hevの車両全体シミュレーションによるシステム最適化 · •...
TRANSCRIPT

1© 2016 The MathWorks, Inc.
HEVの車両全体シミュレーションによるシステム最適化
MathWorks Japanアプリケーションエンジニアリング部アプリケーションエンジニア張 莉

2
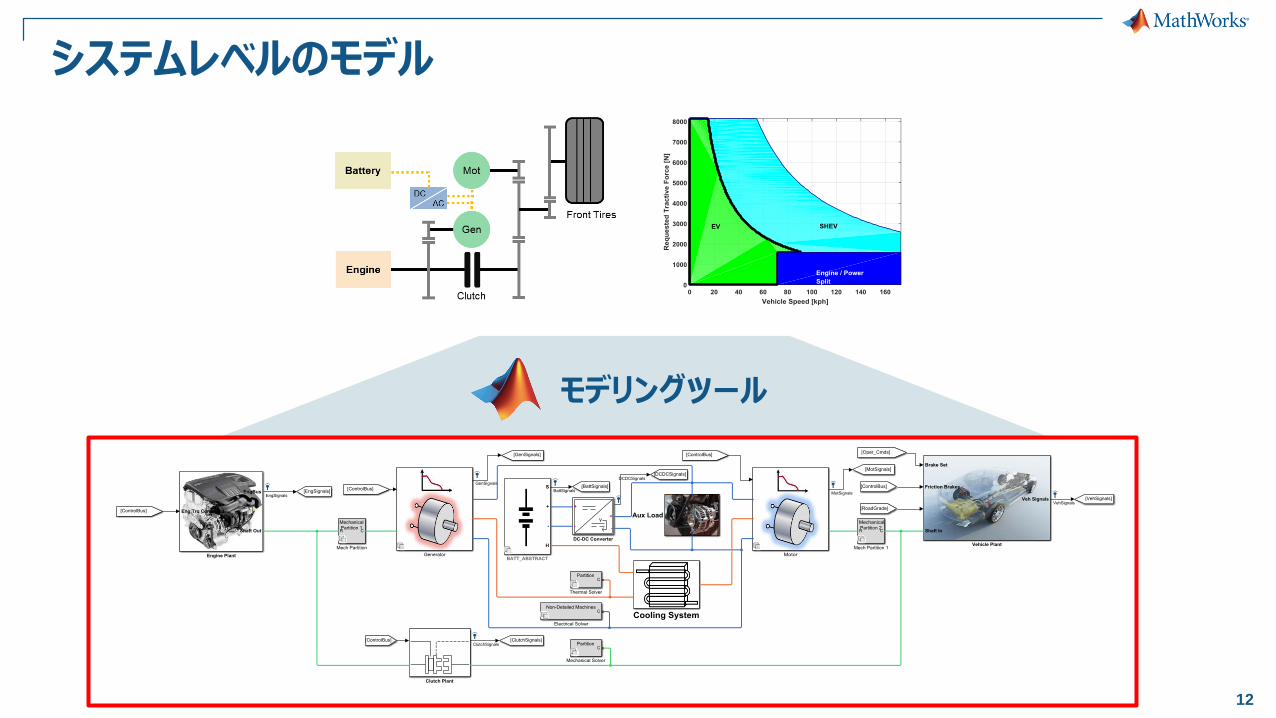
Engine Mode
SHEV ModeEV Mode
マルチモード ハイブリッド自動車
1. Higuchi, N., Sunaga, Y., Tanaka, M., Shimada, H.: Development of a New Two-Motor Plug-In Hybrid System, SAE 2013-01-1476 (2013)

3
システム設計の段階の課題
コスト削減燃費向上小型軽量化
部品構成・点数削減
バッテリーの小型化
コンパクトな車体設計
軽い材料の使用
部品構成・点数削減
ユニット原価削減
試作回数の削減
開発の不具合を最小化(手戻り防止)
バッテリー容量の向上
エネルギー回生
エネルギーマネジメントの最適化
アイドルストップ
最初からシステム全体の把握が大事。早い段階での検証が必要。
システム全体への影響、他の性能とのトレードオフ、どこまで最適化できる?
複雑なハイブリッドシステムだからこそ、机上で1Dシミュレーションによる検討・検証が重要
システム全体への影響は?走行性能・安全性能…どこまでの小型化が最適?

4
物事の「本質」を的確にとらえ、「機能」を見通しのよい形式でシンプルに表現すること
1D シミュレーションとは?
単純に空間的な1次元の意味ではなく・・・
例えば、物理系の場合、
システム設計に必要な物理的な振る舞いを抽出・再現 (抽象化)
車両
トランスミッション
制御器
エンジン
走行パターン
機械・電気・熱・流体などの複合領域の現象を表現しやすい
一般的に 3D に比べてシミュレーション負荷が小さい
詳細な形状・配置 (3D) 決定前の機能・性能検討が一つの使い所
5
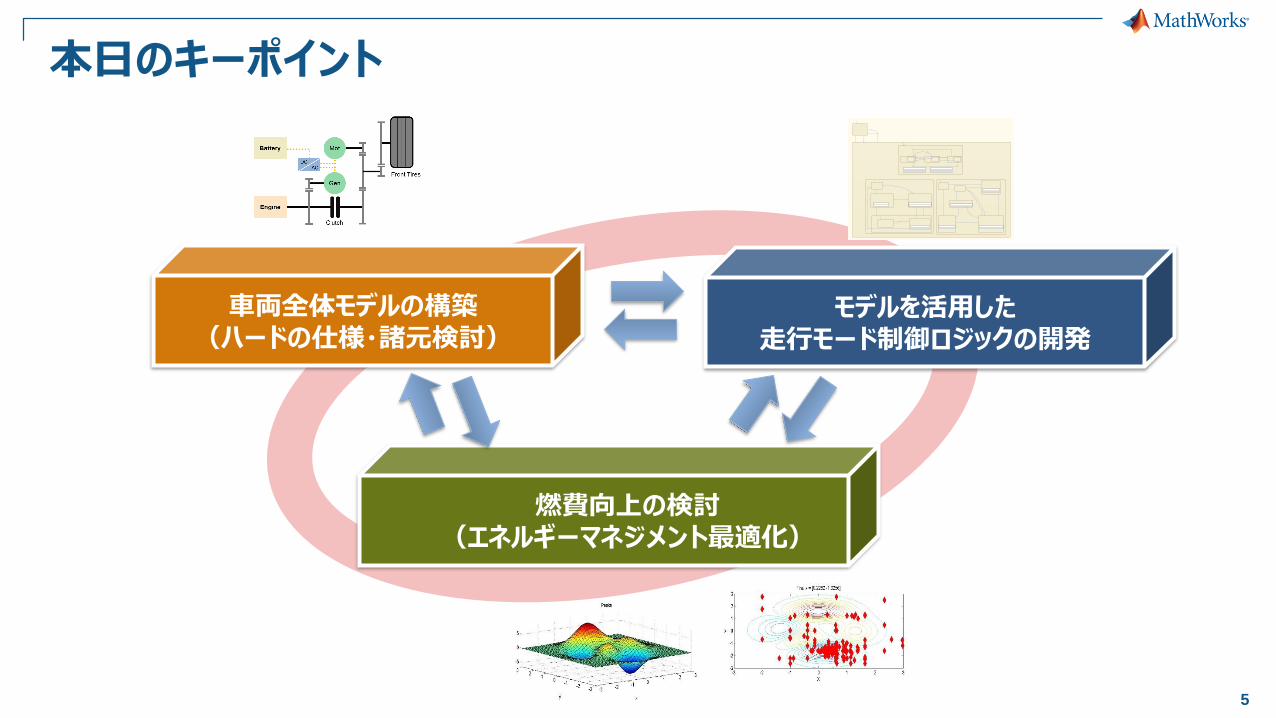
本日のキーポイント
車両全体モデルの構築(ハードの仕様・諸元検討)
モデルを活用した走行モード制御ロジックの開発
燃費向上の検討(エネルギーマネジメント最適化)

