universiteti i tiranËs fakulteti i shkencave tË … · universiteti i tiranËs fakulteti i...
TRANSCRIPT

UNIVERSITETI I TIRANËS
FAKULTETI I SHKENCAVE TË NATYRËS DEPARTAMENTI I MATEMATIKËS
DISERTACION
PËR MARRJEN E GRADËS SHKENCORE
DOKTOR
ANALIZË KRAHASUESE E TEKNIKAVE BAZË PËR
ZGJIDHJEN E PROBLEMIT KUFITAR DHE KONTRIBUT NË
ZGJIDHJEN NUMERIKE TË DISA PROBLEMEVE SPECIALE
TË RENDEVE TË LARTA
Paraqitur nga:
M.Sc. Bendise (HUTI) HOXHA
Udhëheqës shkencor:
Prof. As. Dr. Flora OSMANI
Tiranë, 2016

ii
UNIVERSITETI I TIRANËS FAKULTETI I SHKENCAVE TË NATYRËS
DEPARTAMENTI I MATEMATIKËS
Disertacion
I
Paraqitur nga
M.Sc. Bendise Hoxha
Për marrjen e gradës shkencore
DOKTOR
Programi i studimit : Analizë dhe Algjebër
Tema : ANALIZË KRAHASUESE E TEKNIKAVE BAZË PËR
ZGJIDHJEN E PROBLEMIT KUFITAR DHE KONTRIBUT NË
ZGJIDHJEN NUMERIKE TË DISA PROBLEMEVE SPECIALE
TË RENDEVE TË LARTA
Udhëheqës Shkencor: Prof. Asoc. Dr. Flora Osmani
Mbrohet më dt _____. _____. _______. para jurisë:
1. ______________________________________Kryetar
2. ______________________________________Anëtar (oponent)
3. ______________________________________Anëtar (oponent)
4. ______________________________________Anëtar
5. ______________________________________Anëtar

iii
PARATHËNIE
Së pari, dua të shpreh mirënjohjen time të sinqertë për Prof. Asoc. Flora Osmani për
mbështetjen e vazhdueshme të saj në procesin e gjatë të studimit dhe kërkimit.
Falënderimet e mia të sinqerta shkojnë për të gjithë stafin akademik të Departamentit
të Matematikës në Fakultetin e Shkencave të Natyrës të UT. Dua të falenderoj
bashkëpuntorët dhe bashkëautorët e mi në studime e botime, Prof. Lulezim Hanelli
dhe Dr. Adrian Naço për ndihmën e tyre të shumëanshme dhe bashkëpunimin e
frytshëm në shumë aspekte. Falënderoj përzemërsisht stafin e SHPU "Matematikë e
Zbatuar", ku mora formimin e specializuar dhe krijova bazat për kërkim e punë të
pavarur. Dua të falënderoj përzemërsisht shokët dhe miqtë e mi të Departamentit të
Matematikës në Fakultetin e Shkencave të Natyrës të Universitetit "Luigj Gurakuqi"
për mbështetjen dhe motivimin e pakursyer gjatë kohës së studimit. Në fund dua të
falenderoj familjen time dhe prindërit e mi për durimin dhe mbështetjen e pakursyer.
…..edhe një herë FALEMINDERIT të gjithëve......

iv
PËRMBLEDHJE
Në fillim trajtohen disa raste tipike problematike të integrimit numerik në ekuacionet diferenciale të
zakonshme. Më tej analizohen në hollësi teknikat themelore të zgjidhjes së problemit kufitar,
konkretisht: a) Teknikat numerike të tipit goditje dhe MDF b) Teknikat Numerike-Analitike të tipit
FEM, Rayleigh-Ritz dhe Galerkin. Zgjidhen në mënyrë paralele disa shembuj që modelojnë zbatime
inxhinierike dhe vlerësohen metodat e përdorura në bazë të rezultateve të tyre.
Zgjidhje numerike është zhvilluar për një problem valor me shuarje kufitare që modelon
fenomenin fizik të lëkundjeve të linjave të tensionit të lartë. Modeli fizik është ai i një korde, njëri skaj i
së cilës është i fiksuar, kurse skaji tjetër i lidhur me një sistem dashpot. Modeli matematik është
problem valor i vlerave fillestare-kufitare në ekuacionet hiperbolike jolineare me kushte kufitare
joklasike. Për të zgjidhur problemin është përdorur metoda e karakteristikave e kombinuar me teknikën
e përafrimit Richardson. Metoda e propozuar përmirëson në mënyrë esenciale saktësinë e metodës
klasike të karakteristikave. Rezultate numerike janë paraqitur.
Skema Runge-Kutta të tipit të diferencave eksponenciale dhe teknika të përafrimeve spektrale
janë përshtatur për të zgjidhur ekuacionin e përgjithshëm Burgres-Korteweg-de Vries. Metoda
spektrale e transformon problemin diferencial fillestar në një sistem stiff ekuacionesh diferenciale të
zakonshme. Ky i fundit zgjidhet me anën e skemave Runge-Kutta të tipit të diferencave eksponenciale.
Studjohet si një çështje e rëndësishme dhe e pashmangshme qëndrueshmëria e këtyre skemave deri tek
rendi 4 i tyre dhe pastaj tregohet se ekuacioni i përgjithshëm Burgers-Korteweg-de Vries mund të
zgjidhet me metodat Runge-Kutta të diferencave eksponenciale të rendeve 3 ose 4. Metoda e propozuar
është implementuar në Matlab dhe disa rezultate numerike janë paraqitur.
Fjalë kyçe: Ekuacion Stiff; Problem i Vlerës fillestare dhe Problem i Vlerave të Veta; Ekuacion
Valor; Shuarje Kufitare; Ekstrapolimi i Richardson-it; Skema Runge-Kutta Diferenciale
Eksponenciale; Ekuacioni Burgers-Korteweg-de Vries; Përafrime Spektrale.
ABSTRACT
Some typical problematic cases in ODEs are analyzed first. Then the basic techniques for the solution
of the boundary value problem are analyzed in details, namely: a) Numerical techniques: Shooting
Type and FDM. b) Analytical-Numerical techniques of FEM type, Rayleigh-Ritz and Galerkin method.
Several typical examples derived from engineering applications are solved in a parallel manner and
the results are compared to estimate each of the methods used.
Numerical solution is developed for a wave equation with boundary damping arising in the
study of the physical phenomena of the oscillations that occur in overhead power transmission lines.
The physical model is that of a string which is fixed at one end and the other end is attached to a
dashpot system. The mathematical model is an initial-boundary value problem for a weekly nonlinear
hyperbolic differential equation with non-classical boundary conditions. The method of the
characteristics in combination with Richardson extrapolation is used to solve the problem. The
acurracy of the classic characteristic method is essentialy improved. Numerical results are reported.
Exponential time differencing-Runge-Kutta schemes with spectral approximations are extended
to deal with the generalized Burgers-Korteweg-de Vries equation. The problem is reduced to a stiff
system of ordinary differential equations that is solved by combinations of exponential time
differencing and Runge-Kutta schemes. The stability properties of these last are discussed. Then it is
shown that it is convenient to solve the difficult Burgers-Korteweg-de Vries problem by third- or
fourth-order exponential time differencing Runge-Kutta schemes. Numerical results are presented.
Keywords: Stiff Equation, Boundary Value and Eigenvalue Problem, Wave Equation, Boundary
Damping, Characteristics Curves, Richardson Extrapolation, Exponential Time Differencing and
Runge-Kutta Schemes; Burgers-Korteweg-de Vries Equation; Spectral Approximations.

v
PËRMBAJTJA E LËNDËS
PARATHËNIE.................................................................................................
iii
PËRMBLEDHJE…………………………………………………………….
iv
LISTA E FIGURAVE.......................................................................................
vii
LISTA E TABELAVE......................................................................................
ix
HYRJE: Shtrimi i problemeve në ekuacionet diferenciale dhe objekti i këtij
studimi.................................................................................................................
x
KAPITULLI 1
Disa raste tipike problematike të integrimit numerik në ekuacionet
diferenciale të zakonshme...................................................................................
1
1.1 Keqkushtëzimi i një sistemi diferencial........................................................ 2
1.2 Ekuacionet diferenciale stiff......................................................................... 3
1.3 Ekuacionet diferenciale me vlerë të vet pranë boshtit imagjinar.................. 4
1.4 Ekuacionet diferenciale me vlerë të vet dominante të madhe në kuadratin e
parë..................................................................................................................
5
1.5. Rezultate numerike...................................................................................... 6
1.6. Disa rekomandime për trajtimin e rasteve problematike të integrimit.........
8
KAPITULLI 2
Analizë krahasuese e metodave numerike për zgjidhjen e problemeve kufitare 9
2.1 Një formulim i përgjithshëm i problemeve diferenciale............................... 9
2.2 Metodat numerike për zgjidhjen e problemeve diferenciale......................... 10
2.3 Formulimi matematik i problemeve kufitare në ekuacionet diferenciale të
zakonshme...........................................................................................................
11
2.4 Disa probleme tipike inxhinierike që modelohen me anën e problemeve
kufitare................................................................................................................
13
2.4.1 Përkulja e një trau me skaje të fiksuara........................................ 13
2.4.2 Studimi i presioneve mbi një tra………………………………... 14
2.4.3 Ekuacionet e Euler-Bernoull-it..................................................... 14
2.5 Metodat numerike bazë për zgjidhjen e problemeve kufitare....................... 15
2.5.1 Metodat numerike të tipit goditje……………………………….. 15
2.5.1.1 Metoda e goditjes - rasti linear………………………… 15
2.5.1.2 Metoda e goditjes - rasti jolinear………………………. 17
2.5.1.3 Metoda e goditjes për problemin e vlerës kufitare (2.7).. 18
2.5.1.4 Metoda e goditjes shumëfishe…………………………. 19
2.5.2 Metoda të diferencave të fundme për zgjidhjen e problemeve të
vlerës kufitare.........................................................................................
22
2.5.2.1 Rasti linear....................................................................... 22
2.5.2.2 Rasti jolinear................................................................... 23
2.5.2.3 Metodat e diferencave të fundme të rendeve të larta...... 23
2.5.2.4 Metoda e diferencave të fundme për ekuacionet
diferenciale të rendeve të larta....................................................
24
2.5.3 Metoda të posaçme për zgjidhjen e problemeve kufitare Euler-
Bernoull..................................................................................................
25
2.5.3.1 Formulimi i problemit kufitar të vlerave të veta në

vi
ekuacionin e përgjithshëm Euler-Bernoull................................. 25
2.5.3.2 Një metodë numerike e rendit të dytë për zgjidhjen e
problemit Euler-Bernoull............................................................
27
2.5.3.3 Një metodë numerike e rendit të katërt për zgjidhjen e
problemit Euler-Bernoull............................................................
28
2.5.3.4 Një metodë numerike e tipit goditje për zgjidhjen e
problemit Euler-Bernoull............................................................
29
2.5.3.5 Eksperimente numerike.................................................. 31
2.5.4 Metoda e elementëve të fundëm për zgjidhjen e problemeve
kufitare...................................................................................................
35
2.5.4.1 Parime të përgjithshme të zgjidhjes së përafërt............... 35
2.5.4.2 Parime të përgjithshme të metodës së elementëve të
fundëm - kontekst një – përmasor...............................................
39
2.5.4.3 Zgjidhja e problemit kufitar me metodën Galerkin......... 42
2.5.4.4 Analizë krahasuese e metodave bazë nëpërmjet
eksperimentit numerik.................................................................
43
2.5.4.5 Zgjidhja e problemit kufitar (2.8) - (2.9) me Metodën
Rayleigh – Ritz............................................................................
45
KAPITULLI 3
Zgjidhje numerike për dy probleme kufitare-fillestare speciale ........................ 52
3.1 Zgjidhje numerike e një ekuacioni valor që modelon lëkundjet e linjave të
tensionit të lartë..................................................................................................
52
3.1.1 Shtrimi dhe formulimi matematik i problemit.............................. 52
3.1.2 Zgjidhje numerike për problemin valor (3.1-3.5)......................... 56
3.1.3 Rezultate numerike....................................................................... 59
3.1.4 Shtrirja e rezultateve dhe disa përfundime.................................... 60
3.2 Zgjidhje numerike për ekuacionin e përgjithshëm Burgers-Korteweg-de
Vries....................................................................................................................
63
3.2.1 Hyrje.............................................................................................. 63
3.2.2 Skema eksponenciale diferenciale Runge-Kutta e rendit të katërt 64
3.2.3 Studimi i zonave të qëndrueshmërisë............................................ 65
3.2.4 Eksperimente numerike.................................................................
69
PËRFUNDIME-REKOMANDIME................................................................
74
BIBLIOGRAFIA...............................................................................................
76
SHTOJCË...........................................................................................................
80

vii
LISTA E FIGURAVE
Figura 1.1: Integrimi numerik i sistemit (1.1) në dy rastet a dhe b dhe
zgjidhja teorike y1 = 3e-2x
...............................................................
3
Figura 1.2: Integrimi numerik i ekuacionit (1.2) - majtas dhe (1.3) –
djathtas............................................................................................
7
Figura 2.1: Përkulja e traut me skaje të fiksuara............................................... 13
Figura 2.2: Funksionet e formës për segmentin [a,b] me 5 elementë................ 39
Figura 2.3: Funksioni u(x) dhe interpolanti splain i tij UM(x).......................... 41
Figura 2.4: Krahasimi i zgjidhjes teorike me atë të MDF për problemin
(2.91)...............................................................................................
45
Figura 2.5: K-kubiku tipik Si............................................................................ 48
Figura 2.6: Funksionet bazë skajorë 0, 1, n, n+1 ........................................ 49
Figura 3.1: Proceset (P,Q,R), (Q,T,S) dhe (R,T,V)............................................ 57
Figura 3.2: Kurbat karakteristike të ekuacionit (3.1) dhe rrjetat nyjore G0 dhe
G1....................................................................................................
59
Figura 3.3: Zhvendosja u përkundrejt x dhe t për φ(x)=0.1sin(0.5x),
ψ(x)=0.05sin(0.5x) dhe ϵ=0.1.........................................................
61
Figura 3.4: Zhvendosja u përkundrejt x dhe t për φ(x)=2.5sin(3.5x),
ψ(x)=0.05sin(3.5x) dhe ϵ=0.1.........................................................
61
Figura 3.5: Zhvendosja u përkundrejt x dhe t për φ(x)=0.01x3e
-3x/π,
ψ(x)=0.2x(π-x) dhe ϵ=0.1...............................................................
62
Figura 3.6: Zhvendosja u përkundrejt x dhe t për φ(x)=x+sin(x), ψ(x)= x(π-
x) dhe ϵ=0.1.....................................................................................
62
Figura 3.7: Zonat e qëndrueshmërisë për skemat RK4 dhe ETDRK4 në
planin kompleks të për disa vlera negative të ndryshme
............................................................................................
68
Figura 3.8: Kufijtë e zonave të qëndrueshmërisë për: ETDRK2, ETDRK3,
ETDRK4 (a) y = -18i, (b) y = 18i..................................................
68
Figura 3.9: Zonat e qëndrueshmërisë : ETDRK2, ETDRK3, ETDRK4: (a)y
= -4 (b) y = -9.................................................................................
69
Figura 3.10: Zonat e qëndrueshmërisë: ETDRK2 , ETDRK3, ETDRK4,
ETD1, ETD2 (a) y = -9 (b) y = -15.................................................
69
Figura 3.11: Vala solitare për x nga -π deri në π dhe t nga 0 deri në t = 20...... 70

viii
Figura 3.12: Evolucioni kohor i profileve të zgjidhjes së (3.31) - (3.32)……… 71
Figura 3.13: Saktësia përkundrejt hapit të kohës h për zgjidhjen e B-KdV
(3.31) - (3.32) me skemat ETDRK2, ETDRK3 dhe
ETDRK4. Zgjidhja referente e realizuar nga ode 15s…………….
72
Figura 3.14: Saktësia përkundrejt kohës së harxhuar për zgjidhjen e (3.31) -
(3.32) me anën e ETDRK3 dhe ETDRK4. Zgjidhja referente e
realizuar me ode 15s……………………………………………...
72
Figura 3.15: Krahasimi midis zgjidhjes ekzakte të B-KdV (3.31) - (3.32) dhe
një zgjidhje me ETDRK4, h=10-4
, llogaritur në t=10-3
...................
73

ix
LISTA E TABELAVE
Tabela 1.1: Rezultatet për ekuacionin (1.2).......................................................... 7
Tabela 1.2: Rezultatet për ekuacionin (1.3).......................................................... 7
Tabela 2.1: Paraqitja e gabimeve relative për h=2-m
të shembullit 2.1 sipas
metodës së [10]...................................................................................
32
Tabela 2.2: Metoda e rendit të dytë për llogaritjen e vlerës vetjake më të vogël
në shembullin 2.1...............................................................................
33
Tabela 2.3: Metoda e rendit të katërt për llogaritjen e vlerës vetjake më të
vogël në shembullin 2.1.....................................................................
33
Tabela 2.4: Metoda e rendit të dytë dhe e rendit të katërt për llogaritjen e vlerës
vetjake më të vogël në shembullin 2.1...............................................
34
Tabela 2.5: Gabimet sipas normës L të tri metodave bazë të integrimit
numerik...............................................................................................
44

x
HYRJE
SHTRIMI I PROBLEMEVE NË EKUACIONET DIFERENCIALE
DHE OBJEKTI I KËTIJ STUDIMI
Mjaft modele në shkencat natyrore dhe ato teknike - inxhinierike paraqiten me
ekuacione diferenciale të zakonshme (EDZ) të formës
у'= f(x,y), f:R RⁿRⁿ (1)
Rast i veçantë i sistemit (1) është ekuacioni diferencial i rendit n i formës:
y⁽ⁿ⁾ = g(x,y,y',…,y(n-1)
), g:RxRⁿ R (1')
Ndër problemet që shtrohen për sistemin (1) apo ekuacionin (1') më të zakonshëm
janë:
a) – Problemi i vlerës fillestare që për sistemin (1) shkruhet në formën
y' =f(x,y), y(x₀) =y₀ (2)
b) – Problemet e vlerës kufitare, zakonisht me dy pika që karakterizohen nga një
mori formulimesh. Këtu shquhen një klasë problemesh me rëndësi të posaçme në
zbatime praktike që kanë të bëjnë me ekuacionin diferencial të rendit të dytë:
y''= g(x,y,y') (3)
c) – Problemet e zgjidhjeve periodike që gjithashtu kanë nje mori formulimesh e që
shpesh reduktohen në probleme kufitare
d) –Problemet e vlerave të veta që janë një zgjerim apo përgjithësim i problemeve
kufitare e periodike
Çështja e ekzistencës dhe unicitetit të zgjidhjes për problemin a) – (1)-(2) zgjidhet në
mënyrë globale nëpërmjet teoremës Pikar ndërsa për problemet e tjera b), c), d) kjo
çështje në përgjithësi është e ndërlikuar dhe literatura matematike siç do të shikohet
më poshtë ofron vetëm zgjidhje të veçanta e të pjesshme të problemit.
Ekuacionet diferenciale me derivate të pjesshme (EDP) padyshim që përbëjnë një nga
mjetet më të fuqishme të matematikës për studimin e proceseve fizike. Ata
karakterizohen nga një mori shume e madhe formulimesh. Metodat numerike për
zgjidhjen e përafërt të tyre morën zhvillim të vrullshëm në fillim të viteve ’60 dhe

xi
ecën paralel me zhvillimin e teknikës llogaritëse. Nga pikëpamja matematike këto
metoda u bënë një fushë e përzier e një aparati matematik ndërdisiplinor ku
ndërthuren dhe në një farë mase shkrihen me njëra-tjetrën, teoria e ekuacioneve
diferenciale, teoria e funksioneve të variablit real, analiza funksionale, analiza
numerike, informatika, teoria e fushave, teoria e elasticitetit, etj. Nga pikëpamja
praktike metodat numerike u bënë një mjet i pazëvendësueshëm për zgjidhjen e
shumë problemeve industriale dhe një zonë e hapur takimi e bashkëpunimi midis
matematicienëve, informaticienëve, fizikantëve dhe specialistëve të fushave të
ndryshme inxhinierike. Disa qindra monografi, disa dhjetëra mijë artikuj dhe një
numër i konsiderueshëm programesh informatike u janë kushtuar metodave numerike
në ekuacionet diferenciale me derivate të pjesshme.
Aparati analitik për trajtimin e problemeve diferenciale ndërsa paraqitet i fuqishem
dhe i pazëvendësueshëm në studimin e aspekteve cilësore dhe zbulimin e vetive
themelore të zgjidhjeve të tyre, në aspektin praktik të kërkimit të këtyre zgjidhjeve ai
ka më pak fuqi veprimi. Përgjithësisht trajtimet numerike paraqiten mjaft operative e
të suksesshme në zgjidhjen e problemeve diferenciale.
Ky studim ka në fokus problemin kufitar në ekuacionet diferenciale dhe
zgjidhjen numerike të disa problemeve diferenciale speciale që modelojnë zbatime të
spikatura inxhinierike. Një pjesë e mirë e teknikave numerike për zgjidhjen e
problemeve diferenciale komplekse bazohen dhe përdorin aparatin e fuqishëm të
metodave numerike për zgjidhjen e problemit të vlerës fillestare në ekuacionet
diferenciale të zakonshme (EDZ). Përmendim p.sh. kalimthi se zgjidhja e një
problemi kufitar me anën e metodës së goditjes reduktohet në zgjidhjen e
njëpasnjëshme të një serie problemesh të vlerës fillestare në EDZ. Po kështu zgjidhja
e një ekuacioni me derivate të pjesshme (EDP) me anën e metodave spektrale
reduktohet në zgjidhjen e sistemeve diferenciale të vlerës fillestare në EDZ. Në këtë
kuptim është parë e arsyeshme që në kapitullin e parë të këtij studimi të trajtohen disa
raste tipike problematike të integrimit numerik në EDZ, raste këto që ne i kemi hasur
gjatë studimit në problemet që kemi trajtuar. Konkretisht analizohen problemi i
keqkushtëzimit në ekuacionet diferenciale të zakonshme dhe i ashtëquajturi problem
stiff. Më tej analizohet rasti specifik kur jakobiani i ekuacionit diferencial ka të paktën
një vlerë të vet pranë boshtit imagjinar. Tregohet se ky rast, në mënyrë të ngjashme
me problemin stiff, krijon situata problematike gjatë integrimit të tij numerik: Numri i

xii
hapave të integrimit bëhet shumë i madh dhe kritik për llogaritjen. Jepen disa shembuj
tipikë dhe rezultate numerike për problemet e trajtuara.
Në kapitullin e dytë të studimit janë konsideruar tri metodat bazë të zgjidhjes së
problemit kufitar: 1) Metodat e tipit goditje 2) Metodat e diferencave të fundme 3)
metodat e elementëve të fundëm në dy vesionet bazë të tyre: Galerkin dhe Reylegh-
Ritz. Metodat e sipërpërmendura janë studiuar dhe analizuar në një raport krahasues
midis tyre, duke vënë në evidencë avantazhet dhe disavantazhet e secilës metodë.
Eksperimenti numerik është përdorur gjithashtu si mekanizëm testimi. Disa probleme
diferenciale kufitare që modelojnë zbatime të spikatura inxhinierike janë përdorur si
test. Implementimet dhe zgjidhjet numerike janë përkthyer në kode Matlab, një pjesë
e mirë e të cilëve janë paraqitur në shtojcën e këtij punimi.
Në kapitullin e tretë të studimit trajtohen dy probleme diferenciale speciale në
ekuacionet me derivate të pjesshme, që njëkohësisht përbëjne dhe modelime inxhinierike të
mirënjohura dhe të studiuara intensivisht në literaturën e specialitetit. Metoda dhe teknika të
posaçme numerike janë zhvilluar dhe implementuar për zgjidhjen e dy problemeve të
shtruara.
Problemi i parë është një problem diferencial valor me shuarje kufitare, që ndeshet në
studimin e fenomenit fizik të lëkundjeve në linjat e tensionit të lartë dhe në struktura të tjera
fleksible. Modeli fizik është ai i një korde, njëri skaj i së cilës qëndron i fiksuar, kurse skaji
tjetër lidhet me një sistem dashpot që gjeneron lëkundje, me koeficient shuarje të vogël.
Modeli matematik është një problem i vlerës fillestare-kufitare për një ekuacion diferencial
jolinear të dobët me kushte kufitare jo klasike. Metoda numerike e propozuar është një
kombinim i metodës së karakteristikave me teknikën e ekstrapolimit Richardson. Efektiviteti
dhe saktësia e metodës klasike të karakteristikave përmirësohet esencialisht në metodën e
propozuar.
Problemi i dytë i trajtuar ka të bëjë me ekuacionin e pёrgjithёsuar të Burgers-Korteweg-
de Vries, i mirënjohur për zbatimet e shumta në problemet valore dhe rrjedhjen e
fluideve. Zgjidhja e këtij ekuacioni me metoda të përafrimit spektral e redukton
problemin në një sistem diferencial tepër stiff në EDZ. Skemat diferenciale
eksponenciale të tipit Runge-Kutta janë implementuar për zgjidhjen e sistemeve stiff
të gjeneruar. Janë analizuar vetitë e qëndrueshmërisë së këtyre skemave dhe është
motivuar përdorimi i tyre në zgjidhjen e problemit. Më tej janë implementuar
konkretisht këto skema dhe është demonstruar efektiviteti i tyre në zgjidhjen e
ekuacionit të pёrgjithёsuar Burgers-Korteweg-de Vries duke ballafaquar rezultatet
numerike me zgjidhjet ekzakte.

