- 제 3 장 범퍼로봇 (bumper robot) -
DESCRIPTION
- 제 3 장 범퍼로봇 (Bumper Robot) -. - 터치 센서 (Touch Sensor) -. - 터치 센서 설정하기 -. Port S1 의 Name 에 touch 를 입력한다 . ( 편의상 touch 라고 입력하였다 . 다른 이름도 가능하다 .). - 터치 센서를 누르면 소리가 나는 로봇 -. SensorValue() 함수 : 이름 ( 센서명 ) 을 지정한 센서로 부터 값을 읽어 들인다 . - PowerPoint PPT PresentationTRANSCRIPT
- - 제 제 33 장 범퍼로봇장 범퍼로봇 (Bumper (Bumper Robot) - Robot) -
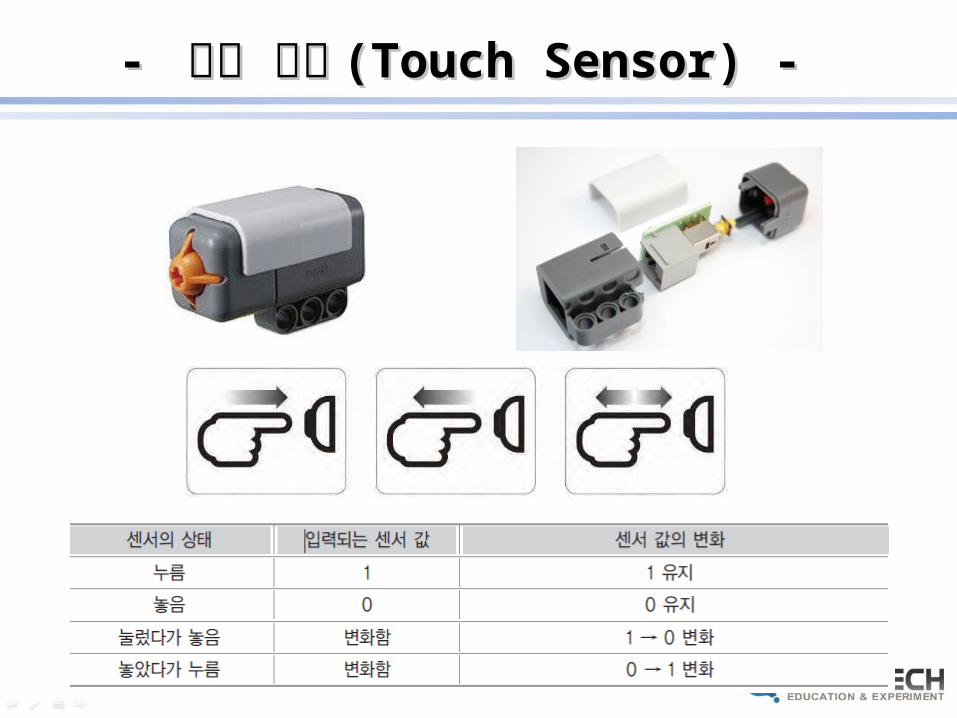
- - 터치 센서터치 센서 (Touch Sensor) - (Touch Sensor) -
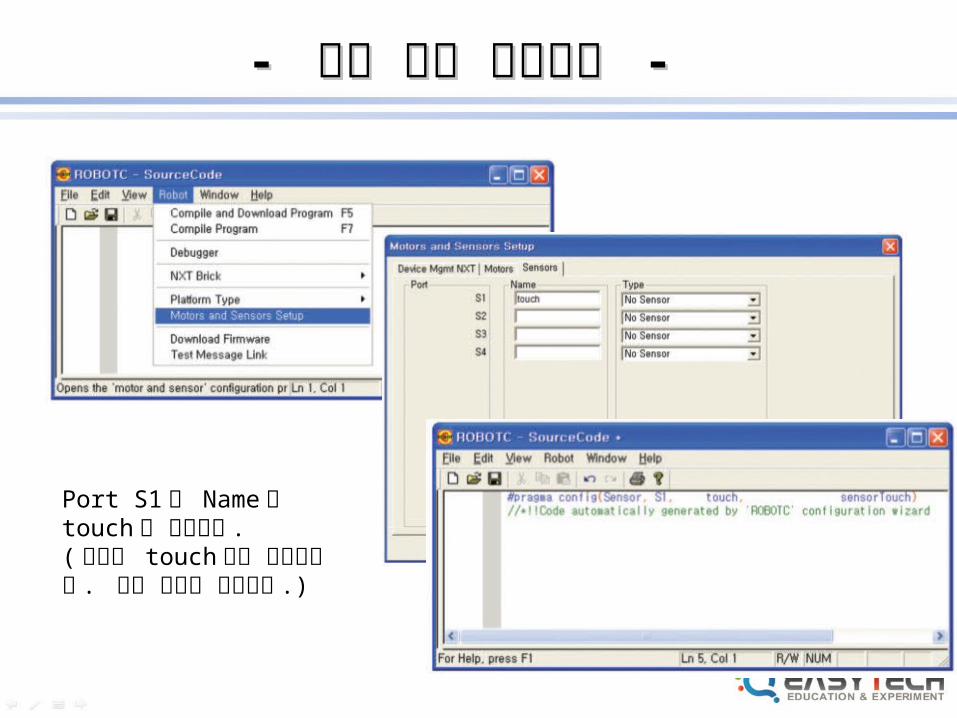
- - 터치 센서터치 센서 설정하기 설정하기 - -
Port S1 의 Name 에 touch 를 입력한다 .( 편의상 touch 라고 입력하였다 . 다른 이름도 가능하다 .)