6
1. 車両全体1Dモデリング
2. 走行モード制御ロジック開発への応用
3. 燃費最適化への応用
アジェンダ

7
システムの挙動は?
モデリングツール
パフォーマンスは?⇒システムレベルのモデルを構築
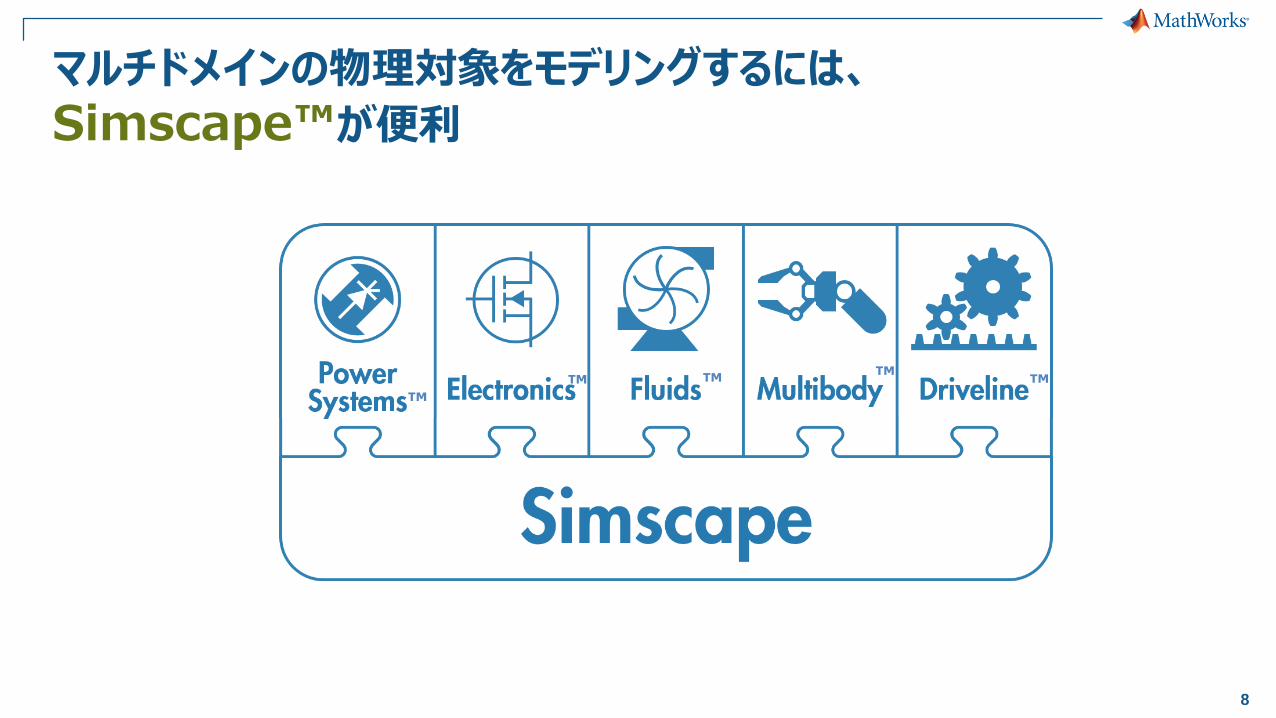
8
マルチドメインの物理対象をモデリングするには、
Simscape™が便利
™™ ™ ™ ™
9
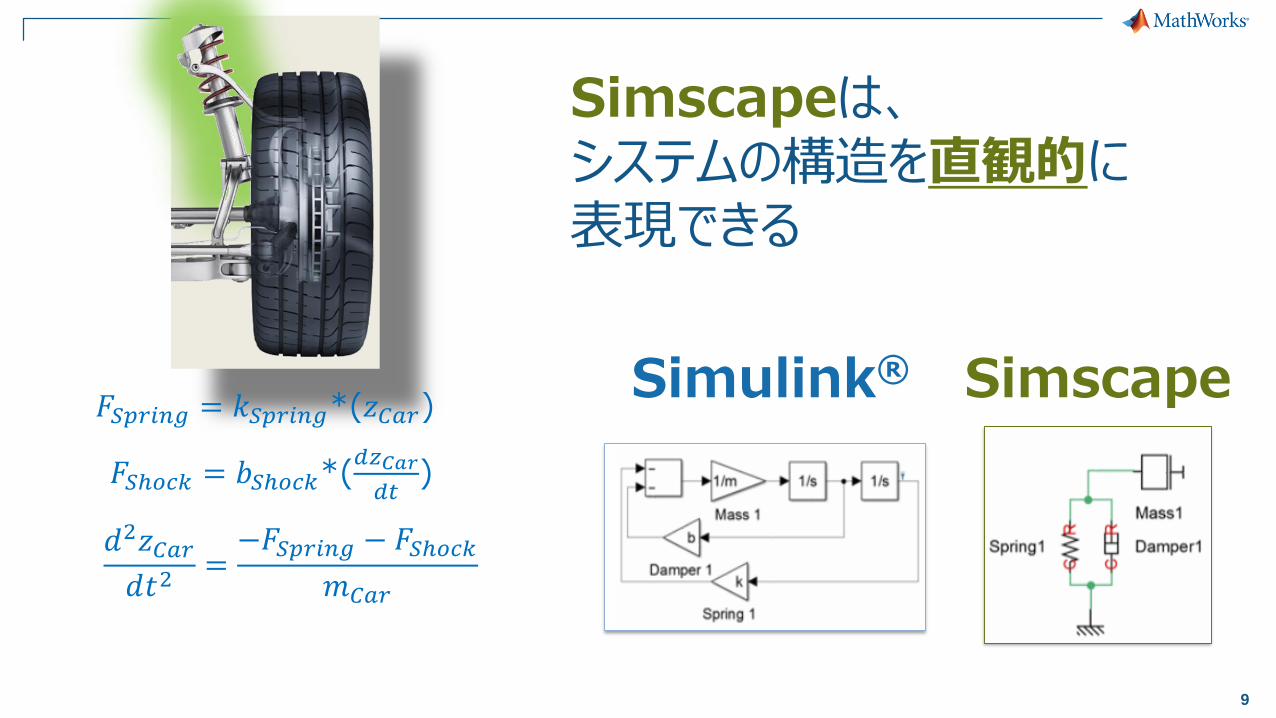
Simscapeは、システムの構造を直観的に表現できる
Simulink® Simscape𝐹𝑆𝑝𝑟𝑖𝑛𝑔 = 𝑘𝑆𝑝𝑟𝑖𝑛𝑔*(𝑧𝐶𝑎𝑟)
𝐹𝑆ℎ𝑜𝑐𝑘 = 𝑏𝑆ℎ𝑜𝑐𝑘*(𝑑𝑧𝐶𝑎𝑟
𝑑𝑡)
𝑑2𝑧𝐶𝑎𝑟𝑑𝑡2
=−𝐹𝑆𝑝𝑟𝑖𝑛𝑔 − 𝐹𝑆ℎ𝑜𝑐𝑘
𝑚𝐶𝑎𝑟