1
KAPITULLI 1
Disa raste tipike problematike të integrimit numerik
në ekuacionet diferenciale të zakonshme
Sikurse u përmend në hyrje të këtij punimi një pjesë e mirë e teknikave numerike për
zgjidhjen e problemeve diferenciale komplekse bazohen dhe përdorin aparatin e
fuqishëm të metodave numerike për zgjidhjen e problemit të vlerës fillestare në
ekuacionet diferenciale të zakonshme (EDZ). Por në shumë zbatime praktike
problemi i vlerës fillestare në EDZ has në vështirësi serioze. Veçanërisht problemet
që gjenerohen nga metodat numerike të tipit goditje për zgjidhjen e problemit kufitar:
f(x, y, y’, y’’) = 0, y(a) = A, y(b) = B, shpesh janë numerikisht të paqëndrueshëm.
Në disa raste problemi i vlerës fillestare mund të jetë i keqkushtëzuar. Rafinimi dhe
sofistikimi i teknikave numerike që përdoren nga njëra anë dhe rritja e precizionit
komjuterik nga ana tjetër, janë dy alternativat në këto raste, sigurisht për të zgjidhur
problemet me keqkushtëzim të moderuar. Një rast tjetër problematik ndodh kur
zgjidhja e ekuacionit diferencial ka dy komponente me ritme ndryshimi tepër të
çproporcionuara. Ky rast njihet në literaturë me emrin stiff dhe është analizuar
gjërësisht ([1], [2], [3]). Një rast tjetër specifik është kur jakobiani i sistemit
ekuivalent me ekuacionin diferencial ka të paktën një vlerë të vet pranë boshtit
imagjinar. Zgjidhja e ekuacionit diferencial lëkundet me frekuencë të lartë. Në punim
tregohet se situata numerike që krijohet në pikëpamje të shpejtësisë së integrimit është
mjaft e ngjashme me rastin stiff, por paraqitet shumë më problematike përsa i përket
arritjes së saktësisë së kërkuar të zgjidhjes. Rasti që haset më dendur është kur
jakobiani i sistemit diferencial e ka vlerën e vet dominante me pjesë reale pozitive dhe
pjesë imagjinare të madhe. Në këto raste zgjidhja e problemit të vlerës fillestare rritet
vrullshëm dhe njëkohësisht lëkundet me frekuencë të lartë. Teknika të posaçme mund
të përdoren për të zbutur efektet numerike negative, por përgjithësisht duhet shmangur
përdorimi i problemeve të tilla të vlerës fillestare.
Shembuj tipikë janë qëmtuar për të analizuar disa nga fenomenet dhe problemet
e përmendura më sipër. Kodi Matlab ODE45 është përdorur për thjeshtësi për
zgjidhjen e të gjitha problemeve të vlerës fillestare të gjeneruara.

2
1. 1 Keqkushtëzimi i një sistemi diferencial
Klasa e ekuacioneve diferenciale që trajtohet në këtë pikë përbën një rast të veçantë
përsa i përket zgjidhjes numerike. Metodat e zakonshme numerike janë të pavlefshme
për ekuacionet e kësaj klase. Konsiderojmë p.sh. sistemin e thjeshtë diferencial
y1’ = 2y2, y2’ = 2y1, (1.1)
zgjidhja e përgjithshme e të cilit është
y1 = c1e2x
+ c2e-2x
, y2 = c1e2x
- c2e-2x
.
Për kushtet fillestare y1(0) = 3 dhe y2(0) = -3 me lehtësi gjendet që c1 = 0 dhe c2 = 3,
kështu që zgjidhja e veçantë që plotëson këto kushte është
y1 = 3e-2x
, y2 = -3e-2x
.
Zgjidhja e mësipërme zvogëlohet me shpejtësi me rritjen e x, por është e qartë se sapo
të bëhet gabimi i parë numerik, futja në zgjidhje e komponentes c1e2x
me eksponent
pozitiv do të jetë e pashmangshme. Komponentja e mësipërme do të fillojë të
dominojë me shpejtësi mbi zgjidhjen teorike. Keqkushtëzimi i një ekuacioni
diferencial është shkak i pashmangshëm i paqëndrueshmërisë thelbësore të zgjidhjes
numerike të tij.
Në eksperimentin e mëposhtëm numerik kushti fillestar y1(0) = 3 është
ndryshuar respektivisht me eps = 3*10-16
njësi (rasti a) dhe eps = 2*10-16
njësi (rasti b)
dhe është integruar numerikisht sistemi (1.1) në segmentin [0 4] në të dy rastet.
Rezultatet e integrimit për komponenten y1 të zgjidhjes janë paraqitur grafikisht ne
figurën 1. Zgjidhja teorike y1 = 3e-2x
është mbivendosur në stilin pika-pika për
krahasim mbi zgjidhjen numerike (të paraqitur me vijë të vazhduar), në secilin grafik.
Nga grafiku i figurës 1 - rasti a, vihet re qartë destabilizimi i zgjidhjes numerike që
fillon dhe shfaqet vrullshëm rreth pikës x = 3.5. Shkaku nuk është numerik, as
kompjuterik. Ai është problem i brendshëm i vetë sistemit (1.1). Mënyra e vetme për
të shmangur destabilizimin numerik të zgjidhjes në rastin a, është rritja e precizionit
matlabik. Ndërkaq, precizioni i dyfishtë matlabik që është përdorur për kryerjen e
llogaritjeve në të dy rastet, është i mjaftueshëm për të shmangur destabilizimin
numerik të zgjidhjes në rastin b: Zgjidhja numerike përputhet me zgjidhjen teorike të
ekuacionit dhe në grafik ato duken si një vijë e vetme.

3
Figura 1.1: Integrimi numerik i sistemit (1.1) në dy rastet a dhe b dhe zgjidhja teorike
y1 = 3e-2x
1.2. Ekuacionet diferenciale stiff
Konsiderojmë ekuacionin diferencial
y'' + (1 + 10m
)y' + 10m
y = f(x), y(0) = y0, y'(0) = y'0, m = 1, 2, 3, ..., (1.2)
zgjidhja e përgjithshme e të cilit është:
Y = c1e-x
+ c2e-vx
+ G(x) = T(x) + G(x),
ku c1 dhe c2 janë konstante që varen nga kushtet fillestare y0 and y'0, kurse v = 10m
.
është e qartë se pas një intervali kohe x1 e ashtëquajtura zgjidhje kalimtare T(x)
shuhet dhe zgjidhja Y(x) konvergjon tek e ashtëquajtura zgjidhje e qëndrueshme G(x).
Kjo e fundit varet nga ana e djathtë f(x) e ekuacionit (1.2). Në shumë zbatime
inxhinierike ekuacioni (1.2) integrohet në një segment [0 x2], ku x2 > x1.
Për të integruar një zgjidhje të formës ce
me një saktësi të dhënë shumica e
procedurave standarde të integrimit numerik vendosin mbi hapin e integrimit h një
kufizim të formës h < k/ | | , ku k është konstante karakteristike e metodës së
përdorur. Në përgjithësi është vlera e vet dominante e Jakobianit që i korrespondon
ekuacionit diferencial që zgjidhet, kështu që në rastin e ekuacionit (1.2) kufizimi i
mësipërm merr formën h < k/v. Komponentja c2e-vx
e zgjidhjes shkon me shpejtësi
në zero dhe pas një intervali të shkurtër kohe ajo nuk ka influencë mbi zgjidhjen, por
kufizimi i fortë h < k/v është i domosdoshëm të zbatohet në gjithë segmentin e
integrimit. Ndërkaq komponentja tjetër e zgjidhjes, c1e-x
, shkon në zero relativisht
ngadalë, kështu që segmenti [0 x1], (për rrjedhojë edhe segmenti [0 x2] është

4
relativisht i madh. Numri i hapave të integrimit është proporcional me madhësinë
mx2, kështu që ky numër rezulton shumë i madh dhe kritik për llogaritjet. Ekuacioni
diferencial (1.2) është stiff dhe parametrin v = 10m
mund ta konsiderojmë si koefiçient
që shpreh shkallën e qënies stiff të tij. Vemë në dukje se për sistemin e çfarëdoshëm
diferencial y' = f(x, y) shkalla e qënies stiff në pikën e çfarëdoshme (x, y) matet me
raportin:
ix I
ix I
min Re( (x, ))
max Re( (x, ))
y
y
,
ku λ1, λ2, ...., λn janë vlerat e veta të matricës jakobiane f'y.
Kuptohet se nga qënia stiff e një sistemi në pikën (x, y) rrjedh se ai është i tillë në një
zonë rrethuese të pikës (x, y). Vërejmë që matrica f'y mund të ndryshojë shumë gjatë
segmentit të integrimit, kështu që shkalla e qënies stiff në përgjithësi është shumë
dinamike.
1.3. Ekuacione diferenciale me vlerë të vet pranë boshtit imagjinar
Konsiderojmë problemin e vlerës fillestare
y'' + 2y' + (1 + v2)y = f(x), y(0) = y0, y'(0) = y'0, v >> 0. (1.3)
Ekuacioni karakteristik që i korrespondon ekuacionit diferencial (1.3) i ka rrënjët
= -1 ± v (të cilat sipas supozimeve të bëra ndodhen pranë boshtit imagjinar).
Kështu zgjidhja e përgjithshme e ekuacionit (1.3) është:
Y = e-x
(c1cosvx + c2sinvx) + G(x) = T(x) + G(x),
ku c1 dhe c2 janë konstante që varen nga kushtet fillestare y0 and y'0, kurse T(x) dhe
G(x) si më parë, shënojnë respektivisht zgjidhjen kalimtare dhe zgjidhjen e
qëndrueshme. Zgjidhja kalimtare T(x) mund të shkruhet në formën e thjeshtuar
xT(x)=ce sin(vx+α) , (1.4)
ku c dhe α janë konstante që varen nga kushtet fillestare y0 and y'0. Zgjidhja T(x)
lëkundet me periodë x2πp= , amplitudë ce dhe fazë α.
v
Për të paraqitur një sinjal sinusoidal si ai i formës (1.4), duhet të jepen të paktën
pikat ekstremale të tij. Për saktësi numerike është e arsyeshme të supozohet se rreth

5
10 fishi i kësaj sasie pikash është e nevojshme të dihen. Nga pohimi i fundit rrjedh
mosbarazimi 2π
20h < p = ,v
i cili thjeshtohet në formën
0.3h
v .
(1.5)
Zgjidhja kalimtare T(x) zvogëlohet relativisht ngadalë, me të njëjtin ritëm si
edhe komponentja c1e-x
e zgjidhjes, e trajtuar në pikën 2. Kështu që për të përftuar
zgjidhjen e qëndrueshme G(x), segmenti i integrimit duhet të jetë relativisht i madh.
Në analogji me pikën 1.2, edhe këtu, kemi segmentet [0, x1] dhe [x1, x2]. Ndërkaq,
për shkak të kushtit v >> 0, mosbarazimi (1.5) vendos një kufizim të fortë mbi hapin e
integrimit h. Numri i hapave të integrimit është proporcional me madhësinë vx2,
kështu që koha e llogaritjeve dhe rreziku i gabimeve të rrumbullakimit bëhen kritike.
Kjo është një situatë shumë e ngjashme me atë të ekuacionit stiff të përshkruar në
pikën 2, në pikëpamje të kohës së llogaritjeve. Eksperimentet dhe rezultatet numerike
të këtij studimi e konfirmojnë këtë konkluzion. Ndërsa, përsa i përket arritjes së
saktësisë së kërkuar, duket se ekuacionet me rrënjë karakteristike pranë boshtit
imagjinar janë problematike. Zgjidhja mjaft komplekse influencon ndjeshëm në
saktësinë e rezultateve.
Mund të vihet re se zvogëlimi eksponencial i zgjidhjes (1.4) gjatë një hapi h
mund të vlerësohet në mënyrë të përafërt me madhësinë -x-ahe , ndërkaq lëkundja
sinusoidale me frekuencë v gjatë hapit h jep një ndryshim që për analogji mund të
përafrohet në vlerë absolute nga madhësia x2
ahve .π
Në fillim të procesit të integrimit
madhësitë e mësipërme mund të diktojnë kufizime më të forta mbi hapin e integrimit
h në raport me kufizimin (1.5). Veçanërisht ndryshimi lëkundës mund të ketë vlerë të
madhe për një interval të gjatë kohe (kjo varet nga kushtet fillestare të ekuacionit
diferencial). Një mënyrë për të zbutur efektet numerike negative të mësipëme është
shkallëzimi i përshtatshëm i ekuacionit (1.3).
Në analogji me përcaktimin e bërë në pikën 1.2, parametrin v të ekuacionit (1.3)
mund t'a konsiderojmë si koefiçient që shpreh shkallën e lëkundjes së këtij ekuacioni.
1.4. Ekuacionet diferenciale me vlerë të vet dominante të madhe në kuadratin e
parë.

6
Konsiderojmë tani problemin e përgjithshëm të vlerës fillestare të rendit të dytë
f(x, y, y’, y’’) = 0, y(0) = y0, y'(0) = y'0. (1.6)
Shënojmë me = u + iv vlerën dominante të Jakobianit korrespondues të ekuacionit
(1.6), u >> 0 dhe v >> 0. Termi uxT(x)=ce sin(vx+α) me eksponencial të madh rritës
dhe lëkundje me frekuencë të lartë do të dominojë zgjidhjen e ekuacionit (1.6).
Ndryshimi dT(x) i termit T(x), që rrjedh prej ndryshimit të x-it në x + h, mund të
përafrohet në formën dT ux2
chve .π
Kështu që për të matur këtë ndryshim me një
saktësi të pranueshme duhet të përdoret një hap integrimi ekstremisht i vogël.
Rrjedhimisht çdo metodë numerike integrimi e përdorur do të kishte paqëndrueshmëri
dhe pasaktësi. Probleme të tilla të vlerës fillestare dalin p.sh. gjatë përdorimit të
metodës së goditjes për zgjidhjen e problemit kufitar: f(x, y, y’, y’’) = 0, y(a) = A,
y(b) = B. Gjatë implementimit të kësaj metode gjenerohen kushte fillestare arbitrare,
pra pa logjikë fizike, për ekuacionin (1.6). Rrjedhimisht një problem i tillë me shumë
gjasa demonstron paqëndrueshmëri në zona të caktuara të integrimit.
1.5. Rezultate numerike
Në një seri eksperimentesh numerike dhe bazuar në analizat e mësipërme, variantet
homogjene të ekuacioneve (1.2) dhe (1.3), me kushte fillestare respektive y(0) = 1,
y'(0) = 0 dhe y(0) = 0, y'(0) = v, u integruan në segmentin [0 10], për 5 vlera të
ndryshme të v = 10m
: m = 1, 2, 3, 4, 5. Kushtet fillestare të mësipërme janë qëmtuar
posaçërisht. Me këto kushte zgjidhja analitike e problemit (1.2) rezulton të jetë
x -vxv 1Y(x) = e - e
v-1 v-1
,
që formon një kombinim të arsyeshëm të 2 kompeneteve të zgjidhjes. Ndërkaq
zgjidhja analitike e problemit (1.3) për kushtet fillestare të zgjedhura si më lart është
y(x) = exp(-x)sin(vx).
Utiliteti matlab Ode45 u përdor për thjeshtësi për të gjitha problemet. Rezultatet
numerike të përftuara u krahasuan me zgjidhjet analitike respektive dhe gabimet
relative të zgjidhjeve, si dhe kohët kompjuterike respektive të ekzekutimit u vlerësuan
për secilin rast. Këto rezulate janë paraqitur në tabelat 1.1 dhe 1.2 më poshtë.
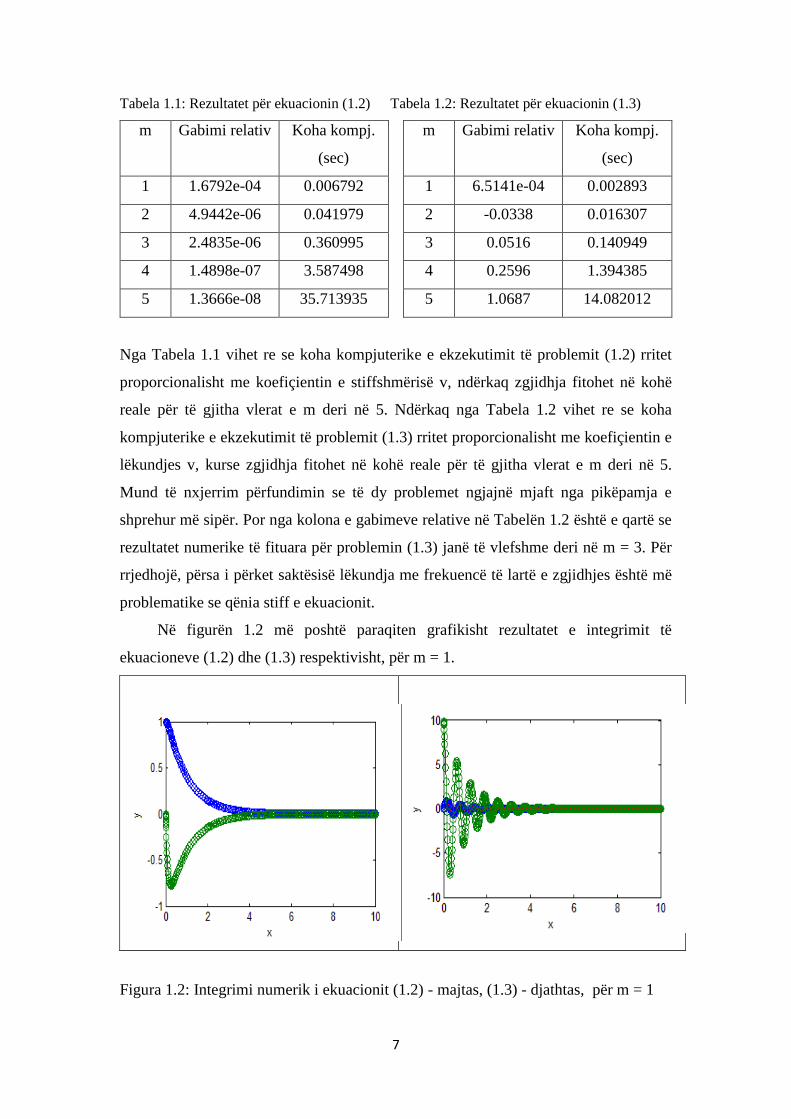
7
Tabela 1.1: Rezultatet për ekuacionin (1.2) Tabela 1.2: Rezultatet për ekuacionin (1.3)
m Gabimi relativ Koha kompj.
(sec)
1 1.6792e-04 0.006792
2 4.9442e-06 0.041979
3 2.4835e-06 0.360995
4 1.4898e-07 3.587498
5 1.3666e-08 35.713935
m Gabimi relativ Koha kompj.
(sec)
1 6.5141e-04 0.002893
2 -0.0338 0.016307
3 0.0516 0.140949
4 0.2596 1.394385
5 1.0687 14.082012
Nga Tabela 1.1 vihet re se koha kompjuterike e ekzekutimit të problemit (1.2) rritet
proporcionalisht me koefiçientin e stiffshmërisë v, ndërkaq zgjidhja fitohet në kohë
reale për të gjitha vlerat e m deri në 5. Ndërkaq nga Tabela 1.2 vihet re se koha
kompjuterike e ekzekutimit të problemit (1.3) rritet proporcionalisht me koefiçientin e
lëkundjes v, kurse zgjidhja fitohet në kohë reale për të gjitha vlerat e m deri në 5.
Mund të nxjerrim përfundimin se të dy problemet ngjajnë mjaft nga pikëpamja e
shprehur më sipër. Por nga kolona e gabimeve relative në Tabelën 1.2 është e qartë se
rezultatet numerike të fituara për problemin (1.3) janë të vlefshme deri në m = 3. Për
rrjedhojë, përsa i përket saktësisë lëkundja me frekuencë të lartë e zgjidhjes është më
problematike se qënia stiff e ekuacionit.
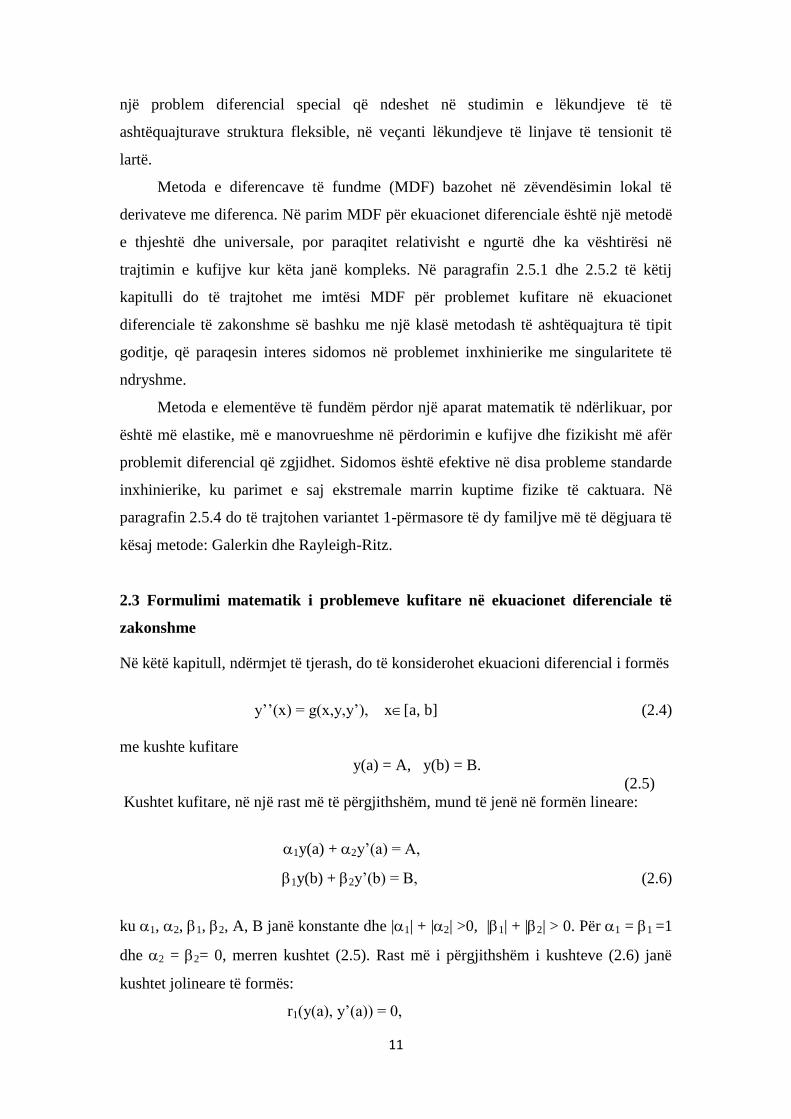
Në figurën 1.2 më poshtë paraqiten grafikisht rezultatet e integrimit të
ekuacioneve (1.2) dhe (1.3) respektivisht, për m = 1.
Figura 1.2: Integrimi numerik i ekuacionit (1.2) - majtas, (1.3) - djathtas, për m = 1

8
1.6. Disa rekomandime për trajtimin e rasteve problematike të integrimit
1) Përdorimi i metodës së goditjes së shumëfishtë për zgjidhjen e problemeve
kufitare, që do të analizohet në paragrafin 2.5.1.4 të këtij punimi, është një alternativë
e mirë për të zbutur efektet negative që prodhon metoda e zakonshme e goditjes.
2) Përdorimi i metodës së diferencave të fundme për zgjidhjen e problemeve kufitare,
që do të analizohet në paragrafin 2.5.2 të këtij punimi, përbën një alternativë më të
mirë, sidomos në rastin e problemeve lineare, pasi përgjithësisht kjo metodë
demonstron veti të mira qëndrueshmërie.
3) Nëse vlerat e veta të Jakobianit qëndrojnë relativisht konstante në segmentin e
integrimit, një klasë metodash numerike që bazohen në polinomet trigonometrike
mund të jenë të dobishme ([4]).
4) Metodat Gear, të pajisura me kontroll automatik të madhësisë së hapit të integrimit
dhe rendit, bëjnë pjesë në libraritë e shquara të programeve për integrimin e
ekuacioneve diferenciale stiff. Në përgjithësi, metodat Gear nuk japin rezultate të
kënaqshme për problemet stiff, për të cilët Jakobiani f’y ka vlera të veta pranë boshtit
imagjinar të planit hc. Metodat e tipit Rosenbrock rezultojnë të jenë efektive në këto
raste. Kostoja llogaritëse e tyre është mjaft më e lartë se ajo e metodave Gear.
5) Disa kode Matlab ofrojnë mundësi për integrimin e problemeve të moderuara stiff.
Metodat përkatëse që qëndrojnë pas këtyre kodeve bazohen në koncepte të ndryshme
të qëndrueshmërisë, kështu që i takon përdoruesit të zgjedhë kodin e duhur që i
përshtatet problemit diferencial që zgjidhet.
6) Gjithsesi përzgjedhja e një metode konkrete për një problem diferencial stiff është
vendimarrje dhe sfidë e përdoruesit. Në paragrafin 3.2 të punimit ne do të ndeshemi
me një sistem diferencial tepër stiff që gjenerohet nga zbatimi i metodës spektrale për
zgjidhjen numerike të problemit të vështirë diferencial të njohur si Ekuacion i
Përgjithshëm i Burgers-Korteweg-de Vries [5], ky i fundit me zbatime të shumta
inxhinierike. Do të shikohet se metodat Runge – Kutta (RK) të tipit eksponencial do
të rezultojnë mjeti efektiv për kapërcimin e vështirësisë stiff të problemit diferencial.
9
KAPITULLI 2
Analizë krahasuese e metodave numerike për zgjidhjen e problemeve
kufitare
2.1 Një formulim i përgjithshëm i problemeve diferenciale
Ekuacionet diferenciale karakterizohen nga një shumëllojshmëri e madhe klasash e
formulimesh të ndryshme. Paraprakisht po fusim shënimet:
- Zonë e hapur në R3(x,y,z) ose R
3(x,y,t) sipas rastit.
D - Zonë e hapur në R2(x,y) ose R
2(x,t) sipas rastit; gjithashtu prerje
ose konfiguracion i zonës për t = t0.
S - Kufiri i zonës ose i zonës D sipas rastit.
f, g, h - Funksione të dhënë në , S ose D
A, B, C, M, C, I - Operatorë diferencialë të rendit r ose r1 < r,
zakonisht linearë ose kuazilinearë.
Dallohen tre tipe problemesh me formulime matematike përkatëse:
(1) Problemet e ekuilibrit
Të gjendet funksioni u = u(x,y,z) i tillë që
Au = f në (2.1)
Bu = g në S.
Problemet e ekuilibrit janë stacionare dhe ndeshen shpesh në studimin e
statikës së strukturave, rrjedhjet e qëndrueshme, fushat elektrostatike
stacionare, etj. Shumica e problemeve diferenciale që ne do të trajtojmë në
këtë kapitull konsiderohen probleme ekuilibri 1-përmasore.
(2) Problemet e vlerave të veta
Të gjendet parametri (me vlera reale ose komplekse) i tillë që problemi
diferencial
Au = Mu në (2.2)
Bu = Cu në S
të ketë zgjidhje të ndryshme nga zgjidhja e dukshme u(x,y,z) 0.