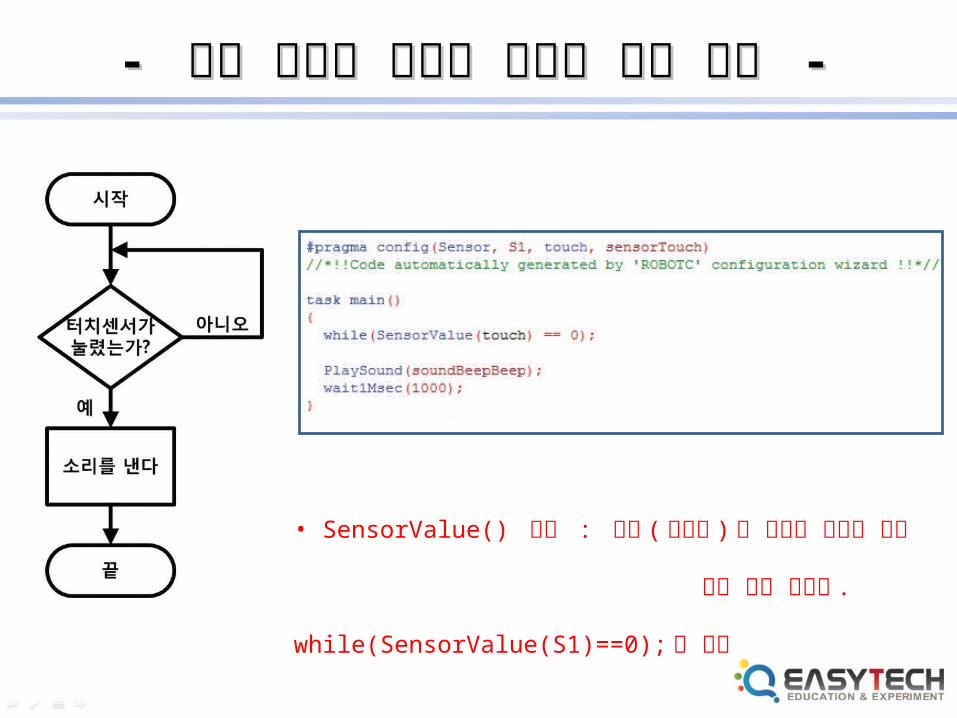
- - 터치 센서를 누르면 소리가 나는 로봇 터치 센서를 누르면 소리가 나는 로봇 --
• SensorValue() 함수 : 이름 ( 센서명 ) 을 지정한 센서로 부터 값을 읽어 들인다 . while(SensorValue(S1)==0); 도 가능

- - 터치 센서를 누르는 동안 전진하는 로봇 터치 센서를 누르는 동안 전진하는 로봇 - -
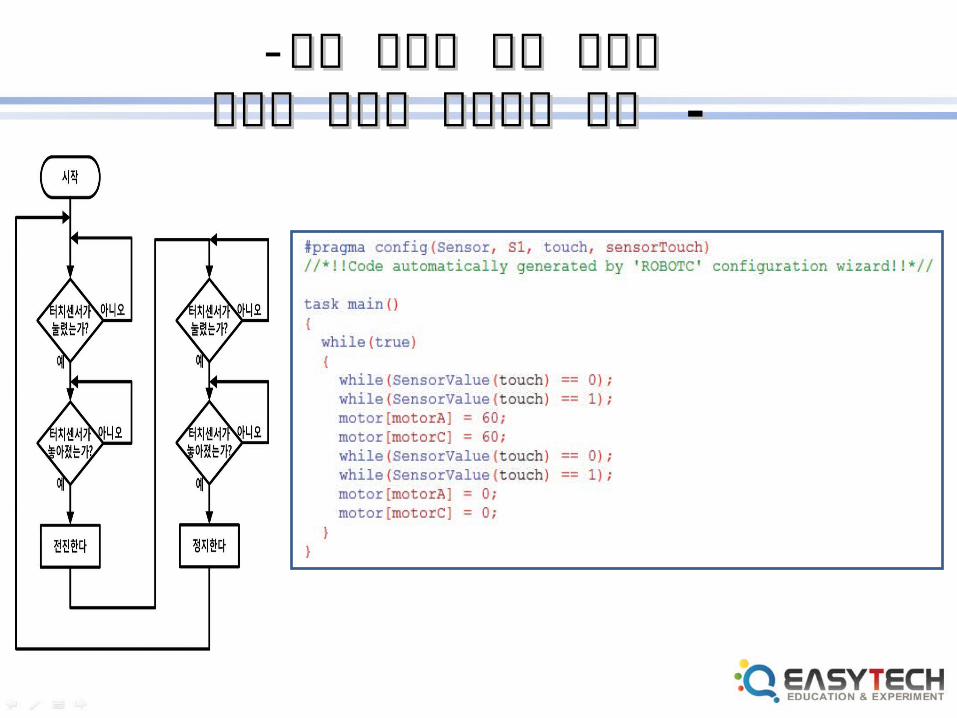