10
𝐹𝑆𝑝𝑟𝑖𝑛𝑔 = 𝑘𝑆𝑝𝑟𝑖𝑛𝑔*(𝑧𝐶𝑎𝑟 − 𝑧Wℎ𝑙)
𝐹𝑆ℎ𝑜𝑐𝑘 = 𝑏𝑆ℎ𝑜𝑐𝑘*(𝑑𝑧𝐶𝑎𝑟
𝑑𝑡−
𝑑𝑧𝑊ℎ𝑙
𝑑𝑡)
𝑑2𝑧𝐶𝑎𝑟𝑑𝑡2
=−𝐹𝑆𝑝𝑟𝑖𝑛𝑔 − 𝐹𝑆ℎ𝑜𝑐𝑘
𝑚𝐶𝑎𝑟
𝐹𝑇𝑖𝑟𝑒 = 𝑘𝑇𝑖𝑟𝑒*(𝑧𝑊ℎ𝑙) + 𝑏𝑇𝑖𝑟𝑒*(𝑑𝑧𝐶𝑎𝑟
𝑑𝑡)
𝑑2𝑧𝑊ℎ𝑙
𝑑𝑡2=𝐹𝑆𝑝𝑟𝑖𝑛𝑔 + 𝐹𝑆ℎ𝑜𝑐𝑘 − 𝐹𝑇𝑖𝑟𝑒
𝑚𝐶𝑎𝑟
Simscapeは、システムの変更や拡張を柔軟に対応できる
Simulink Simscape
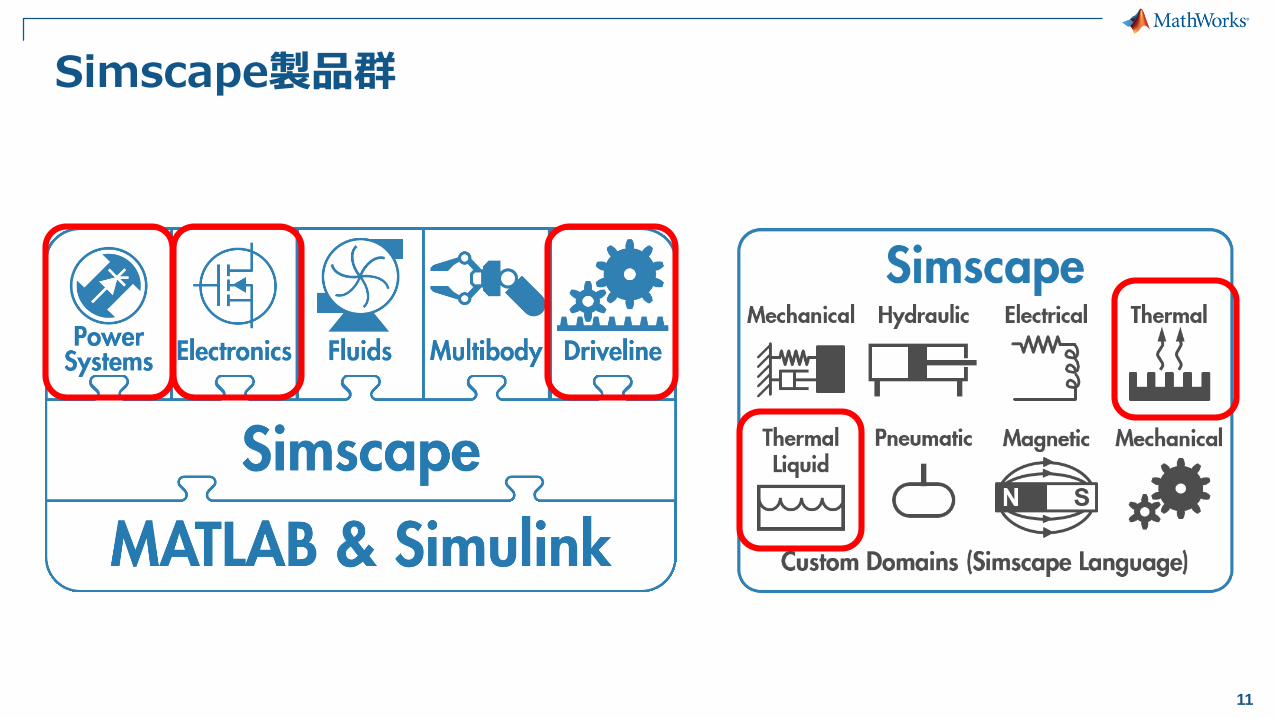
11
Simscape製品群
12
モデリングツール
システムレベルのモデル

13
電気システムプラントモデル用途/目的別に詳細度の異なるライブラリ開発
バッテリー (抽象)• SimPowerSystems• 内部抵抗を含んだ
充電依存ソース
バッテリー(詳細)• Simscape• 熱とSOC依存性を含
んだRC等価回路

14
電気システムプラントモデル用途/目的別に詳細度の異なるライブラリ開発
モータ/インバーター(抽象)• SimElectronics• サーボモータブロック• 最大トルク/速度曲線
効率マップ
モータ/インバーター(詳細)• SimPowerSystems• PMSM ブロック(3
相)• IGBTブリッジ(スイッチ
ングダイナミックス)
[3]
15
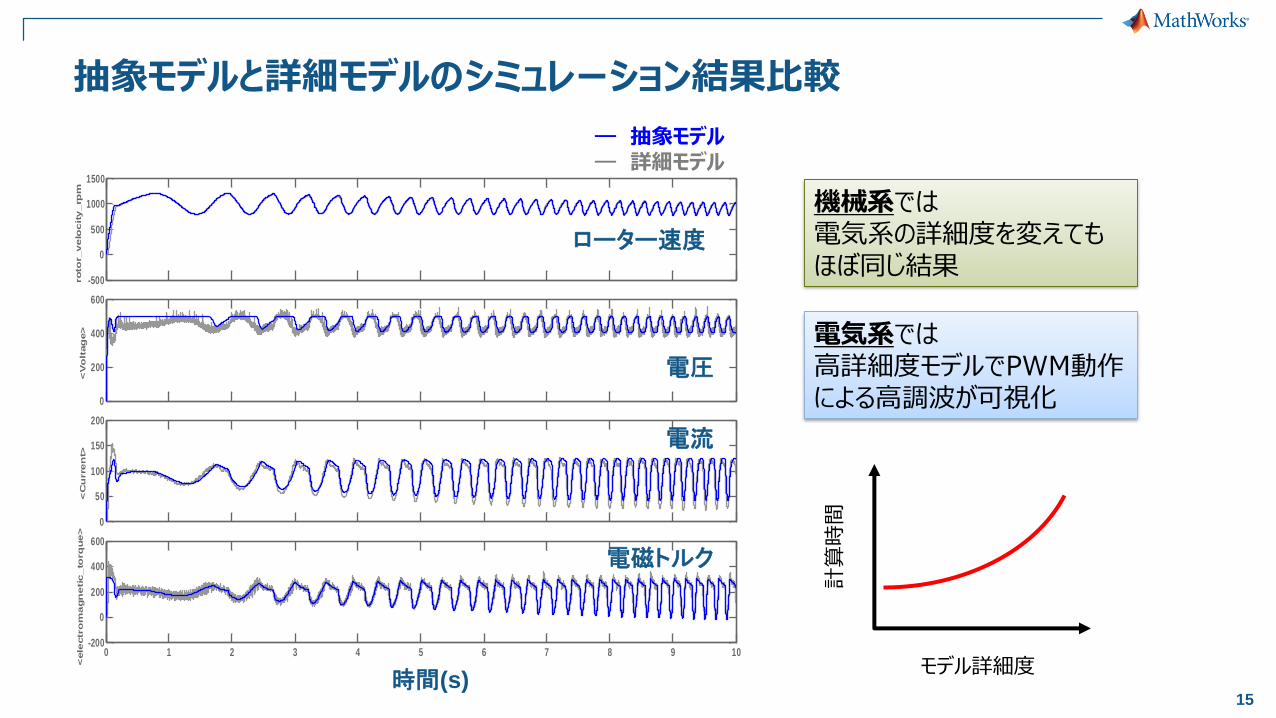
抽象モデルと詳細モデルのシミュレーション結果比較
-500
0
500
1000
1500Chirp
roto
r_velo
city_rp
m
0
200
400
600
<V
olt
ag
e>
0
50
100
150
200
<C
urren
t>
0 1 2 3 4 5 6 7 8 9 10-200
0
200
400
600
<ele
ctro
magn
etic
_to
rq
ue>
Measured vs. Simulated Responses
Time (sec)
Am
plitu
de
電圧
電流
ローター速度
電磁トルク
時間(s)
― 抽象モデル― 詳細モデル
機械系では電気系の詳細度を変えてもほぼ同じ結果
電気系では高詳細度モデルでPWM動作による高調波が可視化
計算時間
モデル詳細度

16
可視化したい現象に基づき詳細度を選択
今回、燃費最適化のため、繰り返しシミュレーションが必要なので、実行速度の速い抽象モデルを使用。
プラント(制御対象) 精度 パラメータ 計算速度
抽象モデル
定常特性 少 速
詳細モデル
過渡特性 多 遅