10
Problemet e vlerave të veta mund të shikohen si një përgjithësim apo zgjerim i
problemeve të ekuilibrit. Një konfiguracion, ose një gjendje ekuilibri e caktuar
e një sistemi është e lidhur me specifikimin e vlerës kritike (vlerës së vetë) të
parametrit . Sistemi mund të ketë disa parametra të tillë, pra disa vlera të
veta. Tipike janë problemet e frekuencave në sistemet mekanike, problemet e
rezonancës në qarqet elektrike etj. Problemi i vlerave të veta që do të trajtohen
në paragrafin 2.5.3 të këtij punimi përbën një model tipik 1-përmasor.
(3) Problemet e përhapjes
Të gjendet funksioni u = u(x,y,t) i tillë që
Au = f në , për t > t0
Iu = h në D, ( për t = t0) (2.3)
Bu = g në S, për t t0.
Në problemet e përhapjes shtohet variabli kohor t, pra janë probleme
jostacionare. Ecuria e sistemit të modeluar prej tyre varet ndërmjet të tjerash
nga gjendja e tij në një stad fillestar të kohës t = t0. Shembuj problemesh të
tilla janë ato të përhapjes së nxehtësisë, të përhapjes së valëve në ambiente
elastike, të lëkundjeve të detyruara etj. Dy problemet speciale qe do të
trajtohen kapitullin e tretë të punimit janë probleme përhapje.
Problemet matematike (2.1), (2.2) dhe (2.3) u formuluan për rastin e hapësirës. Ato
mund të formulohen analogjikisht për rastet drejtëz dhe plan. Në zhvillimet e
mëposhtme do t’i nënkuptojmë të tre rastet më sipër, por rasti një-përmasor do të jetë
në fokusin tonë kryesor.
2.2 Metodat numerike për zgjidhjen e problemeve diferenciale
Metodat numerike për zgjidhjen e problemeve 2.1, 2.2, dhe 2.3, në përgjithësi
bazohen në paraqitjen e përafërt lokale të zgjidhjes me funksione elementare,
zakonisht polinome. Historikisht dhe në varësi të aparatit matematik që përdoret
dallohen dy metoda kryesore: Metoda e diferencave të fundme dhe metoda e
elementëve të fundëm. Metodat e mësipërme e reduktojnë një problem diferencial në
problem algjebrik, respektivisht linear n.q.s. problemi diferencial është i tillë, dhe
zakonisht me matricë të rrallë. Për problemet e përhapjes të tipit hiperbolik krahas
tyre zë vend të veçantë metoda e karakteristikave. Në [6] dhe në paragrafin 3.1 të këtij
studimi ne analizojmë dhe zbatojmë një version hibrid të kësaj metode për të zgjidhur
11
një problem diferencial special që ndeshet në studimin e lëkundjeve të të
ashtëquajturave struktura fleksible, në veçanti lëkundjeve të linjave të tensionit të
lartë.
Metoda e diferencave të fundme (MDF) bazohet në zëvendësimin lokal të
derivateve me diferenca. Në parim MDF për ekuacionet diferenciale është një metodë
e thjeshtë dhe universale, por paraqitet relativisht e ngurtë dhe ka vështirësi në
trajtimin e kufijve kur këta janë kompleks. Në paragrafin 2.5.1 dhe 2.5.2 të këtij
kapitulli do të trajtohet me imtësi MDF për problemet kufitare në ekuacionet
diferenciale të zakonshme së bashku me një klasë metodash të ashtëquajtura të tipit
goditje, që paraqesin interes sidomos në problemet inxhinierike me singularitete të
ndryshme.
Metoda e elementëve të fundëm përdor një aparat matematik të ndërlikuar, por
është më elastike, më e manovrueshme në përdorimin e kufijve dhe fizikisht më afër
problemit diferencial që zgjidhet. Sidomos është efektive në disa probleme standarde
inxhinierike, ku parimet e saj ekstremale marrin kuptime fizike të caktuara. Në
paragrafin 2.5.4 do të trajtohen variantet 1-përmasore të dy familjve më të dëgjuara të
kësaj metode: Galerkin dhe Rayleigh-Ritz.
2.3 Formulimi matematik i problemeve kufitare në ekuacionet diferenciale të
zakonshme
Në këtë kapitull, ndërmjet të tjerash, do të konsiderohet ekuacioni diferencial i formës
y’’(x) = g(x,y,y’), x[a, b] (2.4)
me kushte kufitare
y(a) = A, y(b) = B.
(2.5)
Kushtet kufitare, në një rast më të përgjithshëm, mund të jenë në formën lineare:
1y(a) + 2y’(a) = A,
1y(b) + 2y’(b) = B, (2.6)
ku 1, 2, 1, 2, A, B janë konstante dhe |1| + |2| >0, |1| + |2| > 0. Për 1 = 1 =1
dhe 2 = 2= 0, merren kushtet (2.5). Rast më i përgjithshëm i kushteve (2.6) janë
kushtet jolineare të formës:
r1(y(a), y’(a)) = 0,

12
r2(y(b), y’(b)) = 0.
Për sistemin e n ekuacioneve diferenciale të rendit të parë, problemi i vlerës kufitare,
me kushte lineare të formës (2.6) ka trajtën
T T
1 2 n 1 2 n
(x)= (x, ), x [a,b]
(a)+ (b)- =
ku =(y , y , , y ) , =(c ,c , ,c )
y f y
Ay By c 0
y c
(2.7)
A = (aij) dhe B = (bij) më sipër janë matrica katrore të rendit n konstante dhe c është
vektor konstant.
Theksojmë se problemi i vlerës kufitare për ekuacionin diferencial të rendit n:
y(n)
(x) = f(x,y,y’,…, y(n-1)
), x[a, b]
me kushte kufitare lineare, reduktohet në një problem të formës (2.7) pas
zëvendësimeve yk+1 = y(k)
, k = 0,…,n-1.
Më poshtë do t’i referohemi problemit (2.4)-(2.5), por shumica e rezultateve mund të
shtrihen menjëherë për problemin (2.4)-(2.6). Ndërkaq disa rezultate më të avancuara
do të zhvillohen për problemin e përgjithshëm (2.7).
Problemi i ekzistencës dhe unicitetit të zgjidhjes për problemet kufitare, në
përgjithësi, është mjaft i ndërlikuar. P.sh. problemi i thjeshtë:
y’’ + y = 0, y(0) = 0, y() = B,
ka një pafundësi zgjidhjesh n.q.s. B = 0 dhe s’ka zgjidhje n.q.s. B 0.
Për problemin (2.4)-(2.6) ka vend teorema 2.1 [7].
Teorema 2.1 (Kushtet e ekzistencës së zgjidhjes)
N.q.s. në bashkësinë D = { x[a,b], - y, y’ + } plotësohen kushtet:
a) derivatet e pjesshme të g janë funksione të vazhdueshëm
b) y2 +y’
2 është madhësi e kufizuar
c) Ekzistojnë konstantet 0 <L, M < të tilla që:
0
g
yL,
g
yM
d) 12 0 dhe 12 0
atëherë problemi (2.4)-(2.6) ka zgjidhje të vetme.
Për problemin (2.4)-(2.5) formulimi thjeshtohet mjaft:

13
Teorema 2.2 (Kushtet e ekzistencës së zgjidhjes)
N.q.s në bashkësinë D = { x[a,b], - y, y’ + } plotësohen kushtet:
a) g,
g
y dhe
g
y janë funksione të vazhdueshëm
b)
g
y 0
c)
g
y është madhësi e kufizuar
atëherë problemi (2.4)-(2.5) ka zgjidhje të vetme.
2.4 Disa probleme tipike inxhinierike qe modelohen me anën e problemeve
kufitare
2.4.1 Përkulja e një trau me skaje të fiksuara
Një problem që ndeshet shpesh në inxhinierinë e ndërtimit ([8]) është përkulja e një
trau me skaje të fiksuara, si rezultat i ngarkesës me densitet konstant (Fig. 2.1).
Figura 2.1: Përkulja e traut me skaje të fiksuara
Ekuacioni diferencial që përshkruan këtë fenomen është:
y’’ + S
EIy =
qx
2EI(x-l) ,
ku y = y(x) është përkulja në distancën x nga skaji i majtë i traut, kurse l, q, E, S dhe I
janë respektivisht gjatësia e traut, intensiteti i ngarkesës uniforme, moduli i
elasticitetit, shtypja në skaje dhe momenti i inercisë. Ekuacioni i mësipërm duhet të
plotësojë dy kushtet që rrjedhin prej supozimit se në skajet e traut x = 0 dhe x = l, nuk
kemi përkulje: y(0) = y(l) = 0.
N.q.s. trau është me trashësi të njëjtë, prodhimi EI është konstant dhe në këtë rast
ekuacioni diferencial mund të zgjidhet analitikisht. Por në zbatime, në përgjithësi,
trashësia nuk është uniforme, kështu që momenti i inercisë I është funksion i x.
Zgjidhja analitike bëhet e pamundur.

14
2.4.2 Studimi i presioneve mbi nje tra
Një problem tjeter i rëndësishëm i vlerës kufitare, që ndeshet në studimin e presioneve
në një tra ([7]), formulohet në formën:
d
dxp(x)
dy
dxq(x)y = f(x)+( ) , x[0,1] (2.8)
me kushte kufitare
y(0) = y(1) = 0. (2.9)
Problemi modelon përkuljen y(x) të një trau me gjatësi 1 njësi dhe seksion të prerjes
tërthore q(x). Trau është objekt edhe i presioneve të jashtme p(x) dhe f(x), që ndikojnë
mbi përkuljen y(x). Mund të vihet re që problemi i vlerës kufitare
d
dxp(x)
dy
dxq(x)y = f(x)+( ) , x[a,b],
me kushte kufitare
y(a) = A, y(b) = B
mund të transformohet në formën (2.8)-(2.9).
Ky problem do të analizohet dhe zgjidhet numerikisht në paragrafin 2.5.4.5 të këtij
kapitulli.
2.4.3 Ekuacionet e Euler-Bernoull-it
Problemet e mëposhtme të vlerës kufitare ndeshen në disa fusha të matematikës së
aplikuar, fizikë, inxhinieri elektrike dhe veçanërisht në studimin e vibracioneve
mekanike si dhe të ashtuquajturin fenomen të rezonancës parametrike ([9], [10], [11],
[12], [13], [14]).
(I) Ekuacioni Euler-Bernoulli i llojit të parë
[ ( ) ''( )]'' ( ) ( )] 0.p x y x s x y x (2.10)
(II) Ekuacioni Euler-Bernoulli i llojit të dytë
[ ( ) ''( )]'' [ ( ) ( )] ( ) 0.p x y x r x s x y x (2.11)
(III) Ekuacioni i përgjithshëm Euler-Bernoulli
[ ( ) ''( )]'' [ ( ) '( )]' [ ( ) ( )] ( ) 0.p x y x q x y x r x s x y x (2.12)

15
Mund të vihet re se (2.10) është rast i veçantë i (2.11) dhe ky i fundit rast i veçantë i
(2.13). Metoda të posaçme numerike do të analizohen dhe implementohen për
problemin e përgjithshëm Euler-Bernoulli në paragrafin 2.5.3 të këtij kapitulli.
2.5 Metodat numerike bazë për zgjidhjen e problemeve kufitare
Për qëllimet e studimit tonë këtu do të përshkruajmë dhe analizojmë 3 metodat
numerike bazë për zgjidhjen e problemeve kufitare: 1) Metodat e tipit goditje 2)
Metodat e diferencave të fundme 3) Metodat e elementeve të fundme
2.5.1 Metodat numerike të tipit goditje
Avantazhi kryesor i metodave të këtij grupi është aplikimi i tyre në problemet
inxhinierike që shoqërohen me singularitete të ndryshme të problemit që zgjidhet (të
cilat vështirësojnë përdorimin e metodave të tjera). Ideja kryesore e metodave të këtij
tipi është reduktimi i problemeve kufitare dhe zgjidhja e tyre me ndihmën e
problemeve të vlerës fillestare. Do të dallojmë 4 raste.
2.5.1.1 Metoda e goditjes - rasti linear
Supozojmë se problemi diferencial (2.4)-(2.5) ka formën
y’’ = p(x)y’ + q(x)y + r(x), y(a) = A, y(b) = B. (2.13)
Problemi (2.13) quhet problem kufitar linear dhe ndeshet shpesh në zbatime. Problemi
i përkuljes së traut është një rast i veçantë i tij.
Kushtet e teoremës 2.2 thjeshtohen në mënyrë të ndjeshme në këtë rast. Konkretisht,
n.q.s.:
1) p(x), q(x) dhe r(x) janë funksione të vazhdueshëm në [a,b]
2) q(x) 0
atëherë problemi (2.14) ka zgjidhje të vetme.
Për të zgjidhur numerikisht problemin (2.13) konsiderojmë 2 probleme ndihmës
të vlerës fillestare:
y’’ = p(x)y’ + q(x)y + r(x), y(a) = A, y’(a) = 0, (2.14)
y’’ = p(x)y’ + q(x)y y(a) = 0, y’(a) = 1, (2.15)
secili prej të cilëve ka zgjidhje të vetme. Shënojmë me y1(x) zgjidhjen e problemit
(2.14) dhe y2(x) atë të (2.15). Mund të verifikohet lehtë që funksioni
y(x) = y1(x) + B - y b)
y b)1
2
(
( y2(x) (2.16)

16
është zgjidhja e vetme e problemit të vlerës kufitare (2.13), natyrisht me kushtin që
y2(b) 0. Mund të verifikohet që y2(b) = 0 bie në kundërshtim me kushtet e supozuara
për problemin (2.13).
Në këtë mënyrë zgjidhja e problemit kufitar (2.13) është reduktuar në zgjidhjen
e dy problemeve të vlerës fillestare (2.14) dhe (2.15). Secili prej tyre mund të zgjidhet
numerikisht me një nga metodat e shumta të integrimit numerik. Po i shënojmë
zgjidhjet numerike respektive të tyre me {y1,i} dhe {y2,i}. Atëherë kombinimi linear
{yi}= {y1,i}+ B - y
y
1,N
2,N
{y2,i}, i = 0:N (2.17)
është zgjidhja numerike {yi} e problemit (2.13).
Një skedar i pergjithshëm Matlab për zgjidhjen e problemit linear (2.13) mund të ketë
pamjen
[x Y1] = ode45('p1', [a b], [A 0])
% zgjidhet problemi i parë Koshi (2.14)
% p1.m është skedari matlab ndihmës për funksionin mbrapa të cilit qëndron
% sistemi diferencial përkatës i ekuacionit (2.14).
% Komanda prodhon kolonën e nyjeve të integrimit x, dhe matricën Y1 me 2
kolona, % për zgjidhjen y1(x) dhe derivatin e parë të saj në nyjet respektive x.
[x Y2] = ode45('p2', x, [0 1])
% zgjidhet për analogji problemi i dytë Koshi (2.15).
% Duhet vënë re veçoria e kësaj komande që lejon që zgjidhja y2(x) të llogaritet në
% të njëjtin rrjet nyjesh x si dhe zgjidhja y1(x)
k = (1 - Y1(end,1)) / Y2(end,1); % llogaritet koefiçienti k në formulën (2.17)
y = Y1(:,1) + k*Y2(:,1) % llogaritet zgjidhja numerike y sipas formulës (2.17)
plot(x, y, 'r*'); % grafikohet zgjidhja numerike
Metoda e mësipërme mund të përshtatet pa vështirësi për problemin e vlerës kufitare:
y’’ = p(x)y’ +q(x)y + r(x), a < x < b, (2.18)
1y(a) + 2y’(a) = A, |1| + |2| >0, (2.19)
1y(b) + 2y’(b) = B, |1| + |2| > 0. (2.20)

17
2.5.1.2 Metoda e goditjes - rasti jolinear
Konsiderojmë tani problemin jolinear të vlerës kufitare (2.4)-(2.5), duke e shkruar në
formën:
y’’(x) = g(x,y,y’), y(a) = A, y(b) = B. (2.21)
Ideja e zgjidhjes numerike të rastit linear mund të shtrihet për problemin jo linear
(2.21), veçse këtu zgjidhja e problemit jolinear nuk mund të shprehet si kombinim
linear i zgjidhjeve të dy problemeve të vlerës fillestare. Në vend të dy problemeve
ndihmëse (2.14) dhe (2.15), këtu ndërtohet problemi "parametrik" i vlerës fillestare
y’’(x) = g(x,y,y’), y(a) = A, y’(a) = t. (2.22)
Në themel të metodës qëndron zgjidhja e ekuacionit algjebrik (strategji të ndryshme
mund të përdoren për këtë): Të gjendet t tek (2.22), e tillë që:
y(b, t) - B = 0. (2.23)
Vlen të përmendet se si varianti-Njuton i zgjidhjes ashtu dhe ai sekant, janë vetëm
lokalisht konvergjentë, d.m.th. kërkojnë përafrime të mira fillestare.
Zgjidhja më e thjeshtë do të ishte përdorimi i utiliteve që Matlab ofron. Skedarët e
duhur Matlab për këtë qëllim mund të kenë pamjen:
% Skedar Matlab për zgjidhjen e problemit kufitar jolinear
t0=(B-A)/(b-a) % zgjidhet "shënjestra" e goditjes së parë
t=fzero('dif',t);
[tt yy]=ode45('g',[a b],[0 t]);
plot(tt,yy(:,1),'r*');
hold on
plot('zgjidhjateorike', [a b])
function D=dif(t)
% ky është skedar-funksioni që matlabizon ekuacionin (2.23)
[tt yy]=ode45('g',[a b],[A t]);
D=yy(end,1)-B;
Natyrisht që duhet krijuar dhe skedar-funksioni g.m që matlabizon funksionin mbrapa
të cilit qëndron ekuacioni diferencial (2.21).

18
2.5.1.3 Metoda e goditjes për problemin e vlerës kufitare (2.7)
Konsiderojmë problemin e vlerës kufitare (2.7), të cilin po e rishkruajmë
T T
1 2 n 1 2 n
(x)= (x, ), x [a,b]
(a)+ (b)- =
ku =(y , y , , y ) , =(c ,c , ,c )
y f y
Ay By c 0
y c
(2.24)
A = (aij) dhe B = (bij) më sipër janë matrica katrore të rendit n konstante dhe c është
vektor konstant.
Zgjidhja e problemit (2.24) fillon me zgjidhjen e problemit të vlerës fillestare
y f y(x) = (x, ), y(a) = s =
1
n
s
s
. (2.25)
N.q.s. shënojmë me y = y(x, s) zgjidhjen e problemit (2.25) atëherë vektori s duhet të
përcaktohet në mënyrë të tillë që
f(s) = As + By(b, s) - c = 0. (2.26)
Sistemi (2.26) është një sistem prej n ekuacionesh jolineare, përkundrejt të
panjohurave s1, s2, …, sn. Zgjidhja e problemit (2.25) me ndonjë prej metodave të
integrimit numerik lejon që të fitohen përafrimet yi,s të zgjidhjes y(xi, s) në rrjetin e
nyjeve xi = a + i(b - a)/N, i = 1,…,N, që sigurisht janë të varura nga s. Në këtë
mënyrë sigurohet përafrimi yb,s për y(b, s) që zëvendësohet tek ekuacioni (2.26).
Metodat e tipit goditje përdoren për një klasë problemesh mjaft më të gjerë ([15]) se
problemet (2.5), (2.9) apo (2.24). Por gjatë zbatimit praktik të tyre ndeshen dy
vështirësi:
1. Në përgjithësi është e vështirë të gjenden përafrime fillestare të sakta, të paktën aq
sa të sigurohet konvergjenca e iteracionit Njutonian apo sekant.
2. Shpesh problemet e vlerës fillestare ndihmës të gjeneruara prej metodave të tipit
goditje si (2.14), (2.15), (2.22), apo (2.25) janë të paqëndrueshme, në kuptimin e
qëndrueshmërisë së përshkruar në [16] apo në kapitullin e parë të këtij studimi.
Të dyja vështirësitë e mësipërme kapërcehen në një masë të mirë ([15]) në metodën
që pason.

19
2.5.1.4 Metoda e goditjes shumëfishe.
Në këtë metodë krahas coptimit të zakonshëm të segmentit të integrimit [a, b] në N
nënsegmente [xi, xi+1] me anën e rrjetit të pikave nyje
a = x0 x1 … xN = b (2.27)
bëhet një ricoptim tjetër i segmentit [a, b] në m+1 nënsegmente [tk, tk+1] me anën e
pikave:
a = t0 t1 … tm tm+1 = b. (2.28)
Bashkësia e pikave {tk}, k = 1,…,m+1, do të jetë një nënbashkësi e bashkësisë {xi},
i = 0,…,N, pra m+1 N. Sa më i vogël të jetë secili prej segmenteve [tk, tk+1] (pra sa
më i imët të jetë coptimi i dytë), aq më i dobët do të jetë efekti i paqëndrueshmërisë së
problemeve të vlerës fillestare ndihmëse. Vazhdimin e mëtejshëm të metodës së
goditjes shumëfishe po e bëjmë duke i'u referuar problemit (2.24) të vlerës kufitare.
Po japim më poshtë trajtën algoritmike të metodës së goditjes shumëfishe për
zgjidhjen e këtij problemi.
Algoritmi 2.1 (Metoda e goditjes shumëfishe - rasti i përgjithshëm)
Të dhëna: Problemi i vlerës kufitare (2.24)
N - numri i nënsegmenteve të segmentit [a, b]
xi = a + ih, i = 0,…,N - pikat nyje të integrimit
Rezultate: Përafrimet yi të zgjidhjes y(xi)
Llogaritje: I. Përcaktimi i rrjetit të pikave tk, k = 0,…,m+1
1. Në nyjet xi, duke filluar me i = 1, llogarisim përafrimet Y1(xi)
, duke zgjidhur
problemin e vlerës fillestare
y f y y s(x) = (x, ), (a) = .
s më sipër është një përafrim fillestar i çfarëdoshëm.
Për çdo i verifikojmë nëse është i vërtetë mosbarazimi i mëposhtëm
||Yi1|| > R||Y
1(a)|| ( = R|| s ||) . (2.29)
Më sipër R është parametër i përdoruesit. Zakonisht 2 R 102.
||…|| është një prej
normave vektoriale. Shënojmë me j1 të parin indeks i për të cilin plotësohet (2.29) dhe
procesi i llogaritjes së Y1(xi) për i > j1 ndërpritet.

20
Vërejtje: Është më e rekomandueshme që përafrimet Y1(xi) të llogariten me metodën
e zakonshme të goditjes dhe në vend të s arbitrare më sipër do të gjenim s = Y1(a)
2. Shënojmë me t1 = x j1 dhe llogarisim përafrimet Y
2(xi), për i > j1 duke zgjidhur
problemin e vlerës fillestare
y f y y(x) = (x, ), (t ) = Y t1
1
1( ) .
Për çdo i verifikojmë nëse është i vërtetë mosbarazimi i mëposhtëm
||Y2(xi)|| > R||Y
2(t1)||.
N.q.s. mosbarazimi më sipër plotësohet për herë të parë për i = j2, llogaritja për i > j2
ndërpritet.
2. Shënojmë me t2 = x j2 dhe llogarisim përafrimet Y
3(xi), për i > j2 duke zgjidhur
problemin e vlerës fillestare
y f y y(x) = (x, ), (t ) = Y t2
2
2( ) .
Vazhdojmë kështu me rradhë deri sa të gjendet një indeks jk i tillë që
tk := x jk= xN-1. Shënojmë m = jk dhe shikojmë se procesi për përcaktimin e rrjetit të
pikave tk, k = 0, 1,…,m+1, është përfunduar.
II. Llogaritja e përafrimeve yi = y(xi)
4. Në secilin prej nënsegmenteve [tk, tk+1] fusim një variabël të ri t me anën e
barazimeve:
t =x - t
hk
k
ku hk = tk+1 - tk, k = 0,…,m
Për x[tk, tk+1] fusim shënimet
kështu që
k k k
k k k k k k
kk k
(x) = (t + th ):= (t)
(t, (t)):=h (t th , (t)) (2.30)
d (t)(t, (t)) per 0 t 1, k=0, ,m (2.31)
dt
y y y
f y f y
yf y
me kushte ndërmjetëse
yk+1(0) - yk(1) = 0 për k= 0,…,m-1 (2.32)
dhe kushte kufitare
Ay0(0) + Bym(1) - c = 0 (2.33)

21
5. (m+1) sistemet e ekuacioneve diferenciale të rendit të parë (2.31) mund të
rishkruhen si një sistem i vetëm prej (m+1)n ekuacioneve diferenciale të rendit të
parë:
0 0 0
1 1 1
m m m
dˆ ˆ(t)= (t, (t)) per 0 t 1
dt
(t) (t, )
(t) (t, )ˆ ˆ(t)= , (t, )=
(t) (t, )
y F y
y f y
y f yy F y
y f y
(2.34)
Kushtet (2.32) dhe (2.33) mund të kombinohen së bashku në formën
ˆ ˆ ˆˆ ˆ (0)+ (1)= (2.35)
ku
ˆ ˆ ,
Ay By c
A 0 0 0 0 0
0 I 0 0
A 0 0 I 0 B
0 0 0 I
,
0 0 B c
I 0 0 0 0 0
0 I 0 0 0 c 0
0 0 0 I 0 0
Këtu 0 është matrica katrore zero me përmasa (n,n), I matrica njësi (n,n), vektori c ka
(m+1)n komponente, A, B janë matrica katrore bllok (m+1,m+1) dhe çdo bllok është
matricë (n,n).
6. Problemi i vlerës kufitare (2.34)-(2.35) mund zgjidhet me metodën e zakonshme të
goditjes.
Një metodë numerike e tipit të goditjes së shumëfishtë për zgjidhjen e problemit
(2.21) është propozuar në [17], ku ndërmjet të tjerash është analizuar problemi i
gjetjes së një parametri të përshtatshëm për shumëfishitetin e goditjes. Janë dhënë disa
konsiderata, por implementimi i metodës nuk është bërë dhe rezultate numerike për të
nuk janë paraqitur. E kemi konsideruar këtë si jashtë caqeve dhe mundësive të këtij
studimi.