-터치 센서를 누를 때마다 터치 센서를 누를 때마다 전진과 멈춤을 반복하는 로봇 전진과 멈춤을 반복하는 로봇 - -

- - 도전 과제도전 과제 ⅡⅡ - -
• 터치 센서를 누르기 전까지 전진을 하다가 누르게 되면 1 초간 후진과 우 회전을 하는 로봇

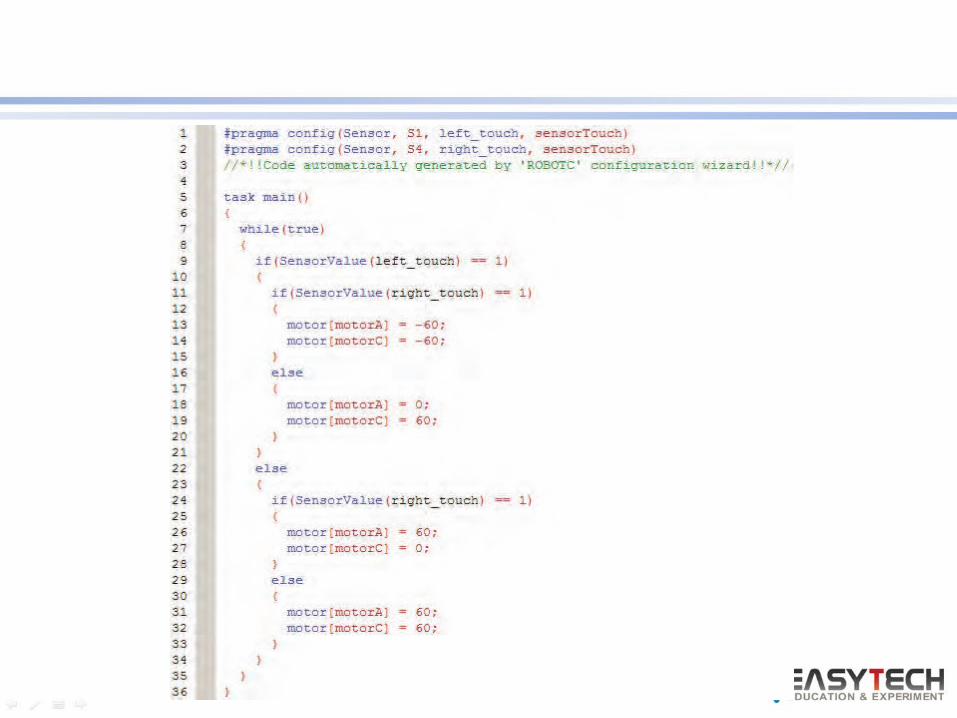
- - 도전 과제도전 과제 IIIIII - -
- - 도전 과제도전 과제 IVIV - -
범퍼카 만들기• NXT 로봇 앞뒤에 터치 센서 부착• 충돌이 감지되었을 경우
랜덤함수를 이용하여 좌측 혹은 우측으로 장애물 회피 충돌후 반대 방향으로 전진
• 앞의 과정을 반복