17
熱システムプラントモデル
クーリングシステム• Simscape 熱流体ライブラリ
• モーター、ジェネレーター、バッテリー
• 熱伝導と熱伝達

18
エンジンモデル
• Model Based Calibration Toolbox• 高精度なエンジン統計モデル• 最適なキャリブレーションテーブルを生成

19
車両モデル
パワートレイン• Simscape Driveline• 車両進行方向の車両ダイナミ
クス• タイヤ(マジックフォーミュラ)• 摩擦ブレーキ• デファレンシャルギア/ ギア• ドグクラッチ
20
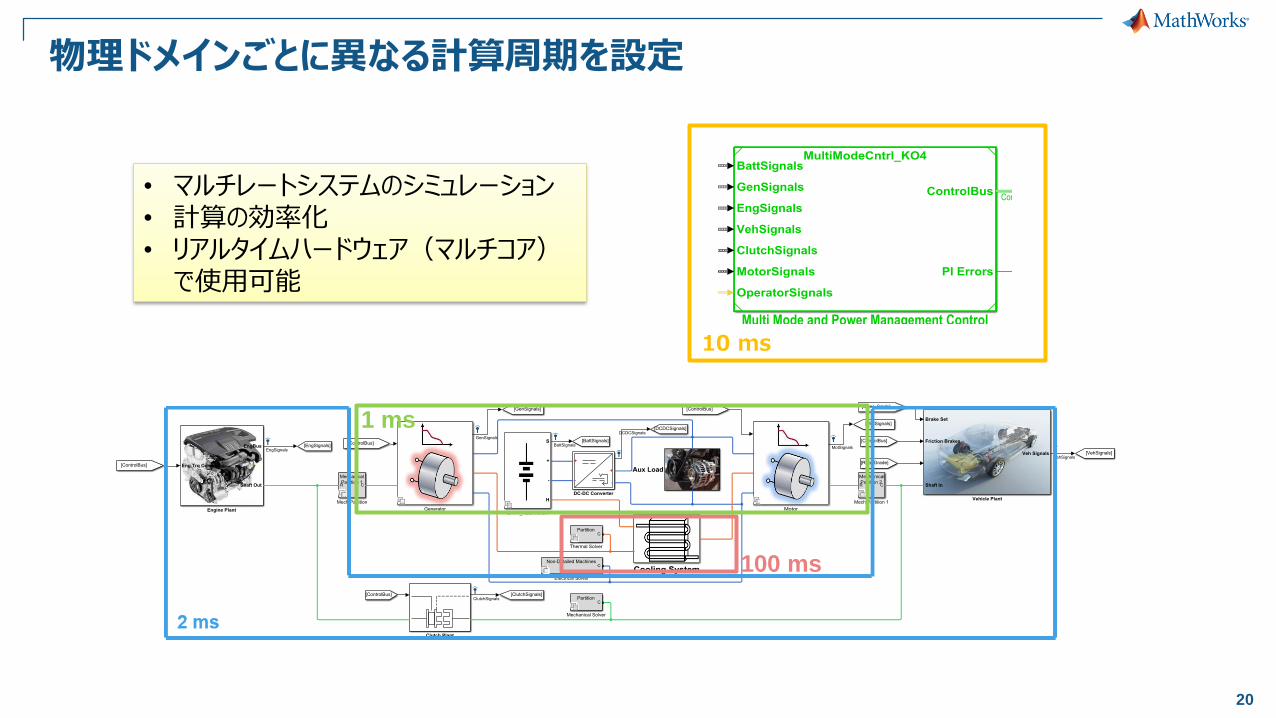
物理ドメインごとに異なる計算周期を設定
• マルチレートシステムのシミュレーション• 計算の効率化• リアルタイムハードウェア(マルチコア)で使用可能
10 ms
100 ms
1 ms