22
2.5.2 Metoda të Diferencave të Fundme për zgjidhjen e problemeve të vlerës
kufitare
Metodat e këtij paragrafi kanë karakteristika qëndrueshmërie më të mira se metodat e
tipit goditje, por kanë kosto llogaritëse më të lartë dhe përdorimi i tyre në zgjidhjen e
një problemi konkret kërkon më tepër lodhje e konsum mendor.
Ideja qëndrore e metodave me diferenca të fundme është zëvendësimi i
derivateve tek ekuacioni diferencial që zgjidhet, me anën e përafrimeve të
përshtatshme. Më tej problemi diferencial transformohet në një problem algjebrik, më
konkretisht në një sistem ekuacionesh algjebrikë, zgjidhja numerike e të cilit është
njëkohësisht zgjidhja e përafërt e problemit diferencial të dhënë. Lineariteti apo
jolineariteti i problemit diferencial reflektohet me të njëjtin kah tek problemi algjebrik
përkatës. Shtjellimin e mëtejshëm të metodës po e bëjmë duke i'u referuar problemit
diferencial kufitar përkatës.
2.5.2.1 Rasti linear
Konsiderojmë problemin linear të vlerës kufitare
y’’ = p(x)y’ + q(x)y + r(x), y(a) = A, y(b) = B. (2.36)
Segmenti i integrimit [a, b] ndahet në N+1 pjesë të barabarta me anën e rrjetit të
nyjeve xi = a + ih, për i = 0, 1,…, N+1, ku h = (b-a)/(N+1). Pas zëvendësimit të
derivateve me diferencat qëndrore dhe pas disa manipulimeve algjebrike, zgjidhja
numerike e ekuacionit diferencial (2.36), me metodën e diferencave të fundme të
rendit të parë merret duke zgjidhur sistemin algjebrik tridiagonal
(2.37)
matrica dhe termat e lirë të të cilit, llogariten me anën e formulave (2.38).
ai = 2 + h2q(xi), bi = -1 + (h/2)p(xi), ci = -1 - (h/2)p(xi), i = 1,…,N,
di = -h2r(xi), i = 2,…,N-1; d1 = -h
2r(x1) - c1A, dN = -h
2r(xN) - bNB. (2.38)

23
2.5.2.2 Rasti jolinear
Për problemin e përgjithshëm të vlerës kufitare:
y’’(x) = g(x,y,y’), y(a) = A, y(b) = B, (2.39)
metoda e diferencave të fundme e përshkruar më sipër mund zhvillohet në mënyrë të
ngjashme. Veçse këtu sistemi algjebrik rezultant do të jetë jolinear, ashtu si edhe
problemi diferencial (2.39). Konkretisht, pas zëvendësimit të derivateve me diferenca
qëndrore dhe pas manipulimeve algjebrike analoge me rastin linear fitohet sistemi
prej N x N ekuacionesh algjebrike jolineare të formës:
2y1 - y2 + h2g x y
y
h1 12, ,
AA
20
-y1 + 2y1 - y3 + h2g x y
y y
h2 23 1, ,
20
(2.40)
-yN-2 + 2yN-1 - yN + h2g x y
y y
hN-1 N-1N N-2, ,
20
-yN-1 + 2yN + h2g x y
B y
hBN N
N-1, ,
20
i cili mund të zgjidhet vetëm numerikisht.
2.5.2.3 Metodat e diferencave të fundme të rendeve të larta
Rritja e saktësisë së metodës së diferencave është e lidhur me saktësinë e llogaritjes së
derivateve y’(x) dhe y’’(x) sipas formulave të diferencave qëndrore. Zvogëlimi i
gabimit lokal të derivateve, që është i formës O(h2), kërkon zvogëlimin e hapit të
integrimit h, ndërkaq kjo e fundit sjell drejtpërdrejt rritjen e numrit N (= (b-a)/h) të
ekuacioneve të sistemeve algjebrike (2.37) dhe (2.40).
Një alternativë tjetër për rritjen e saktësisë, pa e rritur numrin e ekuacioneve
algjebrike që duhet të zgjidhen, është rritja e rendit të gabimit lokal të formulave për
përafrimin e derivateve y’(x) dhe y’’(x) me diferenca qëndrore. Konkretisht në vend
të formulave zakonshme të diferencave qëndrore me rend të gabimit lokal të formës
O(h2), mund të përdoren formula të tjera me rend të gabimit lokal më të lartë. Më
poshtë jepen dy çifte formulash të tilla me gabime lokale respektivisht të formës O(h4)
dhe O(h6).
yi’ = 1
12h(yi-2 - 8yi-1 + 8yi+1 - yi+2), li = O(h
4),

24
yi’’ = 1
12h2(-yi-2 + 16yi-1 - 30yi + 16yi+1 - yi+2), li = O(h
4),
yi’ = 1
60h(-yi-3 + 9yi-2 - 45yi-1 + 45yi+1 - 9yi+2 + yi+3), li = O(h
6),
yi’’ = 1
180h 2(2yi-3 - 27yi-2 +270yi-1 - 490yi +270yi+1 - 27yi+2 + 2yi+3),
li = O(h6).
Mund të verifikohet se sistemet algjebrike analoge të (2.37) apo (2.40), që do të
rezultonin nga përdorimi i formulave me gabim lokal O(h4), do të ishin sisteme me
matrica bandë 5-diagonale dhe ekuacionet përkatëse të tyre do të formoheshin për çdo
xi, i = 3,…, N-2. Për 6 nyjet skajore është e nevojshme të shkruhen formula të tjera,
tashmë jo të qendërzuara për shprehjen e përafërt të derivateve. Nxjerrja e formulave
të tilla në zbatime të posaçme bëhet sipas parimit të metodës së koefiçientëve të
papërcaktuar, ndërkaq përzgjedhja e koefiçientëve motivohet së pari nga ruajtja e
saktësisë së procesit të diferencave, në rastin konkret O(h4), dhe më tej nga
uniformiteti dhe komoditeti paraqitës i 6 ekuacioneve shtesë në ansamblin e N-6
ekuacioneve bazë. Më të përdorura janë të ashtëquajturat formula të diferencave nga
para (forward) për përafrimin e derivateve në nyjen e majtë skajore dhe formulat e
diferencave nga pas (backword) për përafrimin e derivateve në nyjen e djathtë
skajore. Në kapitullin 3 të këtij punimi, paragrafi 3.1, do të përzgjidhen sipas
përshkrimit më sipër formulat përkatëse të diferencave.
2.5.2.4 Metoda e diferencave të fundme për ekuacionet diferenciale të rendeve të
larta
Problemet e vlerës kufitare për ekuacionet diferenciale të rendeve më të larta se dy
trajtohen në mënyrë të ngjashme me ato të rendit të dytë, veçse këtu kompleksiteti
algjebrik i problemeve vështirëson në mënyrë të ndjeshme nxjerrjen e metodave të
diferencave dhe implementimin e tyre në zbatime konkrete. Së pari duhen nxjerrë
formula të posaçme dhe të të njëjtit rend, për shprehjen e të gjithë derivateve që
figurojnë në ekuacion, me anën e diferencave. Më tej shkruhen formulat me po atë
rend për nyjet skajore, numri i të cilave varet nga rendi i ekuacionit diferencial si dhe
nga rendi i metodës së diferencave që do të zhvillohet. Po japim më poshtë dy formula
të rendit të dytë për shprehjen e derivateve të rendit të tretë e të katërt me anën e
diferencave.

25
yi’’’ = 1
2h 3(-yi-2 + 2yi-1 - 2yi+1 + yi+2), li = O(h
2),
yi(4)
= 1
h 4(yi-2 - 4yi-1 + 6yi - 4yi+1 + yi+2), li = O(h
2).
2.5.3 Metoda të posaçme për zgjidhjen e problemeve kufitare Euler-Bernoull
Ekuacionet diferenciale të rendeve të larta pas zëvendësimeve të përshtatshme
kthehen në sisteme diferenciale të shkallës së parë. Kompleksiteti algjebrik i
formulave të diferencave për derivatet e rendeve të larta "transferohet" në
kompleksitetin e procedimit algjebrik të sistemeve diferenciale përkatës. Por për
sistemet diferenciale të shkallës së parë ka alternativa të tjera për rritjen e saktësisë së
përafrimeve të derivateve që janë më racionale dhe më të manipulueshme
algjebrikisht se sa alternativa analoge e rritjes së saktësisë e përshkruar në paragrafin
2.5.2.3. Shquhet në veçanti teknika e përafrimit Pade. Sidoqoftë metodat e këtij lloji
nuk e kanë universalitetin e MDF apo MEF dhe kërkojnë trajtim specifik sipas
problemit diferencial që zgjidhet. Në këtë paragraf do të tregohet se si mund të
zgjidhet në mënyrë efiçiente problemi i përgjithshëm Euler - Bernoull me dy metoda
të posaçme numerike të rendeve respektivisht 2 dhe 4. Më tej do të zgjidhet i njëjti
problem me një metodë numerike të tipit goditje. Do të implementohet konkretisht kjo
e fundit dhe do të komentohen e krahasohen rezultatet saj me ato të literaturës [10]
dhe [11].
2.5.3.1 Formulimi i problemit kufitar të vlerave të veta në ekuacionin e
përgjithshëm Euler-Bernoull
Të gjendet vlera e vet më e vogël e parametrit për të cilën ka zgjidhje të ndryshme
nga zgjidhja e dukshme y(x) = 0, ekuacioni diferencial
[ ( ) ''( )]'' [ ( ) '( )]' [ ( ) ( )] ( ) 0p x y x q x y x r x s x y x , a<x<b (2.41)
me kushte kufitare:
( ) ''( ) ( ) ''( ) 0y a y a y b y b (2.42)
ose
( ) '( ) ( ) '( ) 0y a y a y b y b . (2.43)
Me supozimin që funksionet p(x), q(x), r(x) dhe s(x) janë të vazhdueshëm në
intervalin [a,b] dhe plotësojnë kushtet 2( ) [ , ],p x C a b 1( ) [ , ]q x C a b , p(x), q(x),

26
s(x) > 0 dhe r(x) ≥ 0 për x∈[a,b], tregohet ([18]) se vlerat e veta të problemit (2.41)
janë reale dhe pozitive.
Duke futur shënimet ( ) '( ),u u x y x ( ) ''( )v v x y x dhe ( ) '''( )w w x y x ,
ekuacioni (2.41) transformohet në sistemin e ekuacioneve diferenciale të rendit të
parë.
( ) ( ) ( ) ( ) ( ),DY x Q x Y x P x Y x (2.44)
ku
( ) [w,v,u, ]TY x y . (2.45)
D= diag{d/dx}, kurse Q=Q(x) dhe P=P(x) janë matricat 4x4 si më poshtë :
( ) (x) (x) (x)
1 0 0 0 Q(x)=
0 1 0 0
0 0 1 0
x
, (2.46)
0 0 0 (x)
0 0 0 0( )
0 0 0 0
0 0 0 0
P x
(2.47)
dhe
'( )( ) 2 ,
( )
p xx
p x
( ) ''( )
( ) ,( )
q x p xx
p x
'( )( ) ,
( )
q xx
p x
( )( ) ,
( )
r xx
p x
( )( ) .
( )
s xx
p x
( 2.48)
Konsiderojmë rrjetin e nyjeve
G:1 2 1....... ,o N Na x x x x x b
që fitohet nga ndarja e segmentit [a,b] në N+1 nënsegmente të barabartë, secili me
gjatësi h=(b-a/(N+1), ku N≥5 është një numër i plotë pozitiv.
Shkruajmë ekuacionin diferencial (2.41) në nyjen e brendshme xi, i = 1, 2, ..., N
të rrjetës G:
( ) [w( ),v( ),u( ), ( )] [ '''( ), ''( ), '( ), ( )] .T T
i i i i i i i i iY x x x x y x y x y x y x y x
Shënojmë me [w ,v ,u , ] ,T
i i i i iY y , i 1,2,...... .ix x N
Madhësitë , , , ,i i i iu w y më sipër janë përafrimet respektive të madhësive teorike
'''( ), ''( ), '( ), ( )y x y x y x y x në piken , i 1, 2,.... .ix x N

27
Në shënimet e mësipërme për vlerat e indeksit i = 0 dhe i = N+1 fitohen madhësitë
respektive në pikat skajore a dhe b. Në procedimet e mëposhtme do të jetë i
përshtatshëm përdorimi i vektorit me 4(N+1) përmasa
T T T T
1 2 N N+1Y = [Y ,Y , ...,Y ,Y ] .
(2.49)
2.5.3.2 Një metodë numerike e rendit të dytë për zgjidhjen e problemit Euler-
Bernoull
Konsiderojmë identitetin
Y(x+h)=exp(hD)Y(x). (2.50)
Duke përdorur përafrimin Pade (1,1) për termin eksopnencial në ekuacionin (2.50)
fitohet ekuacioni i rendit të dytë
31 1[ ] ( ) [ ] ( ) ( ),
2 2I hD Y x h I hD Y x O h (2.51)
ku I më sipër është matrica identike e rendit të katërt.
Duke zbatuar relacionin e mësipërm për ekuacionin diferencial (2.44) marrim
31 1 1 1[ ( ) ( ) [ ( )] ( ) [ ( ) ( ) ( ) ( )] ( ),
2 2 2 2I hQ x h Y x h I hQ x Y x hP x h Y x h hP x Y x O h
(2.52)
ku më sipër P,Q dhe Y janë respektivisht madhësitë e përcaktuara nga (2.47), (2.46)
dhe (2.45).
Duke zbatuar (2.52) për secilën nga pikat nyje , 0,1,2,..., ,kx k N të rrjetës G fitohet
1 1 1 1[ ],k k k k k k k kA Y B Y E Y F Y 0,1,2,..., ,k N (2.53)
ku më sipër
1 1
1,
2k kA I hQ
1,
2k kB I hQ
1 1
1,
2k kE hP
1,
2k kF hP (2.54)
për k=0,1,....,N, janë matricat katrore të rendit të katërt, kurse ( )k kP P x dhe
( )k kQ Q x llogariten respektivisht nga (2.47), (2.46). Është e qartë se po të
aplikojmë (2.53) për k=0,1,...N dhe (N+1) ekuacionet matricore përkatëse t'i
përmbledhim në një ekuacion matricor të vetëm do të marrim:
AY BY , (2.55)
ku më sipër matricat bllok A dhe B kanë pamjen

28
1 0 1 0
1 2 1 2
2 3 2 3
1
B F
A E
B A , F E
B AN N
A E
B F
A B
1
.
F EN N
(2.56)
Relacioni (2.55) nuk është gjë tjetër veçse një problem i përgjithshëm algjebrik i
vlerave të veta. Kushtet kufitare (2.42) apo (2.43) të problemit diferencial pasqyrohen
në nënmatricat 1 0 1, , ,N NA B E
dhe 0F tek paraqitja (2.56).
2.5.3.3 Një metodë numerike e rendit të katërt për zgjidhjen e problemit Euler-
Bernoull
Nqs në ekuacionin (2.50) përdorim përafrimin Pade (2,2) në vend të atij (1,1) atëherë
fitohet ekuacioni i rendit të katërt
2 2 2 2 51 1 1 1[ ] ( ) [ ] ( ) ( ).
2 12 2 12I hD h D Y x h I hD h D Y x O h (2.57)
Nga derivimi i relacionit diferencial (2.44) marrim
2 ( ) *( ) ( ) *( ) ( ),D Y x Q x Y x P x Y x (2.58)
ku Q*(x) dhe P*(x) më sipër rezultojnë të jenë :
2*( ) ( ) ( )Q x DQ x Q x (2.59)
dhe
*( ) ( ) ( ) ( ) ( ) ( ).P x Q x P x DP x P x Q x (2.60)
Zbatimi i relacioneve (2.44) dhe (2.58) tek (2.57) jep
22
2 2 5
1 1 1 1[ ( ) *( )] ( ) [ ( ) *( )] ( )
2 12 2 12
1 1 1 1[{ ( ) *( )} ( ) { ( ) *( )} ( )] ( ).
2 12 2 12
I hQ x h h Q x h Y x h I hQ x h Q x Y x
hP x h h P x h Y x h hP x h P x Y x O h
(2.61)
Duke zbatuar (2.61) për secilën nga pikat nyje , 0,1,2,..., ,kx k N të rrjetës G në
analogji me paragrafin 2.5.3.2 fitohet një relacion i formës (2.53) por me matrica
përbërëse si më poshtë
2 *
1 1 1
1 1,
2 12k k kA I hQ h Q (2.62)
2 *1 1,
2 12k k kB I hQ h Q (2.63)

29
2 *
1 1 1
1 1
2 12k k kE hP h P (2.64)
(2.65)
Qartazi * *( )k kP P x dhe * *( ).k kQ Q x
Nëse sistemi i ekuacioneve (2.54), tashmë i kompozuar nga matricat bllok (2.62) -
(2.65), përmblidhet (shkruhet) si një ekuacion matricor i vetëm, ai do të kishte pamjen
e problemit të përgjithshëm algjebrik të vlerave të veta (2.55).
2.5.3.4 Një metodë numerike e tipit goditje për zgjidhjen e problemit Euler-
Bernoull
Kompleksiteti algjebrik i zgjidhjes së problemeve diferenciale të rendeve të larta me
anën e MDF është i dukshëm dhe mund të merret me mend edhe nga trajtimi më sipër
me këtë metodë i problemit të moderuar Euler-Bernoull. Metoda numerike e tipit
goditje që do të paraqesim më poshtë ul ndjeshëm vështirësitë e procedimit algjebrik,
është më e lehtë në implementim dhe më afër realitetit fizik të problemit që zgjidhet.
Le të supozojmë se është vlerë e vet reale e problemit (2.41)-(2.42).
Konsiderojmë matricën P4x4
4
2 2
4
1 0 0 0
0 0P=
0 0 1 0
0 0
a b
a b
, (2.66)
në të cilën minori i rendit të dytë i formuar nga elementët a2, b2, a4 dhe b4 kërkohet të
jetë i ndryshëm nga 0.
Le të jetë Yi zgjidhja e problemit Koshi (2.41) me kushte fillestare shtyllën Pi të
matricës P, . Shënojmë me Y(x) zgjidhjen e përgjithshme të problemit (2.41).
Do të kemi:
Y= . (2.67)
Duke vendosur mbi (2.67) kushtet e majta (2.42) mund të bindemi që
= = 0. (2.68)
Me kushtet (2.68) barazimi (2.67) shkruhet në formën
Y=K2Y2+K4Y4. (2.69)
2 *1 1.
2 12k k kF hP h P

30
Duke vendosur mbi (2.69) kushtet e djathta (2.42) fitohet sistemi i 2 ekuacioneve
lineare homogjene përkundrejt të panjohurave K2 e K4 që mund të shkruhet në
formën e përmbledhur:
=0, . (2.70)
Mund të formulojmë pohimin: KMN që problemi (2.41)-(2.42) të ketë zgjidhje të
ndryshme nga zgjidhja e dukshme Y(x) 0 është që përcaktori i matricës që figuron në
anën e majtë të (2.70) të jetë i barabartë me zero (=0).
Shënojmë me X matricën e përmendur më sipër dhe me përcaktorin e saj. Nga
shtjellimi i mësipërm kemi . Në këtë mënyrë problemi i ekzistencës dhe i
gjetjes së zgjidhjes së problemit (2.41)-(2.42) reduktohet në ekzistencën dhe gjetjen e
zgjidhjes së ekuacionit algjebrik:
. (2.71)
Por kuptohet se ne nuk e njohim trajtën analitike të funksionit tek ekuacioni (2.71)
përderisa nuk i njohim analitikisht zgjidhjet Y2i, i = . Supozojmë se zgjidhjet e
mësipërme fitohen numerikisht me një proçedurë standarde numerike, psh, me anën e
kodit matlabik ode45. Për të zgjidhur numerikisht ekuacionin (2.71) veprohet si më
poshtë:
Për vlerën e dhënë të λ llogariten koefiçientët e ekuacionit (2.41) që varen nga λ. Me
anën e kodit ode45.m zgjidhet problemi (2.41) me kushte fillestare respektivisht
shtyllat çift të matricës P4x4 dhe me rreshtat çift të matricës së rezultateve Y4x2 të
fituara formohet matrica X2x2. Struktura specifike e matricës P tek (2.66) kushtëzohet
nga fakti i thjeshtimit të ndjeshëm të zgjidhjes (2.69). Në implementimin që kemi bërë
më poshtë në vend të kushteve të përgjithshme (2.66) kemi marrë për lehtësi P = I4x4.
Në përgjithësi përzgjedhja e konstanteve që figurojnë tek matrica P mund të
orientohet nga ideja e një shkallëzimi të përshtatshëm që mund t‘i bëhet problemeve
të vlerës fillestare të gjeneruara prej P.
Ekuacioni (2.71): , është në fakt një testim i singularitetit të matricës X. Po
sikurse dihet testet = = 0 apo TOL nuk janë të përshtatshme nga pikëpamja
numerike për të testuar singularitetin e një matrice sepse në përgjithësi është e
vështirë të përcaktohet toleranca TOL në mënyrë korrekte. Ndërkaq të ashtëquajturit
numra kushtëzimi të matricës (numri Hadamard, rrezja spektrale e matricës, etj.) janë
tregues më të qënësishëm për këtë qëllim. Në veçanti numri i kushtëzimit
dhe kodi MATLAB cond(X) që shërben për llogaritjen e tij, rezulton

31
mjaft efektiv në testimin e singularitetit të matricës X. Sa më i madh të jetë ky numër
aq më “singulare’ është matrica X. Në implementimin tonë më poshtë ne kemi
ndërtuar funksionin MATLAB num_kusht.m për të llogaritur madhësinë w = -cond(X)
në funksion të λ, pra w = w(λ). Arsyeja e llogaritjes së w është e qartë: Problemi i
zgjidhjes së ekuacionit zëvendësohet me problemin ekuivalent të gjetjes së
minimumit të funksionit w(λ).
Kodi Matlab i skedar-funksionit num_kusht.m ka pamjen:
function w=num_kusht(llanda)
% për llandën e dhënë ky funksion llogarit numrin e kushtëzimit të matricës X
Ya=ode45(problemi_e_b', [0 1], [0 a2, 0 a4]);
Yb=ode45('Problemi_E_B', [0 1], [0 b2, 0 b4]);
X=(1,1)=Ya(end,1);
X=(2,1)=Ya(end,3);
X=(1,2)=Yb(end,1);
X=(2,2)=Yb(end,3);
w= - cond(X);
Skedari i mësipërm plotësohet me skedarin ndihmës problemi_e_b.m që matlabizon
ekuacionin diferencial (2.41). Më pas ekzekutimi i komandës
llanda_min= fmeansearch('num_kusht', llanda0)
jep zgjidhjen e problemit (2.41) - (2.42). Proçedura e mësipërme përshtatet me lehtësi
për zgjidhjen e problemit (2.41) - (2.43).
Vihet re se metoda e përshkruar më sipër zgjidh drejtpërdrejt problemin Euler-
Bernoull të formuluar në (2.41) - (2.42) - (2.43) në kuptimin që gjen vlerën më të
vogël të vet të kërkuar, në kontrast me metodën e diferencave që e redukton
problemin origjinal në problemin e përgjithshëm algjebrik të vlerave të veta.
Proçedurat standarde për zgjidhjen e këtij të fundit gjejnë të gjitha vlerat e veta të
problemit, që janë aq sa është rendi i matricave A dhe B tek (2.55) dhe që praktikisht
nuk kërkohen e nuk nevojiten.
2.5.3.5 Eksperimente numerike
Shembull 2.1. Tek [10] është zgjidhur me një metodë diferencash me rend
konvergjence 2 problemi i mëposhtëm diferencial:
2 2 2 2 4[(1 ) '']'' [(1 ) ']' [(1 ) (1 ) ] 0x y x y x x y , 0<x<1, (2.72)

32
me kushte kufitare
(0) ''(0) (1) ''(1) 0.y y y y (2.73)
Rezultatet numerike përkatëse janë riprodhuar në tabelën e mëposhtme ku janë
pasqyruar vlerat e veta λ në funksion të numrit N (segmenti [0 1] është ndarë në
(N+1) pjesë të barabarta).
Tabela 2.1
Paraqitja e gabimeve relative për 2 mh të shembullit 2.1 sipas metodës së [10]
m N= 2m
-1 λ gabimi relativ
3 7 24.634681 22.448 10
4 15 25.085489 36.068 10
5 31 25.199984 31.497 10
6 63 25.228721 43.563 10
7 127 25.235913 57.125 10
8 255 25.237711 0.00
Në tabelën e mësipërme, si dhe në tabelat analoge në vazhdim, në mungesë të vlerës
teorike (ekzakte) minimale të parametrit λ, për efekt të llogaritjes së gabimit relativ
është konsideruar si vlerë ekzakte e λ vlera e saj e llogaritur për vlerën më të madhe të
N. Pra gabimet relative për vlera të ndryshme të N janë llogaritur me formulën
maxNgabimi relativ
N
N
.
Tek [11] është zgjidhur problemi diferencial (2.72) - (2.73) me metodat e rendeve 2
dhe 4 të përshkruara në paragrafet respektive 2.5.3.2. dhe 2.5.3.3. Rezultatet numerike
përkatëse janë riprodhuar në tabelat respektive 2.2 dhe 2.3.

