730E
Fuente: Manual Komatsu
En el estator se aprecian devanados de campo (polos) y otros más pequeños llamados
interpolos.
28

Existen tres tipos de motores, cada uno de estos tipos tiene diferentes características
torque-velocidad. Los camiones emplean el tipo excitación independiente debido a que la
característica velocidad-torque se adecua al funcionamiento requerido por el motor DC y la
carga característica del camión.
Figura Nº 17. Curvas características del motor de excitación independiente
Fuente: Manual Komatsu
4.2 Características técnicas del motor
La corriente por la armadura genera un campo llamado reacción de inducido, este campo
con el del estator dan como resultante un campo cuya “línea neutra” está físicamente fuera
de los polos.
Para corregir este desplazamiento se emplean los bobinados llamados interpolos.
Los polos de conmutación reducen el chisporroteo, el incremento de un bobinado en serie
con la armadura reducirá la intensidad de la corriente por el inducido.
Esto se reflejará en una pérdida de torque y velocidad es decir pérdida de potencia.
En los camiones DC, se emplean cuatro juegos para derivar la corriente en forma
correspondiente al número de polos.
A su vez cada porta escobillas lleva ocho carbones para disminuir la corriente por carbón.
El colector está dividido en pequeños bloques para facilitar la circulación de aire durante la
conmutación y mantener limpia la zona de colector sobre la que está el carbón.
29

El sensor de temperatura está instalado en el bobinado de campo, sobre una de las bobinas
del estator. La información de temperatura corresponde entonces al devanado estatórico.
El motor de tracción DC puede trabajar como generador pero se requiere dos condiciones:
mantener la corriente de campo que también se llama excitación de campo y mover la
armadura con una fuerza exterior.
Sin esta corriente la generación no es posible, es válido también este criterio para los
motores de corriente alterna.
El comportamiento del motor se establece en un plano de cuatro cuadrantes de acuerdo al
sentido del torque y giro. Es importante establecer el desempeño del motor del camión allí.
Para invertir el giro de un motor de tracción es necesario invertir la polaridad de la
alimentación DC del motor en uno de los devanados campo o armadura. En los camiones
con motores DC se invierte el campo con el contactor “Reverser”.
30

CAPITULO V
RESISTENCIA DE FRENADO Y SOPLADORES
5.1 Resistencia de frenado
Las resistencias son dispositivos de bajo valor óhmico y de alta potencia empleados para
disipar el calor desarrollado durante el retardo dinámico. Inicialmente en el retardo toda la
resistencia está en el circuito. A medida que el camión desacelera se accionan los
contactores de rango extendido, cortocircuitando porciones de la resistencia total para
mantener la corriente de armadura alta.
Figura Nº 18. Resistencia de frenado
31

Fuente: Manual Komatsu
El retardo dinámico se usa para reducir la velocidad del camión durante una operación
normal o para controlar la velocidad al bajar por una pendiente. La función del retardo
dinámico del sistema eléctrico CC es controlada por el operador activando el pedal
retardador y/o ajustando el RSC (Control de Velocidad del Retardador) en el panel de
instrumentos. El Retardo Dinámico se activa automáticamente si la velocidad del camión
excede el valor del parámetro de sobre velocidad.
Cuando el circuito de retardo dinámico se activa, los motores de tracción actúan como
generadores. El movimiento del camión causa que las ruedas motorizadas roten, generando
una salida de corriente continua que se aplica a las resistencias de retardo. Esta carga, se
opone a la rotación de la armadura para disminuir la velocidad de camión
Las resistencias están en paralelo provocando que cuando se necesita más corriente para
el frenado los contactores cierran el circuito instalando más resistencias en paralelo,
produciendo que el motor de tracción frene. Si observamos el esquema de conexiones
notamos que las resistencias están conectadas en paralelo pero que son finalmente dos
grupos de resistencias en serie.
Al cerrarse los contactores RP se van puenteando las resistencias que se encuentran entre
los terminales de cada contactor.
32

Figura Nº 19. Parrilla de 18 elementos y 3 pasos.
Fuente: Manual Komatsu
5.2 Sopladores
Son motores de corriente continua con excitación serie que enfrían las parrillas de frenado
durante el retardo.
Funcionan en base a la caída de tensión desarrollada entre las parrillas a medida que fluye
la corriente de retardo.
33

Figura Nº20. Motor DC, soplador
Fuente: Manual Komatsu
34