21
1. 車両全体1Dモデリング
2. 走行モード制御ロジック開発への応用
3. 燃費最適化への応用
アジェンダ
22
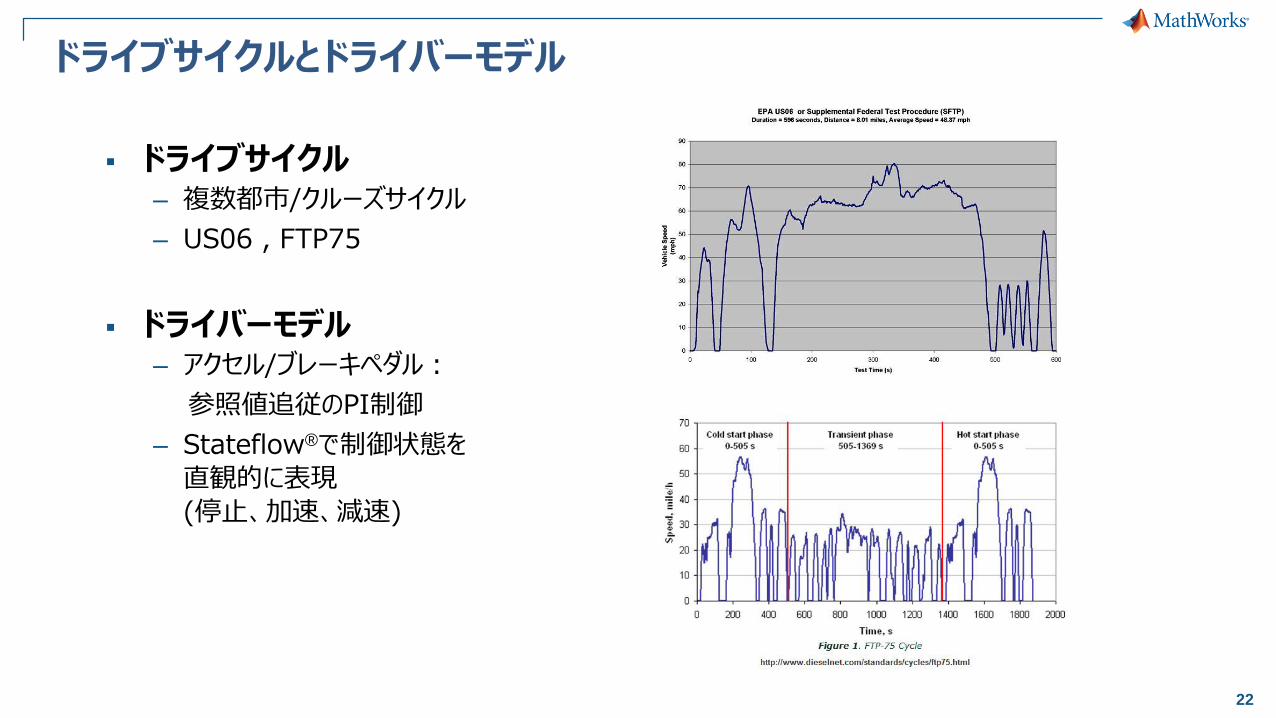
ドライブサイクルとドライバーモデル
ドライブサイクル– 複数都市/クルーズサイクル
– US06 , FTP75
ドライバーモデル– アクセル/ブレーキペダル:
参照値追従のPI制御
– Stateflow®で制御状態を
直観的に表現
(停止、加速、減速)
23
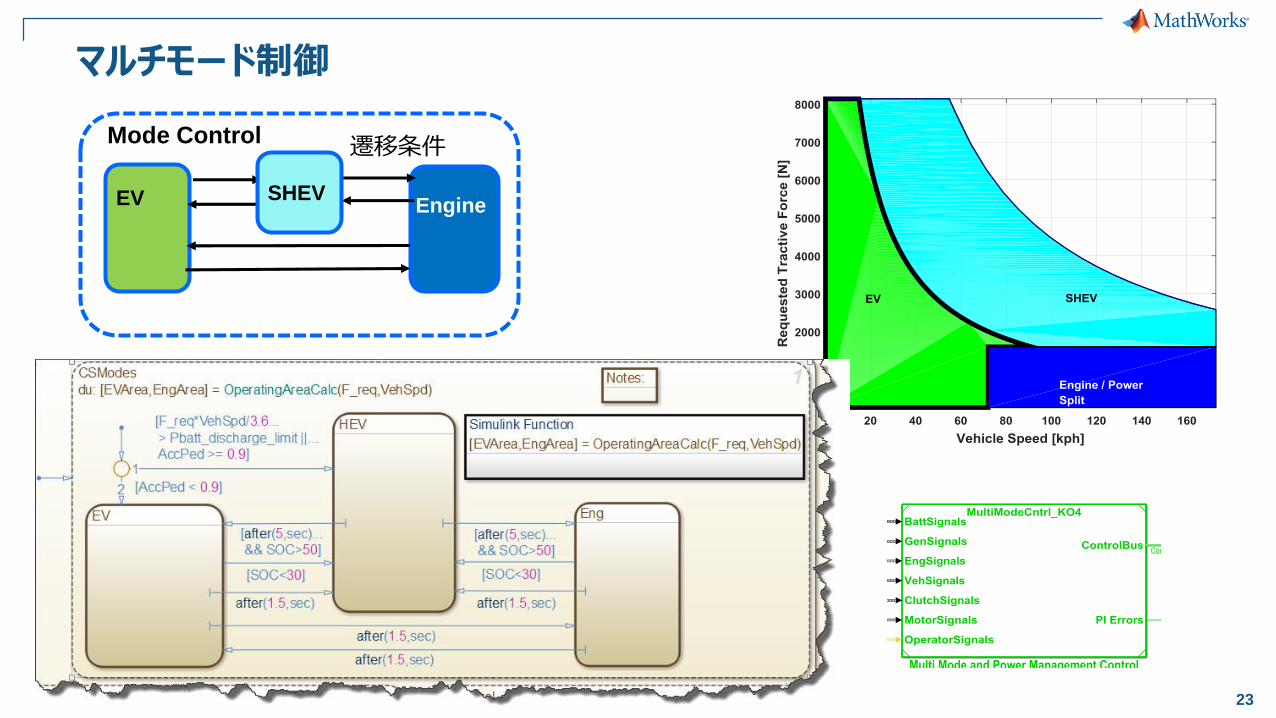
マルチモード制御
Mode Control
EngineEV
遷移条件
SHEV
24
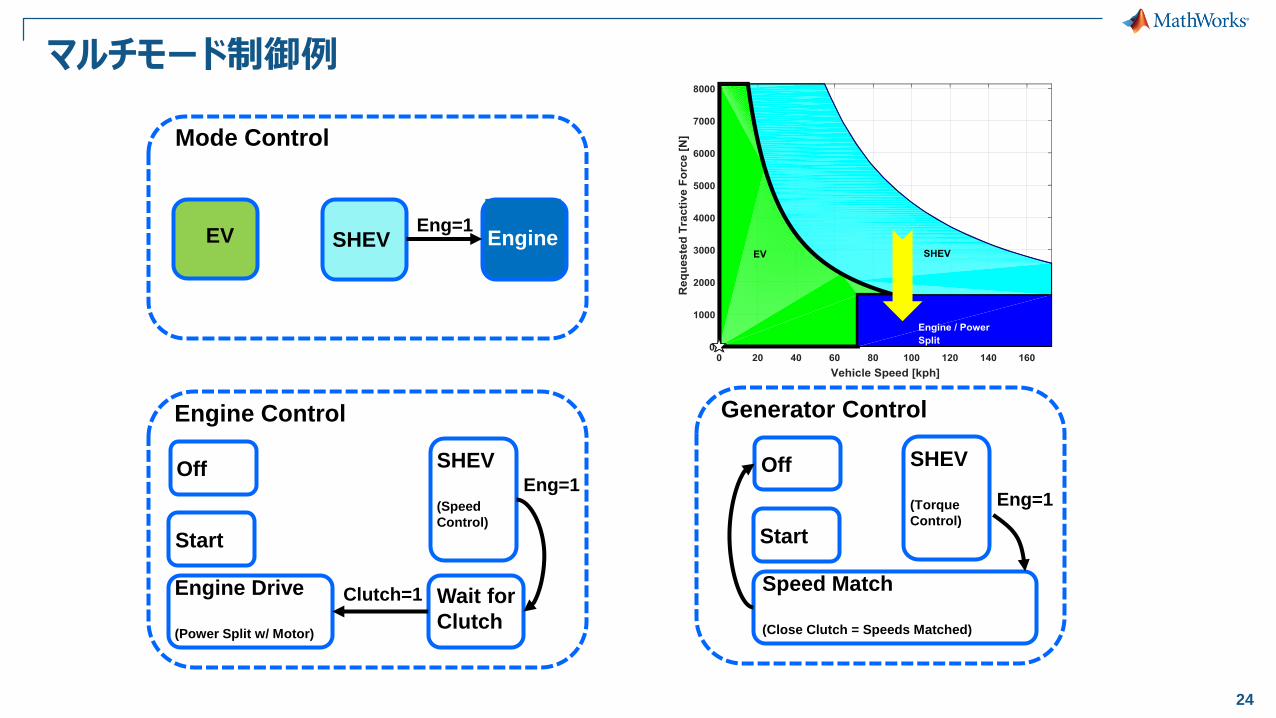
マルチモード制御例
Mode Control
Off
Engine Drive
(Power Split w/ Motor)
Eng=1
Eng=1
Engine Control
Start
SHEV
(Speed
Control)
EngineSHEVEV
Off
Speed Match
(Close Clutch = Speeds Matched)
Eng=1
Generator Control
Start
SHEV
(Torque
Control)
Wait for
Clutch
Clutch=1
25
1. 車両全体1Dモデリング
2. 走行モード制御ロジック開発への応用
3. 燃費最適化への応用
アジェンダ
26
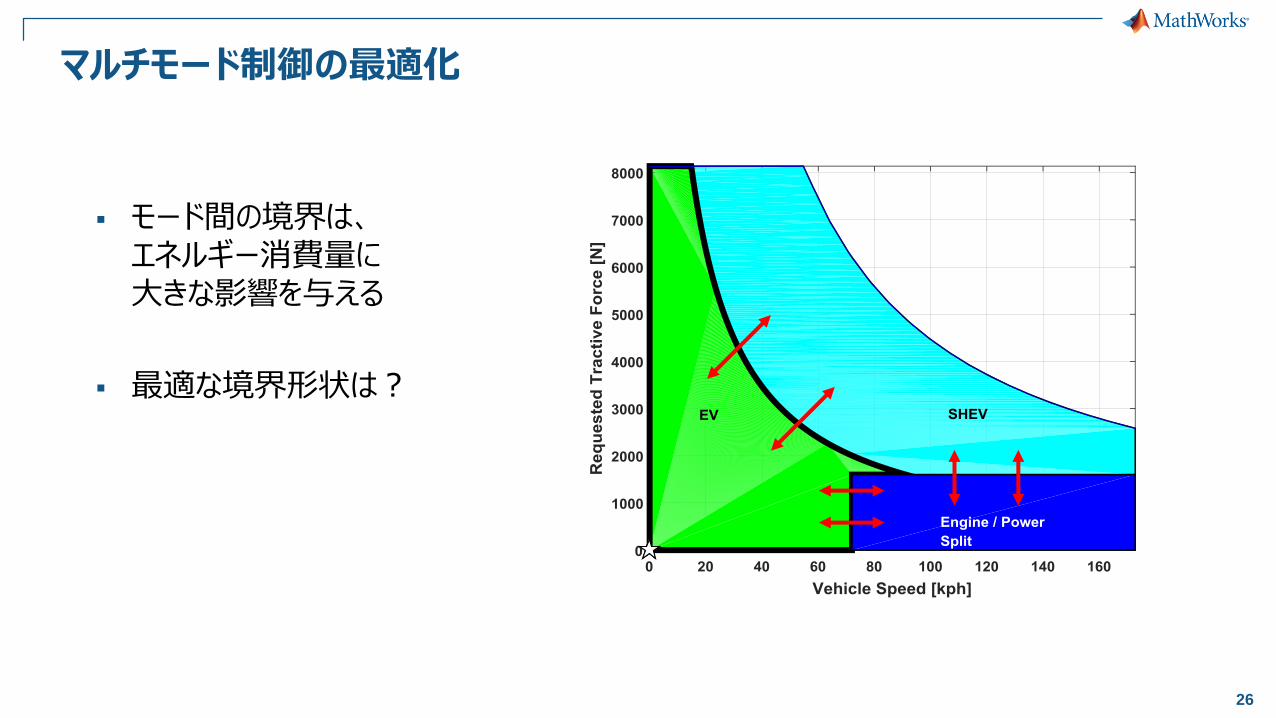
マルチモード制御の最適化
モード間の境界は、エネルギー消費量に大きな影響を与える
最適な境界形状は?
27
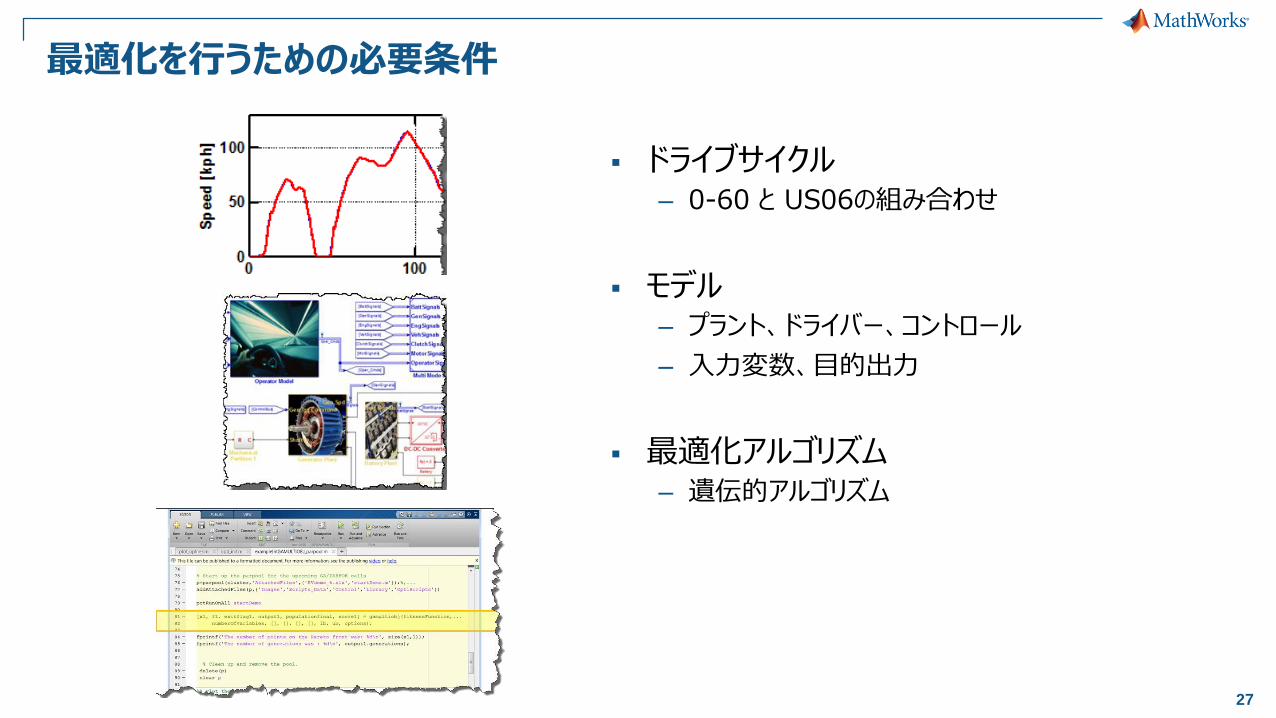
最適化を行うための必要条件
ドライブサイクル– 0-60 と US06の組み合わせ
モデル– プラント、ドライバー、コントロール
– 入力変数、目的出力
最適化アルゴリズム– 遺伝的アルゴリズム
28
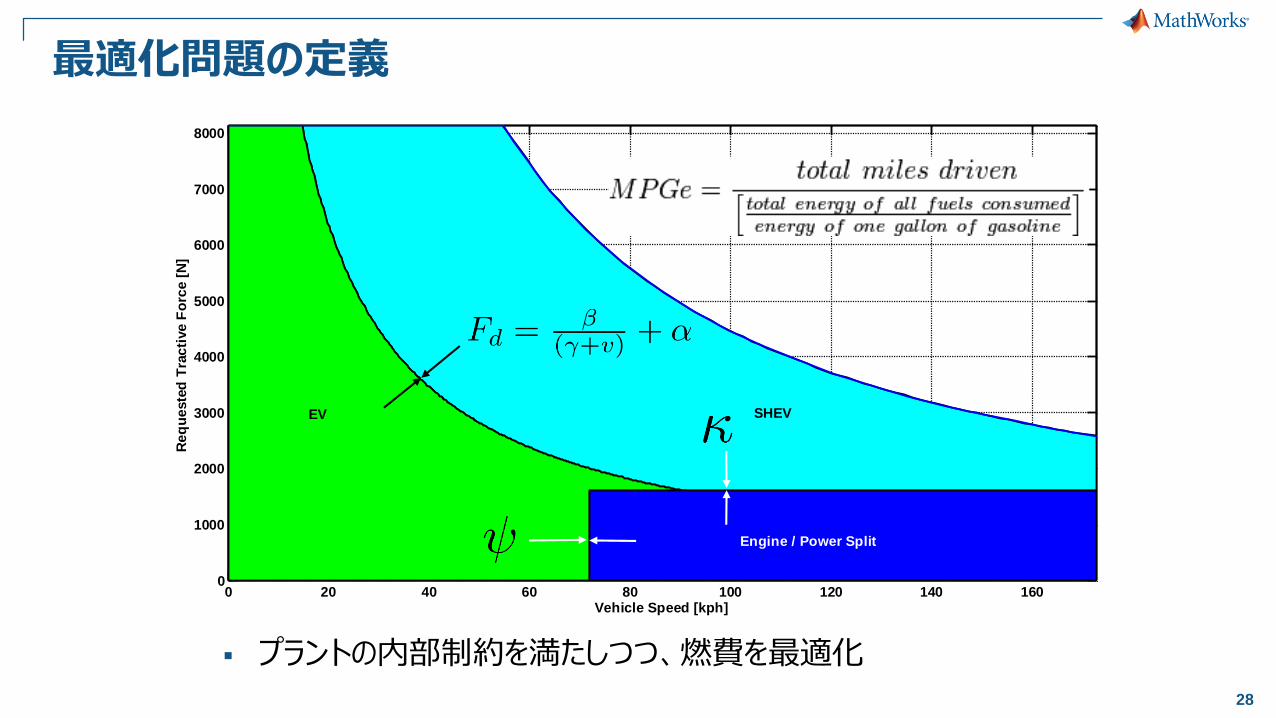
最適化問題の定義
プラントの内部制約を満たしつつ、燃費を最適化
0 20 40 60 80 100 120 140 1600
1000
2000
3000
4000
5000
6000
7000
8000
Vehicle Speed [kph]
Re
qu
este
d T
rac
tive
Fo
rce [
N]
EV SHEV
Engine / Power Split
29
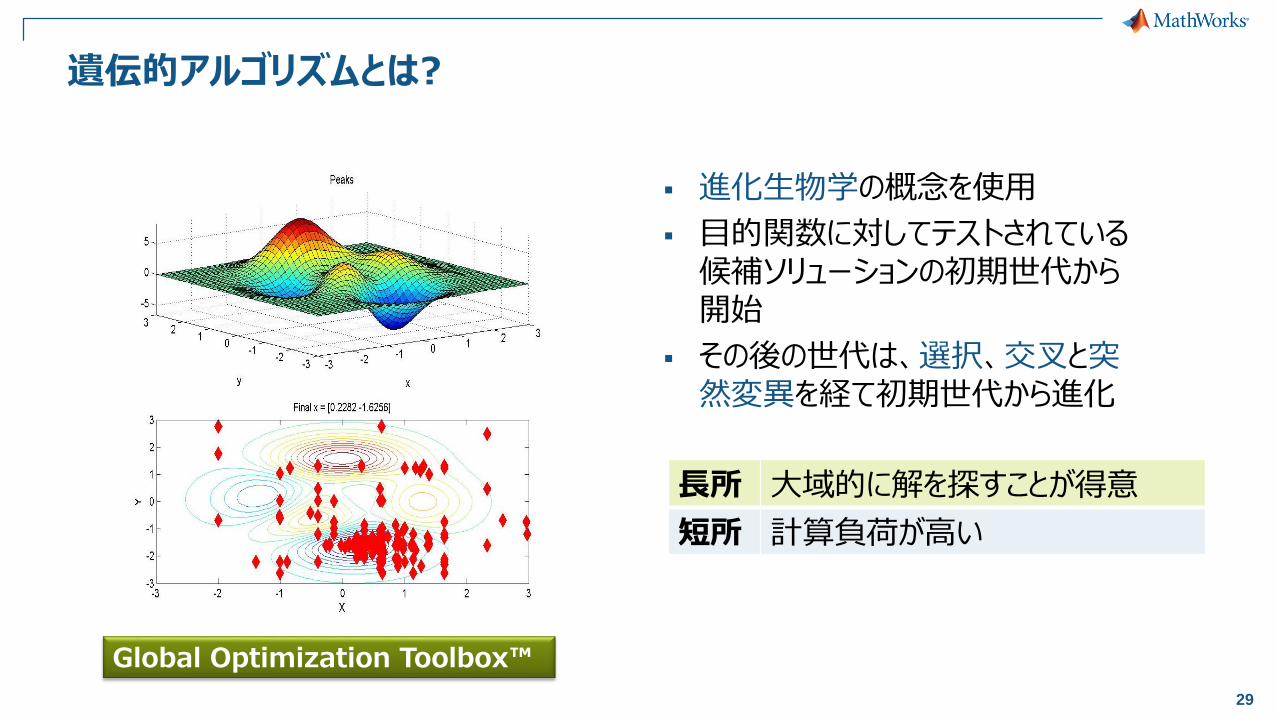
遺伝的アルゴリズムとは?
進化生物学の概念を使用
目的関数に対してテストされている候補ソリューションの初期世代から開始
その後の世代は、選択、交叉と突然変異を経て初期世代から進化
長所 大域的に解を探すことが得意
短所 計算負荷が高い
Global Optimization Toolbox™