33
Tabela 2.2
Metoda e rendit të dytë për llogaritjen e vlerës vetjake më të vogël në shëmbullin 2.1
m N λ gabimi relativ
3 7 26.840469032602 26.3477247447894 10
4 15 25.627155371202 21.540314444510110
5 31 25.334813477918 33.8199283840945 10
6 63 25.262391076194 49.5039669500796 10
7 127 25.244328279975 42.3470976789564 10
8 255 25.239813436483 55.5821935357914 10
9 511 25.238635232680 51.112006843007110
10 1023 25.238404579894 0.0
Tabela 2.3
Metoda e rendit të katërt për llogaritjen e vlerës vetjake më të vogël në shëmbullin 2.1
m N λ gabimi relativ
3 7 25.243296971413 41.9756930366577 10
4 15 25.238625220557 51.2463774231586 10
5 31 25.238330362854 77.8083288812536 10
6 63 25.238311888279 84.8827673682084 10
7 127 25.238310732895 93.048698626884110
8 255 25.238310660732 101.8943424606732 10
9 511 25.238310656048 123.8431480220424 10
10 1023 25.238310655951 0.0
Në të njëjtat kushte si më lart kemi implementuar metodën numerike të përshkruar në
paragrafin 2.5.3.4. Për të bërë të mundur korrelimin dhe krahasimin e rezultateve në
vend të kodit standard Matlab ode45 është implementuar metoda e pikës së mesme (e
rendit të dytë) dhe metoda Runge_Kutta klasike (e rendit të katërt). Janë përdorur këto
kode për po ato vlera të N si në rastet e mësipërme. Metoda e rendit të dytë prodhoi
rezultate të të njëjtit rend me ato të tabelës 2.2, por me konstante gabimesh më të

34
larta. Ndërkaq metoda e rendit të katërt, prodhoi rezultate thuajse identike me
metodën analoge të [11]. Rezultatet përkatëse janë paraqitur në të njëjtën tabelë 2.4.
Tabela 2.4: Metoda e rendit të dytë dhe e rendit të katërt për llogaritjen e vlerës
vetjake më të vogël në shembullin 2.1
Metoda e rendit të dytë Metoda e rendit të katërt
m N λ Gabimi relativ λ Gabimi relativ
3 7 26.940464382654 6.317857E-1
25.243297971457 1.975699E-4
4 15 25.697150582982 1.785202E-2 25.238625221607 1.246366E-5
5 31 25.344814594247 4.198496E-3 25.238330362934 7.808343E-7
6 63 25.268391482883 1.186739E-3 25.238311888391 4.883096E-8
7 127 25.244928260043 2.584193E-4 25.238310732927 3.048817E-9
8 255 25.239893497322 5.899446E-5 25.238310660745 1.888002E-10
9 511 25.238685304715 1.112662E-5 25.238310656028 1.901758E-12
10 1023 25.238404483524 0.0 25.238310655980 0.0
Nga 4 tabelat e rezultateve numerike më sipër vihet re se për vlera të mëdha të N
rezultatet e metodës së rendit të katërt janë mjaft më të sakta se rezultatet përkatëse të
fituara nga tri metodat e rendit të dytë. Rezultatet më të dobëta të metodës së rendit të
dytë në tabelën 2.4 janë të shpjegueshme po të kemi parasysh paqëndrueshmërinë
eventuale të problemeve Koshi të gjeneruara prej metodës së tipit goditje. Por duke
pasur parasysh aparatin e fuqishëm të metodave për zgjidhjen e problemit Koshi,
praktikisht rendi i metodës së përshkruar në 2.5.3.4 mund të rritet pa kufizim. Për të
rritur saktësinë në mënyrë optimale mund të përdoret kodi Matlab me hap të
ndryshueshëm ode45. Përsa i përket kohës kompjuterike të zgjidhjes së problemit, për
shumë arsye, metoda e propozuar është mjaft më e shpejtë se metodat e diferencave.

35
2.5.4 Metoda e elementëve të fundëm për zgjidhjen e problemeve kufitare
2.5.4.1 Parime të përgjithshme të zgjidhjes së përafërt
Nga problemet matematike (2.1), (2.2), (2.3) të formuluara në fillim të këtij kapitulli,
këtu po zgjedhim si përfaqësues problemin e parë, meqënëse metoda e elementëve të
fundëm është më e preferuara për zgjidhjen e tij. Ideja qëndrore e ndërtimit të një
zgjidhjeje të përafërt për problemet (2.1) është kërkimi dhe gjetja e një funksioni U të
formës
U = c i i
i=1
m
, (2.74)
ku { i }, i = 1, 2, …, m,… është një sistem i dhënë funksionesh linearisht të
pavarur, të përcaktuar në S, që quhen funksione bazë dhe {ci}, i = 1,…, m, janë
konstante të panjohura që kërkohen.
Sistemi i funksioneve bazë { i } zakonisht zgjidhet i tillë që çdo i të plotësojë po
ato kushte kufitare që plotëson edhe zgjidhja u e problemit diferencial. Në këtë rast
funksioni U do të plotësonte automatikisht kushtet kufitare të problemit. Sistemi { i
} mund të jetë i fundëm ose i pafundëm. Në rastin e pafundëm, sistemi { i }
preferohet të jetë i plotë.
Barazimi (2.4) përbën një klasë tepër të gjerë e të përgjithshme metodash të përafërta.
Specialitetet e veçanta të tyre përcaktohen nga mënyrat e veçanta të zgjedhjes së
funksioneve bazë i , ose nga mënyrat e ndryshme të përcaktimit të konstanteve të
panjohura ci, i = 1,…m. Lidhur me mënyrën e përcaktimit të konstanteve ci dallohen
2 tipe metodash:
A. Metoda variacionale
Sipas kësaj metode problemi diferencial (2.1) transformohet fillimisht në një problem
ekuivalent variacional, kur kjo gjë është e mundur. Në përgjithësi një problem
variacional konsiston në gjetjen e një funksioni u që minimizon ose maksimizon një
funksional I(u). Tipi më i përdorur i funksionalit është ai integral. Këtu do të na
interesoje funksionali integral 1-përmasor i trajtës:
I(u) = F(x, u,u u dxx
x
1
2
, ) , (2.75)
ku u(x) është funksion me derivat të dytë u’’(x) të integrueshëm në [x1 x2].
Varianti analog 2-përmasor ka trajtën

36
I(u) = F(x,y,u,u u u u u dxdyx y xx xy yy
D
, , , , ) . (2.76)
Për të thjeshtuar simbolikën, një funksional çfarëdo 3-përmasor po e shkruajmë
thjesht në formën
I(u) = F(u)dxdydz
, (2.77)
duke nënkuptuar F si funksion të u dhe të derivateve të pjesshme të tij.
Problemi variacional lidhur me funksionalin (2.77) mund të formulohet: Të gjendet
funksioni u nga bashkësia e funksioneve për të cilën funksioni F(u) është i
integrueshëm në , i tillë që funksionali (2.77) të marrë vlerën minimum.
Transformimi variacional i një problemi diferencial konsiston në ndërtimin e një
problemi variacional, zgjidhja e vetme e të cilit është po ajo e problemit diferencial.
Transformimi i problemit diferencial (2.1) në një problem ekuivalent variacional dhe
gjetja e ndërtimi konkret i funksionit F(u) dhe integralit I(u) më sipër, në përgjithësi
është problem i vështirë dhe i pazgjidhur përfundimisht. Pohimi i mëposhtëm jep një
pamje të pjesshme të problemit:
Kusht i nevojshëm për minimizimin e funksionalit (2.75), respektivisht (2.76), është
plotësimi i ekuacionit Euler- Lagranzh:
F
u
d
dx
F
u+
d
dx
F
u= 0
2
2
, (2.78)
respektivisht
F
u x
F
u y
F
u+
x
F
u+
xy
F
u+
y
F
u= 0
x y
2
2xx
2
xy
2
2yy
(2.79)
Dy ekuacionet Euler-Lagranzh (2.78) dhe (2.79) më sipër janë ekuacione diferenciale
që funksioni u(x) duhet të plotësojë. Por vemë në dukje se jo në çdo rast zgjidhja u e
ekuacionit Euler-Lagranzh mund të jetë zgjidhja minimale e problemit variacional
origjinë, pasi ky ekuacion përbën vetëm një kusht të nevojshëm por jo të mjaftueshëm
për minimizimin e funksionalit variacional. Në përgjithësi, është e nevojshme të
verifikohet nëse zgjidhja u e gjetur prej ekuacionit Euler-Lagranzh, është vërtet një
minimum i funksionalit variacional, por në praktikë kjo është disi e vështirë. Shpesh
konsideratat fizike përdoren për këtë qëllim. Ndërkaq, problemi i anasjelltë, i
transformimit të një problemi diferencial të dhënë, në një problem variacional

37
ekuivalent, është më i vështirë dhe teorikisht është një problem i pazgjidhur. Vetëm
për klasa të caktuara e standarde ekuacionesh diferenciale (2.1), teoria ka përpunuar e
gjetur variantin variacional. Në shumë zbatime praktike parimet variacionale marrin
kuptime fizike të caktuara, si p.sh. parimi i minimumit të energjisë në problemet e
teorisë së elasticitetit apo mekanikën e trupit të ngurtë. Në këto raste forma
variacionale e problemit mund të jetë po aq evidente në formulim, sa ajo diferenciale.
Në përgjithësi alternativa variacionale e një problemi diferencial është më e thjeshtë
dhe më e manipulueshme matematikisht se problemi diferencial ekuivalent, sepse
rendi i derivateve që figurojnë nën integralin variacional është më i ulët se ai i
ekuacionit diferencial.
Duke zëvendësuar (2.74) tek (2.77) do të kemi
I(U) = I(c1,…, cm).
Kushtet e nevojshme të ekstremum-minimumit të I(c1,…, cm) janë:
I
c= 0
i
, i = 1,…,m. (2.80)
Sistemi algjebrik (2.80) është linear n.q.s. problemi diferencial (2.1) është i tillë.
B. Metoda e mbetjeve të peshuara.
N.q.s. zëvendësojmë funksionin U të përcaktuar sipas (2.74) tek problemi diferencial
(2.1) në përgjithësi do të kemi:
AU f në
dhe BU = g në S.
(Këtu është supozuar që funksionet i , i = 1,…,m, plotësojnë kushtet kufitare të
problemit (2.1), për rrjedhojë edhe funksioni U, i plotëson këto kushte). Shënojmë me
R diferencën
R(U) = AU - f në .
Funksioni R(U) quhet mbetje ose gabim i zgjidhjes së përafërt U. Në çdo pikë të
zonës , mbetja R(U) jep madhësinë me të cilën zgjidhja e përafërt U dështon të
plotësojë problemin diferencial (2.1) në atë pikë.
Kuptohet nga më lart se
R = R(U) = R(c1,….cm).
Është e kuptueshme që përcaktimi i koefiçientëve c1,…,cm më sipër do të udhëhiqet
nga logjika e minimizimit të mbetjes R.

38
Metoda e mbetjeve përcakton konstantet c1,…, cm sipas kriterit të minimizimit të
mbetjes R, ose zvogëlimit të saj deri në një tolerancë të përcaktuar dhe paracaktuar
nga përdoruesi. Konsiderojmë gabimin integral (shumor) të peshuar, me peshë
funksionin peshues W, të gabimit R në zonën :
I(U) = WRd = W[AU-f]d
. (2.81)
Shprehja e mësipërme konsiderohet si relacioni themelor i metodës së mbetjeve të
peshuara.
Krahas sistemit të funksioneve bazë { i }, zgjidhet sistemi i funksioneve peshues
{Wi}, i = 1,…, m, të përcaktuar dhe linearisht të pavarur në dhe vendosen kushtet
që mbetja e peshuar (2.81) të bëhet zero për secilin funksion Wi, pra
W Rd = W [AU - f]d =0i i
, i = 1, 2,…,m. (2. 82)
Që këtej del se në një farë kuptimi R 0 .
Ekuacionet algjebrikë (2.82) zgjidhen përkundrejt Ci dhe pastaj me anën e (2.74)
fitohet zgjidhja e përafërt U.
N.q.s. heqim dorë nga kërkesa që sistemi i funksioneve bazë {i} të plotësojë
kushtet kufitare të problemit (2.1) atëherë mbetja R(U) do të kishte formën:
AU-f në
R(U)=BU-g në S
Në këtë rast krahas sistemit të funksioneve peshues {Wi} në , zgjidhet sistemi i
funksioneve peshues {Vi} në S, dhe relacioni bazë (2.82) merr formën:
W [AU - f]d + V BU - g]ds = 0i i
S
[ , i = 1,…,m. (2.83)
Kuptohet se në varësi të mënyrave të shumta të zgjedhjes së funksioneve bazë { i },
funksioneve peshues {Wi} e {Vi} dhe në varësi të teknikave të trajtimit të mbetjeve të
peshuara {WiR} e {ViR}, kemi një varietet të gjerë metodash të tipit mbetje.
Për shumë probleme lineare të formës (2.1), bile edhe për disa raste jolineare, teoria
ka vërtetuar ([19]) se R(U) 0 kur m . Megjithatë, studimet teorike mbi
konvergjencën dhe kufijtë e gabimeve në metodat e tipit mbetje janë mjaft të pakta.

39
2.5.4.2 Parime të përgjithshme të metodës së elementëve të fundëm - kontekst një
- përmasor
Metoda e elementëve të fundëm (MEF) mund të shikohet si një nënklasë e veçantë e
metodave të tipit (2.74). Zona S ndahet në elemente. Për çdo element zgjidhet
një numër i njëjtë pikash nyje (pikat më të shquara të elementit). Për çdo nyje i,
i=1,...,m, zgjidhet një funksion forme Ni që do të jetë një splain linear, ose dy
funksione forme Ni0(x) dhe Ni1(x) që do të jenë dy splaine kubike, ose më tej akoma.
Konstantet ci në metodën e elementëve të fundëm përkojnë të jenë vlera të zgjidhjes
së kërkuar u dhe/ose të derivateve të saj, në një bashkësi pikash të zonës S. Për
synimet e këtij studimi po paraqesim shkurtimisht ilustrime për rastin 1-përmasor të
MEF.
Figura 2.2: Funksionet e formës për segmentin [a,b] me 5 elementë.
Funksioni i formës Ni që i korrespondon nyjes xi, i = 1,…,4, në fig. 2.2, analitikisht
shkruhet:
Ni(x) =
i-1i-1 i
i i-1
i+1i i+1
i i+1
i-1 i+1
x-x x [x , x ]
x x
x-x x [x , x ]
x x
0 x [a,x ] [x , b]
Formula e mësipërme mund të përshtatet për funksionet e formës N0(x) dhe N5(x), që
i përgjigjen nyjeve skajore x0 dhe x5.
Funksionet e formës Ni(x) më sipër janë splaine lineare (të rendit të parë). Në vend të
tyre mund të përdoren splainet kubike (dy splaine për çdo nyje), Ni0(x) dhe Ni1(x).
Forma analitike e këtyre të fundit jepet më poshtë.

40
Ni0(x) =
x - x
x x2
x - x
x x+ 1 x [x x
x - x
x x2
x - x
x x+ 1 x [x x
x [a, x x b]
i
i i-1
2
i
i i-1
i-1 i
i
i+1 i
2
i
i+1 i
i i+1
i-1 i+1
3
3
0
, ]
, ]
] [ ,
Ni1(x) =
x - x
x x
x - x
x x x [x x
x - x
x x
x - x
x x x [x x
x [a, x x b]
i
i i-1
2
i
i i-1
i-1 i
i
i+1 i
2
i
i+1 i
i i+1
i-1 i+1
1
1
0
, ]
, ]
] [ ,
Relacioni (2.74) që jep zgjidhjen e përafërt të problemit në MEF merr formën
U = u Ni i
i=1
m
S. (2.84)
Mund të verifikohet lehtë se ky relacion i fundit përbën një interpolim splain linear të
funksionit u në zonën S. Në rastin 1-përmasor ky interpolim paraqitet në Fig. 2.3.
Në rast se për çdo nyje xi do të zgjidheshin si funksione forme splainet kubike Ni0 dhe
Ni1 atëherë në vend të interpolimit splain (2.84) do të kishim interpolimin Hermitian
të formës:
U = u Ni i0
i=1
m
+ u Ni 1i
i=1
m
S. (2.85)
Koefiçientët e panjohur ui tek paraqitja e përgjithshme (2.84) (apo ui dhe ui’ tek
paraqitja e veçantë 1-përmasore (2.85)), përbëjnë të ashtëquajturën fushë të variableve
nyjore. Konçidenca e tyre me vlerat e funksionit të kërkuar u (apo të derivateve të tij)
në pikat nyje përbën një veçanti tjetër themelore të metodës së elementëve të fundëm.

41
Figura 2.3: Funksioni u(x) dhe interpolanti splain i tij UM(x)
Për të finalizuar një metodë të elementeve të fundme relacioni (2.84) apo (2.85)
zëvendësohet në ekuacionin (2.77) apo (2.83), sipas tipit të metodës së zgjedhur:
Metoda Ritz që është metodë variacionale ose metoda Galerkin që është e tipit mbetje.
Përfundimisht zgjidhja e problemit diferencial (2.1) me cilëndo nga metodat e
elementëve të fundëm më sipër sillet në zgjidhjen e një sistemi ekuacionesh
algjebrike, lineare ose jolineare, me të panjohur koefiçientët ui (apo edhe ui’) në
paraqitjet (2.84) apo (2.85). Secili ekuacion përmban vetëm një pjesë të vogël të të
panjohurave të sistemit. Si rrjedhim në rastin linear matrica e sistemit algjebrik është e
rrallë dhe në përgjithësi matricë bandë.
Vemë në dukje se në zbatimin konkret të metodës së elementëve të fundëm
janë në dorën e përdoruesit dhe varen nga problemi konkret këto elementë:
a) Tipi ose forma e zgjedhur e elementit,
b) Numri i elementëve M,
c) Numri i nyjeve për çdo element s,
d) Forma e zgjedhjes së nyjeve për çdo element,
e) Funksionet e formës për çdo nyje dhe tipin e zgjedhur të elementëve,
f) Metoda e elementëve të fundëm e zgjedhur, që mund të jetë variacionale
apo e tipit mbetje.

42
2.5.4.3 Zgjidhja e problemit kufitar me metodën Galerkin
Për shkak të kompleksitetit llogaritës algjebrik një zbatim konkret të metodës
Galerkin, po e realizojmë nëpërmjet problemit kufitar të thjeshtuar:
2
2
d u-u=-x,
dx 0 1 x , u(0) = 0 dhe u(1) = 0 . (2.86)
Relacioni themelor (2.81) i metodës së mbetjeve të peshuara merr formën
1 2
2
0
d UI(U)= W -U+x dx
dx
. (2.87)
Nëse integrojmë me pjesë komponenten e parë më sipër (atë me derivatin e rendit më
të lartë), relacioni i "fortë" i mbetjeve të peshuara merr formën e "zbutur"
11
0 0
dW dU dUI(U)= - -WU+xW dx+ W =0
dx dx dx
, (2.88)
formë në të cilën funksioni U kërkohet të jetë një herë i derivueshëm, jo dy herë si në
ekuacionin (2.87).
Zëvendësojmë në relacionin e mësipërm funksionin U sipas barazimit (2.84):
i+1
i
1x 1n
1 x 0 0
dW dU dUI(U)= - -WU+xW dx W =0
dx dx dx
, (2.89 )
ku n është numri i elementeve. Shqyrtojmë elementin e te
i i+1i : [x x ] , ( i=1,2,3,...,n
). Funksioni U në segmentin [xi xi+1] ka trajtën
i+1 i
i i+1 i i i+1 i+1
i+1 i i+1 i
x -x x-xU = u + u = N (x)u +N (x)u
x -x x -x.
Në metodën Galerkin merret Wi(x) = Ni(x), i = 1, 2, ...., n.
Duke bërë zëvendësimet dhe kryer veprimet në shprehjen
i+1
i
x
x
dW dU- -WU+xW dx
dx dx
marrim paraqitjen
i+1 i+1
i i
'x x
i' 'i i i
i i+1 i i+1'
x xi+1i+1 i+1 i+1
uN N NN N + N N dx + x dx
uN N N
,
ku ' i
i
dNN =
dxdhe
' i+1
i+1
dNN =
dx.
Pas llogaritjes së integraleve dhe disa veprimeve në paraqitjen e fundit marrim

43
1
11
1 1( 2 )
3 6 6
1 1(2 2 )
6 3 6
i i ii i i
i i
i i ii ii
i i
h h hu x xh h
h h hx xu
h h
(2.90)
Supozojmë p.sh. se n = 3. Shprehja (2.90) e shkruar për çdo element rezulton:
Elementi 1
1
2
3.111 2.9444 0.0185
2.9444 3.111 0.0370
u
u
Elementi 2
2
3
3.111 2.9444 0.0741
2.9444 3.111 0.0926
u
u
Elementi 3
3
4
3.111 2.9444 0.1296
2.9444 3.111 0.1481
u
u
Duke përmbledhur të treja shprehjet në një relacion të vetëm matricor marrim
sistemin:
1
2
3
4
0.00001 0 0 0
2.9444 6.222 2.9444 0 0.11110
0 2.9444 6.22 2.9444 0.2222
0 0 0 1 0.0000
u
u
u
u
.
Nga zgjidhja e sistemit gjejmë 10.0u ,
20.0448u ,
30.0569u dhe
40.0u
Eshtë e lehtë tani të vemë re se për problemin e përgjithshëm
u (x)+p(x)u (x)+q(x)u(x)=f(x), a x b
u(a)=0, u(b)=0
formulimi i "zbutur" (2.88) merr formën
b b
a a
dW dU dU- +Wp(x) +Wq(x)U dx= fWdx
dx dx dx
dhe procedimet e mëtejshme vazhdojnë për analogji. Ne kemi imlementuar në Matlab
metodën Galerkin për problemin e mësipërm. Rezultate numerike jepen në paragrafin
që pason. Kodet përkatës Matlab janë paraqitur në shtojcën e këtij punimi.
2.5.4.4 Analizë krahasuese e metodave bazë nëpërmjet eksperimentit numerik
Në këtë paragraf nëpërmjet problemit të thjeshtë kufitar:

44
y’’ = 3y’ - 2y + 1, y(0) = 0, y(1) = 0 (2.91)
me zgjidhje analitike të njohur:
2
1 2
1y( )
2
x xx c e c e , ku 1
1/ 2
exp(1)c , 2
1 11
2 exp(1)c
do të testojmë 3 nga metodat bazë numerike që kemi përshkruar: Metodën Galerkin të
paragrafit më siper, MDF të paragrafit 2.5.3. dhe metodën e goditjes të paragrafit
2.5.1.1 Për koherencë do të përdorim të njëjtin coptim të segmentit të integrimit për të
tre metodat. Po kështu për koherencë është përzgjedhur metoda e pikës së mesme për
zgjidhjen e problemeve Koshi që gjeneron metoda e goditjes, që është me rend 2,
sikurse MDF e përzgjedhur.
Metodat janë testuar për tre coptime të ndryshme të segmentit të integrimit. Saktësia e
secilës metodë është vlerësuar me anën e normës L .
max (Y )N j N j
jL y Y y .
Rezultatet numerike të saktësisë për secilën metodë në funksion të numrit të
elementëve apo intervaleve të coptimit N janë paraqitur në tabelën 2.5 më poshtë.
Tabela 2.5: Gabimet sipas normës L të tri metodave bazë të integrimit numerik
N Metoda Galerkin MDF Metoda e goditjes
10 4.5593E-004 1.0678E-003 1.1000E-003
40 3.0706E-005 7.6500E-005 7.3450E-005
100 4.9871E-006 1.2609E-005 1.1991E-005
Rezultatet e mësipërme janë paraqitur dhe analizuar në [18]. Nga rezultatet e
mësipërme vihet menjëherë re rendi i njëjtë i saktësisë së tre metodave. Por ndërsa
metoda MDF dhe ajo e goditjes kanë thuajse të njëjtën konstante gabimi (pra janë gati
ekuivalente), metoda Galerkin e ka konstanten e gabimit rreth 2.5 herë më të vogël.
Mund të shprehemi se metoda Galerkin është konvencionalisht 2.5 herë më e saktë se
dy metodat e tjera. Figura e mëposhtme paraqet grafikisht zgjidhjen teorike dhe
rezultatet numerike të MDF për N = 40.

45
Fig. 2.4: Krahasimi i zgjidhjes teorike me atë të MDF për problemin (2.91)
2.5.4.5 Zgjidhja e problemit kufitar (2.8) - (2.9) me Metodën Rayleigh - Ritz
Po riformulojmë problemin kufitar të paragrafit 2.4.2
Të gjendet funksioni u(x) që kënaq ekuacionin diferencial
d
dxp(x)
dy
dxq(x)y = f(x)+( ) , x[0,1], (2.8)
me kushte kufitare
y(0) = y(1) = 0. (2.9)
Me kushtet: p C1[0,1], q, f C[0,1], p(x) 0 dhe q(x) 0 problemi
(2.8)-(2.9) ka zgjidhje të vetme.
Sikurse përmendëm më lart, n.q.s. një problem i vlerës kufitare përshkruan një
fenomen fizik, atëherë zgjidhja e tij kënaq një veti të caktuar variacionale. Kjo gjë
ndodh edhe me problemin e përkuljes së traut që përshkruhet prej ekuacionit
diferencial (2.8)-(2.9).

46
Teorema 2.3 (Forma variacionale e problemit (2.8)-(2.9))
Funksioni y(x)C 0
2 , është zgjidhje e vetme e problemit (2.46)-(2.47), atëherë dhe
vetëm atëherë kur y(x) është i vetmi funksion nga bashkësia e funksioneve
{u(x) | u(x)C 0
2 [0,1]},
që minimizon integralin
1
I(u) = {p(x)[u’(x)]2 + q(x)[u(x)]
2 -2f(x)u(x)}dx. (2.92)
0
Metoda Rayleigh - Ritz për zgjidhjen e problemit (2.8)-(2.9), mbështetet mbi
parimin variacional të tij. Por në procedurën Rayleigh - Ritz, integrali I(u) nuk
minimizohet në bashkësinë e gjerë {u(x)} që jep Teorema 3.2, por në bashkësinë
{c11 + … + cnn}, që është bashkësia e kombinimeve lineare të një sistemi
funksionesh bazë {i}, i = 1,…, n. Sistemi {i} i metodës Rayleigh - Ritz plotëson po
ato kushte kufitare që plotëson zgjidhja y(x), pra
i(0) = i(1) = 0, për i = 1, 2,…, n.
Shënojmë me
n (x) = c11 + c22 + … + cnn =cii.
i=1
Duke zëvendësuar (x) tek (2.92) do të kemi
n
I() = I(cii) = I(c1, c2,…, cn). (2.93)
i=1
Kushtet e nevojshme të ekstremum-minimumit të I() tek (2.93) janë:
I / cj = 0, j = 1, 2,…, n. (2.94)
Barazimet (2.94) pas kryerjes së disa veprimeve algjebrike marrin trajtën:
n 1 1
[ {p(x)i’(x)j’(x) + q(x)i(x)j(x)}dx]ci = f(x)j(x)dx. (2.95) i=1 0 0
j = 1, 2,…, n.
Veçoria e parë dalluese e Metodës Rayleigh - Ritz është mënyra e veçantë e zgjedhjes
së bazës {i}. Dallohen dy raste.
Rasti a: Funksionet bazë pjesë-pjesë lineare
Segmenti i integrimit [0,1] ndahet në n+1 pjesë çfarëdo me anën e nyjeve
0 = x0 x1 … xn xn+1 = 1, hi = xi+1 - xi.

47
Funksionet 1(x),…, n(x) zgjidhen si më poshtë:
i(x) =
0 x x
x x
h x x x
x x
h x x x
x x 1
i-1
i 1
i 1
i-1 i
i+1
i
i i+1
i+1
0
0
(2.96)
i = 1, 2, …,n
Nga (2.96) nxjerrim
i’(x) =
0 x x
1
h x x x
h x x x
x x 1
i-1
i 1
i-1 i
i
i i+1
i+1
0
1
0
(2.97)
i = 1, 2, …,n.
Pas zëvendësimeve të (2.96) dhe 2.97) tek (2.95) dhe pas kryerjes së veprimeve në
analogji me metodën Galerkin sistemi linear (2.51) reduktohet në një sistem linear
tridiagonal të formës:
Ac = b , (2.98)
meqënëse i(x) dhe i’(x) janë jo zero vetëm për x [xi-1, xi+1].
Tregohet se matrica tridiagonale A është simetrike dhe pozitivisht e përcaktuar.
Elementët jo zero të A, (aii , ai,i+1 dhe ai,i-1) dhe elementët e b llogariten me formula
kuadraturash si funksione të p(x), q(x), i(x), i’(x) dhe f(x). Zgjidhja e përafërt
n
(x) = c11 + c22 + … + cnn = cii
i=1
plotëson kushtin
|(x) - y(x)| = O(h2), x[0,1].
Rasti b: Funksionet bazë K-kubik
Segmenti i integrimit [0, 1] ndahet në n+1 pjesë të barabarta me anën e rrjetit të
nyjeve xi = ih, për i = 0, 1,…, n+1, ku h = 1/(n+1). Për çdo nyje xi, i = 0, 1,…, n+1,
ndërtohet K-kubiku e vet shoqërues Si trajta e të cilit është:

48
Si(x) =
0
2
24
1
6 4
1
6
2
24
1
6 4
2
24
1
3 3 3 3
3 3 3
3
x x
x - x
h
x - x
h
x - x
h
x - x
h x x x
x - x
h
x - x
h
x - x
h x x x
x - x
h
x - x
h
i-2
i i i i
i-2 i-1
i i i
i-1 i
i i
3
3
6
2
24
0
x x x
x - x
h x x x
x x
i i+1
i
i+1 i+2
i+2
Që të kenë kuptim formulat e mësipërme për K-kubikët S0, S1, Sn, Sn+1, përcaktohen
nyjet fiktive x-2 = -2h, x-1 = -h, xn+2 = (n+2)h, xn+3 = (n+3)h.
Një K-kubik tipik Si(x) është paraqitur në figurën 2.5.
Figura 2.5: K-kubiku tipik Si
Mund të tregohet që sistemi {Si} është linearisht i pavarur.
Vihet re se K-kubikët Si(x) mund të shprehen me anën e një kubiku të përgjithshëm
S(x) në formën
Si(x) = Sx - x
hi
, i = 0, 1,…, n+1,
ku K-kubiku S(x) ka formën

49
S(x) =
0
24 6 4 6
24 6 4
24 6
24
0 2
3 3 3
3 3
3 3
3
x -2
2 - x 1- x x 1+ x - 2 x -1
2 - x 1- x x - 1 x -0
2 - x 1- x 0 x 1
2 - x 1 x 2
x
3
3
Me qëllim që K-kubikët Si të plotësojnë kushtet kufitare i(0) = i(1) = 0, i = 0,
1,…, n+1, është e nevojshme të modifikohen si më poshtë K-kubikët skajorë S0, S1,
Sn, Sn+1. Me këtë modifikim, përfundimisht sistemi i funksioneve bazë është:
i(x) =
S x) - 4Sx + h
h i = 0
S x) - Sx + h
h i = 1
S (x) 2 i n - 1
S x) - Sx - (n + 2)h
h i = n
S x) - 4Sx - (n + 2)h
h i = n + 1
0
1
i
n
n+1
(
(
(
(
(Shiko fig. 2.6)
Figura 2.6: Funksionet bazë skajorë 0, 1, n, n+1
Meqënëse i(x) dhe i’(x) janë jo zero vetëm për x [xi-2, xi+2], atëherë matrica e
sistemit linear (2.51), është një matricë shtatëdiagonale e formës:

50
(2.99)
ku
ai,j = 1
0
{p(x)i’(x)j’(x) + q(x)i(x)j(x)}dx,
për çdo i,j = 0, 1,…,n+1. Matrica A është pozitivisht e përcaktuar, kështu që sistemi
linear (2.92) mund të zgjidhet me anën e metodës Choleski.
Me supozimet e bëra në hyrje të këtij paragrafi, për funksionet p(x), q(x), f(x),
garantohet që
|(x) - y(x)| = O(h4), x[0,1].
Metoda Rayleigh - Ritz e përshkruar më lart mund të përdoret me tipe të tjera
funksionesh bazë, përveç atyre që u trajtuan në rastet a dhe b më sipër. Polinomet
pjesë-pjesë kubik të Hermitit përbëjnë një nga tipet e përdorur shpesh në praktikë. Një
trajtim i hollësishëm i këtij rasti gjendet tek [19].
Padyshim që problemi i vlerës kufitare (2.46)-(2.47) mund të zgjidhet drejtpërdrejt me
metodën e Galerkinit të paragrafit 2.5.4.3. Këtu është interesante të shënohet se
metoda e Galerkinit, në thelb e ndryshme nga metoda Rayleigh - Ritz, në zgjidhjen e
problemit (2.8)-(2.9), çon në të njëjtin sistem ekuacionesh (2.95). Për probleme të
tjera të vlerës kufitare një gjë e tillë nuk ndodh, pra problemi (2.8)-(2.9) përbën një
pikë takimi të dy metodave.

51
Algoritmi 2.2 (Metoda Rayleigh-Ritz, me funksione bazë K-kubik)
Të dhëna: Problemi i vlerës kufitare
d
dxp(x)
dy
dxq(x)y = f(x)+( ) , x[0,1], y(0) = y(1) = 0
n - numri i nyjeve të brendshme
Rezultate: Përcaktohen koefiçientët ci në përafrimin e zgjidhjes
n
(x) = cii
i =1
Llogaritje: 1. h = 1/(n+1), për i = 0,…,n+1 përcaktohen xi = ih
2. Përcaktohen funksinet S(x) dhe i(x) si më sipër
3. Për i = 0, 1,…, n+1 kryhen veprimet 4-7
4. Për j = i, i+1,…,min(i+3, n+1)
L = max(xj-2, 0)
U = min(xi+2, 1)
Llogariten numerikisht integralet:
U
ai,j = {p(x)i’(x)j’(x) + q(x)i(x)j(x)}dx
L
aji = aij (meqënëse A është simetrike)
5. N.q.s. i 4 atëherë për j = 0,…,i-4 bëj aij = 0
6. N.q.s. i n-3 atëherë për j = i+4,…,n+1 bëj aij = 0
7. L = max(xi-2, 0)
U = min(xi+2, 1)
bi = f(x)L
U
i(x)dx
8. Zgjidhet sistemi Ac = b, ku A = (aij), b = (b0,…, bn+1)T
dhe c = (c0,…, cn+1)T
9. Për i = 0,…, n+1 nxirr (ci);
10. FUND.

52
KAPITULLI 3
Zgjidhje numerike për dy probleme kufitare-fillestare speciale
Ekuacionet diferenciale me derivate të pjesshme përbëjnë një nga mjetet më të
fuqishme të matematikës për studimin e proceseve fizike. Nga pikëpamja praktike
metodat numerike për zgjidhjen e këtyre ekuacioneve janë bërë një mjet i
pazëvendësueshëm për zgjidhjen e shumë problemeve industriale dhe një zonë e
hapur takimi e bashkëpunimi midis matematicienëve, informaticienëve, fizikantëve
dhe specialistëve të fushave të ndryshme inxhinierike.
Në këtë kapitull do të trajtohen dy probleme diferenciale speciale në ekuacionet
me derivate të pjesshme, që njëkohesisht përbëjnë dhe modelime inxhinierike të
mirënjohura dhe të studjuara intensivisht në literaturën e specialitetit. Metoda dhe
teknika të posaçme numerike do të përdoren për zgjidhjen e dy problemeve të
shtruara.
3.1 Zgjidhje numerike e një ekuacioni valor që modelon lëkundjet e linjave të
tensionit të lartë
Në këtë paragraf do të zgjidhet numerikisht një problem diferencial valor me shuarje
kufitare, që ndeshet në studimin e fenomenit fizik të lëkundjeve në linjat e tensionit të
lartë dhe në struktura të tjera fleksible. Modeli fizik është ai i një korde njëri skaj i së
cilës qëndron i fiksuar, kurse skaji tjetër lidhet me një sistem që gjeneron lëkundje,
me koefiçient shuarje të vogël. Modeli matematik është një problem i vlerës fillestare-
kufitare për një ekuacion diferencial jolinear të dobët me kushte kufitare jo klasike.
Metoda numerike e propozuar është një kombinim i metodës së karakteristikave
me teknikën e ekstrapolimit Richardson. Metoda shfrytëzon rrjetin specifik të nyjeve
që gjenerojnë kurbat karakteristike të ekuacionit si dhe veçoritë e kushteve fillestare-
kufitare të problemit.
3.1.1 Shtrimi dhe formulimi matematik i problemit
Mjaft struktura fleksible (linjat e tensionit të lartë, urat e varura, ngarkesat dinamike
në sustat helikoidale, po përmendim vetëm disa prej tyre), janë subjekt i lëkundjeve
për shkaqe nga më të ndryshmet. Modelet matematike që përshkruajnë dinamikën e
këtyre lëkundjeve janë probleme diferenciale të vlerave fillestare-kufitare të tipit valor

53
[22], [23], [24], [25], [26], ose të tipit kordë [27], [28]. Ekuacionet diferenciale
përkatëse në këto modele janë të rendeve 2 dhe 4, lineare ose jo lineare, me kushte
kufitare në përgjithësi jo klasike. Në disa struktura fleksible (si tek linjat e tensionit të
lartë ose kabllot e varura) erëra të tipeve të ndryshme mund të shkaktojnë vibracione
mekanike. Shtjellat e ajrit, për shembull, zakonisht shkaktojnë lëkundje me frekuencë
të lartë dhe amplitudë të vogël, ndërsa ngarkesa masive e borës dhe e akullit në
kabllot e tensionit shkakton lëkundje me frekuencë të ulët dhe amplitudë të madhe.
Lëkundja (e padëshirueshme gjithsesi) ka si rrjedhojë në çdo rast lodhjen e
materialeve të strukturës fleksible dhe eventualisht dëmtimin e saj, kështu që për
zbutjen apo shuarjen e lëkundjes në praktikë përdoren tipe të ndryshme shuarësish,
[24], [31] dhe [33].
Veçanërisht dinamika jolineare e linjave të tensionit të lartë dhe kabllove të
varura është mjaft e komplikuar dhe vazhdon të tërheqë vëmendjen e studjuesve deri
në vitet e fundit [31], [32].
Modeli që do të analizojmë dhe zgjidhim këtu është ai i lëkundjeve të një korde
me gjatësi të standartizuar π, të fiksuar në pikën x = 0 dhe të lidhur me një sistem
dashpot në pikën x = π. Ky model i nxjerrë dhe i analizuar hollësisht në [22]
formulohet:
Të gjendet funksioni u(x, t) që kënaq ekuacionin
31- - , 0 , 0,
3tt xx t tu u u u x t
(3.1)
me kushte kufitare
,0,0,0 ttu (3.2)
,0,,, ttutu tx (3.3)
dhe kushte fillestare
,0,0, xxxu (3.4)
,0 , 0 .tu x x x (3.5)

54
Funksionet (x) dhe (x) më sipër janë respektivisht zhvendosja dhe shpejtësia
fillestare e kordës, është parametri shuarës (amortizues) positiv, kurse 0 < << 1
është madhësi e vogël pa dimensione.
Më sipër është supozuar së shuarja (amortizimi) e lëkundjes nga sistemi dashpot
është proporcionale me shpejtësinë vertikale të skajit të djathtë të kordes, po t’i
referohemi kuptimeve fizike të profilit të kordes u(x, t0) në momentin e çfarëdoshëm
të kohës t0, si dhe kuptimeve të derivateve ux(π, t0) dhe ut(π, t0). Një model i ngjashëm
është analizuar në [23], ku është supozuar se shuarja e sistemit dashpot është
proporcionale si me shpejtësinë vertikale të skajit të djathtë të kordës ashtu dhe me
shpejtësinë këndore të kordës në skajin e djathtë të saj. Tipe dhe modele të ndryshme
fizike shuarësish diktojnë modifikimin e kushtit (3.3) më sipër. Në këtë kontekst një
nga objektivat e studimit të modelit (3.1-3.5) është gjetja e atyre vlerave të parametrit
shuarës për të cilat zgjidhja shkon në zero ose drejt një funksioni të kufizuar
kur t shkon në infinit.
Nëqoftëse sistemi dashpot instalohet në të dy skajet e kordës atëherë edhe kushti
i majtë kufitar (3.2) duhet modifikuar në mënyrë të përshtatshme.
Në [22], duke përdorur një aparat të ndërlikuar matematik, është treguar
ekzistenca, uniciteti dhe qëndrueshmëria e zgjidhjes së problemit të mëposhtëm:
,0,0, txucuuu ttxxtt (3.6)
,0,0,0 ttu (3.7)
,0,,, ttutu tx (3.8)
,0,0, 0 xxuxu (3.9)
1,0 , 0 .tu x u x x (3.10)
Duke qënë se problemi (3.1) – (3.2) – (3.3) – (3.4) – (3.5) është rast i veçantë i
problemit (3.6) – (3.7) – (3.8) – (3.9) – (3.10), rrjedh menjëherë se ai ka zgjidhje të
vetme dhe të qëndrueshme, pra ky problem është shtruar në mënyrë korrekte.
Metoda e Galerkinit dhe ajo turbulente janë dy nga metodat më të përdorura në
literaturë [22], [23], [24], [25], [26], [27], [28] për ndërtimin e përafrimeve të
zgjidhjeve të problemeve valore. Metoda e transformimit të Laplasit është përdorur
me sukses tek [22] për ndërtimin analitik të përafrimeve të zgjidhjes së variantit linear

55
që fitohet duke neglizhuar termin jolinear 3
3tu
tek problemi (3.6) – (3.7) – (3.8) -
(3.9) - (3.10). Një metodë e turbulencës dyfishe është përdorur në vazhdim për rastin
jolinear, por vetëm për tipe të veçanta kushtesh fillestare të problemit, konkretisht për
të ashtuquajtura kushtet monokromatike të formës:
and
Në përgjithësi metodat analitike të studimit në ekuacionet diferenciale paraqesin
vështirësi të shumta. Përveç se janë tepër të komplikuara, zgjidhjet analitike në
përgjithësi përdoren me vështirësi në praktikë. Zgjidhje numerike indirekte është
realizuar në [21] dhe [22] për problemin (3.1) – (3.2) – (3.3) – (3.4) – (3.5), duke e
transformuar fillimisht këtë problem diferencial të rendit të dytë, në një problem
diferencial ekuivalent të rendit të parë dhe duke aplikuar pastaj tek ky i fundit një
skemë diferencash të rendit të parë, që garanton natyrisht saktësi minimale.
Modeli (1-5) sigurisht është një model i thjeshtuar. Modelet reale në praktikë,
përveçse janë më të komplikuar, përmbajnë në përgjithësi një numër parametrash dhe
konstantesh fizike. Modele të tilla zakonisht simulohen dhe zgjidhen numerikisht një
numër të madh herësh. Për këtë arsye metodat numerike që përdoren lypset të jenë
efiçiente dhe ekonomike nga pikëpamja e kohës së llogaritjeve.
Në këtë paragraf të studimit ne do të paraqesim dhe implementojmë një metodë
efikase për zgjidhjen e problemit (3.1-3.5) dhe do të analizojmë çështje të tjera të
lidhura me këtë problem. Metoda numerike e propozuar është e tipit të
karakteristikave. Kjo e fundit është kombinuar me një teknikë të njohur si ekstrapolim
i Richardson-it. Do të shikojmë se efektiviteti dhe saktësia e metodës klasike të
karakteristikave përmirësohet esencialisht në metodën e propozuar. Konkretisht
tregohet se rendi konvencional (empirik) i gabimit lokal të metodës së propozuar
është të paktën një njësi më i lartë se ai i metodës klasike të karakteristikave. Për të
ruajtur nivelin global të saktësisë së metodës është bërë trajtim specifik i kushteve
(3.2) - (3.3).
Rezultatet e para të këtij studimi janë prezantuar në [34], që përbën përpjekjen
tonë të parë për të implementuar metodën e zakonshme të karakteristikave për
zgjidhjen e problemit. Por u provua më vonë se metoda e thjeshtë e karakteristikave
nuk jepte rezultate të pranueshme për shkak të rendit të saj të ulët të saktësisë dhe për
shkak të paqëndrueshmërisë së metodës në tentativën për të rritur saktësinë e saj duke

56
rafinuar hapin e integrimit në dimensionin hapësinor Ox. Zgjidhja e plotë e problemit
u realizua pas implementimit të metodës së re të propozuar dhe rezultatet numerike të
saj janë raportuar tek [6].
3.1.2. Zgjidhje numerike për problemin valor (3.1-3.5)
Sikurse dihet metoda e karakteristikave është e zbatueshme për ekuacionin e
përgjithshëm kuazilinear hiperbolik të formës:
, , (3.11)
me kushte kufitare-fillestare respektivisht
(3.12)-(3.13)
(3.14)
(3.15)
Koefiçientët më sipër janë funksione të çfarëdoshëm të ndryshoreve
,
: = ,
, i = 1, 2, 3, 4.
Mund të vihet re se ekuacioni diferencial (3.1) është një rast i veçantë i
ekuacionit (3.11), por kushti kufitar (3.3) është i ndryshëm nga kushti analog (3.13).
Kemi gjithashtu një ndryshim midis kushteve fillestare (3.5) dhe (3.15).
Supozojmë se P(x1, t1) dhe Q(x2, t2) janë dy pika çfarëdo në boshtin Ox, (pra
t1=t2=0), të tilla që 0 < x1, x2 < (pra P dhe Q nuk janë skaje të segmentit [0, ]).
Mund të verifikohet se drejtëzat dhe janë 4
kurbat karakteristike të ekuacionit (3.1) (Fig. 3.1). Procesi iterativ standard i metodës
klasike të karakteristikave, për gjetjen e pikëprerjes R të vijave karakteristike që
kalojnë nga pikat P dhe Q, i njohur simbolikisht si procesi (P, Q, R), këtu thjeshtohet
mjaft për faktin se pikëprerja R e vijave (drejtëzave) karakteristike që kalojnë nga P
dhe Q është evidente, ajo është qendra e katrorit me brinjë PQ. Ndërkaq përafrimet
për
në pikën R pas disa operacioneve algjebrike gjenden
me anën e ekuacioneve të mëposhtme:
(3.16)
(3.17)
, (3.18)
ku më sipër , dhe
.

57
Mund të vihet re se ekuacionet (3.16) dhe (3.18) janë eksplicitë, kurse ekuacioni
(3.17) është implicit për shkak të termit
. Mund të vihet
re akoma se ekuacionet (3.16) dhe (3.17) për gjetjen e përafrimeve për dhe
janë të pavarur dhe autonomë nga procesi (3.18) i gjetjes së përafrimit për
, sepse funksioni nuk figuron në mënyrë eksplicite në ekuacionet (3.16)
– (3.17).
Supozojmë tani që P(x1, t1), Q(x2, t2) dhe T(x3, t3) me , janë tri
pika të barazlarguara në boshtin Ox të tilla që . Nqs proceset
(P,Q,R), (Q,T,S), dhe (R,T,V) zbatohen në mënyrë të përsëritur sikurse tregohet në
Fig. 3.1, atëherë fitohen përafrimet
dhe .
Fig. 3.1: Proceset (P,Q,R), (Q,T,S) dhe (R,T,V)
Po i shënojmë këto përafrime me
dhe për të vënë në
dukje faktin që ato varen nga madhësia e hapit të përdorur . Shënojmë për analogji
përafrimet që fitohen nga procesi i vetëm (P,S,V) me hap si
dhe . Zbatojmë këtu teknikën e mëposhtme, të njohur si ekstrapolim i
Richardson-it: Nëqoftëse A( ) dhe A(2 ) janë dy përafrime të madhësisë A me rend
përafrimi O( 2) atëherë formula
(3.19)
jep një përafrim të A me gabim O( 4).
Por në konteksin e problemit që po zgjidhim, problemi i rendit të gabimit të dy
proceseve përafruese është i komplikuar për shkak se përafrimi A( ) në këtë kontekst
është një proces i trefishtë, kurse procesi i fundit (R,S,V), është i varur nga dy të parët
(P,Q,R) dhe (Q,T,S). Është gjithashtu e vështirë të gjykohet për rendin e gabimit të
procesit të vetëm (P,Q,R). Sikurse dihet, në këto raste mund të bëhen vlerësime
empirike, ose siç quhen ndryshe konvencionale, të rendeve të gabimeve që
përmendëm më sipër me anën e eksperimenteve numerike me probleme me zgjidhje

58
analitike të njohur. Ne kemi eksperimentuar për këtë qëllim disa shembuj, ndërmjet
tyre shembullin e mëposhtëm:
Zgjidhja ekzakte:
Në bazë të eksperimenteve të kryera kemi konkluduar që procesi i trefishtë
P,Q,R), (Q,S,T), (R,T,V) ka po thuaj të njëjtin rend konvencional si dhe procesi i
vetëm (P,S,V) - një rezultat ky i pritshëm. Ndërkaq në të gjitha eksperimentet e kryera
formula (3.19) prodhoi përafrime me rend të gabimit të paktën një njësi më të lartë se
secili nga dy proceset e përmendura më sipër.
Formula (3.19) është përdorur siç u përshkrua më sipër, për të gjetur përafrime
të reja për
dhe . Është e pritshme që në raport me metodën klasike
të karakteristikave saktësia globale e metodës së propozuar të përmirësohet cilësisht.
Shënojmë me (P,Q,S,V) procesin e përshkruar më sipër për gjetjen e nyjes
dhe të përafrimeve për
dhe . Shënojmë me G rrjetin e nyjeve që
fitohet nga coptimi i intervalit 0 ≤ x ≤ π në m nënintervale me gjatësi = π/m.
Supozojmë që ) ekziston dhe që për . Rrjedhimisht
dhe
janë funksione të njohura për dhe t = 0.
Ndërkaq nga kushtet (1-5) mund të shkruajmë:
(3.20)
π π π π
(3.21)
Shënimi G0 do të përdoret në vazhdim për të shënuar (m+1) nyjet e rrjetës G.
Aplikojmë procesin (P,Q,S,V) për çdo 3 nyje të njëpasnjëshme të rrjetës G0 dhe në
këtë mënyrë fitohen (m-1) nyje në të cilat funksioni dhe derivatet e pjesshme të tij
janë llogaritur. Shënojmë me G1 rrjetin që fitohet nga këto (m-1) nyje dhe dy nyjet
skajore A dhe Z (Fig. 3.2).