30
最適化プロセスの高速化Parallel Computing Toolbox™
複数シミュレーションの並列実行– 複数のコア/プロセッサで
複数のシミュレーションを並列実行
– トータルのシミュレーション実行時間の
大幅な短縮
– MATLAB Distributed
Computing Serverによる
コンピュータクラスタを
用いた並列処理 …
Computer Cluster
Workers
… …シミュレーションの並列実行による
テストプロセスの高速化
Desktop System
Workers
… …
Simulation 1
Simulation 2
for parfor
HEV Model
31
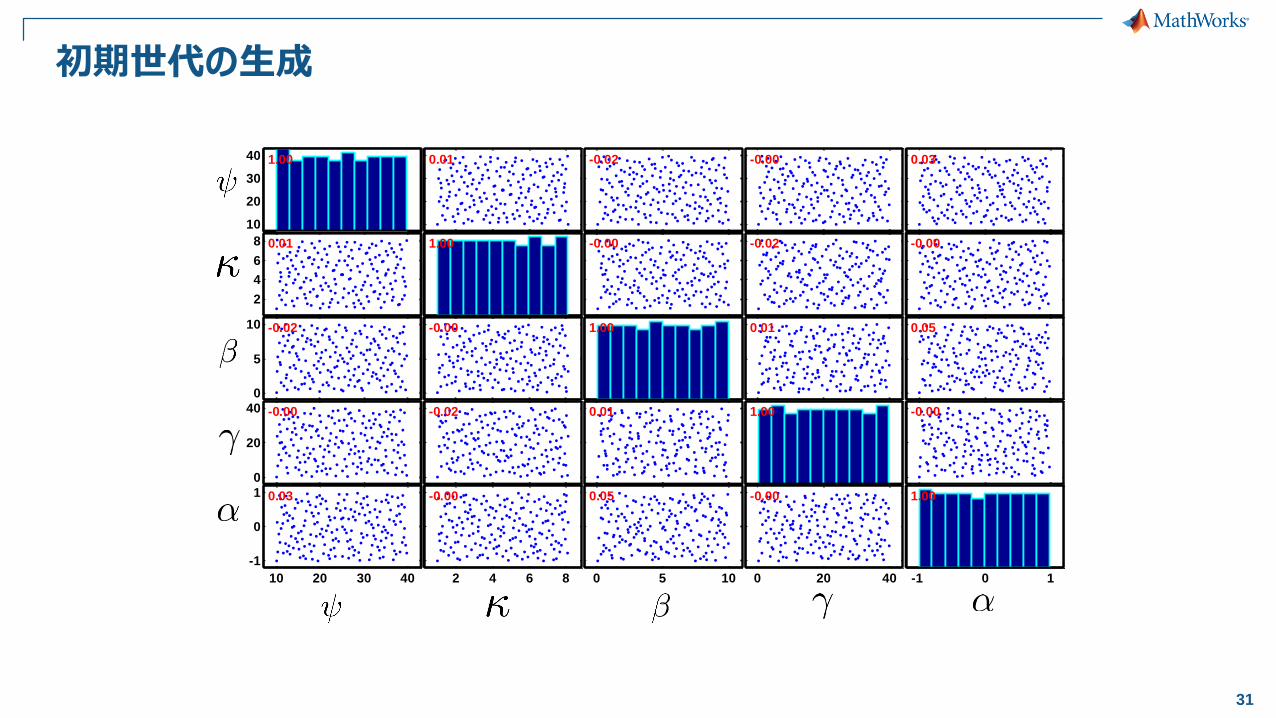
初期世代の生成
-1 0 10 20 400 5 102 4 6 810 20 30 40
-1
0
1
0
20
40
0
5
10
2
4
6
8
10
20
30
40 1.00
0.01
-0.02
-0.00
0.03
0.01
1.00
-0.00
-0.02
-0.00
-0.02
-0.00
1.00
0.01
0.05
-0.00
-0.02
0.01
1.00
-0.00
0.03
-0.00
0.05
-0.00
1.00