59
Fig. 3.2: Kurbat karakteristike të ekuacionit (3.1) dhe rrjetat nyjore G0 dhe G1
Do të tregojmë tani se si vlerat e dhe
do të përafrohen
në nyjet A dhe Z. Nga kushti kufitar (3.2) vihet re se dhe Një
proces interpolimi mund të përdoret për të vlerësuar me saktësi të mjaftueshme
duke përdorur vlerat e në anën e majtë të Z. Në implementimin e metodës që kemi
bërë më poshtë kemi kryer interpolim polinomial të rendit të dytë dhe kemi
shfrytëzuar për këtë qëllim utilitetet matlab polyfit dhe polyval. Zgjedhja e gradës 2
është motivuar nga kërkesa për të ruajtur rendin e saktësisë së siguruar për nyjet e
brendshme të rrjetës G1. Strategji të tjera interpolimi, si p.sh. interpolimi Hermitian,
mund të jenë më efektive. Derivati është vlerësuar me anën e formulës 3-
hapëshe të diferencave nga para, ndërkaq formula analoge e diferencave nga pas është
përdorur për të vlerësuar derivatin . Zgjedhja e këtyre formulave, ashtu si edhe
zgjedhja e gradës dy të polinomit interpolues më sipër, është motivuar nga kërkesa për
të patur po atë saktësi për derivatin në pikën Z që u arrit për në këtë pikë. Së fundi
mund të llogaritet me anën e kushtit të djathtë kufitar (3.3).
Mund të vihet re se bazuar në rrjetën G1, një rrjetë G2 mund të ndërtohet në të
njëjtën mënyrë dhe pastaj një rrjetë G3 e kështu me rradhë duke përparuar në drejtim
të boshtit Ot. Në këtë mënyrë është ndërtuar një rrjetë uniforme dhe katrore nyjesh në
të cilin funksioni dhe derivatet e tij të pjesshme janë përafruar.
Metoda e përshkruar më sipër është implementuar në Matlab. Kodi kryesor i
ndërtuar si skedar funksion me emrin fmain.m është paraqitur në shtojcën Sh4 të këtij
punimi. Për zgjidhjen e ekuacionit implicit (3.17) është përdorur utiliteti Matlab fzero.
3.1.3 Rezultate numerike
Në një seri eksperimentesh numerike problemi (3.1-3.5) është zgjidhur për vlera të
ndryshme të parametrit shuarës α dhe për kushte të ndryshme fillestare për të cilat
trajtimet analitike kanë qënë të pamundura tek [22]. Rezultatet më tipike janë
paraqitur grafikisht në figurat 3.3-3.6 dhe mund të krahasohen me ato të [22]. Nga
rezultatet vihet re se për vlera të parametrit shuarës α më të mëdha ose baraz me π/2

60
në të gjitha rastet e shqyrtuara zgjidhjet e ekuacionit (lëkundjet) shkojnë në zero kur t
shkon në infinit. Për zgjidhjet janë të kufizuara dhe sistemi valor është
lëkundës. Pra parametri shuarës α mund të përdoret efektivisht për të amortizuar
amplitudat e lëkundjeve.
Metoda numerike e propozuar është e qëndrueshme dhe efiçienca e saktësia e
saj demonstrohet në të gjitha eksperimentet numerike të kryera. Është verifikuar se
problemi (3.1-3.5) është i zgjidhshëm numerikisht me kosto llogaritëse të arsyeshme
për intervale të kohës t mjaft më të mëdhenj se ato që pasqyrohen në figurat (3.3-3.6).
Koha kompjuterike për çdo ekzekutim të kodit fmain.m ka qënë rreth 10 sekonda,
kështu që metoda mund të përdoret efektivisht në rastet kur problemi (3.1-3.5) duhet
të simulohet dhe zgjidhet një numër të madh herësh.
3.1.4 Shtrirja e rezultateve dhe disa përfundime
Metoda numerike e paraqitur në këtë paragraf dhe implementuar në Matlab përbën një
mekanizëm efiçient për të analizuar fenomenin e lëkundjeve (galopin) me amplitudë
të lartë që ndodh në linjat e tensionit të lartë. Lëkundja e padëshiruar mund të shuhet
duke instaluar një sistem dashpot të përshtatshëm në njërin skaj të linjës. Metoda e
paraqitur mund të përdoret për të analizuar modelet e ngjashme që janë përshkruar në
literaturë. Zgjidhjet numerike janë të mundura për çfarëdo lloj kushtesh fillestare të
problemit. Puna e kryer mund të zgjerohet dhe të zbatohet në praktikë sa herë që një
sistem dashpot duhet të instalohet në njërin apo në të dy skajet e linjës.
Mund të vihet re se metoda e propozuar mund të shtrihet për të zgjidhur
problemin e mëposhtëm që perbën një përgjithësim të problemit (1-5):
Të gjendet funksioni u(x, t) që kënaq ekuacionin
,
me kushte kufitare
≥ ,
≥ ,
dhe kushte fillestare ,
ku , dhe janë funksione të çfarëdoshëm dhe është konstante e çfarëdoshme.
Kodi Matlab fmain.m mund të përshtatet pa vështirësi për problemin e mësipërm.

61
(a) α=π/4
(a) α=π/4
(b) α=π/2
(b) α=π/2
(c) α=3π/2
(c) α=3π/2
Fig. 3.3: Zhvendosja u përkundrejt x dhe t për
φ(x)=0.1sin(0.5x), ψ(x)=0.05sin(0.5x)
dhe ϵ=0.1.
Fig. 3.4: Zhvendosja u përkundrejt x dhe t për
φ(x)=2.5sin(3.5x), ψ(x)=0.05sin(3.5x) dhe ϵ=0.1.

62
(a) α=π/4
(a) α=π/4
(b) α=π/2
(b) α=π/2
(c) α=3π/2
(c) α=3π/2
Fig. 3.5: Zhvendosja u përkundrejt x dhe t për
φ(x)=0.01x3e
-3x/π, ψ(x)=0.2x(π-x) dhe ϵ=0.1.
Fig. 3.6: Zhvendosja u përkundrejt x dhe t për
φ(x)=x+sin(x), ψ(x)= x(π-x) dhe ϵ=0.1.

63
3.2 Zgjidhje numerike për ekuacionin e përgjithshëm Burgers-Korteweg-de
Vries.
3.2.1 Hyrje
Një sërë problemesh fizike mund të përshkruhen me anën e ekuacionit Korteweg-de
Vries (KdV). P.sh. trajektorja (dinamika) që përshkruan pika më kulmore (në lartësi)
e një vale ujërash në ambiente të cekëta (e quajtur soliton) është zgjidhje e ekuacionit
Kdv. Është i njohur fakti se për të studjuar dinamikën valore të këtyre ujërave është i
mjaftueshëm studimi i solitoneve. Valët solitare janë zgjidhje (një familje 1
parametrike vijash) të ekuacionit KdV - [37]. Për analogji dinamika e gazeve jonike
(të quajtur plasmas) përshkruhet me anën e ekuacionit KdV. Fenomene edhe më të
komplikuara si përhapja e valëve në tubot elastike ku rrjedh fluid viskoz [43], studimi
i sistemit kardiovaskular në mjekësi, etj., janë vetëm disa nga shembujt dhe modelet e
shumta në të cilat ekuacionet që përshkruajnë dinamikat përkatëse janë ose
reduktohen pas thjeshtimesh të ndryshme në të ashtëquajturin ekuacion Burgers-
Korteweg-de Vries (B-KdV):
(3.22)
Ekuacioni B-KdV është një kombinim i ekuacionit Burgers me ekuacionin
KdV. Ai shfaqet në shumë kontekste fizike si një problem i përhapjes dhe
karakterizohet nga 3 terma (faktorë): jo-lineariteti , shpërhapja , dhe
shpërbërja . Konsideratat fizike kërkojnë që parametri shpërhapës b duhet të jetë
gjithmonë pozitiv, ndërsa parametri shpërbërës c mund të jetë pozitiv ose negativ.
Literatura matematike për studimin e ekuacionit B-KdV është mjaft e gjerë. (shiko
p.sh. [39] , [40], [41]). Vitet e fundit ka pasur një interes më të madh në zgjidhjet
numerike të ekuacionit B-KdV. Disa metoda të mirënjohura, si diferencat e fundme,
skemat e elementëve të fundëm, metodat spektrale Furie dhe metodat e diferencave të
fundme eksponenciale janë përdorur për të zgjidhur problemet me bazë ekuacionin
Burgers apo ekuacionin KdV. Megjithatë literatura matematike për trajtimin numerik
të ekuacionit B-KdV është e pakët. Një nga studimet e para numerike të ekuacionit B-
KdV është kryer nga Conosa dhe Gazdag [38]. Darvishi dhe të tjerët në [42] kanë
përdorur metodën e bashkëvendosjes spektrale për zgjidhjen numerike të ekuacionit
B-KdV. Tek [5], si dhe në këtë studim trajtohet zgjidhja numerike e ekuacionit B-
KdV duke përdorur skemat Runge-Kutta diferenciale eksponenciale dhe metodën e
përafrimeve spektrale. Në paragrafin që pason paraqitet në mënyrë skematike metoda

64
Runge-Kutta e diferencave eksponenciale e rendit të katërt (ETDRK4). Argumentohet
përzgjedhja e kësaj metode në veçanti dhe përfshirja në përgjithësi në këtë studim e
skemave Runge-Kutta të diferencave eksponenciale (ETDRK). Problemi i
qëndrueshmërisë përbën një çështje të rëndësishme dhe të pashmangshme për çdo
skemë numerike, në veçanti ai paraqitet i mprehtë për problemin diferencial stiff që
zgjidhet. Në paragrafin 3.2.3. studjohet qëndrueshmëria e metodave të ndryshme
diferenciale eksponenciale (ETD) dhe (ETDRK) e në veçanti qëndrueshmëria e
ETDRK4 dhe ETDRK3. Implementimi i dy metodave të fundit dhe rezultatet
numerike të tyre në zgjidhjen e B-KdV paraqiten në paragrafin 3.2.4. Efikasiteti dhe
saktësia e skemave numerike të propozuara demonstrohet nëpërmjet shembullit
numerik.
3.2.2 Skema eksponenciale diferenciale Runge-Kutta e rendit të katërt
Shumë probleme fizike përshkruhen nga ekuacioni i përgjithshëm me derivate të
pjesshme
, (3.23)
ku L është një operator linear eliptik dhe N është një operator jo linear. Në shumicën e
rasteve në praktikë tek (3.23) injorohet influenca e kushteve kufitare dhe në vend të
tyre supozohen kushte kufitare periodike. Zbatimi i metodës spektrale Furie e
transformon problemin diferencial (3.23) me kushte kufitare periodike, në një sistem
stiff ekuacionesh diferenciale të zakonshme të ndryshores kohore t.
(3.24)
Qënia stiff e një sistemi diferencial është një cilësi specifike e tij që paracakton
dështimin në përgjithësi të procedurave numerike eksplicite për integrimin e sistemit
në mënyrë efikase. Metoda integruese ETD rezulton një nga metodat e suksesshme
për zgjidhjen e problemeve stiff gjysëm lineare ([35]). Termi linear tek (3.24)
përfaqëson pjesën stiff më dinamike të problemit, ndërkaq termi jo linear ndryshon
më ngadalë se ai linear. Një metodë ETD integron saktësisht termin linear ndërkaq
përafron termin tjetër duke përdorur mekanizmin e përafrimeve polinomiale.
Duke shumëzuar (3.24) me faktorin dhe duke integruar me një hap me
gjatësi l, përftohet:
. (3.25)

65
Shënojmë me përafrimin numerik të Skema diferenciale
eksponenciale e rendit të parë (ETD1) jepet nga ekuacioni:
. (3.26)
Një nga mënyrat për të nxjerrë skema ETD të rendeve më të larta se 1 është
përafrimi polinomial i që figuron nën integralin (3.25). Cox dhe
Mathews tek [35] japin skemat ETD duke përdorur skemat Runge-Kutta, të shënuara
si ETDRK. Në veçanti skema ETDRK4 është e një rendësie të veçantë. Kjo skemë e
zbatuar për problemin prototip (3.23) mund të shkruhet në formën:
Eksperienca në zgjidhjen e problemeve nëpërmjet ETDRK tregon që zbatimi i
kësaj metode drejpërdrejt sipas formatit (3.27) manifeston paqëndrueshmëri dhe
efektin numerik negativ të njohur si fenomen i diferencës zero. Për arsyen e
mësipërme, Kassam dhe Trefethen tek [36] eksplorojnë paqëndrueshmërinë numerike
të skemave ETD në përgjithësi dhe propozojnë një modifikim të tyre në zbatimet
konkrete numerike me qëllim zbutjen e efekteve negative. Më poshtë do të tregohet
konkretisht efiçienca numerike e ETDRK4 dhe ETDRK3.
3.2.3 Studimi i zonave të qëndrueshmërisë
Në këtë paragraf do të analizohen cilësitë e qëndrueshmërisë së metodave ETD dhe
ETDRK deri tek rendi i katërt duke u bazuar në metodikën e përshkruar tek [35]. Në
terma të përgjithshme qëndrueshmëria nënkupton përhapjen (transmetimin) pa
zmadhim të gabimeve lokale të kryera në çdo hap të procesit llogaritës në hapat
pasardhës. Zona e qëndrueshmërisë së një metode numerike është pjesa e planit
kompleks që formohet nga produktet ∈ për të cilat integrimi numerik i
ekuacionit skalar referent , me hap , prodhon zgjidhje të kufizuar. Le të
analizojmë zonat e qëndrueshmërisë së ETDRK4.

66
Konsiderojmë EDZ jo linear:
(3.28)
me pjesën jo lineare f(u). Shënojmë me pikën fikse për të cilën
. Duke linearizuar pjesën jo lineare f(u) rreth kësaj pike dhe
duke shënuar q = , marrim rezultatin si më poshtë:
. (3.29)
Pika fikse është pikë qëndrueshmërie nqs Re(p+q) < 0. Më poshtë
diskutohen zonat e qëndrueshmërisë për skemat ETDR4 dhe RK4 përkundrejt ETD1,
ETD2, ETDRK2 dhe ETDRK3, në planin kompleks të x = qt për vlera të ndryshme të
y = pt. Në përgjithësi parametrat p dhe q mund të jenë të dyja me vlera komplekse,
kështu që zona e qëndrueshmërisë rezulton të jetë katër dimensionale. Duke supozuar
që q është komplekse dhe p është fikse, reale dhe negative, ne mund të paraqesim
grafikisht zonat e qëndrueshmërisë në planin kompleks. Në Fig.3.7 janë paraqitur,
zona e qëndrueshmërisë e metodës klasike Runge-Kutta (RK4) dhe ato të ETDRK4
për disa vlera negative të ndryshme të y. Këto të fundit janë përzgjedhur në mënyrë të
përshtatshme për një paraqitje grafike sa më të mirë. Siç mund të vihet re nga
Fig.3.7.(a), zona e qëndrueshmërisë për skemën ETDRK4 zmadhohet kur y
zvogëlohet. Ndërkohë, kurba e kuqe e brendshme në Fig. 3.7.(b) - që është zona e
qëndrueshmërisë së RK4 - i korrespondon rastit kur y = 0 për ETDRK4. Rezultati
mund të përgjithësohet: Zonat e qëndrueshmërisë së skemave ETDRK për y = 0
përkojnë me ato të skemave RK të rendit përkatës. Rezultati i mësipërm ishte i
pritshëm meqënëse skemat ETDRK reduktohen në skema eksplicite RK të rendit
përkatës kur . Sigurisht zonat e paraqitura në Fig.3.7 janë vetëm një tregues i
qëndrueshmërisë së metodave.
Nëse vlera e vet e operatorit linear është imagjinare, atëherë zonat e
qëndrueshmërisë rezultojnë me krejt tjetër pamje. Në Fig. 3.8 janë paraqitur zonat e
qëndrueshmërisë të ETDRK2, ETDRK3 dhe ETDRK4, për y = -18i dhe y = 18i.
Mund të vihet re nga kjo figurë që zonat e qëndrueshmërisë përfshijnë një interval të
boshteve imagjinare deri pikërisht në vlerën (- Imag(y)). Nga eksperimentet që kemi
kryer na rezulton që përfundimi i mësipërm qëndron për çdo vlerë imagjinare y.
Zonat e qëndrueshmërisë të ETDRK2, ETDRK3 dhe ETDRK4, për y = -4 dhe y
= -9 jepen në Fig.3.8. Nga kjo figurë mund të vërehet që për të dy vlerat e zgjedhura

67
për y, zona e qëndrueshmërisë rritet me rritjen e rendit të skemës ETDRK, që do të
thotë, që skema ETDRK2 ka zonën e qëndrueshmërisë më të vogël, ndërsa skema
ETDRK4 ka zonën e qëndrueshmërisë më të madhe. Nga eksperimentet e tjera ka
rezultuar që përfundimi qëndron për çdo vlerë negative të y.
Zonat e qëndrueshmërisë të ETDRK2, ETDRK3, ETDRK4, ETD1 dhe ETD2
janë krahasuar në Fig.3.10 për vlerat e y = -9 dhe y = -15. Mund të vërehet nga kjo
figurë që, për të dy vlerat e y zona e qëndrueshmërisë e skemës ETDRK4 përmban ato
të skemave ETDRK3 dhe ETDRK2, ndërkohë që ajo vetë përmbahet nga zona
përkatëse e skemës ETD2. Një pjesë e vogël e zonës së qëndrueshmërisë së skemës
ETDRK4 nuk përmbahet nga ajo e skemës ETD1, por sidoqoftë zona e parë e
përmendur më sipër është në mënyrë të konsiderueshme më e vogël se kjo e fundit.
Ndërkohë, të gjitha zonat e qëndrueshmërisë për y = -9 janë në mënyrë të
konsiderueshme më të vogla, dhe të përfshira në ato korrespondueset për y = -15. Nga
eksperimentet dhe vëzhgime të tjera të bëra është arritur në përfundimin se rezultatet e
mësipërme qëndrojnë ndërkohë që .
Është fakt i njohur se zona e qëndrueshmërisë së metodave numerike klasike
eksplicite (me një hap apo me shumë hapa) zvogëlohet me rritjen e rendit të tyre.
Kështu, kërkesa e rritjes së cilësisë së qëndrueshmërisë së këtyre metodave bie ndesh
me kërkesën e rritjes së saktësisë së tyre. Megjithëse për metodën me m+1 hapa rendi
2m+3 është i arritshëm, kërkesa e qëndrueshmërisë vendos një kufizim të ashpër mbi
rendin sipas teoremës Dahlquist [47]: Kufiri maksimal i rendit të një metode të
qëndrueshme është m+1 n.q.s. m është tek dhe m+2 n.q.s. m është çift.
Nga eksperimentet dhe vëzhgimet e bëra në këtë paragraf arrihet në
përfundimin që ndryshe nga rasti klasik i metodave eksplicite me një ose me shumë
hapa, qëndrueshmëria e skemave ETDRK përmirsohet kur rendi i tyre rritet. Në vend
të kërkimit të një ekuilibri midis qëndrueshmërisë së një metode dhe rendit të
saktësisë së kërkuar prej saj, sipas teoremës Dahlquist, i vetmi problem që haset në
zbatimin e skemave ETDRK është se kostoja llogaritëse e tyre rritet në mënyrë
progresive me rendin e tyre. Por, sa me i lartë rendi i ETDRK që përdoret, aq më i
madh mund të zgjidhet hapi i integrimit (pa rrezikuar qëndrueshmërinë e skemës).
Kështu, kompromisi ndërmjet madhësisë së hapit të integrimit dhe rendit të skemës
ETDRK të përdorur përbën faktorin kyç për të optimizuar ngarkesën llogaritëse dhe
shpejtësinë e metodës.

68
Eksperimente numerike për zgjidhjen e ekuacionit B-KdV me metodën
ETDRK2, ETDRK3 dhe ETDRK4, të bëra në paragrafin që pason, janë bazuar në
analizën dhe përfundimet e mësipërme.
Kemi ndërtuar dhe disponojmë kodet matlabike për ndërtimin e zonave të
qëndrueshmërisë që paraqiten në figurat 3.7, 3.8, 3.9 dhe 3.10 më poshtë.
(a) (b)
Fig 3.7: Zonat e qëndrueshmërisë për skemat RK4 dhe ETDRK4 në planin kompleks të
për disa vlera negative të ndryshme .
(a) (b)
Fig 3.8: Kufijtë e zonave të qëndrueshmërisë për: ETDRK2, ETDRK3, ETDRK4
(a) y = -18i, (b) y = 18i.

69
(a) (b)
Fig 3.9: Zonat e qëndrueshmërisë : ETDRK2, ETDRK3, ETDRK4: (a)y = -4 (b) y = -9
(a) (b)
Fig 3.10: Zonat e qëndrueshmërisë: ETDRK2 , ETDRK3, ETDRK4, ETD1, ETD2 (a) y = -9
(b) y = -15
3.2.4 Eksperimente numerike
Konsiderojmë tani ekuacionin B-KdV në , për t > 0 dhe e rishkruajmë atë si
. (3.30)
Problemi Cauchy për ekuacionin (3.30) është studjuar nga Bona dhe Schonbek
[45]. Ata provuan ekzistencën dhe unicitetin e zgjidhjes së problemit. Ekuacioni
(3.30) mund të shkruhet në formë më kompakte si më poshtë:
. (3.31)
Prania e derivatit të dytë dhe të tretë në ekuacion (shpërhapja dhe
shpërbërja ) bën që zgjidhja e tij të sillet në mënyrë komplekse.

70
Ekuacionin B-KdV (3.31) me kushtet kufitare periodike 2L mund të shkruhet në
hapësirën Furie si vijon:
,
ku F simbolizon transformimin spektral Furie. Për eksperimentet numerike në
shembullin më poshtë zgjidhja është llogaritur në një rrjet me nyjesh në
segmentin me kushte kufitare periodike. Kodi Matlab ode 15s, i konsideruar
si më i miri i familjes Matlabike përsa i përket saktësisë së siguruar në zgjidhjen e
problemeve stiff, është përdorur për të prodhuar zgjidhjet referente. Fiksojmë vlerat e
konstanteve: a=1, b=1.5 , c=3 dhe konsiderojmë kushtin fillestar si më poshtë për B-
KdV (3.31):
. (3.32)
Duke ju referuar [46], zgjidhja eksplicite për B-KdV (3.31)-(3.32) është
.
Për të krijuar një përfytyrim të zgjidhjes së problemit (3.31) - (3.32) në figurën
3.11 paraqitet vala solitare që përparon nga e djathta në të majtë, kurse në figurën 3.12
paraqitet profili fillestar valor (t = 0) dhe profili fqinjë (t = 1.2).
Fig 3.11: Vala solitare për x nga -π deri në π dhe t nga 0 deri në t = 20.

71
Fig 3.12: Evolucioni kohor i profileve të zgjidhjes së (3.31) - (3.32)
Në figurën 3.13 më poshtë janë paraqitur në funksion të hapit kohor h gabimet
lokale dhe ato globale në zgjidhjen e (3.31) - (3.32) me skemat ETDRK2, ETDRK3
dhe ETDRK4. Nga të dy pjesët e kësaj figure vihet re se për , për të njëjtin
nivel saktësie, ETDRK4 mund të përdorë një hap më të madh se sa ETDRK3,
ndërkohë që ETDRK2 dështon në zgjidhjen e problemit për spektrin e h të përdorur
në eksperiment. Ndryshimet midis ETDRK3 dhe ETDRK2 thellohen kur h
zvogëlohet.
Në figurën 3.14 më poshtë është paraqitur saktësia përkundrejt kohës së
zgjidhjes të B-KdV (3.31) - (3.32) me skemat ETDRK3 dhe ETDRK4. Nga kjo figurë
vihet re një varësi lineare e qëndrueshme midis gabimit të ETDRK4 dhe hapit h
korrespondues. E njëjta varësi është më pak e qëndrueshme në rastin e ETDRK3.
Grafiku përshkruan qartë diferencën e kostove llogaritëse midis dy metodave.

72
Fig 3.13: Saktësia përkundrejt hapit të kohës h për zgjidhjen e B-KdV (3.31) - (3.32) me
skemat ETDRK2, ETDRK3 dhe ETDRK4. Zgjidhja referente e realizuar nga ode 15s
Fig 3.14: Saktësia përkundrejt kohës së harxhuar për zgjidhjen e (3.31) - (3.32) me anën e
ETDRK3 dhe ETDRK4. Zgjidhja referente e realizuar me ode 15s

73
Në Fig 3.15 bëhet krahasimi i profilit ekzakt të zgjidhjes së B-KdV (3.31) -
(3.32) për t =10-3
me profilin e llogaritur në këtë pikë me anën e ETDRK4, për
h = 10-4
.
Fig 3.15: Krahasimi midis zgjidhjes ekzakte të B-KdV (3.31) - (3.32) dhe një zgjidhje me
ETDRK4, h=10-4
, llogaritur në t=10-3
Kodi matlab BKDV.m që kemi ndërtuar për llogaritjen e zgjidhjes numerike dhe
për realizimin e figurave 3.11, 3.12 dhe 3.15 më sipër ndodhet në shtojcën Sh5 të
punimit. Figurat 3.13 dhe 3.14 i kemi realizuar me ndihmën e pakos Matlab [48].
Këtu duhet të përmendim se të gjitha teknikat klasike eksplicite për sistemet
stiff, shumëhapëshe ose Runge-Kutta, e kanë rendin maksimal 2. Më sipër u pa qartë
se problemi stiff i gjeneruar prej ekuacionit B-KdV zgjidhet në mënyrë komode prej
metodave eksplicite me rend 3 dhe 4, respektivisht ETDRK3 ose ETDRK4. Duke j'u
referuar saktësisë në procesin e zgjidhjes, mund të konludojmë se skema ETDRK4
është qartësisht më e favorshme se ETDRK3.

74
PËRFUNDIME DHE REKOMANDIME
1) Probleme të shumta në ekuacionet diferenciale të zakonshme si problemi i vlerës
fillestare, problemet e vlerës kufitare, gjetja e zgjidhjeve periodike, problemet e
vlerave të veta etj. modelojnë procese të ndryshme në shkencat natyrore dhe ato
teknike. Metodat numerike përbëjnë një aparat matematik të suksesshëm e operativ
për zgjidhjen e problemeve diferenciale dhe zgjidhjen e problemeve të ndryshme
inxhinierike e teknike që modelohen prej tyre.
2) Ekuacionet dhe sistemet diferenciale me zgjidhje lëkundëse paraqesin probleme
dhe vështirësi gjatë integrimit numerik të tyre, të ngjashme me ekuacionet stiff në
pikëpamje të kohës së integrimit. Ndërkaq, paraqitet më i mprehtë problemi i
saktësisë së zgjidhjes së tyre. Problemet e vlerës fillestare që gjenerohen nga zbatimi i
metodës së goditjes shpesh paraqiten të paqëndrueshëm numerikisht. Disa
rekomandime janë dhënë në punim për trajtimin e rasteve të tilla.
3) Dy nga metodat bazë për zgjidhjen e problemit kufitar në EDZ, metoda e goditjes
dhe ajo e diferencave të fundme demonstrojnë të njëjtën saktësi në probleme të
ndryshme. Përdorimi i problemit të përgjithshëm Euler-Koshi si një model test për të
krahasuar dy metodat duket i suksesshëm. Metoda e goditjes paraqitet më operative
dhe më elastike në implementim se ajo e diferencave të fundme. Por kjo e fundit
rezulton më e qëndrueshme numerikisht se metoda e goditjes. Problemet e vlerës
fillestare të gjeneruara prej kësaj metode duke qënë në thelb të zhveshur nga kuptimi
dhe përmbajtja fizike, në shumë raste janë të paqëndrueshëm numerikisht. Ndërkaq
metoda numerike bazë e elementeve të fundëm është e avantazhuar në raport me dy
metodat e sipërpërmendura përsa i përket saktësisë. Por zbatimi dhe implementimi i
saj si në versionin Galerkin ashtu dhe në atë Rayleigh-Ritz janë mjaft më kompleks.
4) Metoda numerike e propozuar dhe implementuar në Matlab në paragrafin 3.1, si
një kombinim i metodës së karakteristikave dhe ekstrapolimit Richardson, përbën një
mekanizëm efiçient për të analizuar fenomenin e lëkundjeve (galopin) me amplitudë
të lartë që ndodh në linjat e tensionit të lartë. Metoda është e qëndrueshme
numerikisht dhe saktësia lokale konvencionale e saj u vlerësua të jetë të paktën një
njësi më e madhe se saktësia e metodës klasike të karakteristikave. Lëkundja e
padëshiruar mund të shuhet duke instaluar një sistem dashpot të përshtatshën në njërin
skaj të linjës. Metoda e paraqitur mund të përdoret për të analizuar modelet e

75
ngjashme që janë përshkruar në literaturë. Zgjidhjet numerike janë të mundura për
çfarëdo lloj kushtesh fillestare të problemit. Puna e kryer mund të zgjerohet dhe të
zbatohet në praktikë sa herë që një sistem dashpot duhet të instalohet në njërin apo në
të dy skajet e linjës.
5) Zbatime të shumta inxhinierike dhe industriale janë të lidhura me ekuacionin e
përgjithshëm Burgers-Korteweg-de Vries. Zgjidhja e këtij ekuacioni me metodën
spektrale e redukton problemin diferencial fillestar në një sistem ekuacionesh
diferenciale të zakonshme tepër stiff. Skemat diferenciale eksponenciale të tipit
Runge-Kutta (ETDRK) rezultojnë të jenë një nga mënyrat efektive për zgjidhjen
numerike të sistemeve stiff të gjeneruar prej metodës spektrale. Qëndrueshmëria
numerike dhe rendi i saktësisë së tyre i bën skemat ETDRK të rendeve 3 dhe 4
metoda numerike efiçiente. Nga eksperimentet numerike të kryera ETDRK4 rezulton
veçanërisht efektive në pikëpamje të saktësisë dhe shpejtësisë së llogaritjeve.

76
Bibliografia
[1] U.M. Ascher and L. P. Petzold. Computer methods for Ordinary Differential
Equations and Differential-Algebraic Equations. SIAM, 1998.
[2] David Eberly. Stability Analysis for Systems of Differential Equations. Geometric
Tools, LLC http://www.geometrictools.com/ Copyright c 1998-2015.
[3] W.H.EnrightandLiYan,2009. The Reliability/Cost Trade-off for a Class of ODE
solvers (pdf).
[4] R.M.M. Mattheij U.M. Ascher and R.D. Russell. Numerical Solution of Boundary
Value Problems for Ordinary Differential Equations. Classics in Applied
Mathematics Series, Society for Industrial and Applied Mathematics, Philadelphia,
1995.
[5] B.Huti, F. Osmani, "Numerical solution for the generalized Burgers-Korteweg-de
Vries equation", Journal of Multidisciplinary Engineering Science and Technology
(JMEST) ISSN: 2458-9403 Vol. 3 Issue 3, March – 2016.
[6] B.Huti, L. Hanelli, "Numerical Solution for a Wave Equation Arising in
Oscillations of Overhead Transmission Lines", International Journal of Innovation
in Science and Mathematics, Volume 4, Issue 2, April – 2016, ISSN (Online):
2347–9051, http://ijism.org/index.php/issues.
[7] R.L. Burden, J.D. Reynold, Numerical Analysis, Weber @ Schmidt,
Massachusetts, USA, (1981; 598 faqe).
[8] Laurence V. Fauset: Applied Numerical Analysis, Prentice Hall 1999, page 478.
[9] Liu, Y- Solutions of Sturm-Liouville boundary value problems for higher-order
differential equations, J. of Applied Mathematics and Computing 24, (2007), 231
– 243.
[10] R.A. Usmani, M. Isa, "Numerical methods for approximating eigenvalues of
boundary-value problems", Internat. J. Math. math. Sci. 9 (1986) 567-575.
[11] E.H. Twizell, S.A. Matar, "Numerical methods for computing the eigenvalues of
linear forth-order boundary-value problems", Journal of Computational and
Applied mathematics 40 (1992) 115-125.
[12] Ballarini, Roberto (April 18, 2003). "The Da Vinci-Euler-Bernoulli Beam
Theory", Mechanical Engineering Magazine Online. Retrieved 2006-07-22.

77
[13] Liu, Y. & Ge,W. - "Solvability of two-point BVPs for fourth-order differential
equations at resonance", Zeitschrift fur Analysis und Ihre Anwendungen 22(2003),
977-989.
[14] L. Hanelli, F. Osmani, "Numerical Solution for some special eigenvalue problems
arising in thermal instability", International Journal of Computational and
Numerical Analysis and Applications, Academic Publications, Vol.2, No. 4, 2002,
faqe 457-476
[15] E. Gisela, F. Uhlig, Numerical Algorithms with C, Springer - Verlag Berlin
Heidelberg New Jork, 1996.
[16] B. Huti, L. Hanelli, "Disa raste tipike problematike të integrimit numerik në
ekuacionet diferenciale", Buletini Shkencor (uniel), Universiteti “A.Xhuvani”
Elbasan, miratuar për botim Mars 2016.
[17] B. Huti, L. Hanelli, "The study of the influence of multiplying parameter in the
numerical methods of shooting type", The 3rd International Conference on
"Research and Education - Challenges towards the Future", ICRAE 2015, Shkodra,
23-24 October 2015.
[18] R.A. Usmani, "Finite difference methods for computing eigenvalues of fourth-
orderboundary-value problems", Internat. J. Math. math. Sci. 9 (1986) 137-143.
[19] J. N. Reddy, (2007), Nonlinear finite element analysis, Oxford University Press.
[20] B.Huti, F.Osmani: “Analizë krahasuese e teknikave bazë për zgjidhjen e problemit
kufitar”, Mbajtur në Konferencën Kombëtare “Studime të Avancuara Ne
Inxhinierine Matematike, Fizike dhe Kimike”, dt. 28.10.2011.
[21] M.Kullolli, F.Osmani: “Zgjidhje numerike për një problem linear të dobët që
modelon lëkundjet në linjat elektrike”, “Buletini i Shkencave Teknike”,
miratuar për botim në dt. 20 Mars 2005, 10 faqe.
[22] Darmawijoyo, W. T. van Horssen, and Ph. Clement, "On a Rayleigh wave
equation with boundary damping," in Nonlinear Dynamics, 33, 2003, pp. 399-429.
[23] Darmawijoyo, and W.T. van Horssen, "On a characteristic layer problem for a
weakly damped string," in Nonlinear Analysis and Applications, Kluwer
Academic Publishers, Dordrecht, 2003 (34 pages).
[24] Darmawijoyo, and W. T. van Horssen, "On the weakly damped vibrations of a
string attached to a spring-mass-dashpot system," in Journal of Vibration and
Control, 9, 2003, pp. 1231-1248.

78
[25] W. T. Van Horssen, "An asymptotic theory for a class of initial – boundary value
problems for weakly nonlinear wave equations with an application to a model of
the galloping oscillations of overhead transmission lines," in Siam Journal on
Applied Mathematics 48, 1988, pp. 1227-1243.
[26] M. S. Krol, "On a Galerkin – Averaging method for weakly nonlinear wave
equations," in Mathematical Methods in the Applied Sciences 11, 1989, pp. 649-
664
[27] G. J. Boertjens, and W. T.van Horssen, "On mode interactions for a weakly
nonlinear beam equation," in Nonlinear Dynamics 17, 1998, pp. 23-40.
[28] G. J. Boertjens, and W. T. van Horssen, "An asymptotic theory for a weakly
nonlinear beam equation with a quadratic perturbation," in Siam Journal on
Applied Mathematics 60, 2000, pp. 602-632.
[29] G. Rega, “Nonlinear vibrations of suspended cables. Part I: modeling and
analysis,” in Applied Mechanics Reviews, vol. 57, no. 1–6, 2004, pp. 443–478.
[30] G. Rega, “Nonlinear vibrations of suspended cables. Part II: deterministic
phenomena,” Applied Mechanics Reviews, vol. 57, no. 1–6, 2004, pp. 479–514.
[31] J.W. Hijmissen, N.W. van den Heuvel, and W.T. van Horssen, "On the effect of
the bending stiffness on the damping properties of a tensioned cable with an
attached tuned-mass-damper," Engineering Structures, 31, 2009, pp. 1276- 1285.
[32] S.H. Sandilo, and W.T. van Horssen, "On boundary damping for an axially
moving tensioned beam," Journal of Vibration and Acoustics, 134, 2012, pp.
0110051-0110058.
[33] H. Wang, A. R. Elcrat, and R. I. Egbert, "Modelling and boundary control of
conductor galloping," Journal of Sound and Vibration, 161, 1993, pp. 301-315.
[34] A.Naço, L.Hanelli, B.Huti: “Algoritmimi dhe implementimi numerik i një metode
të tipit të karakteristikave për zgjidhjen e një problemi diferencial hiperbolik të
dobët” – prezantuar në konferencën kombëtare “Studime të Avancuara në
Inxhinierinë Matematike, Fizike dhe Kimike”, Universiteti Politeknik i Tiranës,
Tiranë 2011.
[35] S.M. Cox, P.C. Matthews, ”Exponential Time Differencing for Stiff Systems”, J.
Comput. Phys,176:430-455, 2002.
[36] Kassam, L.N. Trefethen, ”Fourth-Order Time Stepping for Stiff PDEs”, SIAM J.
Sci. Comput,26:1214-1233, 2005.

79
[37] D. J. Korteweg, and G. de Vries, ”On the change of form of long waves advancing
in a rectangular canal, and on a new type of long stationary waves”, Philosophical
Magazine,39:422-443, 1985.
[38] J. Canosa, and J. Gazdag, ”The Korteweg-de Vries-Burgers equation”, J. Comput.
Phys,23:393-403, 1977.
[39] D. L. Russell and B. Y. Zhang, ”Stabilization of the Korteweg-de Vries equation
on a periodic domain, in Control and optimal design of distributed parameter
systems” (Minneapolis, MN, 1992), IMA Vol. Math. Appl,Springer,70:195-211,
1995.
[40] M.E. Schonbek and S.V. Rajopadhye, ”Asymptotic behaviour of solutions to the
Korteweg-de VriesBurgers system”, Ann. Inst. H. Poincar Anal. Non
Linaire,12:425–457, 1995.
[41] L.H. Zhang, ”Decay of solutions of a higher order multidimensional nonlinear
Korteweg-de VriesBurgers system”, Proc. Roy. Soc. Edinburgh Sect. A, 124:263-
271, 1994.
[42] M. T. Darvishia, F. Khanib and S. Kheybaria, Numerical Solution of the KdV-
Burgers Equation by Spectral Collocation Method and Darvishis Preconditionings,
Int. J. Contemp. Math. Sciences,2:1085–1095,2007.
[43] Johnson. R. S, ”A nonlinear equation incorporating damping and dispersion”,J
Fluid Mech,42:49–60, 1970.
[44] De La Hoz, F. and Vadillo. F, ”An exponential time differencing method for the
nonlinear Schrdinger equation”, Computer Physics Communications,179: 449–456,
2008.
[45] J.L. Bona, M.E. Schonbek, ”Traveling wave solutions to Kortewegde
VriesBurgers equation”, Proc. Roy. Soc. Edinburgh Sect. A 101: 207–226, 1985.
[46] Zh.Feng, Q.Meng, ”Burgers-Korteweg-de Vries equation and its traveling solitary
waves”, Science in China Series A: Mathematics 50: 412–422,2007.
[47] B. Dahlquist: Error analysis for a class of methods for stiff nonlinear initial value
problems, Lecture Notes in Mathematics 506, New York (1974; faqe 60-74)
[48] Expint — A matlab1 package for exponential integrators
https://www.math.ntnu.no/num/expint/matlab.php

80
Shtojcë
Sh1: Skedar-funksioni Matlab mdfrl.m
Ky skedar realizon zgjidhjen numerike të problemit kufitar linear
y’’ = p(x)y’ + q(x)y + r(x), y(a) = A, y(b) = B
me metodën e diferencave të fundme
function [x y]=mdfrl(a,A,b,B,N)
close all
global p q r
h=(b-a)/(N+1);
x=(a+h):h:(b-h);
for i=1:N
aa(i)=2+h^2*q(x(i));
bb(i)=-1+h/2*p(x(i));
cc(i)=-2-bb(i);
end
for i=2:(N-1)
dd(i)=-h^2*r(x(i));
end
dd(1)=-h^2*r(x(1))-cc(1)*A;
dd(N)=-h^2*r(x(N))-bb(N)*B;
bb(N)=[]; cc(1)=[];
AA=diag(aa)+diag(cc,-1)+diag(bb,1);
d=d';
y=AA\d;
x=x';
x=[a;x;b];
y=[A;y;B];
plot(x,y,'r*');
Sh2: Skedar-funksioni Matlab mdfrjl.m
Ky skedar realizon zgjidhjen numerike të problemit kufitar jolinear
y’’(x) = g(x,y,y’), y(a) = A, y(b) = B
me metodën e diferencave të fundme. Skedari duhet plotësuar me skedarët ndihmës
g.m, gy.m dhe dgy.m që i korrespondojnë respektivisht funksionit g më lart, derivatit
të pjesshëm të tij g'y dhe derivatit të pjesshëm g'y'.
function y=mdfrjl(a,b,A,B,N,M)
h=(b-a)/(N+1);
t0=(B-A)/(b-a);
for i=1:N
y(i)=A+i*h*t0;
end
y=y';
for k=1:M
x=a+h;
t=(y(2)-A)/(2*h);
aa(1)=2+h^2*gy(x,y(1),t);
bb(1)=-1+(h/2)*dgy(x,y(1),t);
dd(1)=-(2*y(1)-y(2)-A+h^2*g(x,y(1),t));
for i=2:N-1
x=a+i*h;
t=(y(i+1)-y(i-1))/(2*h);
aa(i)=2+h^2*gy(x,y(i),t);
bb(i)=-1+(h/2)*dgy(x,y(i),t);
cc(i)=-1-(h/2)*dgy(x,y(i),t);
dd(i)=-(2*y(i)-y(i+1)-
y(i-1)+h^2*g(x,y(i),t));
end x=b-h;
t=(B-y(N-1))/(2*h);
aa(N)=2+h^2*gy(x,y(N),t);
cc(N)=-1-(h/2)*dgy(x,y(N),t);
dd(N)=-(2*y(N)-y(N-1)-B+h^2*g(x,y(N),t));
J=diag(aa)+diag(cc,-1)+diag(bb,1);
y=y-inv(J)*F(y);
end
function p=F(y)
% Ky funksion llogarit anët e majta te sistemit
% (2.40) për ekuacionin diferencial që zgjidhet
h=(b-a)/(N+1);
x=a+h;
p(1)=2*y(1)-y(2)-A+h^2*g(x,y(1),(y(2)-
A)/(2*h));
for i=2:N-1
x=a+i*h;
p(i)=-y(i-1)+2*y(i)-
y(i+1)+h^2*g(x,y(i),(y(i+1)-y(i-1))/(2*h));
end
x=b-h;
p(N)=-y(N-1)+2*y(N)-B+h^2*g(x,y(N),(B-y(N-
1))/(2*h));

81
Sh3: Skedarët Matlab për implementimin e metodës Galerkin të paragrafit
2.5.4.3
nel=100; nnel=2; ndof=1; nnode=101; acoef=1; bcoef=-3; ccoef=2; sdof=nnode*ndof; x=linspace(0,1,nnode); for i=1:nnode gcoord(i)=x(i); end for i=1:nel nodes(i,1)=i; nodes(i,2)=i+1; end %% bcdof(1)=1; bcval(1)=0; ff=zeros(sdof,1); kk=zeros(sdof,sdof); index=zeros(nnel*ndof,1); for iel=1:nel nl=nodes(iel,1);nr=nodes(iel,2); xl=gcoord(nl);xr=gcoord(nr); elen=xr-xl; index=feeldof92(iel,nnel,ndof); k=
feode92(acoef,bcoef,ccoef,elen); f=fef1l(xl,xr); [kk,ff]=feasmbl92(kk,ff,k,f,index); end ff(nnode)=ff(nnode)-1; [kk,ff]=applybc92(kk,ff,bcdof,bcval); fsol=kk\ff; c1=(1+0.5*exp(1))/(2*exp(2)-exp(1)); c2=-(1+exp(2))/(2*exp(2)-exp(1)); for i=1:nnode x=gcoord(i); esol(i)=c1*exp(2*x)+c2*exp(x)+1/2; e(i)=norm(esol(i)-fsol(i),inf); end
num=1:1:sdof; disp(' num fsol esol error'); [num' fsol esol' e'] mean(e) plot(num,fsol,'r*-',num,esol,'k-') xlabel('Time') ylabel('Solution at node')
function [k]=feode92(acoef,bcoef,ccoef,elen); a1=-(acoef/elen);a2=bcoef/2;a3=ccoef*elen/6; k=[a1-a2+2*a3 -a1+a2+a3;... -a1-a2+a3 a1+a2+2*a3];
function f=fef1l(xl,xr); elen=xr-xl; f=1/2*[elen;elen];
function [kk,ff]=feasmbl92(kk,ff,k,f,index); edof=length(index); for i=1:edof ii=index(i); ff(ii)=ff(ii)+f(i); for j=1:edof jj=index(j); kk(ii,jj)=kk(ii,jj)+k(i,j); end end function [kk,ff]=applybc92(kk,ff,bcdof,bcval); n=length(bcdof); sdof=size(kk); for i=1:n c=bcdof(i); for j=1:sdof kk(c,j)=0; end kk(c,c)=1; ff(c)=bcval(i); end

82
Sh4: Skedar-funksioni Matlab fmain.m
Ky është skedari kryesor për zgjidhjen numerike të problemit diferencial special
(3.1) - (3.5) sipas metodës së përshkruar në paragrafin 3.1 të këtij studimi. Skedari
fmain.m duhet plotësuar me skedarët ndihmës:
fi.m - për funksionin x në formulën (3.4)
dux.m - për derivatin x të funksionit x më sipër
dut.m - për funksionin x në formulën (3.5)
iml.m - për funksionin që matlabizon ekuacionin implicit (3.17)
function F=fmain(fi,dux,dut,alfa)
global pp qq kkk PP QQ KKK
epsi=0.1; kk=epsi*alfa;
m=30; N=8*m;
h=pi/m; kkk=epsi*h/8;
H=2*h; KKK=epsi*H/8;
u=zeros(N+1,m+1); ut=u; ux=u;
x=linspace(0,pi,m+1);
u(1,1:m+1)=feval(fi,x);
ux(1,1:m+1)=feval(dux,x);
xint=x; xint(3.1)=[]; xint(end)=[];
ut(1,2:m)=feval(dut,xint);
ut(1,m+1)=-kk*ux(1,m+1);
for i=1:N
for k=1:(m+1)
a(k)=ut(i,k)-1/3*ut(i,k).^3;
end
for j=1:m
bux(j)=(ux(i,j)+ux(i,j+1)+ut(i,j+1)-
ut(i,j))/2+kkk*(a(j+1)-a(j));
pp=(-ux(i,j)+ux(i,j+1)+ut(i,j+1)+ut(i,j))/2;
qq=a(j+1)+a(j);
but(j)=fzero('impl',ut(i,j));
bu(j)=(u(i,j)+u(i,j+1))/2+h/8*(ux(i,j)-
ux(i,j+1)+ut(i,j)+2*but(j)+ut(i,j+1));
end
for k=1:m
b(k)=but(k)-1/3*but(k).^3;
end
for j=2:m
ux(i+1,j)=(bux(j-1)+bux(j)+but(j)- but(j-
1))/2+kkk*(b(j)-b(j-1));
pp=(-bux(j-1)+bux(j)+but(j)+but(j-1))/2;
qq=b(j)+b(j-1);
ut(i+1,j)=fzero('impl',but(j-1));
u(i+1,j)=(bu(j-1)+bu(j))/2+h/8*(bux(j-1)-
bux(j)+but(j-1)+2*ut(i+1,j)+but(j));
end
for j=1:(m-1) cux(j)=(ux(i,j)+ux(i,j+2)+ut(i,j+2)-
ut(i,j))/2+KKK*(a(j+2)-a(j));
PP=(-ux(i,j)+ux(i,j+2)+ut(i,j+2)+ut(i,j))/2;
QQ=a(j+2)+a(j);
cut(j)=fzero('impl2',ut(i,j));
cu(j)=(u(i,j)+u(i,j+2))/2+H/8*(ux(i,j)-
ux(i,j+2)+ut(i,j)+2*cut(j)+ut(i,j+2));
end
u(i+1,2:m)=(4*u(i+1,2:m)-cu)./3;
ux(i+1,2:m)=(4*ux(i+1,2:m)-cux)./3;
ut(i+1,2:m)=(4*ut(i+1,2:m)-cut)./3;
aa=polyfit(x(m-2:m), u(i+1,m-2:m),2);
u(i+1,m+1)=polyval(aa,x(m+1));
ux(i+1,1)=(-u(i+1,3)+4*u(i+1,2)-
3*u(i+1,1))/(2*h);
ux(i+1,m+1)=(u(i+1,m-1)-
4*u(i+1,m)+3*u(i+1,m+1))/(2*h);
ut(i+1,m+1)=-kk*ux(i+1,m+1);
end
t=0:h:N*h;
[X,T]=meshgrid(x,t);
surf(X,T,u);

83
Sh5: Skedari Matlab BKDV.m për llogaritjen e zgjidhjes dhe realizimin e
figurave (3.11), (3.12) dhe (3.15) të paragrafit 3.2
% Diskretizimi i zones dhe kushtet fillestare: N = 2^7; x=(2*pi/N)*(-N/2:N/2-1)'; a=1; b=1.5; s=3; T=1.2; U=@(x,t)(3*b^2/25*a*s)*(sech(1/2*((-
b/5*s).*x+(6*b^3/125*s^2).*t))).^2-(6*b^2/25*a*s).*tanh(1/2*((-
b/5*s).*x+(6*b^3/125*s^2).*t))+(6*b^2/25*a*s); u = U(x,0); % kushtet fillestare v = fft(u); % Llogariten madhesite skalare te ETDRK4: dt = 2e-4;; h = dt; % hapi sipas ndryshores kohore k = [0:N/2-1 0 -N/2+1:-1]'; % koeficienti valor L =-b*k.^2+1i*s*k.^3; % faktoret Furie E = exp(h*L); E2 = exp(h*L/2); M = 16; r = exp(1i*pi*((1:M)-.5)/M); % rrenjet e 1 LR = h*L(:,ones(M,1)) + r(ones(N,1),:); Q = h*real(mean( (exp(LR/2)-1)./LR ,2)); f1 = h*real(mean( (-4-LR+exp(LR).*(4-3*LR+LR.^2))./LR.^3 ,2)); f2 = h*real(mean( (2+LR+exp(LR).*(-2+LR))./LR.^3 ,2)); f3 = h*real(mean( (-4-3*LR-LR.^2+exp(LR).*(4-LR))./LR.^3 ,2)); % Cikli kryesor sipas ndryshores t uu = u; tt = 0; tmax = 20; nmax = round(tmax/h); nplt = floor((tmax/100)/h); g = -0.5i*k; for n = 1:nmax t = n*h; Nv = g.*fft(real(ifft(v)).^2); a = E2.*v + Q.*Nv; Na = g.*fft(real(ifft(a)).^2); b = E2.*v + Q.*Na; Nb = g.*fft(real(ifft(b)).^2); c = E2.*a + Q.*(2*Nb-Nv); Nc = g.*fft(real(ifft(c)).^2); v = E.*v + Nv.*f1 + 2*(Na+Nb).*f2 + Nc.*f3; if mod(n,nplt)==0 u = real(ifft(v)); uu = [uu,u]; tt = [tt,t]; end end % Paraqitja grafike e rezultateve: %surf(tt,x,uu), %lighting phong, axis tight %view([-45 60]), colormap(cool), light('col',[1 1 0],'pos',[-10 0
10]) %xlabel('x') %ylabel('u') plot(x,U(x,0),'k*',x,U(x,T),'r*')%Profilet e zgjidhjes solitare legend('u(x,t=0)','u(x,t=1.2)') %plot(x,uu(:,1),'b*',x,U(x,0),'r.')%Exact~Simulated Solution %legend('Zgjidhja e simuluar','Zgjidhja egzakte') title('Dy profile të zgjidhjes së ekuacionit (3.31) - (3.32) ')