32
世代の進化
20 40 60 80 100 120 140 160 18020
25
30
35
Population [-]
MP
Ge
33
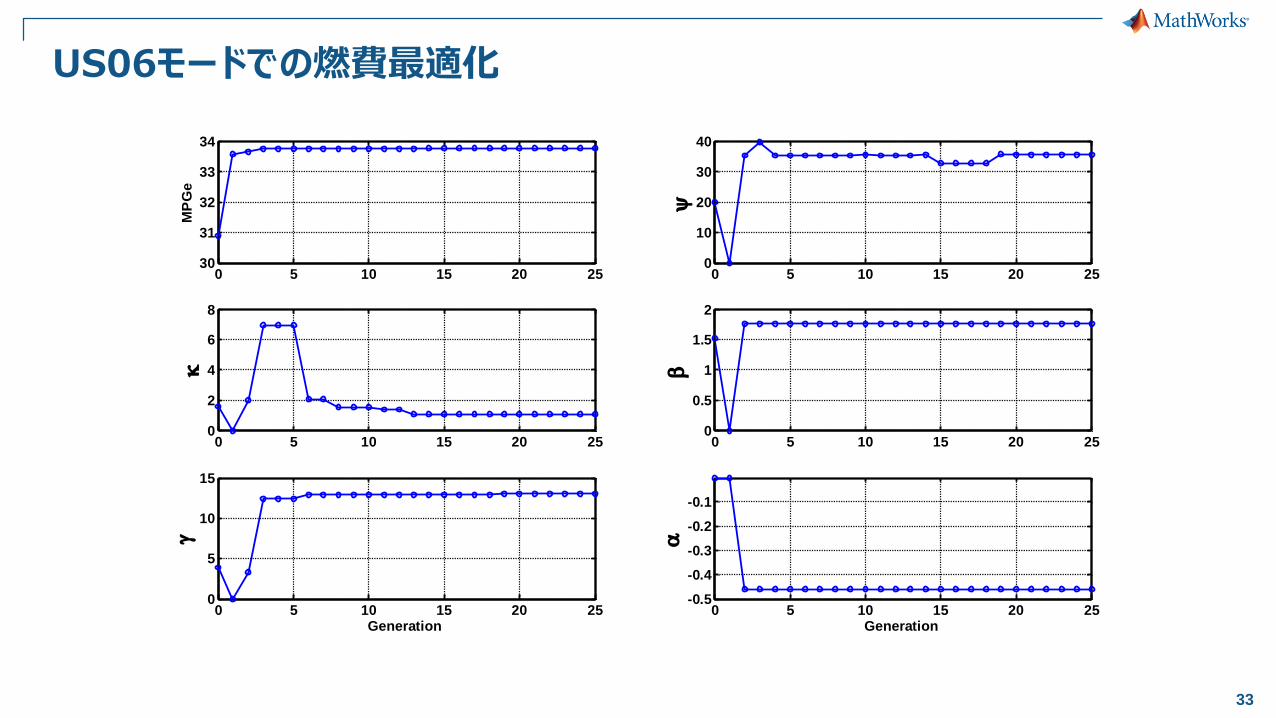
US06モードでの燃費最適化
0 5 10 15 20 2530
31
32
33
34
MP
Ge
0 5 10 15 20 250
10
20
30
40
0 5 10 15 20 250
2
4
6
8
0 5 10 15 20 250
0.5
1
1.5
2
0 5 10 15 20 250
5
10
15
Generation0 5 10 15 20 25
-0.5
-0.4
-0.3
-0.2
-0.1
Generation

34
HEV 並列計算のスケーリング
ノートPC/デスクトップ
– 簡単
– 計算規模に制限あり
40 コアのインテルシステム
– 簡単、高速
– 高価
Amazon EC2
– 高速、オンデマンド
– 低価格
– 適用フェースが早い
http://www.mathworks.com/discovery/matlab-ec2.html

35
最適化結果
燃費は13.14km/L から 14.37km/Lを改善 (+9.4%)
計算時間は27日から0.5日に
0 50 100 1500
1000
2000
3000
4000
5000
6000
7000
8000
Vehicle Speed [kph]
Re
qu
este
d T
rac
tive
Fo
rce [
N]
EV SHEV
Engine / Power Split
Nominal Optimized
0 50 100 1500
1000
2000
3000
4000
5000
6000
7000
8000
Vehicle Speed [kph]
Re
qu
este
d T
rac
tive
Fo
rce [
N]
EV
SHEV
Engine /Power Split

36
まとめ
物理モデリングツールによる車両全体モデルの直観的な構築
モデルを活用した走行モード制御ロジックの開発
車両全体シミュレーションによる燃費の最適化
SimscapeSimscape PowerSystemsSimscape ElectronicsSimscape Driveline
Stateflow
Global Optimization ToolboxParallel Computing Toolbox

37
その他の適用事例
パワーショベル
冷却/空調サイクル
パワーウィンドウ
デュアル・クラッチ・トランスミッション
パワーステアリング
38
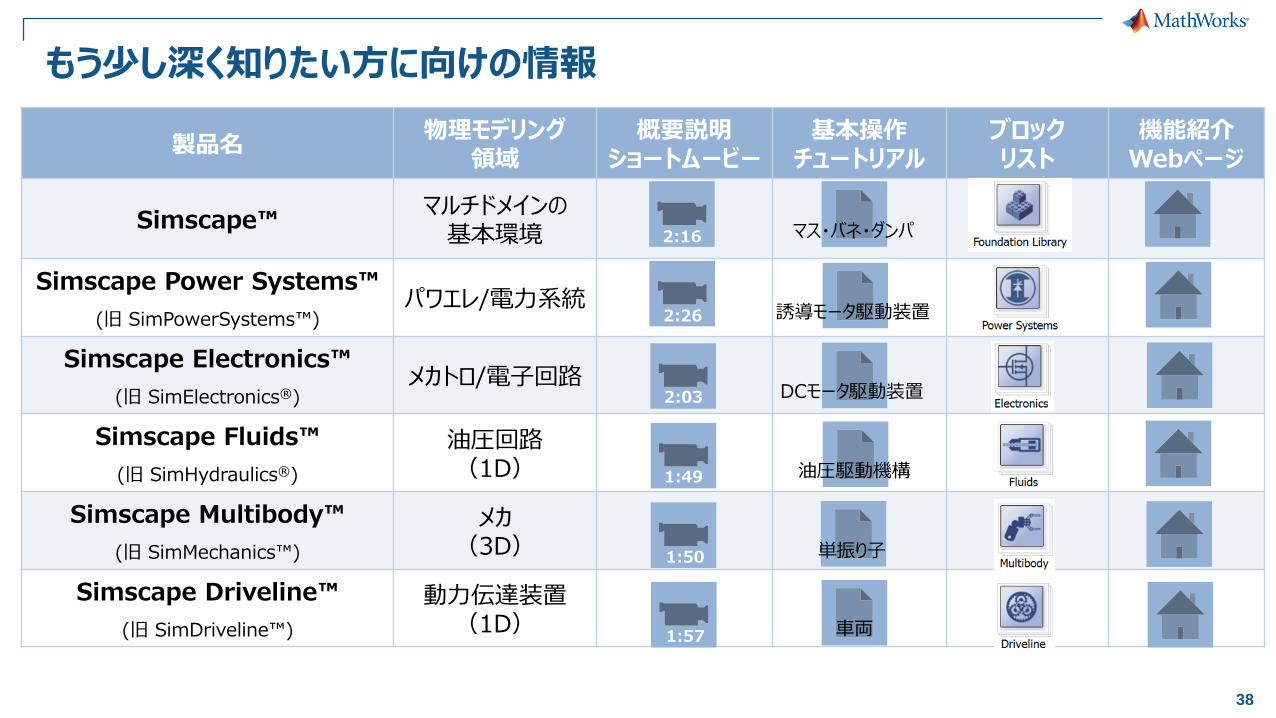
もう少し深く知りたい方に向けの情報
製品名物理モデリング
領域概要説明
ショートムービー基本操作
チュートリアルブロックリスト
機能紹介Webページ
Simscape™マルチドメインの基本環境
Simscape Power Systems™
(旧 SimPowerSystems™)パワエレ/電力系統
Simscape Electronics™
(旧 SimElectronics®)メカトロ/電子回路
Simscape Fluids™
(旧 SimHydraulics®)
油圧回路(1D)
Simscape Multibody™
(旧 SimMechanics™)
メカ(3D)
Simscape Driveline™
(旧 SimDriveline™)
動力伝達装置(1D)
マス・バネ・ダンパ
誘導モータ駆動装置
DCモータ駆動装置
油圧駆動機構
単振り子
車両
2:16
2:26
2:03
1:49
1:50
1:57
39
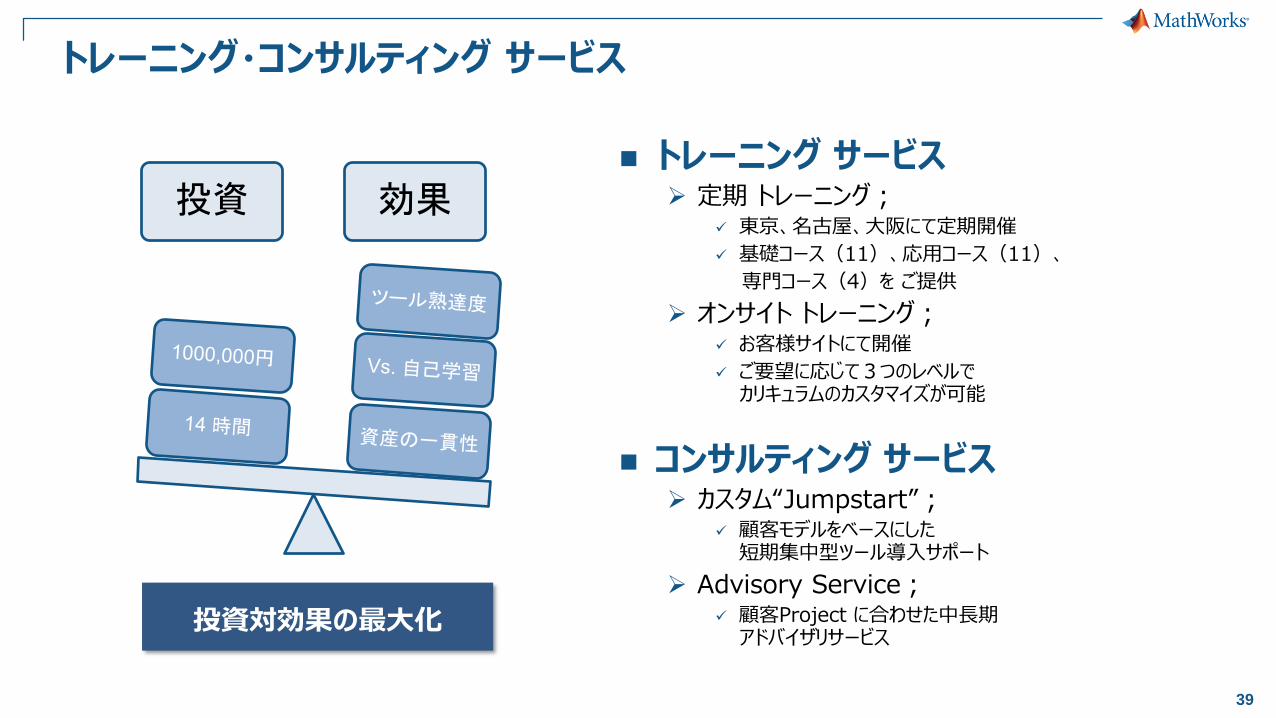
トレーニング・コンサルティング サービス
トレーニング サービス 定期 トレーニング;
東京、名古屋、大阪にて定期開催
基礎コース(11)、応用コース(11)、
専門コース(4)を ご提供
オンサイト トレーニング; お客様サイトにて開催
ご要望に応じて3つのレベルでカリキュラムのカスタマイズが可能
コンサルティング サービス カスタム“Jumpstart”;
顧客モデルをベースにした短期集中型ツール導入サポート
Advisory Service; 顧客Project に合わせた中長期アドバイザリサービス
投資 効果
投資対効果の最大化

40
技術トレーニングサービスについて
習熟度合わせてコースを選択いただくことで無理なくスキルアップを図れます
(e.g. 制御システムエンジニア向けトレーニング)
Programming Xilinx Zynq SoCs with MATLAB and Simulink
Simulink モデルの管理
Embedded Coder による量産向けコード生成
MATLAB/Simulink によるモデルベース開発
MATLAB と Simulink による制御設計
Simscape によるマルチドメインシステムの物理モデリング
SimPowerSystemsによる電力系統の物理モデリング
Simulink モデルの検証と妥当性確認
MATLAB 基礎
Simulink 基礎
Stateflow基礎
リアルタイム コードの生成およびテストの基礎
専門
応用
基礎
41
© 2016 The MathWorks, Inc. MATLAB and Simulink are registered trademarks of
The MathWorks, Inc. See www.mathworks.com/trademarks for a list of additional
trademarks. Other product or brand names may be trademarks or registered
trademarks of their respective holders.
Accelerating the pace of engineering and science